xy数控工作台课程设计样本
- 格式:doc
- 大小:6.60 MB
- 文档页数:26
课程设计--X-Y数控进给工作台设计目录一前言 (3)二课程设计的目的、意义及要求 (4)(一)课程设计的目的、意义 (4)(二)课程设计的要求 (4)三课程设计的内容 (5)(一)课程设计的题目 (5)(二)课程设计的内容 (5)四数控系统总体方案的确定 (6)五机械部分设计 (7)(一)工作台外形尺寸及重量初步估算 (7)(二)滚动导轨副的计算、选择 (8)(三)滚珠丝杠计算、选择 (9)(四)电机的选择 (12)(五)联轴器的选择 (13)(六)光电编码盘的选择 (13)(七)光电开关、接近开关的选择 (13)六控制系统部分设计 (14)(一)面板的布置图 (14)(二)操作面板功能介绍 (14)(三)控制系统选用芯片介绍······················································ (14)(四)芯片地址 (15)(五)电动机控制原理 (15)(六)键盘接口电路分析 (16)(七)光电编码盘辨向电路 (16)七程序流程图 (17)(一)主程序流程图 (17)(二)自动运行流程图 (18)(三)限位开关中断流程图 (19)(四)回零键流程图 (19)八参考文献 (20)一前言装备工业的技术水平和现代化程度决定着整个国民经济的水平和现代化程度 ,数控技术及装备是发展新兴高新技术产业和尖端工业的使能技术和最基本的装备 ,又是当今先进制造技术和装备最核心的技术。
![XY数控工作台设计说明书范文[1]](https://img.taocdn.com/s1/m/9f11978a31b765ce050814f6.png)
适用标准文案1、整体方案设计设计任务课程设计任务:设计两轴联动的数控 X-Y 运动平台,达成机械系统设计、控制系统设计与相应软件编程,依据实验条件进行调试,达成整个开发系统。
主要参数见下表:系列型号行程台面尺寸底座外形尺寸最大负载XY最大重复定定位X Y C B H C1B1H1长度重量挪动速位精度L N度HXY-4025400250240254156505001847785001M/分±整体方案确立方案确立思想方案一:机械部分传动:滚珠丝杠螺母副支撑:双推 - 双推式滑动导轨控制部分控制器件:单片机控制方式:开环控制伺服电机:步进电动机长处:采纳滚珠丝杠螺母副,可实现旋转运动与直线运动互相变换,在拥有螺旋槽的丝杠螺母中装有滚珠作为中间传动元件,以减少摩擦。
长处是摩擦系数小,传动效率高,敏捷度高,传动安稳,不易产生滑行,传动精度和定位精度高;磨损小,使用寿命长,精度保持性好。
双推式支撑实现高精度传动,采纳单片机控制步进电动机,响应迅速而正确。
弊端:滚珠丝杠螺母副的不足在于制造工艺复杂,成本高,不可以自锁,故需附带制动装置。
开环控制精度比较低。
方案二:机械部分传动:同步带传动支撑:滑动导轨控制部分控制器件:单片机控制方式:开环控制伺服电机:直流无刷电机长处:适用标准文案同步带传动无相对滑动,传动比正确,传动精度高,齿形带的强度高,厚度小、重量轻,故可用于高速传动;传动比恒定,同步带无需特别涨紧,因此作用于轴和轴承等上的载荷小,传动效率高。
单片机控制直流无刷电机,空载电流小,效率高。
弊端:同步带工作时候有温度要求,安装精度要求较高,中心间距要求较高,有时需要张紧,安装麻烦。
无刷直流电机启动时有震动,控制器要求高,价钱高。
采纳开环精度较低。
方案三:机械部分传动:齿轮齿条支撑:直线导轨控制部分控制器件:单片机控制方式:闭环控制伺服电机:直流无刷电机长处:齿轮齿条传动功率大,精度高,稳固性好,响应速度快。
目录一、总体 (2)二、机械结构设计 (3)1、脉冲当量和传动比的确定 (3)2、机械部件(工作台)总体尺寸 (3)3、工作载荷分析及计算 (4)4、滚珠丝杠螺母副的选型和校核 (6)5、导轨的选型和计算 (11)6、联轴器的选择及计算 (12)7、传动系统等效转动惯量计算 (13)8、步进电机的选用 (14)三、控制系统设计 (18)1、数控系统硬件电路设计 (18)2、系统控制软件的设计 (22)参考文献 (24)一、总体1、总体参数设计一个数控XY工作台及其控制系统。
该工作台可安装在铣床上,用于铣削加工。
