基于神经网络的智能车控制(chinese)概要
- 格式:doc
- 大小:15.00 KB
- 文档页数:4
神经网络在智能控制系统中的应用智能控制系统是一种基于前沿技术的控制系统,它具备学习和适应能力,可以自主地做出决策并改进自身的性能。
在智能控制系统中,神经网络作为一种重要的技术手段,展示了出色的应用效果。
本文将介绍神经网络在智能控制系统中的应用,并探讨其优势和未来发展方向。
一、神经网络在智能控制系统中的基本原理神经网络是一种通过模仿生物神经系统来模拟人类智能行为的技术方法。
神经网络由大量的神经元相互联结而成,通过学习和训练,神经网络能够对输入信息进行处理和分析,并对未知的数据作出预测和决策。
在智能控制系统中,神经网络起到了关键的作用。
首先,它能够通过学习和训练来从大量的数据中提取有用的信息,并有效地进行模式识别和分类。
其次,神经网络能够建立起输入和输出之间的映射关系,从而实现对输入信号的动态处理和控制。
最后,神经网络还能够通过自适应学习的方式,主动调整自身的结构和参数,以适应不同的环境和任务需求。
二、神经网络在智能控制系统中的应用领域1.自动驾驶技术神经网络在自动驾驶技术中具有广泛的应用。
通过对实时传感器数据的处理和分析,神经网络能够实现车辆的环境感知、路径规划和行为决策,从而实现自主驾驶功能。
神经网络的高并行性和适应能力使得自动驾驶系统能够在复杂多变的交通环境中实现精确的控制和决策。
2.智能制造神经网络在智能制造领域中的应用也日益重要。
在生产线的控制与优化中,神经网络能够通过学习和模式识别来分析生产数据,探测异常和故障,并实现自动故障诊断和预防。
此外,神经网络还能够优化生产调度和质量控制,提高生产效率和产品质量。
3.智能家居随着物联网技术的发展,智能家居正逐渐成为人们生活的一部分。
神经网络在智能家居中扮演着智能控制的重要角色。
通过对家庭环境和用户行为的学习和建模,神经网络可以实现智能家居设备的自主控制和个性化服务。
它能够根据不同的需求和偏好,自动调节室内温度、照明和安全系统,提供便捷、舒适和安全的居家环境。

图神经网络(Graph Neural Network,GNN)是一种基于图结构的深度学习模型,它可以对图结构的数据进行学习和推断。
随着智能驾驶技术的快速发展,图神经网络在智能驾驶中的应用也备受关注。
本文将从几个方面探讨图神经网络在智能驾驶中的应用研究。
一、图神经网络在道路感知中的应用在智能驾驶中,道路感知是至关重要的一环。
图神经网络可以应用于道路感知中,通过对道路交通图的学习和推断,实现对车辆、行人、道路标识等的识别和预测。
利用图神经网络,可以更准确地理解道路交通图的拓扑结构和语义信息,提高道路感知的精度和鲁棒性。
二、图神经网络在路径规划中的应用路径规划是智能驾驶系统中的另一个关键环节。
传统的路径规划方法往往只考虑车辆与道路之间的关系,而忽略了道路网中的复杂拓扑结构和动态变化。
图神经网络可以应用于路径规划中,利用图结构的信息,更好地考虑道路网中的交通流量、道路条件、交叉口情况等因素,实现更智能、更高效的路径规划。
三、图神经网络在交通流预测中的应用交通流预测是智能交通系统中的重要问题,也是智能驾驶系统中的关键技术之一。
利用图神经网络,可以对道路网中的交通流进行建模和预测,实现对交通拥堵、交通事故等情况的智能识别和预测。
通过对交通流的预测,智能驾驶系统可以更好地规划出行路径,提高行车效率,减少交通拥堵和事故发生的概率。
