OptiSystem仿真实例
- 格式:doc
- 大小:2.03 MB
- 文档页数:46

OptiSystem仿真实例-图文目录1光发送机(OpticalTranmitter)设计1.1光发送机简介1.2光发送机设计模型案例:铌酸锂(LiNbO3)型Mach-Zehnder调制器的啁啾(Chirp)分析2光接收机(OpticalReceiver)设计2.1光接收机简介2.2光接收机设计模型案例:PIN光电二极管的噪声分析3光纤(OpticalFiber)系统设计3.1光纤简介3.2光纤设计模型案例:自相位调制(SPM)导致脉冲展宽分析4光放大器(OpticalAmplifier)设计4.1光放大器简介4.2光放大器设计模型案例:EDFA的增益优化5光波分复用系统(WDMSytem)设计5.1光波分复用系统简介5.2光波分复用系统使用OptiSytem设计模型案例:阵列波导光栅波分复用器(AWG)的设计分析6光波系统(LightwaveSytem)设计6.1光波系统简介6.2光波系统使用OptiSytem设计模型案例:40G单模光纤的单信道传输系统设计8.2色散补偿模型设计案例:使用理想色散补偿元件的色散补偿分析8孤子和孤子系统(SolitonSytem)9.1孤子和孤子系统简介9.2孤子系统模型设计案例:9结语1光发送机(OpticalTranmitter)设计1.1光发送机简介一个基本的光通讯系统主要由三个部分构成,如下图1.1所示:图1.1光通讯系统的基本构成1)光发送机2)传输信道3)光接收机作为一个完整的光通讯系统,光发送机是它的一个重要组成部分,它的作用是将电信号转变为光信号,并有效地把光信号送入传输光纤。
光发送机的核心是光源及其驱动电路。
现在广泛应用的有两种半导体光源:发光二级管(LED)和激光二级管(LD)。
其中LED输出的是非相干光,频谱宽,入纤功率小,调制速率低;而LD是相干光输出,频谱窄,入纤功率大、调制速率高。
前者适宜于短距离低速系统,后者适宜于长距离高速系统。
OptiSystem在光纤通信课堂教学中的应用——以光纤传输特性为例王学勤*(枣庄学院光电工程学院 山东枣庄 277160)摘要:为了提高学生的学习兴趣,帮助学生理解、掌握知识点,提升光纤通信课程的教学效果,将OptiSys‐tem软件引入光纤通信课堂教学。
该文以光纤传输特性部分的教学内容为例,针对光纤的损耗、色散和非线性效应三项光纤的传输特性,搭建OptiSystem仿真模型,演示光纤的传输特性对光纤中传输信号的影响,进而分析对光纤通信系统性能的影响。
通过仿真演示,使学生更直观地理解光信号在光纤中传输时的时域、频域变化特征,掌握光纤传输特性对光纤通信系统的影响机理。
关键词:光纤通信 OptiSystem软件 光纤传输特性 课堂教学中图分类号:G642.0文献标识码:A 文章编号:1672-3791(2023)09-0140-05 Application of OptiSystem in the Classroom Teaching ofFiber-optic Communications—Taking Fiber-optic Transmission Characteristics as an ExampleWANG Xueqin*(School of Optoelectronic Engineering, Zaozhuang University, Zaozhuang, Shandong Province, 277160 China) Abstract:In order to improve students' interest in learning, help students understand and master knowledge points, and improve the teaching effect of Fiber-optic Communications, OptiSystem software is introduced to the class‐room teaching of Fiber-optic Communications. Taking the teaching content of fiber-optic transmission character‐istics as an example, aiming at three fiber-optic transmission characteristics: the loss, dispersion and nonlinear effectof optical fibers, this paper builds the OptiSystem simulation model to demonstrate the impact of fiber-optic trans‐mission characteristics on transmission signals in optical fibers, and then analyze the impact on the performance of the fiber-optic communication system. Through the simulation demo, students can more intuitively understand the time-domain and frequency-domain variation characteristics of optical signals when they are transmitted in optical fibers, and master the influence mechanism of fiber-optic transmission characteristics on the fiber-optic communi‐cation system.Key Words: Fiber-optic Communications; OptiSystem software; Fiber-optic transmission characteristic; Classroom teachingOptiSystem是一种光通信系统仿真程序包,具有丰富的组件库,可用于光纤通信系统的建模仿真[1]。

optisystem仿真在光纤通信实验教学中的应用OptiSystem是一种光纤通信系统设计和仿真软件,它可广泛应用于光纤通信实验教学中。
以下是它在该领域应用的一些例子:
1. 光纤传输实验:OptiSystem可以用于模拟和分析不同类型的光纤传输实验,如衰减、色散、非线性效应等。
学生可以通过OptiSystem软件进行实验设计、仿真、优化和性能评估,理解和掌握光纤传输的基本原理。
2. 光调制与解调实验:OptiSystem可以模拟光调制器、解调器等光学器件的性能和特性。
学生可以使用OptiSystem软件设计和优化光调制器/解调器的参数,比较不同解调技术的性能,并了解光调制与解调在光纤通信中的应用。
3. 光纤放大器实验:OptiSystem可以用来模拟和分析光纤放大器的工作原理和性能。
学生可以通过OptiSystem软件了解不同类型的光纤放大器(如EDFA、Raman放大器等)的原理和参数,设计和优化放大器的增益、噪声等参数,并评估放大器的性能。
4. 光纤带宽实验:OptiSystem可以帮助学生理解和研究光纤传输中的带宽限制。
学生可以使用OptiSystem软件进行带宽限制的模拟和分析,通过改变光纤、光源和接收器的参数,研究带宽限制的影响并提出改进方案。
总之,OptiSystem在光纤通信实验教学中具有很大的应用潜力。
它提供了一个
实验环境,让学生能够进行光纤通信系统的设计、仿真和性能评估,从而加深对光纤通信原理和技术的理解。
加上OptiSystem软件的用户友好性和功能强大性,它成为了光纤通信实验教学中不可或缺的工具。


OptiSystem 7入门讲义(中文)此讲义仅适用于OptiSystem光通信仿真软件的初学者。
第一课软件操作入门(Getting started)(上)Optisystem 光通信仿真软件简识OptiSystem (光通信系统设计软件),什么是Optisystem?光通讯系统正在变得日益复杂。
这些系统通常包含多个信号通道、不同的拓扑结构、非线性器件和非高斯噪声源,对们的设计和分析是相当的复杂和需要高强度劳动的。
先进的软件工具使得这些系统的设计和分析变得迅速而有效。