已知的设计参数如下:2、开、半闭、闭环选择开环伺服系统——步进电机驱动——没有检测装置半闭环伺服系统——交流或直流伺服电机驱动——脉冲编码器——速度反馈闭环伺服系统——交流或直流伺服电机驱动——位置检测装置——位置反馈本设计采用开环步进电机驱动。
3、传动初步设计电动机——联轴器——滚珠丝杠——工作台4、系统组成框图5、机械传动系统简图X 轴与Y 轴的传动系统简图都如图所示二、机械结构设计1、脉冲当量和传动比的确定1.1、脉冲当量的确定根据机床或工作台进给系统所需要的定位精度来选定脉冲当量。
考虑到机械传动系统的误差存在,脉冲当量值必须小于定位精度值。
本次设计给定脉冲当量 为 =0.01mm 。
1.2、传动比的确定传动比计算公式:Pb L i δθ3600=专业课课程设计指导书(2-1) 其中:b θ为步进电机的步距角,0L 为滚珠丝杠导程,P δ为系统脉冲当量。
根据传动设计,采用联轴器, 选电动机型号为55BF009,其步矩角b θ=︒9.0,选丝杠规格为2004-3(FYND) 其导程为4mm ,mm P 01.0=δ。
则其传动比101.036049.03600=⨯⨯==P b L i δθ 2、机械部件(工作台)总体尺寸pδ2、1初定工作台的尺寸由于工作台的加工范围为X =200mm ,Y =150mm 。
机电一体化课程设计任务书机电一体化课程设计是一个重要的实践教学环节,要求学生综合应用所学过的机械、电子、计算机和自动控制等方面的知识,独立进行一次机电结合的设计训练。
一、课程设计目的1.学习机电一体化系统总体设计方案的拟定。
2.通过对机械系统的设计,掌握几种典型传动元件遇到像元件的工作原理与选用原则。
3.通过进给伺服系统的设计,掌握常用伺服电动机的工作原理、计算选择方法与控制驱动方式。
4.通过对控制系统的设计,掌握一些典型硬件接口回路和控制软件的设计思路。
5.培养学生独立分析问题和解决问题的能力,并培养系统设计的思想。
6.提高学生应用手册和标准、查阅文献资料以及撰写科技论文的能力。
二、课程设计的内容课程设计题目:单轴数控工作台机电系统设计设计内容由机械系统、控制系统、设计说明书三部分组成。
具体工作量要求如下:1、单轴数控工作台装配图(A3图1张)2、控制系统设计(电气原理图:A3图1张)完成硬件电路设计工作,设计控制系统的主要软件流程并编写程序。
条件允许时,尽可能进行调试试验。
3、设计任务书(一份)要求清楚地叙述整个设计过程和详细的设计内容,包括总体方案分析,机械系统的结构设计,主要零部件的计算与选型,控制系统的电路原理分析,软件设计流程和程序。
说明书字数不少于5000字,要求内容丰富,条理清晰,图文并茂,符合国标。
三、课程设计的时间安排课程设计时间为4周,进度安排如下:1.分析设计任务,总体方案论证:2-3天2.机械系统设计:5-6天3.控制系统设计:4-5天4.软件设计:1-2天5.编写说明书:2-3天四、设计任务设计任务:设计一种供立式数控铣床使用的单轴数控工作台,控制器选用:单片机任务分配:1、107040201班12位同学做第一组~第六组2、107040202班25位同学做第七组~第十九组3、107040203班7位同学做第十九组~第二十二组4、第十九组由2班的周伟同学(X轴)和3班的陈科龙(Y轴)同学完成5、任务分配按名单顺序。
课程设计课程名称:数控技术课程设计学院:机械学院专业:机械设计制造及其自动化姓名:学号:年级:任课教师:2012年 1 月 16 日课程设计任务书课程设计(论文)任务书学生姓名:指导教师:任务书发出时间2011年12月25日设计时间2011年12月26日——2012年1月16日设计(论文)题目数控技术课程设计设计(论文)内容①结合设计任务的要求拟定总体机械和电气控制设计方案。
②根据拟定的机械设计方案进行二坐标数控工作台的机械结构设计计算和元件的选用。
③根据拟定的电气设计方案进行数控系统控制电路的框图设计及驱动控制电路的计算和元件选用。
④根据指定要求进行有关软件的流程图设计。
⑤对指定的软件程序进行编写。
⑥进行机械结构的工程图和电气原理图的绘制。
⑦编写设计说明书。
设计(论文)的要求(含说明书页数、图纸份量)①方案拟定正确。
②设计计算根据来源可靠,计算数据准确无误。
③元气件选用正确规范符合国家颁布标准。