四、图神经网络在车辆控制中的应用图神经网络还可以应用于车辆控制中,通过学习道路交通图的动态变化,实现对车辆行驶状态的智能监控和控制。
利用图神经网络,可以更好地理解道路交通图中车辆的行驶轨迹、速度、加速度等信息,实现智能的车辆控制和行车辅助,提高行车安全性和舒适性。
综上所述,图神经网络在智能驾驶中的应用研究具有重要意义。
通过对道路交通图的学习和推断,图神经网络可以实现对道路交通环境的深度理解和智能感知,为智能驾驶系统的发展提供强大的技术支持。
未来,随着图神经网络技术的不断进步和智能驾驶市场的不断拓展,图神经网络在智能驾驶中的应用前景将更加广阔。

车联网中基于神经网络的车辆行为分析系统设计与应用随着车联网技术的不断发展,未来的汽车将拥有越来越多的智能化和联网化功能。
而基于神经网络的车辆行为分析系统则成为了车联网技术中的一项重要应用。
通过对车辆行为进行实时分析,车辆行为分析系统可以提供更加安全、节能和舒适的驾驶体验,为车主和车辆制造商带来更多的好处。
1. 车辆行为分析系统的原理车辆行为分析系统通过收集车辆传感器、控制器、摄像头等数据,利用人工神经网络技术建立车辆行为模型,并对驾驶行为进行实时分析。
在系统设计中,车辆行为模型需要考虑到多种因素,如驾驶环境、车辆状态、道路情况等。
此外,为了提高模型的准确性和稳定性,需要对数据进行预处理和噪声过滤。
2. 神经网络在车辆行为分析系统中的应用神经网络作为一种强大的模式识别和数据挖掘工具,在车辆行为分析系统中得到了广泛应用。
目前主要采用的是前馈神经网络、卷积神经网络和循环神经网络等不同类型的神经网络模型。
前馈神经网络是最常见的一种神经网络模型,它具有简单易懂、训练速度快的特点,适合用于车辆行为的分类和预测。
卷积神经网络在图像识别和物体检测等领域已经得到了广泛应用,而在车辆行为分析系统中,它主要用于处理图像和视频数据。
循环神经网络则可以处理序列数据,如语音、文本和时序数据等,适用于车辆行为识别和预测。
3. 车辆行为分析系统的应用场景车辆行为分析系统可以广泛应用于驾驶安全、智能交通、车辆健康监测等领域。
在驾驶安全方面,车辆行为分析系统可以帮助驾驶员识别危险驾驶行为,如疲劳驾驶、打手机等,提高驾驶安全性。
在智能交通方面,车辆行为分析系统可以实现车辆跟车自动驾驶、智能控制等功能,提高车辆的行驶效率和安全性。
车辆行为分析系统还可以帮助车主监测车辆状态,提供即时的维修和保养建议,延长车辆的使用寿命。
4. 车辆行为分析系统的未来发展方向随着车联网技术的不断发展,车辆行为分析系统也将得到更加全面和精准的发展。
一方面,车辆行为分析系统将更加注重驾驶环境、车辆状态和驾驶人习惯等多方面的数据收集和分析。

神经网络在汽车控制系统中的应用研究一、引言汽车控制系统是现代汽车中至关重要的一部分,它负责控制和管理车辆的各种功能和行为,包括引擎控制、刹车系统、安全气囊等。
随着汽车技术的不断发展,神经网络作为一种强大的技术工具,被广泛应用于汽车控制系统中。
本文将探讨神经网络在汽车控制系统中的应用研究,详细介绍其原理、方法和优势。
二、神经网络的基本原理神经网络是一种模仿人类神经系统的计算模型,它由大量的神经元以及相互连接的权重和阈值组成。
通过训练和学习,神经网络能够自动地调整权重和阈值,从而实现输入与输出之间的映射关系。
神经网络的基本原理包括了感知器、反向传播算法、激活函数等。
三、神经网络在汽车控制系统中的应用1. 发动机控制:神经网络可以通过学习和训练,根据驾驶员的需求和当前的道路状况,自动调整发动机的工作参数,实现最佳的动力输出和燃油利用率。