OptiSystem是一款创新的光通讯系统模拟软件包,它集设计、测试和优化各种类型宽带光网络物理层的虚拟光连接等功能于一身,从长距离通讯系统到LANS和MANS都适用。
一个基于实际光纤通讯系统模型的系统级模拟器,OptiSystem 具有强大的模拟环境和真实的器件和系统的分级定义。
它的性能可以通过附加的用户器件库和完整的界面进行扩展,而成为一系列广泛使用的工具。
全面的图形用户界面控制光子器件设计、器件模型和演示。
巨大的有源和无源器件的库包括实际的、波长相关的参数。
参数的扫描和优化允许用户研究特定的器件技术参数对系统性能的影响。
因为是为了符合系统设计者、光通讯工程师、研究人员和学术界的要求而设计的,OptiSystem 满足了急速发展的光子市场对一个强有力而易于使用的光系统设计工具的需求。
优点·投资风险大幅度降低,快速投入市场·快速、低成本的原型设计·系统性能的全面认识·辅助设计容差参数的参数灵敏性评估·面向用户的直观的设计选项和脚本·直接存取大规模的系统特征数据·自动的参数扫描和优化应用OptiSystem允许对物理层任何类型的虚拟光连接和宽带光网络的分析,从远距离通讯到MANS和LANS都适用。
它的广泛应用包括: 物理层的器件级到系统级的光通讯系统设计·CATV或者TDM⁄WDM网络设计·SONET⁄SDH的环形设计,Radio over Fiber系统,自由空间光通信系统(FSO)·传输器、信道、放大器和接收器的设计·色散图设计·不同接受模式下误码率(BER)和系统代价(penalty)的评估·放大的系统BER和连接预算计算主要特点.1.器件库为了完全发挥效率,器件模块应该再现真实器件的实际的性能,确定由于选择精度和效率引起的影响。


optisystem案例OptiSystem是一款光学通信系统设计软件,它可以用于设计、仿真和优化各种光学系统,包括光纤通信、双向通信、WDM系统、光放大器等。
在OptiSystem中,用户可以使用各种成熟的光学组件,如激光器、光检测器、光模式转换器等,并进行光学信号的产生、传输、放大和接收等各个环节的仿真和优化。
下面举例说明OptiSystem在光纤通信系统中的应用。
案例:光纤通信系统设计在通信领域中,光纤通信是一种重要的数据传输思路,它有更高的带宽和更长的传输距离,因此能够满足更高的数据传输要求。
在光纤通信系统中,设计者需要考虑的因素非常多,如损耗、失真、噪声等,这些因素可能会影响信号的传输质量,从而影响通信的稳定性和可靠性。
为了优化光纤通信系统的设计,我们可以使用OptiSystem软件进行仿真和优化。
在OptiSystem中,我们可以按照以下步骤进行光纤通信系统的设计和优化:1.确定光纤通信系统的参数和光学组件首先,我们需要确定光纤通信系统的参数和光学组件。
参数包括通信距离、带宽和信噪比等数据,而光学组件则包括激光器、光纤、光检测器等。
2.建立光纤通信系统的模型然后,我们需要在OptiSystem中建立光纤通信系统的模型。
在OptiSystem中,我们可以使用各种光学组件,如EDFA、VOA、Mux/Demux等,并将它们连接起来构建整个系统。
在建立系统模型时,我们需要输入各个组件的参数,例如信道数量、中心波长、带宽等,并设置各个组件的参数。
3.进行系统仿真在建立系统模型后,我们就可以进行系统仿真。
在OptiSystem中,我们可以通过设置仿真参数来模拟系统运行的不同情况。
我们可以考虑不同的因素,如噪声、失真和损耗等,同时也可以对信号的功率和速率进行分析和优化。
4.分析和优化系统性能最后,我们可以分析和优化系统性能。
在OptiSystem中,我们可以使用各种分析工具,如眼图、波形图、功率谱密度图等,来分析不同因素对系统性能的影响。

基于OptiSystem软件的OCDMA系统仿真作者:张晓燕杨祎来源:《现代电子技术》2010年第07期摘要:分析了采用光素数地址码的异步OCDMA系统设计原理,阐述了OptiSystem软件针对光系统的强大仿真功能。
在设计原理的基础上,采用光纤延时线编码技术给出了基于OptiSystem的异步OCDMA系统仿真模型,得出仿真结果并进行了分析,验证了系统设计的正确性和设计方案的可行性。
关键词:光码分多址; 素数码; 光纤延时; 多用户干扰中图分类号:TN914.53 文献标识码:A文章编号:1004-373X(2010)07-0099-03Simulations of OCDMA System Based on OptiSystem SoftwareZHANG Xiao-yan,YANG Yi(Xi’an University of Posts and Telecommunications, Xi’an 710121, China)Abstract: The principle and design of asynchronous optical code division multiple access (OCDMA) based on the prime code are analyzed, and the OptiSystem simulation software used in optical communication system is introduced. Based on the design principle, a simulation model of OCDMA system which uses the encoder and decoder technologies of fiber-optic delay lines is given. The simulation results are obtained and analyzed. The OCDMA system is proved correct and feasible.Keywords: code division multiple access; prime code; fiber optic delay; multi-user interference 0 引言光网络的大容量、高速率主要取决于多址复用技术,光码分多址(OCDMA)是光纤通信的三大主流信道复用技术之一。
利用Optisystem软件,仿真计算半导体激光器的外部光调制响应引言半导体激光器是一种重要的激光源,广泛应用于通信、医疗和光学传感等领域。
在这些应用中,外部光调制技术被广泛运用于高速光通信和光学传感系统中。
外部光调制是通过外部光束的强度调制来改变激光器的输出特性,从而实现信号传输和调制。
为了更好地理解外部光调制对半导体激光器的影响,我们可以利用Optisystem软件进行仿真计算。
本文将介绍如何使用Optisystem软件进行半导体激光器的外部光调制响应仿真计算。
Optisystem软件简介Optisystem是一款光通信系统设计和仿真软件,提供了丰富的光学元件库和仿真工具,能够帮助用户快速设计、分析和优化复杂的光通信系统。
其仿真结果准确可靠,可以用于验证半导体激光器的性能。
外部光调制原理在外部光调制中,外部光束的强度通过调制器进行调制,并传输到半导体激光器中。
对于半导体激光器来说,外部光调制的主要影响是改变其腔内折射率,从而影响激光输出的频率和强度。
外部光调制通常包括以下几个步骤:1.外部光束输入:将外部光束输入到调制器中,通常使用电光调制器或声光调制器。
2.强度调制:通过电场或声学波来调制光强,改变调制器中的折射率。
3.光束传输:将调制后的光束传输到半导体激光器中。
4.激光器响应:半导体激光器对调制后的光束作出响应,输出相应的频率和强度。
利用Optisystem进行仿真计算1. 创建仿真模型首先,我们需要使用Optisystem创建一个仿真模型。
打开Optisystem软件,选择“New Project”创建一个新的项目。
然后,在“Components”窗口中选择半导体激光器和调制器等光学元件,将其拖拽到主画布上创建仿真模型。
双击元件可以对其进行参数设置。
2. 设置光学元件参数针对半导体激光器和调制器等光学元件,我们需要设置其参数。
例如,可以设置激光器的工作波长、增益、损耗等参数,调制器的调制速度和调制深度等参数。
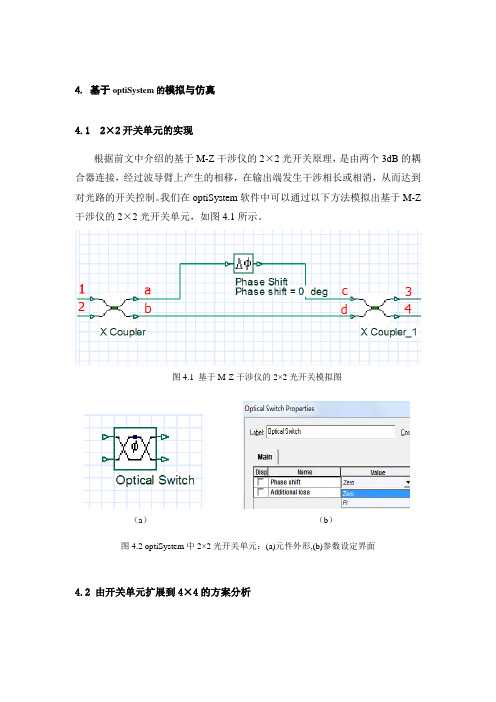
4. 基于optiSystem的模拟与仿真4.1 2×2开关单元的实现根据前文中介绍的基于M-Z干涉仪的2×2光开关原理,是由两个3dB的耦合器连接,经过波导臂上产生的相移,在输出端发生干涉相长或相消,从而达到对光路的开关控制。
我们在optiSystem软件中可以通过以下方法模拟出基于M-Z 干涉仪的2×2光开关单元,如图4.1所示。