④机械结构图纸绘制视图完整、符合最新国家标准,图面整洁、质量高。
⑤电气部份图纸要求符合国家标准,图面布局合理、整洁、质量高。
⑥机械和电气部份图纸总量为 1.5 张“0”号图量,其中含机械装配图1~2张、电气控制原理框图及计算机I/O接口和驱动控制电路等电气原理图1~2张。
⑦课程设计说明书应阐述整个设计内容:如课题来源现实意义、总体方案确定、系统框图分析、电气执行元件的选用说明、机械传动和驱动电路的设计计算以及机械和电气的其它部分。
说明书要突出重点和特色,图文并茂、文字通畅、计算正确、字迹清晰、内容完整。
说明书页数不少于 20 页目录摘要 (1)第一章前言 (1)第二章设计任务 (2)第三章设计主要步骤 (2)3.1 确定设计总方案 (2)3.1.1机械传动部件的选择 (2)3.1.2 控制系统的设计 (3)3.2 机械传动部件的计算和选择 (4)3.2.1 工作台外形尺寸及重量初步估算 (4)3.2.2 计算切削力 (5)3.2.3滚动导轨的设计计算 (6)3.2.4 滚珠丝杠传动设计计算及校验 (8)3.2.5 步进电机的传动计算及电动机的选用 (12)第四章控制系统的设计 (19)4.1 进给控制系统原理框图 (20)4.2 驱动电路流程设计 (20)4.3 驱动电源的选用,及驱动电源与控制器的接线方式 (21)第五章驱动电路设计 (22)5.1 驱动电路的时间常数 (22)5.2 电源电路的确定 (22)5.3 元器件的确定 (23)5.3.1 确定三极管 (23)5.3.2 确定R2和R3 (23)第六章机械部分装配图的绘制 (24)第七章结论 (24)参考文献 (25)致谢 (26)贵州大学本科课程设计论文机电摘要当今世界电子技术迅速发展,微处理器、微型计算机在各技术领域得到了广泛应用,对各领域技术的发展起到了极大的推动作用。
《数控机床》课程设计说明书课题名称X-Y数控工作台设计学院机械工程学院专业机械工程及自动化班级学号姓名指导教师2015年 6 月 25 日数控技术及数控机床在当今机械制造业中的重要地位和巨大效益,显示了其在国家基础工业现代化中的战略性作用,并已成为传统机械制造工业提升改造和实现自动化、柔性化、集成化生产的重要手段和标志。
数控技术及数控机床的广泛应用,给机械制造业的产业结构、产品种类和档次以及生产方式带来了革命性的变化。
X-Y数控工作台是数控机床的重要组成部分,其制造精度对数控机床的精度有着重要的影响。
X-Y数控工作台通常由导轨座、移动滑块、工作、滚珠丝杠螺母副以及伺服电动机等部件构成。
本次课程设计内容主要是对数控铣床的X-Y数控工作台的滚珠丝杠螺母副、步进电机、导轨副的计算和选用。
关键词:数控机床开环控制滚珠丝杠步进电动机滚动导轨一、设计的目的 (1)二、设计任务 (1)三、设计主要步骤 (1)(一)确定设计总体方案 (1)1. 机械传动部件的选择。
(1)2. 控制系统的设计,完成进给控制系统原理框图及步进电机的控制驱动。
.. 2(二)机械传动部件的计算与选型 (2)1.导轨上移动部件的重量估算。
(2)2. 计算切削力。
(3)(三)滚珠丝杠传动的设计计算及效验。
(4)1. 最大工作载荷的计算。
(4)2. 最大计算动载荷的确定。
(4)3. 规格型号的初选。
(5)4. 传动效率的计算。
(6)5. 刚度的验算。
(7)6. 稳定性的验算。
(7)7. 临界转速的验算。
(8)8. 滚珠丝杠的选型及安装连接尺寸的确定。
(9)(四)步进电动机的传动计算及电动机选用。
(12)1.传动计算 (12)2.步进电动机的计算及选型。
(12)3. 步进电动机转轴上的等效负载转矩M的计算。
(15)(五)滚动导轨的设计计算 (18)1.工作载荷的计算。
(18)2. 小时额定工作寿命的计算。
(19)3. 距离额定寿命的计算。

数控xy工作台课程设计一、课程目标知识目标:1. 学生能理解数控xy工作台的基本结构及其功能,掌握相关术语和概念。
2. 学生能描述数控xy工作台的运动原理和控制系统的工作方式。
3. 学生能解释数控编程中的基本指令,并运用这些指令进行简单图形的编程。
技能目标:1. 学生能够操作数控xy工作台,进行基本的定位和移动。
2. 学生能够运用数控编程软件,编写简单的数控加工程序。
3. 学生能够根据设计要求,制定简单的数控加工工艺。