2. 刹车系统:神经网络可以通过学习刹车系统的工作原理和车辆的运动状态,实时判断是否需要进行刹车,并调整刹车力度和时间,提高刹车的安全性和稳定性。
3. 转向系统:神经网络可以通过学习车辆的转向角度和路面的状况,自动调整转向系统的参数,保持车辆的稳定性和操控性。
4. 安全气囊:神经网络可以通过学习车辆的撞击力和碰撞部位,判断是否需要触发安全气囊,并根据撞击力的大小和碰撞部位的位置,自动调整安全气囊的充气程度,保护驾驶员和乘客的安全。
四、神经网络在汽车控制系统中的优势1. 自适应性:神经网络可以通过学习和训练,自动地调整参数和权重,适应不同驾驶条件和道路状况,提高汽车的性能和安全性。
2. 实时性:神经网络的计算速度快,能够在极短的时间内对输入数据进行处理和分析,实现实时的控制和反馈。
3. 鲁棒性:神经网络可以容忍输入数据的噪声和干扰,具有较强的鲁棒性和稳定性,能够在复杂的驾驶环境中正常工作。
4. 自学习能力:神经网络可以通过学习和训练,自动地提取特征和规律,不需要人为地定义规则和设置参数,减少了人工干预的成本和工作量。


基于神经网络的智能控制方法智能控制是近年来兴起的一种控制方法,它借助于神经网络的强大计算能力,能够对复杂的系统进行智能化的控制与决策。
本文将介绍基于神经网络的智能控制方法,并探讨其在实际应用中的潜力和优势。
一、神经网络简介神经网络是一种模拟人脑神经系统的计算模型,它由大量的神经元通过连接构成,能够对海量的信息进行高效的处理和学习。
神经网络具有自适应性、容错性和并行处理能力等特点,被广泛应用于图像识别、语音处理、自动驾驶等领域。
二、智能控制方法的基本原理基于神经网络的智能控制方法主要包括感知、决策和执行三个阶段。
感知阶段通过传感器采集系统的输入信号,并将其转化为神经网络可以处理的形式。
决策阶段利用训练好的神经网络对输入信号进行学习和判断,生成相应的控制策略。
执行阶段将控制策略转化为实际控制信号,通过执行器对系统进行控制。
三、基于神经网络的智能控制方法的优势1. 强大的学习能力:神经网络具有良好的自适应性和学习能力,能够通过大量的训练样本不断优化模型的参数,使之具备更好的控制性能。
2. 复杂系统的控制:神经网络可以对具有较高维度和非线性特性的复杂系统进行控制,能够应对更加复杂的实际场景和问题。
3. 实时性和适应性:神经网络能够在实时性要求较高的情况下对输入信号进行快速处理和决策,具备较强的适应性和反应能力。
4. 容错性和鲁棒性:神经网络在面对部分信息丢失或者噪声干扰时,仍能够保持较好的控制性能,具备较强的容错性和鲁棒性。
四、基于神经网络的智能控制方法的应用1. 智能交通系统:利用基于神经网络的智能控制方法,可以对交通流量进行实时监测和调度,达到优化交通流的效果,提高道路的通行能力和交通效率。
2. 工业自动化:神经网络可以应用于工业自动化领域中的生产线控制、设备故障预测等任务,提高生产效率和产品质量。
3. 智能机器人:通过神经网络实现智能机器人的导航、目标识别和路径规划等功能,使其具备更强的自主决策和执行能力。
神经网络技术在自动驾驶中的应用自动驾驶汽车是未来交通运输行业的发展方向,这需要采用先进的技术来实现。
神经网络技术具有良好的应用前景,它可以实现车辆的自动控制,在实时处理大量数据的同时,也可以对数据进行学习、优化,提高驾驶适应能力和安全性。
接下来,本文将围绕着神经网络技术在自动驾驶中的应用做一些探讨。