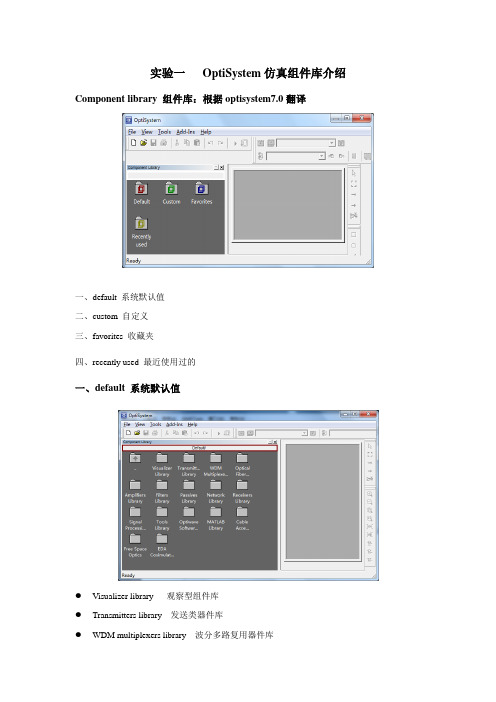
图4.1基于M-Z干涉仪的2×2光开关模拟图(a)(b)图4.2 optiSystem中2×2光开关单元:(a)元件外形,(b)参数设定界面4.2 由开关单元扩展到4×4的方案分析4.2.1 Banyan方案相比于Crossbar开关结构Banyan结构所使用的开关单元数量大大减少了。
虽然Banyan结构是可重排无阻塞的,但是考虑到功耗,需要的开关单元数量等问题,这种结构还是比其他结构优秀许多。
Banyan网络采用2×2交换单元,它有两种连接状态:平行连接和交叉连接,如图3.6所示。
平行连接时。
入端0和出端0’连接,人端l和出端1’连接;交叉连接时,入端0和出端1’连接,人靖1和出端0’连接。
Banyan网络的构造是非常规则的:4个2×2的交换单元连接起来,可以得到一个4个人端、4个出端的二级网络;12个这样的交换单元连接起来可以得到一个8个人端、8个出端的三级网络i 32个交换单元连接起来可以构成一个l6个人端、l6个出靖的四级网络。
(1)平行连接(2)交夏连接图4.3 Banyan网络的两种连接状态Banyan的构成具有一定的规律,可以采用有规则的扩展方法将较小容量的Banyan扩展成较大规模。
已有N×N的Banyan网络,需构成2N×2N的Banyan 网络,则可用2组N×N,再加上一组N个2×2交换单元构成。
第一组的N×N的N条出线分别与N个2×2交换单元的某一入线相连,第二组的N×N的N 条出线分别与N个2×2交换单元的另一入线相连。
实验一OptiSystem仿真组件库介绍Component library 组件库:根据optisystem7.0翻译一、default 系统默认值二、custom 自定义三、favorites 收藏夹四、recently used 最近使用过的一、default 系统默认值●Visualizer library 观察型组件库●Transmitters library 发送类器件库●WDM multiplexers library 波分多路复用器件库●Optical fibers library 光纤器件库●Amplifiers library 放大器组件库●Filters library 滤波器器件库●Passives library 无源器件库●Network library 网状器件库●Receivers library 接收端器件库●Signal processing library 信号处理器件库●Tools library 工具类器件库●Optiwave software tools 光波类软件库●Matlab library Matlab组件库●Cable access library 有线接收器件库●Free space optics 自由空间光●EDA cosimulation library 电子设计自动化仿真组件库(1)Visualizer library观察型组件库Optical 光学类Test sets:Optical filter analyzer 光学滤波式分析器(测试设备)Photonic all-parameter analyzer 光电子全参量分析器Differential mode delay analyzer 差模延迟分析器Optical spectrum analyzer 光谱仪Optical time domain visualizer 光时域观察仪Optical power meter 光功率计WDM analyzer 波分复用分析仪Dual port WDM analyzer 双端口波分复用分析仪Polarization analyzer 检偏振器Polarization meter 偏振仪表Spatial visualizer 空间立体观察器Encircled flux analyzer 环型通量分析仪Electrical 电学类Test sets:Electrical filter analyzer 电子类滤波器分析S parameter extractor S参量提取器Oscilloscops visualizer 示波器RF spectrum analyzer 射频频谱分析仪Eye diagram analyzer 眼图BER analyzer 误码率分析仪Electrical power meter visualizer 功率表Electrical constellation visualizer 万用表Electrical carrier analyzer 载波分析(2) Transmitters library 发送机组件Optical sources光源CW laser 连续波激光器Laser rate equations 速率方程Laser measured 激光测量LED 发光二极管White light source 白光Pump laser 激光泵浦Pump laser array 激光泵浦阵列CW laser array 连续激光阵列CW laser measured 连续波激光测量Directly modulated laser measured 调制激光直接测量CW laser array ES 连续波激光回声探测VCSEL laser 垂直端面发射激光器Controlled pump laser 可控泵浦激光Spatial CW laser 空间连续波激光器Spatial laser rate equations 空间激光速率方程组Spatial LED 空间发光二级管Spatial VCSEL 空间垂直端面发射激光器Spatiotemporal VCSEL 空域/时域垂直端面发射激光器Bit sequence generators 码元产生器Pseudo-random bit sequence generator 伪随机码发生器User defined bit sequence generator 用户自定义码发生器Pulse generators 脉冲发生器Electrical : RZ pulse generator 归零脉冲发生器NRZ pulse generator 非归零脉冲发生器Gaussian pulse generator 高斯脉冲发生器Hyperbolic-secant pulse generator 双曲正割脉冲发生器Sine generator 正弦波产生器Triangle pulse generator 三角脉冲产生器Saw-up pulse generator 上升锯齿波产生器Saw-down pulse generator 下降锯齿波产生器Impulse generator 脉冲产生器Raised cosine pulse generator 升余弦脉冲Sine pulse generator 正弦脉冲Measured pulse 测量脉冲Measured pulse sequence 测量脉冲组Bias generator 电流偏差产生器Duobinary pulse generator 二进制脉冲产生器Electrical jitter 电抖动Noise source 噪声源Predistortion 预失真、预矫正M-ary pulse generator M进制脉冲发生器M-ary raised cosine pulse generator M进制升余弦脉冲发生器Optical: Optical Gaussian pulse generator 高斯光脉冲产生器Optical sech pulse generator 双曲正割光脉冲产生器Optical impulse generator 光测量脉冲发生器Measured optical pulse 测量脉冲Measured optical pulse sequence 测量光脉冲组TRC measurement date TRC测量数据Spatial optical gaussian pulse generator 高斯空间光脉冲产生器Spatial optical impulse generator 空间光脉冲产生器Spatial optical sech pulse generator 双曲正割空间光脉冲产生器Optical modulators 光调制器Mach-zehnder modulator M-Z调制器Electroabsorption modulator 电吸收调制器Amplitude modulator 调幅Phase modulator 调相Frequency