情感态度价值观目标:1. 培养学生对数控技术的兴趣,激发其探索精神和创新意识。
2. 培养学生团队合作意识,提高沟通协调能力。
3. 增强学生的安全意识,使其养成良好的操作习惯。
课程性质:本课程为实践性较强的课程,旨在通过理论教学与实践操作相结合,帮助学生掌握数控xy工作台的基本知识和操作技能。
学生特点:学生具备一定的机械基础知识,但对数控技术了解有限,动手能力有待提高。
教学要求:结合学生特点,注重理论与实践相结合,强调实践操作,培养学生的实际操作能力和解决问题的能力。
通过分解课程目标为具体的学习成果,使学生在学习过程中能够明确任务,有针对性地提高自身能力。
二、教学内容1. 数控xy工作台结构原理- 介绍数控xy工作台的基本组成,包括硬件和软件部分。
- 深入解析工作台的运动结构,如导轨、丝杠、电机等。
- 指导学生了解并区分不同类型的数控系统。
2. 数控编程基础- 概述数控编程的基本概念,如程序段、指令、坐标系等。
- 教授常用编程指令,如G代码、M代码及其功能。
- 结合实例,指导学生进行简单图形的编程。
3. 数控加工工艺- 介绍数控加工工艺的基本原则和流程。
- 分析不同材料、刀具对加工工艺的影响。
- 指导学生根据设计要求制定加工工艺。
4. 数控xy工作台操作- 详解数控xy工作台的操作步骤和安全注意事项。
- 演示基本操作,如手动、自动运行,程序输入等。
- 安排学生进行实操练习,提高操作熟练度。

X-Y 数控工作台课程设计一、总体方案设计1.1 设计任务题目:X —Y 数控工作台的机电系统设计任务:设计一种供立式数控铣床使用的X —Y 数控工作台,主要参数如下: (1)工作台面尺寸C ×B ×H =185mm ×195mm ×27mm ; (2)底座外形尺寸C1×B1×H1=385mm ×385mm ×235mm ; (3)工作台加工范围X=115mm Y=115mm ;(4) X 、Y 方向的脉冲当量均为0.005mm 、脉冲;X 、Y 方向的定位精度均为±0.01mm ;(5)负载重量G=235N ;(6)工作台空载最快移动速度为3m/min ; 工作台进给最快移动速度为1m/min 。
(7)立铣刀的最大直径d=20mm ; (8)立铣刀齿数Z=3;(9)最大铣削宽度20e a mm ;(10)最大被吃刀量10p a mm 。
1.2总体方案的确定图1-1 系统总体框图(1)机械传动部件的选择 ① 导轨副的选择要设计的X-Y 工作台是用来配套轻型的立式数控铣床,需要承载的载荷不大,但脉冲当量小,定位精度高,因此,决定选用直线滚动导轨副,它具有摩擦系数小、不易爬行、传动效率高、结构紧凑、安装预紧方便等优点。
② 丝杠螺母副的选择伺服电动机的旋转运动需要通过丝杠螺母副转换成直线运动,要满足0.005mm 的脉冲当量和±0.01mm 的定位精度,滑动丝杠副无能为力,只有选用滚珠丝杠副才能达到。
滚珠丝杠副的传动精度高、动态响应快、运转平稳、寿命长、效率高、预紧后可消除反向间隙,而且滚珠丝杠已经系列化,选用非常方便,有利于提高开发效率。
③ 减速装置的选择选择了步进电动机和滚珠丝杠副以后,为了圆整脉冲当量,放大电动机的输出转矩,降低运动部件折算到电动机转轴上的转动惯量,可能需要减速装置,且应有消除间隙机构。
一、课程设的计目的通过本次设计,能够全面地、系统地了解和掌握数控机床的基本内容和基本知识,初步掌握数控机床系统设计方法,并能学会运用手册、标准等技术资料。
同时,培养相应的创新意识、工程意识和动手能力。
二、课程的设计要求1、课程设计应在老师的指导下由学生独立完成,严格要求自己,不许相互抄袭;2、设计前认真阅读《课程设计指导书》,明确设计题目及具体要求;3、认真查阅题目所涉及内容的相关资料、手册、标准,大胆创新,确定合理、可行的总体设计方案;4、绘出数控XY工作台机械部分装配图设计(A0),总装联系图(A4),工作台、支承座、螺母座等零件图,绘图符合国家标准,布图合理,内容表达完整清晰:5、设计说明书(不少于20页)。
要求:说明书中的有关公式应标明出处;所引用的附图及表格应附在说明书中相应位置,并有相应的说明;设计说明书格式参考教务处毕业设计论文格式的要求。
三、课程设计的内容和步骤内容:设计一套简易数控XY工作台,固定在某一钻床的工作台上,XY工作台的位置控制采用步进电机数控系统。