一、神经网络技术在自动驾驶中的应用神经网络是一种模拟人类神经系统的数学模型,它可以对复杂的数据进行处理和分析。
在自动驾驶领域中,神经网络技术可以用于处理传感器数据,反馈给车辆的控制系统,从而实现车辆的自主控制。
具体而言,神经网络技术可以应用于以下几个方面:1. 操作控制神经网络技术可以根据传感器采集的数据进行实时的车辆控制,这包括急转弯、换道、起停等操作。
通过对大量数据的学习和分析,神经网络可以对复杂的操作进行精准处理,并从中汲取经验,逐步改善自己的性能。
2. 交通规则在自动驾驶中,车辆必须要遵守交通规则,包括红绿灯、速度限制、交通标志等。
神经网络可以通过对各种交通规则的识别和分类,使车辆在一定程度上具备自主遵守交通规则的能力。
3. 中央控制系统神经网络技术可以在车辆的中央控制系统中发挥重要的作用。
它可以实现车辆的故障诊断、自我修复和优化,从而保证车辆的高效、稳定和安全运行。
二、神经网络技术的优势与传统的控制技术相比,神经网络技术有以下几个方面的优势:1. 自适应性当前的车辆控制技术需要事先安装好各种传感器来获取车辆周围的信息,但是神经网络技术可以通过对传感器采集的数据进行学习和分析,快速适应各种条件下的控制需求,实现自适应的控制。
2. 鲁棒性神经网络技术可以处理复杂的数据,同时对干扰和噪音有很强的容忍性,具有较强的鲁棒性。
这意味着即使在车辆运行过程中出现了一些异常情况,也不会对控制系统造成严重的影响。
3. 学习能力神经网络技术可以通过对大量数据的学习和分析,不断提高自己的性能,从而实现更精准、更准确的控制。

基于神经网络的智能控制与优化第一章:引言随着机器学习、深度学习、神经网络等技术的不断发展,人工智能逐渐走向实际应用,其中智能控制和优化技术在各个领域中得到了广泛应用。
基于神经网络的智能控制和优化技术是目前比较热门的研究方向之一,尤其是在制造业、交通运输、农业等领域中得到了广泛应用,本文针对该技术进行深入研究和探讨。
第二章:智能控制与优化概述智能控制和优化技术是指通过人工智能、计算智能等技术手段来实现对系统的控制和优化。
在日常生活、工业生产和其他领域应用中,智能控制和优化技术都是非常必要的。
它能够提高设备的自动化程度,提高生产效率、减少能源消耗、调整设备状况等。
智能控制和优化技术主要包括以下方面:(1)智能控制技术:智能控制是指通过模拟人的思维方式来完成对系统的控制和优化。
这种技术可以有效地将控制过程自动化,减少人为干预。
(2)神经网络控制技术:神经网络控制技术是指通过神经网络对系统进行建模和控制,提高系统的自适应、自学习和自适应能力。
(3)遗传算法控制技术:遗传算法是一种优化技术,它可以根据指定的目标函数对系统进行优化调整,寻找最优的参数组合或解决方案。
(4)模糊控制技术:模糊控制是指通过模糊逻辑推理来完成对系统的控制和优化,有效提高了控制精度和稳定性。
第三章:神经网络智能控制与优化的基本理论(1)神经网络模型理论:神经网络是由大量的人工神经元组成的网络,中间层神经元接收输入信息,通过加权处理和激活函数处理将信息输出给输出层,完成对输入信息的处理。
网络中权值的调整可以通过BP算法、RBF算法等。
(2)神经网络控制技术的原理及方法:神经网络控制是通过神经网络对物理系统进行建模,运用控制理论进行控制,在系统的动态过程中不断调整神经网络权值,使输出值接近期望值,实现对系统的智能化控制。
(3)神经网络控制的优点:1)能够适应各种非线性、大时滞、复杂系统的控制。
2)富有容错性和自适应性,能够处理系统的多样性和变化性,提高系统的可靠性和效率。