modulator 调频Dual drive Mach-zehnder modulator measured 双驱动M-Z调制器Electroabsorption modulator measured 电吸收调制器Single drive Mach-zehnder modulator measured 单驱动M-Z调制器Dual port dual drive Mach-zehnder modulator measured 双端口双驱动M-Z调制器LiNb Mach-zehnder modulator LiNb M-Z调制器Optical transmitters 光发送机WDM transmitter 波分复用光发送机Spatial optical transmitter 空间光发送机Optical transmitter 光发送机Multimode 多模Multimode generator 多模产生器Laguerre transverse mode generator 拉盖尔横模产生器Donut transverse mode generator 环行横模产生器Measured transverse mode generator 可调横模产生器(3) WDM multiplexers library WDM多路复用器Add and drop 分插复用WDM add 合复用器WDM drop 分复用器WDM add and drop 分插复用器Demultiplexers 解复用器WDM demux 1x2 1x2解复用器WDM demux 1x4 1x4解复用器WDM demux 1x8 1x8解复用器WDM demux WDM解复用器Ideal demux 理想解复用器WDM demux ES 额外区段波分复用器WDM interleaver demux 交错波分复用器Multiplexers 复用器WDM mux 2x1 2x1复用器WDM mux 4x1 4x1复用器WDM mux 8x1 8x1复用器WDM mux 复用器Ideal mux 理想复用器WDM mux ES 额外波段复用器Nx1 mux bidirectional Nx1双向复用器AWG 阵列波导光栅AWG NxN NxN阵列波导光栅AWG NxN bidirectional NxN双向阵列波导光栅(4) Optical fibers library 光纤组件Multimode:linear multimode fiber 线性多模光纤Measured-index multimode fiber 指数多模光纤Parabolic-index multimode fiber 抛物线形多模光纤Optical fiber 光纤Optical fiber CWDM 稀疏波分复用光纤Bidirectional optical fiber 双向光纤(5) Amplifiers library 放大器件OpticalEDFA: Erbium doped fiber 掺饵光纤EDFA 掺饵光纤放大器EDFA black box EDFA黑盒子Optical amplifier 光放大器EDFA measured 基于标准的掺饵放大器EDF dynamic 可移动掺饵光纤EDF dynamic analytical 动态分析Er-Yb codoped fiber 铒-镱混合掺杂光纤Yb doped fiber 掺镱光纤Yb doped fiber dynamic 可移动掺镱光纤Er-Yb codoped fiber dynamic 可动铒-镱混合掺杂光纤Ranam : Raman amplifier average power model 拉曼平均功率放大器Raman amplifier dynamic model 拉曼放大器动态模型SOA:Traveling wave SOA 行波半导体光放大器Wideband traveling wave SOA 宽频行波半导体光放大器Reflective SOA 反射式半导体光放大器Waveguide amplifier: Er Yb codoped waveguide 铒-镱混合掺杂波导ElectricalElectrical amplifier 电放大器Transimpedance amplifier 互阻抗放大器Limiting amplifier 限幅放大器AGC amplifier 自动增益控制放大器(6) Filters libraryOpticalFBG: Fiber bragg grating 光纤布拉格光栅Uniform fiber bragg grating 均匀布拉格光栅Ideal dispersion compensation FBG 理想色散补偿布拉格光栅Optical IIR filter 无限脉冲响应滤波器Measured optical filter 测量滤波器Rectangle optical filter 矩形滤波器Trapezoidal optical filter 梯形滤波器Gaussian optical filter 高斯滤波器Butterworth optical filter 巴特沃斯滤波器Bessel optical filter 贝塞尔滤波器Fabry perot optical filter F-P滤波器Acousto optical filter 声光滤波器Mach Zehnder interferometer 马赫曾德尔干涉仪Inverted optical IIR filter 反相光IIR滤波器Inverted rectangle optical filter 反相矩形滤波器Inverted trapezoidal optical filter 反相梯形滤波器Inverted Gaussian optical filter 反相高斯滤波器Inverted buttertworth optical filter 反相巴特沃斯滤波器Inverted Bessel optical filter 反相贝塞尔滤波器Gain flattening filter增益平坦滤波器Delay interferometer 延时干涉仪Periodic optical filter 周期性光滤波器Measured group delay optical filter 群延时测量光滤波器3 port filter bidirectional 3端口双向滤波器Reflective filter bidirectional 反射双向式滤波器Transmission filter bidirectional 透射双向式滤波器ElectricalIIR filterLow pass rectangle filter 低通矩形滤波器Low pass gaussian filter 低通高斯滤波器Low pass butterworth filter 低通巴特沃斯滤波器Low pass Bessel filter 低通贝塞尔滤波器Low pass chebyshev filter 低通切比雪夫滤波器Low pass RC filter 低通阻容滤波器Low pass raised cosine filter 低通升余弦滤波器Low pass cosine roll off filter 低通余弦滚降滤波器Low pass squared cosine roll off filter 低通余弦平方滚降滤波器Measured filter 标准滤波器Band pass rectangle filter 带通矩形滤波器Band pass Gaussian filter 带通高斯滤波器Band pass butterworth filter 带通巴特沃斯滤波器Band pass Bessel filter 带通贝塞尔滤波器Band pass chebyshev filter 带通切比雪夫滤波器Band pass RC filter 带通阻容滤波器Band pass raised cosine filter 带通升余弦滤波器Band pass cosine roll off filter 带通余弦滚降滤波器Band pass squared cosine roll off filter 带通余弦平方滚降滤波器S parameters measured filter S参量测量滤波器(7) Passives library 无源器件库OpticalAttenuators:Optical attenuator 光衰减器Attenuator bidirectional 双向衰减器Couplers:X