通过上述方案将该普通钻床改装成简易的经济型数控钻床。
(一)总体设计方案1、设计机构的性能要求(1)具有高的静、动态刚度和良好的抗振性能(2)具有较高的几何精度、传动精度、定位精度和热稳定性(3)具有实现辅助操作自动化的结构部件2、待改装钻床型号的确定型号Z51100/ProductShow.asp?ID=6223、控制方式的确定控制方式按运动轨迹分类,可分为点位控制、直线控制和轮廓控制三种。
点位控制的特点是只控制刀具相对于工件定位点的位置精度,不控制点与点之间的运动轨迹,在移动过程中刀具不进行切削;直线控制的特点是除了控制起点与终点之间的准确位置外,而且要求刀具由一点到另一点之间的运动轨迹为直线,并能控制位移的速度;轮廓控制的特点是能够对两个或两个以上的坐标轴方向同时进行连续控制,并能够对位移和速度进行严格地、不断地控制。
X-Y 数控工作台课程设计一、总体方案设计1.1 设计任务题目:X —Y 数控工作台的机电系统设计任务:设计一种供立式数控铣床使用的X —Y 数控工作台,主要参数如下: (1)工作台面尺寸C ×B ×H =185mm ×195mm ×27mm ; (2)底座外形尺寸C1×B1×H1=385mm ×385mm ×235mm ; (3)工作台加工范围X=115mm Y=115mm ;(4) X 、Y 方向的脉冲当量均为0.005mm 、脉冲;X 、Y 方向的定位精度均为±0.01mm ;(5)负载重量G=235N ;(6)工作台空载最快移动速度为3m/min ; 工作台进给最快移动速度为1m/min 。
(7)立铣刀的最大直径d=20mm ; (8)立铣刀齿数Z=3;(9)最大铣削宽度20e a mm ;(10)最大被吃刀量10p a mm 。
1.2总体方案的确定图1-1 系统总体框图(1)机械传动部件的选择 ① 导轨副的选择要设计的X-Y 工作台是用来配套轻型的立式数控铣床,需要承载的载荷不大,但脉冲当量小,定位精度高,因此,决定选用直线滚动导轨副,它具有摩擦系数小、不易爬行、传动效率高、结构紧凑、安装预紧方便等优点。
② 丝杠螺母副的选择伺服电动机的旋转运动需要通过丝杠螺母副转换成直线运动,要满足0.005mm 的脉冲当量和±0.01mm 的定位精度,滑动丝杠副无能为力,只有选用滚珠丝杠副才能达到。
滚珠丝杠副的传动精度高、动态响应快、运转平稳、寿命长、效率高、预紧后可消除反向间隙,而且滚珠丝杠已经系列化,选用非常方便,有利于提高开发效率。
③ 减速装置的选择选择了步进电动机和滚珠丝杠副以后,为了圆整脉冲当量,放大电动机的输出转矩,降低运动部件折算到电动机转轴上的转动惯量,可能需要减速装置,且应有消除间隙机构。
数控机床课程设计说明书设计课题: X-Y数控工作台设计院别:专业班级:学号:姓名:指导老师:摘要.......................................................... I I 一前言. (1)二设计任务 (1)三设计主要步骤 (2)(一)确定设计总体方案 (2)1、初拟机械传动部件方案: (2)2、方案对比分析: (2)3、最终方案: (3)(二)机械传动部件的计算与选型 (3)1 导轨上移动部件的重量估算。
(3)2 计算切削力 (3)3 滚珠丝杠传动设计计算及校验 (5)4 步进电机的传动计算及电动机的选用 (10)5 滑动导轨的设计计算 (16)6 其余部件的选取 (17)结论 (20)致谢 (21)参考文献 (21)21世纪以来,人类经济高速发展,人们生活发生了日新月异的变化,微处理器、微型计算机在各技术领域得到了广泛应用,对各领域技术的发展起到了极大的推动作用。
一个较完善的机电一体化系统,应包含以下几个基本要素:机械本体、动力与驱动部分、执行机构、传感测试部分、控制及信息处理部分。
机电一体化是系统技术、计算机与信息处理技术、自动控制技术、检测传感技术、伺服传动技术和机械技术等多学科技术领域综合交叉的技术密集型系统工程。
新一代的CNC系统这类典型机电一体化产品正朝着高性能、智能化、系统化以及轻量、微型化方向发展。