73科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 工 业 技 术汽车以有将近百年的发展,以成为人们生活不可或缺的交通工具,使人们出行变得方便,提高人们的生活质量。
但随着汽车技术的进步和人民物质水平的提高,道路上越来越多的汽车,交通越来越拥挤,驾驶员的非职业性等等。
使得交通事故频繁发生,造成巨大的人员伤亡和财产损失。
汽车交通安全已成为一个社会问题。
为了解决这个问题,首先,汽车必须有良好的安全。
一些功能的设计,主要研究方向之一是汽车的主动安全性是否良好。
汽车操纵稳定性的研究,已经有七十多年的历史。
目前,研究汽车本身的问题已经相当深入。
然而,人们使用智能汽车模型操纵稳定性评价时,有这样一个问题:缺乏基本了解对驾驶员的特性。
因此,人们只知道方向盘输入对应汽车的具体响应,很难确定驾驶员对系统的性能影响。
通过了解,一些研究人员开始研究驾驶员模型和驾驶员汽车闭环系统。
本文根据实践经验和方向控制驱动模型,研究基于智能车辆的需求和汽车操纵稳定性评价研究闭环驾驶模型。
基于车辆速度单神经元自适应PI D控制的驾驶员模型。
1 神经网络和PID控制1.1 PID 控制原理PID控制是最早的控制策略,比例、积分和微分组合控制,控制被控对象,称为P I D 控制器。
自从计算机进入控制领域以来,模拟控制器被数字计算机代替组成计算机控制系统,在软件上实现PI D控制算法,对PID控制使用更灵活,因其控制简单、可靠性高和鲁棒性好成为生产中常见的控制方法,过程控制和运动控制被广泛应用。
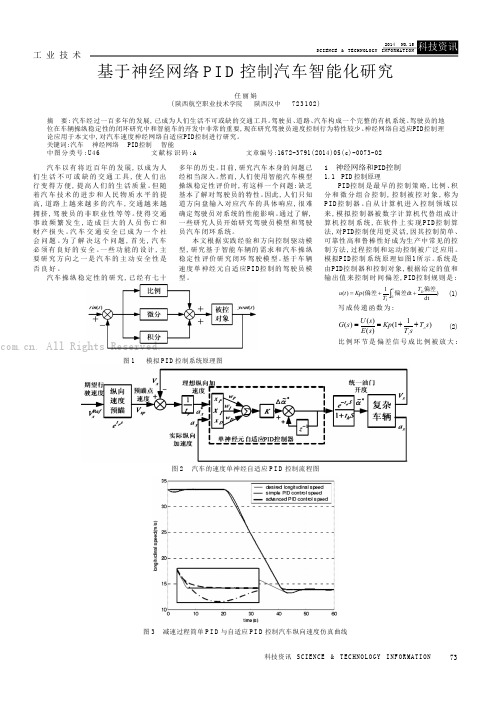
模拟PID控制系统原理如图1所示。
系统是由PID控制器和控制对象,根据给定的值和输出值来控制时间偏差,PID控制规则是:)dtdt 1()(t偏差偏差偏差D IT T Kp t u (1)写成传递函数为:)11()()()(s T sT Kp s E s U s G DI(2)比例环节是偏差信号成比例被放大;基于神经网络P I D 控制汽车智能化研究任丽娟(陕西航空职业技术学院 陕西汉中 723102)摘 要:汽车经过一百多年的发展,已成为人们生活不可或缺的交通工具。

基于神经网络技术的智能驾驶系统一、背景随着时代的发展和科技的不断进步,自动驾驶技术已经成为汽车行业的一个热点话题,并且越来越受到消费者的关注。
而其中最重要的技术之一就是神经网络技术。
智能驾驶系统(Intelligent Driving System)正是基于神经网络技术的一种高科技自动驾驶系统。
二、神经网络技术神经网络技术是一种仿生学模拟技术。
人工神经网络(Artificial Neural Network,简称ANN)是基于对自然神经网络的了解而发展起来的一种模拟神经系统的计算模型。
ANN能够通过训练,从大量的数据中学习到数据的规律和特征,从而达到识别、分类、预测等目的。
神经网络技术通过模拟人的大脑中的神经元之间的相互作用,利用相互连接的神经元来处理信息,实现了类似人类智能的决策和操作。
而在自动驾驶领域,神经网络技术被广泛运用,是实现智能驾驶系统的核心技术。
三、智能驾驶系统智能驾驶系统是指采用先进传感器、智能控制单元和自动控制算法等技术,在驾驶员的指导下,对车辆进行全方位监测和自主控制的系统。
智能驾驶系统的核心就是通过先进的传感器获取车辆周边的信息,然后借助智能控制单元和自动控制算法来实现自主控制。