coupler X型耦合器Pump coupler co-propagating 混合传播泵浦耦合器Pump coupler counter-propagating 相向传播泵浦耦合器Coupler bidirectional 双向耦合器Pump coupler bidirectional 双向泵浦耦合器Power combiners:Power combiner 2x1 2x1功率合成器Power combiner 4x1 4x1功率合成器Power combiner 8x1 8x1功率合成器Power combiner 功率合成器Polarization:Linear polarizer 线偏振片Circular polarizer 圆偏振片Polarization attenuator 偏振衰减器Polarization combiner 偏振合波器Polarization controller 偏振控制器Polarization rotator 偏振转子Polarization splitter 偏振光分路器PMD emulator 偏振模色散仿真器Polarization delay 偏振延迟Polarization phase shift 偏振相移Polarization waveplate 半波片Polarization combiner bidirectional 双向偏振合路器Isolators: Isolator 隔离器Ideal isolator 理想隔离器Isolator bidirectional 双向隔离器Circulators: Circulator 循环器Ideal circulator 理想循环器Circulator bidirectional 双向循环器Connectors: Connector 连接器Connector bidirectional 双向连接器Spatial connector 空间连接器Reflectors: Reflector bidirectional 双向反射器Taps: Tap bidirectional 双向Measured components: Measured component 测量组件Luna technologies OV A measurementMultimode: Spatial aperture 孔径(多模)Thin lens 薄透镜V ortex lens 漩涡透镜Phase shift 相移Time delay 延时ElectricalAttenuators: Electrical attenuator 衰减器Couplers: 90 degree hybrid coupler 90°混合耦合器180 degree hybrid coupler 180°混合耦合器DC blockers: DC block 隔直器Splitters: Splitters 1x2 1x2分离器Splitters 1xN 1x2分离器Combiners: Combiners 2x1 2x1组合器Combiners Nx1 Nx1组合器Measured components: 1 port S parameters 1端口参量2 port S parameters 2端口参量3 port S parameters 3端口参量4 port S parameters 4端口参量Electrical signal time delay 电信号延时Electrical phase shift 电信号相移(8) Network library 网状器件库Frequency conversion 变频Ideal frequency converter 理想变频Optical switches 光开关Optical swich 光开关Digital optical swich 数字光开关Optical Y swich Y型光开关Optical Y select Y型光选择开关Ideal switch 2x2 2x2理想开关Ideal Y switch 理想Y型开关Ideal Y select 理想Y型选择开关Ideal Y switch 1x4 理想1x4Y开关Ideal Y select 4x1 理想4x1Y选择Ideal Y switch 1x8 理想1x8Y选择Ideal Y select 8x1 理想8x1Y选择Ideal Y select Nx1 理想Nx1Y选择Ideal Y switch 1xN 理想1xNY开关Dynamic Y select Nx1 measured 动态Y选择Nx1 Dynamic Y switch 1xN measured 动态Y开关1xNDynamic Y switch 1xN 动态Y开关1xN Dynamic Y select Nx1 动态Y选择Nx1 Dynamic space switch matrix NxM measured NxM动态空间矩阵测量开关Dynamic space switch matrix NxM NxM动态空间矩阵开关2x2 switch bidirectional 双向2x2开关(9) Receivers library 接收端器件库Regenerators 热交流器Clock recovery 时钟恢复Ideal frequency demodulator 理想频率解调Ideal phase demodulator 理想相位解调Data recovery 数据恢复3R regenerator 3R再生器Electronic equalizer 电子均衡器MLSE equalizer 最大似然估计值均衡器Integrate and dump 积分陡落Photodetectors 光电探测器Photodetector PIN PIN光电探测器Photodetector APD APD光电探测器Spatial PIN photodetector 空间PIN光电探测器Spatial APD photodetector 空间APD光电探测器Optical receivers 光接收机Spatial optical receiver 空间光接收机Optical receiver 光接收机Multimode 多模Mode combiner 模式合路器Mode selector 模式选择器( 10) Signal processing library 信号处理组件库Arithmetic 算法Optical: Optical gain 光增益Optical adder 加法器Optical subtractor 减法器Optical bias 光偏置Optical multiplier 乘法器Optical hard limiter 硬限幅器Electrical: Electrical gain 电增益Electrical adder 加法器Electrical substractor 减法器Electrical multiplier 乘法器Electrical bias 偏置Electrical norm 模方Electrical differentiator 微分Electrical integrator 积分Electrical rescale 缩放Electrical reciprocal 倒数Electrical abs 绝对值Electrical sgn 符号函数ToolsOptical: Merge optical signal bands 合并信号带Convert to parameterized 参数化Convert to noise binsConvert to optical individual samples 转到小样本Convert from optical individual samples 从小样本转化Optical downsampler 降低取样频率取样器Signal type selector 信号类型选择器Channel attacher 频道连接Convert to sampled signals 抽样信号转化Logic 逻辑运算Electrical: Electrical NOT 非Electrical AND 与Electrical OR 或Electrical XOR 异或Electrical NAND 与非Electrical NOR 或非Electrical XNOR 同或Binary: Binary NOT 二进制非Binary AND 二进制与Binary OR 二进制或Binary XOR二进制异或Binary