关键字:十字工作台;滚珠丝杠;滚动导轨;步进电机Since the 21st century, the human economy has developed high speed, the people live have had the change which changes with each new day, the microprocessor, the microcomputer obtain the widespread application in various area of technology, to various domains technology development enormous promotion effect. A perfect integration of machinery system, should contain the following several base elements: Basic machine, power and actuation part, implementing agency, sensing measurement component, control and information processing part. The integration of machinery is the system technology, the computer and the information processing and management technology, the automatic control technology, the examination sensing technology, the servo drive technology and the mechanical skill and so on multi-disciplinary area of technology synthesis overlapping technology-intensive systems engineering. New generation's CNC system this kind of model integration of machinery product toward the high performance, the intellectualization, the systematization as well as the featherweight, the microminiaturized direction develops.key words: Cross table Ball screw Rolling guide Stepper motor一 前言当今世界数控技术及装备发展的趋势及我国数控装备技术发展和产业化的现状 在我国对外开放进一步深化的新环境下 ,发展我国数控技术及装备、提高我国制造业信息化水平和国际竞争能力的重要性 ,并从战略和策略两个层面提出了发展我国数控技术及装备的几点看法。

数控xy工作台课程设计一、教学目标本课程的教学目标是使学生掌握数控XY工作台的基本原理、结构及其操作方法。
通过本课程的学习,学生应能理解数控XY工作台的工作原理,熟悉其结构组成,并能熟练操作数控XY工作台进行各种加工操作。
1.了解数控XY工作台的工作原理。
2.熟悉数控XY工作台的结构组成。
3.掌握数控XY工作台的操作方法。
4.能够正确操作数控XY工作台。
5.能够根据加工要求进行参数设置。
6.能够进行数控XY工作台的维护和故障排除。
情感态度价值观目标:1.培养学生的团队合作意识。
2.培养学生的创新精神和实践能力。
3.培养学生的职业素养,使其具备良好的工作态度和职业道德。
二、教学内容本课程的教学内容主要包括数控XY工作台的基本原理、结构组成及其操作方法。
1.数控XY工作台的基本原理:介绍数控XY工作台的工作原理,包括数控系统的组成、工作原理及其与XY工作台的关系。
2.数控XY工作台的结构组成:介绍数控XY工作台的各个部分,包括主机、控制系统、执行机构等,并详细讲解各部分的功能和作用。
3.数控XY工作台的操作方法:讲解如何进行数控XY工作台的操作,包括操作界面、操作步骤、参数设置等,并通过实际操作演示,使学生能够熟练掌握。
三、教学方法本课程采用讲授法、讨论法、实验法等多种教学方法相结合,以激发学生的学习兴趣和主动性。