智能驾驶系统通过神经网络技术的应用,可以使车辆能够不依赖驾驶员而进行驾驶,接近真正的自动驾驶程度。
同时,智能驾驶系统可以大大提高行驶安全性,减少交通事故的发生,加快交通流动,并减少对空气和环境的污染。
四、基于神经网络技术的智能驾驶系统智能驾驶系统的核心是自动控制算法,而基于神经网络技术的智能驾驶系统中,自动控制算法则是通过对大量实车实验数据的深度学习获得的。
简单来说,就是通过神经网络对各种数据进行处理和分析,从而学习出最佳的控制策略,实现车辆的自主控制。
基于神经网络技术的智能驾驶系统能够通过先进的传感器对周边环境进行感知,在行驶过程中结合地图和车辆动态信息进行路线规划、车道保持、障碍物避让等操作。
在速度、方向、加速度等多个方面都实现了自主控制。
基于神经网络智能交通的控制系统设计摘要:传统的交通控制系统在应对复杂、动态的交通流中显示出局限性,急需一种更加智能化的解决方案。
而神经网络技术作为人工智能领域的一个重要分支,以其出色的数据处理和模式识别能力,为创新交通控制系统提供了新的可能性。
通过利用神经网络对交通数据进行实时分析和预测,可以显著提高交通系统的响应速度和调控精度。
因此,本研究旨在设计一种基于神经网络的智能交通控制系统,以期提高交通效率,减少拥堵,优化城市交通流。
关键词:神经网络;智能交通系统;系统设计要素一、基础理论与技术(一)神经网络的基本原理神经网络的基本原理是模拟人脑中神经元的工作方式,以实现复杂的数据处理和模式识别功能。
基本的神经网络由大量的神经元(或称节点)组成,这些神经元在多层结构中相互连接,每个神经元可以接收来自前一层神经元的输入信号,对这些信号进行加权求和,并通过一个激活函数来决定是否以及如何将信号传递给下一层神经元。
神经网络的学习过程通常涉及调整神经元之间连接的权重,这个过程通常基于大量数据样本进行。
通过反复迭代,网络逐渐调整其内部结构,以更好地映射输入数据与期望输出之间的关系,这种学习过程类似于人类的学习过程,通过经验积累逐渐提高性能。
神经网络的强大之处在于其能够处理非线性关系,并能从复杂的数据中提取模式和特征,这使神经网络特别适用于各种复杂的预测和分类任务,如语音识别、图像处理和自然语言处理等领域。
在智能交通系统设计中,神经网络可以用于分析和预测交通流量,从而优化交通信号控制和减少拥堵。
(二)智能交通系统(ITS)的概念智能交通系统(ITS)是应用现代信息技术、数据通信传输技术、电子感知技术、控制技术和计算机技术于整个地面交通管理系统的一种综合解决方案,它旨在提高交通系统的效率、安全性和环境可持续性,通过减少交通拥堵,提升交通管理效率和行车安全,同时降低环境污染。
ITS的核心是集成和协调交通网络中的各种信息,实现对交通流的动态监控和实时管理,这包括但不限于交通信号控制、事故检测和响应、电子收费系统、交通流量监测、车辆导航、停车管理和公共交通系统管理。

神经网络控制:探讨神经网络控制在控制系统中的应用和实践引言我们生活在一个充满各种控制系统的时代,从自动驾驶汽车到智能家居,控制系统帮助我们完成各种任务,提高效率并提供便利。
然而,传统的控制方法难以应对复杂、非线性的系统,这就引出了神经网络控制的概念。
神经网络控制是一种使用神经网络模型来解决控制问题的方法,它可以有效地应对复杂系统的建模和控制。
本文将探讨神经网络控制在控制系统中的应用和实践,以及其优点和挑战。
神经网络控制的基本原理神经网络控制的基本原理是使用神经网络模型作为控制系统的核心,它可以模拟人类神经系统的行为和学习机制。