NAND二进制与非Binary NOR 二进制或非Binary XNOR二进制同或Delay 延时Duobinary precoder 双二进制预编码器4-DPSK precoder 四进制DPSK预编码器(11) Tools library 工具库Fork 1x2 1x2分路器Loop control 循环控制Ground 接地Buffer selector 缓冲选择Fork 1xN 1xN分路器Binary null 无效二进制Optical null 无效光Electrical null 无效电Binary delay 二进制延时Optical delay 光延时Electrical delay 电延Optical ring controller 光环型控制器Duplicator 复制器Save to file 保存到文件夹Load from file 从文件夹打开Switch 开关Select 选择Limiter 限幅器Intializer 初始化Electrical ring controller 电环形控制器Command line application 命令行应用Swap horiz 水平交换(12) Optiwave software tools 光软件工具OptiAmplifier 光放大器OptiGrating 光栅WDM phasar demux 1xN 1xN WDM移相解复用器WDM phase mux Nx1 1xN WDM移相复用器OptiBPM component NxM NxM 光束传播组件库Save transverse mode 保存横模(13) MATLAB library Matlab组件库ElectricalMATLAB filter 滤波器OpticalMATLAB optical filter 光滤波器MATLAB component 组件(14) Cable access library 有线接收组件库Carrier generators 载波发生器Carrier generator 载波发生器Carrier generator measured 测量用载波发生器Transmitters 发送机Modulators:Electrical amplitude modulator 调幅Electrical frequency modulator 调频Electrical phase modulator 调相Electrical PAM modulator 脉冲幅度调制Electrical QAM modulator 正交幅度调Electrical PSK modulator PSK调制Electrical DPSK modulator DPSK调制lectrical FSK modulator FSK调制Electrical CPFSK modulator 连续相位频移键控调制Electrical OQPSK modulator 偏移四相相移键控Electrical MSK modulator 最小频移键控调制Quadrature modulator 正交调制Pulse generators:PAM pulse generator PAM脉冲调制QAM pulse generator QAM脉冲调制PSK pulse generator PSK脉冲调制DPSK pulse generator DPSK脉冲调制OQPSK pulse generator OQPSK脉冲调制MSK pulse generator MSK脉冲产生器Sequence generators:PAM sequence generators PAM码产生器QAM sequence generators QAM码产生器PSK sequence generators PSK码产生器DPSK sequence generators DPSK码产生器Receivers 接收器件Demodulators:Electrical amplitude demodulator 幅度解调Electrical phase demodulator 相位解调Electrical frequency demodulator 频率解调Quadrature demodulator 正交解调Decoders:PAM sequence decoder PAM译码器QAM sequence decoder QAM译码器PSK sequence decoder PSK码译码器DPSK sequence decoder DPSK译码器Detectors: M-ary threshold detectors M进制阈值检测器(15) Free space optics 空间光FSO channel 自由空间光通信OWC channel 单向通道(16) EDA cosimulation library 电子设计自动化仿真组件库Load ADS file从文件夹打开ADS Save ADS file 保存ADS到文件夹Load spice CSDF file 打开CSDF Save spice stimulus file 保存少许激励到文件夹Triggered load spice CSDF file 触发Triggered save spice stimulus file 触发。
OptiSystem 仿真实例目录1光发送机(Optical Transmitters)设计1.1光发送机简介1.2光发送机设计模型案例:铌酸锂(LiNbO3)型Mach-Zehnder调制器的啁啾(Chirp)分析2光接收机(Optical Receivers)设计2.1光接收机简介2.2光接收机设计模型案例:PIN光电二极管的噪声分析3光纤(Optical Fiber)系统设计3.1光纤简介3.2光纤设计模型案例:自相位调制(SPM)导致脉冲展宽分析4光放大器(Optical Amplifiers)设计4.1光放大器简介4.2光放大器设计模型案例:EDFA的增益优化5光波分复用系统(WDM Systems)设计5.1光波分复用系统简介5.2光波分复用系统使用OptiSystem设计模型案例:阵列波导光栅波分复用器(AWG )的设计分析6光波系统(Lightwave Systems)设计光波系统简介光波系统使用OptiSystem设计模型案例:40G单模光纤的单信道传输系统设计7色散补偿(Dispersion Compensation)设计色散简介色散补偿模型设计案例:使用理想色散补偿元件的色散补偿分析8孤子和孤子系统(Soliton Systems)孤子和孤子系统简介孤子系统模型设计案例:9结语1 光发送机(Optical Transmitters)设计光发送机简介一个基本的光通讯系统主要由三个部分构成,如下图所示:作为一个完整的光通讯系统,光发送机是它的一个重要组成部分,它的作用是将电信号转变为光信号,并有效地把光信号送入传输光纤。
光发送机的核心是光源及其驱动电路。
现在广泛应用的有两种半导体光源:发光二级管(LED)和激光二级管(LD)。
其中LED输出的是非相干光,频谱宽,入纤功率小,调制速率低;而LD是相干光输出,频谱窄,入纤功率大、调制速率高。
前者适宜于短距离低速系统,后者适宜于长距离高速系统。

光纤通信大作业1.选择一个你认为合适的方案供选方案:NRZ、RZ调制格式,直接调制或者外调制,APD管或者PIN管,low pass rectangular filter或者low pass gauss filter。
请选择你认为实际中可实现的通信性能最好的一组方案。
并给出相应的理由。
答:选择NRZ调制格式,直接调制,APD管,low pass gauss filter。
选择这个方案的理由是:为了使得整个系统得到最好的信噪比,并且保证系统误码率在可接受的范围内。
具体理由分析如下:选择NRZ调制格式,因为经NRZ调制的光信号具有紧凑的频谱特性,调制和调解结构简单,在10G和一部分40G系统中得到广泛应用,一直被作为中短距离光纤通信系统中的主要调制格式,通过色散管理和终端可调色散补偿技术,NRZ调制格式在终端传输距离普通光纤获得良好的光传输性能。
选择直接调制,因为直接强度调制是用信号直接调制激光器的驱动电流,使其输出功率随信号变化.这种方式设备相对简单,研究较早,现已成熟并商品化.外调制则常用于要求较高的通信系统。
选择APD管,因为由书上的P264页的图8.3可知,PIN管接收灵敏度适用于低数据速率光纤通信,当系统通信数据速率为10G时,PIN灵敏度管不适于应用,我们优选ADP管。