1.讲授法:通过讲解数控XY工作台的基本原理、结构组成及其操作方法,使学生掌握相关知识。
2.讨论法:学生进行分组讨论,引导学生思考和分析数控XY工作台的相关问题,提高学生的解决问题的能力。
3.实验法:安排实际操作实验,使学生能够将所学知识运用到实际操作中,提高学生的实践能力。
四、教学资源本课程所需教学资源包括教材、实验设备等。
1.教材:选用权威、实用的教材,为学生提供系统的学习资料。
2.实验设备:准备现代化的数控XY工作台设备,供学生进行实际操作练习。
通过以上教学资源的支持,为学生创造良好的学习环境,提高学生的学习效果。
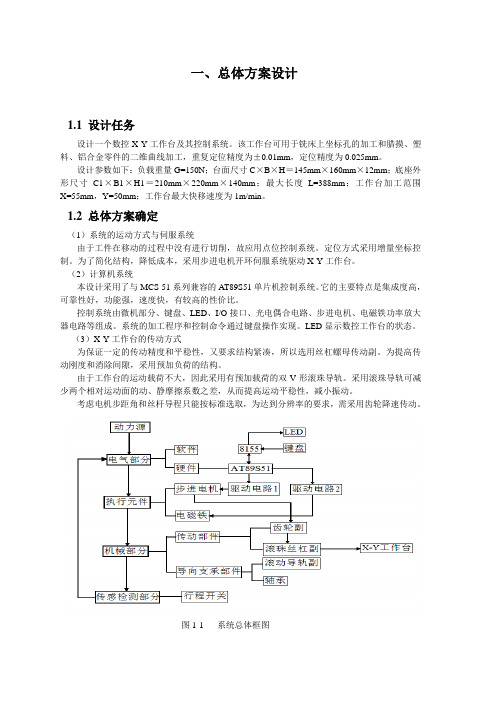
一、总体方案设计1.1 设计任务设计一个数控X-Y工作台及其控制系统。
该工作台可用于铣床上坐标孔的加工和腊摸、塑料、铝合金零件的二维曲线加工,重复定位精度为±0.01mm,定位精度为0.025mm。
设计参数如下:负载重量G=150N;台面尺寸C×B×H=145mm×160mm×12mm;底座外形尺寸C1×B1×H1=210mm×220mm×140mm;最大长度L=388mm;工作台加工范围X=55mm,Y=50mm;工作台最大快移速度为1m/min。
1.2 总体方案确定(1)系统的运动方式与伺服系统由于工件在移动的过程中没有进行切削,故应用点位控制系统。
定位方式采用增量坐标控制。
为了简化结构,降低成本,采用步进电机开环伺服系统驱动X-Y工作台。
(2)计算机系统本设计采用了与MCS-51系列兼容的AT89S51单片机控制系统。
它的主要特点是集成度高,可靠性好,功能强,速度快,有较高的性价比。
控制系统由微机部分、键盘、LED、I/O接口、光电偶合电路、步进电机、电磁铁功率放大器电路等组成。
系统的加工程序和控制命令通过键盘操作实现。
LED显示数控工作台的状态。
(3)X-Y工作台的传动方式为保证一定的传动精度和平稳性,又要求结构紧凑,所以选用丝杠螺母传动副。
为提高传动刚度和消除间隙,采用预加负荷的结构。
由于工作台的运动载荷不大,因此采用有预加载荷的双V形滚珠导轨。
采用滚珠导轨可减少两个相对运动面的动、静摩擦系数之差,从而提高运动平稳性,减小振动。
考虑电机步距角和丝杆导程只能按标准选取,为达到分辨率的要求,需采用齿轮降速传动。
图1-1 系统总体框图二、机械系统设计2.1、工作台外形尺寸及重量估算X 向拖板(上拖板)尺寸:长⨯宽⨯高 145×160×50 重量:按重量=体积×材料比重估算3214516050107.81090--⨯⨯⨯⨯⨯≈NY 向拖板(下拖板)尺寸: 14516050⨯⨯ 重量:约90N 。
本科生专业课程设计
学生姓名:
学号:
专业名称:
班级:
指导教师:
5 月
目录
任务书....................................................................... 错误!未定义书签。
二、总体方案的确定.................................................... 错误!未定义书签。
三、机械传动部件的计算与选型................................ 错误!未定义书签。
四、工作台机械装配图的绘制.................................... 错误!未定义书签。
五、工作台控制系统的设计........................................ 错误!未定义书签。
参考文献 ......................................................................... 错误!未定义书签。
附件1 .............................................................................. 错误!未定义书签。
附件2 .............................................................................. 错误!未定义书签。
附件3 .............................................................................. 错误!未定义书签。