神经网络由多个神经元组成,每个神经元根据输入信号进行处理,然后将输出传递给下一层神经元。
通过在训练阶段调整神经元之间的连接权重,神经网络可以学习到输入和输出之间的关系,并根据输入信号产生适当的控制信号。
神经网络控制的应用自动驾驶汽车自动驾驶汽车是神经网络控制在实际中的一个重要应用领域。
通过使用神经网络模型,自动驾驶汽车可以根据传感器收集的数据,自动控制车辆的加速、制动和转向,以实现自主驾驶。
神经网络可以学习不同驾驶情境下的最佳控制策略,并根据实时情况进行调整,提高驾驶的安全性和效率。
工业控制工业控制是另一个广泛应用神经网络控制的领域。
在传统的PID控制方法无法应对非线性、时变的工业过程时,神经网络控制可以提供更好的解决方案。
通过使用神经网络模型,可以对复杂的工业系统进行建模和控制,从而提高系统的稳定性和性能。
机器人控制机器人控制是神经网络控制的另一个重要应用领域。
通过使用神经网络模型,可以对机器人的运动控制、路径规划和任务执行进行精确控制。
神经网络可以学习适应不同任务和环境的控制策略,并根据实时反馈进行调整,提高机器人的操作精度和效率。
神经网络控制的优点非线性建模能力神经网络控制具有良好的非线性建模能力。
传统的线性控制方法难以对非线性系统进行精确的建模和控制,而神经网络模型可以学习非线性系统的动态特性,并提供更准确的控制策略。
基于神经网络的车辆控制系统设计与模拟随着科技的不断进步,人们对于机器自动化的需求越来越大,而车辆控制系统也逐渐成为了重要的研究课题。
基于神经网络的车辆控制系统相比传统的控制系统,具有更高的可靠性和自适应性,因此备受研究者的关注。
本文将介绍基于神经网络的车辆控制系统的设计与模拟。
一、神经网络在车辆控制系统中的应用神经网络作为一种人工智能技术,其能够模拟人脑神经元的作用,从而进行信息处理和学习。
在车辆控制系统中,神经网络能够通过学习和适应不同路况和驾驶员的行为,使车辆在不同情况下做出更好的决策。
例如,在自动驾驶车辆中,神经网络可以通过学习驾驶员的操作和车辆的传感器信息,预测前方路况和其他车辆的行驶状态,并给出相应的控制指令,使车辆能够做出更加智能的驾驶决策。
此外,神经网络还能够进行模式识别和故障诊断,识别车辆的异常状态并及时做出相应的处理。
二、基于神经网络的车辆控制系统设计基于神经网络的车辆控制系统主要由以下几个部分组成:传感器采集模块、数据预处理模块、神经网络模型和控制指令输出模块。
其中,传感器采集模块负责采集车辆行驶过程中的各种信息,如车速、转向角度、加速度等。
数据预处理模块则对采集到的信息进行处理和统计,提取出有用的特征信息。
神经网络模型则根据输入的特征信息,学习和适应不同驾驶员的驾驶特点和不同路况的变化,推导出相应的控制指令。
控制指令输出模块则将神经网络输出的控制指令转化为实际的车辆控制信号,控制车辆的运动。
在神经网络模型的设计中,需要先选择合适的神经网络结构和算法。
目前,深度神经网络(Deep Neural Network,简称DNN)已经被广泛应用于车辆控制系统中,因其具有较高的复杂度和学习能力。
在训练神经网络模型时,需要对数据进行合理的划分和归一化处理,以提高模型的准确性和泛化性能。
此外,还需要对各个网络参数进行优化调试,以获得最佳的控制效果。
三、基于神经网络的车辆控制系统模拟为了验证基于神经网络的车辆控制系统的控制性能,需要进行一定的模拟测试。

基于神经网络的智能控制系统设计近年来,随着人工智能技术的不断发展,神经网络控制技术成为了智能控制领域的新热点。