选择low pass gauss filter(低通高斯响应滤波器),因为low pass rectangular filter(低通矩形响应滤波器)是理想的低通滤波器的模型,在幅频特性曲线上呈现矩形。
在现实中,如此理想的特性是无法实现的,所有的设计只不过是力图逼近矩形滤波器的特性而已。
而low pass gauss filter(低通高斯响应滤波器)采用时域法测量有效带宽,具有直观、简便的优点,而采用时域法能够显著缩短有效带宽测量时间。
实验过程:本次实验中,由NRZ调制格式、直接调制、APD管和low pass gauss filter构成的光纤通信系统。

光纤通信Zemax、optisystem实验程佑梁实验一 Zemax仿真设计实验目的1.熟悉Zemax实验环境,练习使用元件库中的常用元件组建光学系统。
2.利用Zeamx的优化功能设计光学系统并使其系统的各项性能参数达到最优.实验原理启用Zemax,如何键入wavelength,lens data,产生ray fan,OPD,spot diagrams,定义thickness solve以及variables,执行简单光学设计最佳化,即分为以下两个部分。
1、lens data editor首先叫出ZEMAX的lens data editor(LDE),什么是LDE呢?它是你要的工作场所,譬如你决定要用何种镜片,几个镜片,镜片的radius,thickness,大小,位置……等。
然后选取你要的光,在主选单system下,圈出wavelengths,依喜好键入你要的波长,同时可选用不同的波长等。
现在在第一列键入0.486,以microns为单位,此为氢原子的F-line光谱。
在第二、三列键入0。
587及0.656,然后在primary wavelength上点在0。
486的位置,primary wavelength主要是用来计算光学系统在近轴光学近似(paraxial optics,即first—order optics)下的几个主要参数,如focal length,magnification,pupil sizes等。
再来我们要决定透镜的孔径有多大。
既然指定要F/4的透镜,所谓的F/#是什么呢?F/#就是光由无限远入射所形成的effective focal length F跟paraxial entrance pupil的直径的比值.所以现在我们需要的aperture就是100/4=25(mm)。
于是从system menu上选general data,在aper value上键入25,而aperture type被default为Entrance Pupil diameter。

基于OptiSystem 7.0低反射率光栅准分布式传感系统的仿真分析谢晓鹏布拉格光纤光栅有其内在的优势,主要的电磁干扰小,高敏性,体积小,尤其可以大量复用。
1光纤光栅传感器已经在结构传感和嵌入式传感器对温度和应变测量上应用。
光纤光栅传感器是一个强大的种类,带给监测系统很多优势。
与传统的电传感器相比,,作为应变和温度传感器小型廉价轻便等优势2。
在实际中,光纤光栅传感器各种解调技术都相应发展,其中波分复用(WDM),时分复用(TDM)、空分复用(SDM)和多种复用结合,发展已经趋近成熟。
在WDM中,不同中心波长的光栅串接在一根光栅上,由于激光器输出带宽有限和光栅波长波动范围,使其复用个数很少,通常只有十多个。
而在TDM、SDM和多种结合的情况下,虽然都可通过增加系统复杂性来增加可复用光栅个数,但其解调和费用也相应的增加。
低反射布拉格光栅拥有光栅的以上优势,且最大的优势在栅间串扰小,可实现光栅的大量复用。
本系统利用的是串接在单模光纤上低反射率、中心波长的相同光栅。
所刻光栅其反射率约为6%,中心波长为1550nm,其理论复用个数可达9个,并且随着反射率的降低,其复用个数会增加,尤其在反射率为0.01%时,可复用的个数可达1000以上。
在仿真中用脉冲产生器,产生一系列不同中心波长连续的脉冲光,通过改变光栅的中心波长,来观测光谱图和计算光栅性能.OptiSystem是一款创新的光通讯系统模拟软件包,它集设计、测试和优化各种类型宽带光网络物理层的虚拟光连接等功能于一身,从长距离通讯系统到LANS和MANS都使用。
一个基于实际光纤通讯系统模型的系统级模拟器,OptiSystem具有强大的模拟环境和真实的器件和系统的分级定义。
它的性能可以通过附加的用户器件库和完整的界面进行扩展,而成为一系列广泛使用的工具。
全面的图形用户界面控制光子器件设计、器件模型和演示。
巨大的有源和无源器件的库包括实际的、波长相关的参数。
参数的扫描和优化允许用户研究特定的器件技术参数对系统性能的影响。
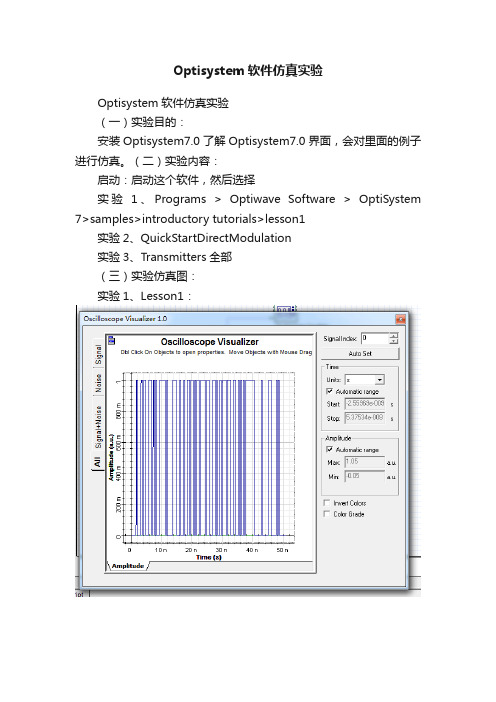
Optisystem软件Lesson1:实验目的:本课介绍如何创建一个发射器使用外部调制激光器。
您将熟悉组件库,主要布局,组件参数和展示台。
实验步骤:启动:启动这个软件,然后选择Programs > Optiwave Software > OptiSystem 3.0 >OptiSystem 3.0.Project layout:在主要运行区可以插入需要的元素,并且建立连接如下图Description:状态栏:在这里可以得到关于使用这个软件的有用的提示,它位于Project layou窗口的下方。
菜单栏:包含了这个软件可用的菜单。
使用元件库:在主菜单中选文件->新建出来一个空的Main Layout窗口。
从Component Library选择Default > Transmitters Library > Optical Sources把CW laser拖进窗口,如图:从Component Library选Default > Transmitters > 把Mach-Zehnder Modulator拖进Main layou自动连接设置:1、要取消自动连接,在Layout Operations工具栏里点击Auto Connect on Drop和Auto Connect on Move按钮。
如图:2、要开启自动连接:在Layout Operations工具栏中点击Auto Connect on Drop按钮和Auto Connect on Move按钮,按钮变成如下图所示的:手动连接元件:1、把光标放在第一个元件上,指针变成链状2、把指针拖到要连接的元件上即可。
操作:a .把Pseudo-Random Bit Sequence Generator的输出端口和NRZ Pulse Generator Bit Sequence的输入端口连接。
如图:b.把NRZ Pulse Generator的输出端口和Mach- Zehnder Modulator的输入端口连接。
OptiSystem 仿真实例目录1光发送机(Optical Transmitters)设计1.1光发送机简介1.2光发送机设计模型案例:铌酸锂(LiNbO3)型Mach-Zehnder调制器的啁啾(Chirp)分析2光接收机(Optical Receivers)设计2.1光接收机简介2.2光接收机设计模型案例:PIN光电二极管的噪声分析3光纤(Optical Fiber)系统设计3.1光纤简介3.2光纤设计模型案例:自相位调制(SPM)导致脉冲展宽分析4光放大器(Optical Amplifiers)设计4.1光放大器简介4.2光放大器设计模型案例:EDFA的增益优化5光波分复用系统(WDM Systems)设计5.1光波分复用系统简介5.2光波分复用系统使用OptiSystem设计模型案例:阵列波导光栅波分复用器(AWG )的设计分析6光波系统(Lightwave Systems)设计6.1 光波系统简介6.2 光波系统使用OptiSystem设计模型案例:40G单模光纤的单信道传输系统设计7色散补偿(Dispersion Compensation)设计8.1 色散简介8.2 色散补偿模型设计案例:使用理想色散补偿元件的色散补偿分析8孤子和孤子系统(Soliton Systems)9.1 孤子和孤子系统简介9.2 孤子系统模型设计案例:9结语1 光发送机(Optical Transmitters )设计1.1 光发送机简介一个基本的光通讯系统主要由三个部分构成,如下图1.1所示:作为一个完整的光通讯系统,光发送机是它的一个重要组成部分,它的作用是将电信号转变为光信号,并有效地把光信号送入传输光纤。
光发送机的核心是光源及其驱动电路。
现在广泛应用的有两种半导体光源:发光二级管(LED )和激光二级管(LD )。