附件4 .............................................................................. 错误!未定义书签。
任 务 书
设计题目: X-Y 数控工作台机电系统设计 设计任务:
设计一台微机控制XY 两坐标工作台, 供立式数控铣床使用。
具体内容如下:
1、 机械系统设计: 经过计算,正确选择传动机构、 导向机构、 执
行机构、 驱动电机等, 根据计算说明, 绘制机械系统装配图。
2、
控制系统设计: 根据系统要
求, 选择正确的控制策略, 设计合理的控制系统, 并绘制控制系统电路图。
3、 主要程序设计:
在机械系统
设计与控制系统设计的基础上, 进行控制系统的主程序设计, 列出程序清单。
4、
设计说明书撰写。
系统主要参数:
1、 立铣刀最大直径d=20mm
2、 立铣刀齿数
Z=3
3、 最大铣削宽度mm a e 20=
4、 最大背吃刀量mm a p 10=
5、 加工材料为碳素钢或有色金属
6、 X,Y 方向的脉冲当量p mm y x /01.0==δδ
7、 X,Y 方向的定位精度均为±0.01mm
8、 工作台面尺寸为400mm ×500mm(我们这个长度400以下), 加工
范围为200mm ×200mm
9、 工作台空载最快移动速度m in /5000max max mm v v y x == 10、 工作台进给最快移动速度min /350max max mm v v f y f x ==
时间安排及任务:
一、 系统功能介绍、 总体方案设计( 1天)
1. 机电一体化产品设计的基本过程介绍;
2. XY 工作台功能介绍;
3. 总体方案的确定
二、 单元功能模块介绍和设计任务的落实( 1天) 三、 详细设计( 8天)
1.机械系统装配图设计; 2.控制各部分原理图的设计; 3.主功能程序的编制
二、 总体方案的确定 1、 机械传动部件的选择
( 1) 导轨副的选用
要设计的X-Y 工作台是用来配套轻型的立式数控铣床, 需要承载的载荷不大, 但脉冲当量小(p mm y x /01.0==δδ), 定位精度高( min /350max max mm v v f y f x ==) , 因此, 决
定选用直线滚动导轨副, 它具有摩擦系数小、 不易爬行、 传动效率高、 结构紧凑、 安装预紧方便等优点。
选直线滚动导轨副 ( 2) 丝杠螺母副的选用
伺服电动机的旋转运动需要经过丝杠螺母副转换成直线运动, 要满足0.01mm 的脉冲当量和±0.01mm 的定位精度, 滑动丝杠副无能为力, 只有选用滚珠丝杠副才能达到。
滚珠丝杠副的传动精度高、 动态响应快、 运转平稳、 寿命长、 效率高、 预紧后可消除反向间隙, 而且滚珠丝杠已经系列化, 选用非常方便, 有利于提高开发效率。
选滚动丝杠螺母副
( 3) 减速装置的选用
选择了步进电动机和滚珠丝杠副以后, 为了圆整脉冲当量, 放大电动机的输出转矩,
降低运动部件折算到电动机转轴上的转动惯量, 可能需要减速装置, 且应有消除间隙机构。
为此, 系统中决定采用无间隙齿轮传动减速箱。
拟采用减速器
( 4) 伺服电动机的选用
任务书规定的脉冲当量尚未达到0.001mm, 定位精度也未达到微米级, 空载最快移动速度也只有 mm/min 。
因此, 本设计不必采用高档次的伺服电动机, 如交流伺服电动机或直流伺服电动机等, 能够选用性能好一些的步进电动机, 如混合式步进电动机, 以降低成本, 提高性价比。
伺服电机选步
进电机
( 5) 检测装置的选用
选用步进电动机作为伺服电动机后, 可选开环控制, 也可选闭环控制。
任务书所给精度
对于步进电动机来说还是偏高的, 为了确保电动机在运转过程中不受切削负载和电网的影响而失步, 决定采用半闭环控制, 并在电动机的尾部转轴上安装增量式旋转编码器, 用以检测电动机的转角与转速。
增量式旋转编码器的分辨率应与步进电动机的步距角相匹配。
考虑到X 、 Y 两个方向的加工范围相同, 承受的工作载荷相差不大, 为了减少设计工作量, X 、 Y 两个坐标的导轨副、 丝杠螺母副、 减速装置、 伺服电动机, 以及检测装置拟采
检测装置的选用: 增量式旋转编码器。