其中LED 输出的是非相干光,频谱宽,入纤功率小,调制速率低;而LD 是相干光输出,频谱窄,入纤功率大、调制速率高。
前者适宜于短距离低速系统,后者适宜于长距离高速系统。
一般光发送机由以下三个部分组成:1) 光源(Optical Source ):一般为LED 和LD 。
2) 脉冲驱动电路(Electrical Pulse Generator ):提供数字量或模拟量的电信号。
3) 光调制器(Optical Modulator ):将电信号(数字或模拟量)“加载”到光波上。
以光源和调制器的关系来看,可划分为光源的内调制和光源的外调制。
采用外调制器,让调制信息加到光源的直流输出上,可获得更好的调制特性、更好的调制速率。
目前常采用的外调制方法为晶体的电光、声光及磁光效应。
图1.2为一个基本的外调制激光发射机结构:在该结构中,光源为频率193.1Thz 的激光二极管,同时我们使用一个Pseudo-Random BitSequence Generator 模拟所需的数字信号序列,经过一个NRZ 脉冲发生器(None-Return-to-Zero Generator 转换为所需要的电脉冲信号,该信号通过一个Mach-Zehnder 调制器,通过电光图1.1 光通讯系统的基本构成 1)光发送机 2) 传输信道 3)光接收机 图2 外调制激光发射机效应加载到光波上,成为最后入纤所需的载有“信息”的光信号。
1.2光发送机模型设计案例:铌酸锂(LiNbO3)型Mach-Zehnder调制器中的啁啾(Chirp)分析1.2.1设计目的通过本设计实例,我们对铌酸锂Mach-Zehnder调制器中的外加电压和调制器输出信号的啁啾量的关系进行了模拟和分析,从而决定具体应用中MZ调制器的外置偏压的分布和大小。
1.2.2原理简介对于处于直接强度调制状态下的单纵模激光器,其载流子浓度的变化是随注入电流的变化而变化。
这样使有源区的折射率指数发生变化,从而导致激光器谐振腔的光通路长度相应变化,结果致使振荡波长随时间偏移,导致所谓的啁啾现象。
啁啾是高速光通讯系统中一个十分重要的物理量,因为它对整个系统的传输距离和传输质量都有关键的影响。
将脉冲传输时中心波长发生偏移的现象叫做“啁啾”。
例如在光纤通信中由于激光二极管本身不稳定而使传输单个脉冲时中心波长瞬时偏移的现象,也叫“啁啾”。
1.2.3模型的设计布局图外调制器由于激光光源处于窄带稳频模式,我们可以降低或者消除系统的啁啾量。
一个典型的外调制器是由铌酸锂(LiNO3)晶体构成。
本设计实例中,我们通过对该晶体外加电压的分析调整而最终减少该光发送机中的啁啾量,其模型的设计布局图如图1.3所示:图1.3 双驱动型LiNbO3 Mach-Zehnder调制激光发送机设计图1.2.4 模拟分析在图1.3中,驱动电路1的电压改变量ΔV1和驱动电路2的电压改变量ΔV2是相同的。
图1.4为MZ 调制器的参数设定窗口。
其中MZ 调制器以正交模式工作,外置偏压位于调制器光学响应曲线的中点,使偏压强度为其峰值的一半。
而消光系数设为200dB ,以避免任何由于不对称Y 型波导而导致的啁啾声。
对于双驱动调制器而言,两路的布局是完全一样的[3],所以这里可使用一个Fork 将信号复制增益(本例设有三次参数扫描过程中,V 2大小分别为V 1的-1,0,-3倍)后到MZ 调制器的另一个输入口。
啁啾(Chirp )量可根据两路的驱动偏压值得到,如公式1.1,其中V 1,V 2分别为两个驱动电路的驱动电压,α为啁啾系数:(1) V V 2121V V -+=α图1.5为一系列信号脉冲输入时,在2,3口的电压V 1= –V 2 = 2.0V 时波形。
根据公式1.1可知在这种情况下,啁啾系数α为0,而实际模拟出来的结果可见图1.6。
图1.4 LiNbO 3 Mach-Zehnder 调制器的参数设置图1.5 输入口2的电压为2.0V,输入口3的电压为-2.0V时的电压波形图1.6 V1=-V2=2.0V时,输出的光信号波形及其啁啾量(Chirp)此外,为了观察啁啾量随电压的改变情况,当设定外加偏压为V1= -3V2=3.0V时,根据公式1可得到α为0.5,输入口2,3和输出口的信号波形可参见图1.7,1.8:图1.7 当V1= -3V2=3.0V时,输入口2,3的电信号波形以上两次不同V1,V2外置偏压的情况下,OptiSystem提供了实际情况的模拟仿真,并可得到一系列结果:1 ) 当V1=-V2=2.0V时,如图1.6所示,其中的亮红线为光发射器的啁啾量,可得到其大小约为100Hz;相对于光源的频率,这个啁啾量在实际情况中可基本视为零。
2 ) 当V1=-3V2=3.0V时,如图1.8所示,啁啾量的大小约为3GHz,这个大小的啁啾量在实际情况中对输出光信号的灵敏度以及最终所能传输的距离都会有十分严重的影响,需要设计者避免和消除。
从本设计案例中,我们可以利用OptiSystem提供的元件和分析功能设计并得到关于LiNbO3 Mach-Zehnder调制器中的啁啾量大小随两路输入电压的变化关系,从而可在实际设计时针对一些参数进行设定和分析,以得到最佳的效果;更多关于Mach-Zehnder调制器的啁啾的分析可参见文献[1-3]。
2光接收机(Optical Receivers)设计2.1 光接收机简介在光纤通讯系统中,光接收机的任务是以最小的附加噪声及失真,恢复出由光纤传输后由光载波所携带的信息,因此光接收机的输出特性综合反映了整个光纤通讯系统的性能。
一般一个基本的光接收机有以下三个部分组成,可见图2.1:图2.1 光接收机的一般结构1)光检测器通常,接收到光脉冲所载的信号代表着0或者1的数位,利用光检测器,其转变为电信号。
目前广泛使用的光检测器是半导体光电二极管,主要有PIN管和雪崩光电二极管,后者又称APD管。
2)放大器包括前置放大器和主放大器,前者与光电检测器紧相连,故称前置放大器。
在一般的光纤通讯系统中,经光电检测器输出的光电流是十分微弱的,为了保证通信质量,显然,必须将这种微弱的电信号通过放大器进行放大。
在OptiSystem提供的Photodiode元件中已内置了前置放大器。
3)均衡器、滤波器需要均衡器、滤波器等其他电路装置对信号进行进一步的处理,消除放大器及其他部件(如光纤)等引起的波形失真,并使噪声及码间干扰减到最小。
接收机的噪声和接受机的带宽是成正比的,当使用带宽小于码率的的低通滤波器时,可以降低系统的噪声。
4)解调器为了使信码流能够并有利于在光纤系统中传输,光发射机输出的信号是经过编码处理的,为了使光接收机输出的信号能在PCM系统中传输,则需要将这些经编码处理的信号进行复原。
在该结构中,在已经内建了判决器和时钟恢复电路的误码率分析仪(BER Analyzer)中可以得到最终复原的信号,并可对最终的输出信号的误码率等各项参数进行检测、分析。
2.2光接收机模型设计案例:PIN光电二极管的噪声分析2.2.1 设计目的影响光接收机性能的主要因素就是接收机内的各种噪声源。
接收机中的放大器本身电阻会引入热噪声(Thermal Noise),而放大器的晶体管会引入散粒噪声(Shot Noise),而且多级放大器中会将前级的噪声同样放大,计算分析这些噪声对我们分析、优化光接收机以及整个光通讯系统都是有十分重要的作用。
2.2.2 原理简介噪声是一种随机性的起伏量,它表现为无规则的电磁场形式,是电信号中一种不需要的成分,干扰实际系统中信号的传输和处理,影响和限制了系统的性能。
在光接收机中,可能存在多种噪声源,它们的引入部位如图2.2所示。
●背景噪声●漏电流噪声图2.2 光接收机中的噪声源及其分布2.2.3 模型的设计布局图图2.3为PIN光电二极管噪声分析的OptiSystem设计布局图:图2.3 光电二极管的噪声分析的设计布局图图2.4 光电二极管的Shot Noise(上图)图2.5 光电二极管的Thermal Noise(下图)如图2.3所示,从外调制激光发送机输出的调制光信号,经衰减器后,由Fork复制为两路相同的信号分别送入不同噪声设置的光电二极管。
上端的PIN管不考虑热噪声,而具有Shot Noise;而下端的PIN管的热噪声为1.85e-25W/Hz,没有Shot Noise,然后分别送入滤波器和最终的误码率分析仪中,其中两路中的低通滤波器的截止频率和码率都是一样的。
在图2.4中,用户可以看到上端PIN管中Shot Noise是依赖于信号强度大小的。
而在图2.5中,下端的PIN管不计入Shot Noise,而只考虑热噪声;可以发现该噪声的大小也是依赖于信号强度的。
从本例中,我们可以观察到热噪声和散粒噪声对最终传输的信号质量的影响,并可以根据数据模拟有个定量的分析和计算。