基于神经网络的智能控制系统,能够实现对复杂系统的智能化控制和优化,具有广泛的应用前景。
本文将介绍基于神经网络的智能控制系统设计的方法和应用场景。
一、神经网络技术神经网络是一种模拟神经元网络结构和功能的信息处理系统,是模拟人脑信息处理机制的一种方式。
神经网络结构可以拟合非线性关系,并能够实现自适应控制和优化。
神经网络技术的应用领域包括:图像识别、语音识别、自然语言处理、控制与优化等。
神经网络技术在智能控制领域的应用主要包括基于模型的控制,基于经验的控制和基于强化学习的控制。
基于模型的控制是通过建立物理模型或数学模型,对系统进行建模和仿真,再根据建模结果设计控制算法。
基于经验的控制是通过对系统历史数据的观察和分析,总结出控制规律和经验,再利用这些经验来调节系统控制参数。
基于强化学习的控制是通过智能体与环境的交互学习,从而找到最优决策策略。
二、神经网络智能控制系统的设计基于神经网络的智能控制系统的设计流程主要包括以下几个步骤:(1)确定控制目标和需求。
根据所要控制的系统的特点和要求,确定控制目标和优化指标,例如,提高产品质量、降低成本、提高生产效率等。
(2)引入神经网络技术。
根据系统的特性和控制目标选择不同的神经网络结构和算法。
例如,对于控制目标为分类或识别的系统,可采用卷积神经网络。
对于控制目标为优化控制的系统,可采用反向传播神经网络。
(3)数据的采集和处理。
采集和处理系统的历史数据,得到训练样本数据集。
例如,对于智能驾驶领域的智能控制系统,可采集车辆传感器的数据,如速度、加速度、路况等。
对于工业生产领域的智能控制系统,可采集生产过程中的温度、流量、压力等参数数据。
(4)神经网络训练。
通过训练样本数据集,对神经网络进行训练,得到训练好的神经网络模型。
(5)控制算法的优化。
根据实际的控制需求和训练好的神经网络模型,设计相应的控制算法,通过不断迭代算法,优化系统控制效果。
智能车外文文献翻译(中文+英文)--毕业设计智能车我们的社会充斥着各种各样的机器智能在过去的世纪我们目睹越来越多日常生活中的苦差事被机器设备解决如洗衣机然而一个既枯燥又危险的保留区域就是日常驾驶汽车2002年120万人死于交通事故这是所有全球21%死亡死因排名第11如果这种趋势继续下去估计从2020年起每一年死于道路交通事故的人将达到850万人事实上美国交通部估计交通事故的整体社会成本每年超过2300亿美元数百或数千辆车共享相同的道路时就导致了大家都熟悉的交通挤塞交通挤塞破坏了我们的生活质量就像空气污染损害公众健康1990年左右公路运输的专业人士开始申请让他们在交通和道路管理于是诞生了智能交通系统ITS 20世纪90年代中后期开始它的系统进行了开发和部署在发达国家旅客今天能够获得旅行条件的信息无论是驾驶自己的车或乘坐公共交通系统随着世界能源危机的持续以及战争和能源-----石油的消耗及汽车饱有量的增加能源在一天一天下降终有一天它会消失的无影无踪石油不是在生资源所以必须在石油耗净之前找到一种代替品随着科技的发展社会的进步有人发明了电动汽车电动汽车将成为人们最为理想的交通工具世界在各各方面的发展都取得丰硕成果尤其是随着汽车电子技术和计算机以及发展迅速的信息时代电子控制技术在汽车上得到了广泛应用汽车上应用的电子装置越来越丰富电子技术不仅用来改善和提高传统汽车电器的质量和性能而且还提高了汽车的动力性燃油经济性可靠性以及废气排放的净化性汽车上广泛使用电子产品不仅降低了成本并且减少维护的复杂性从发动机的燃油喷射点火装置进气控制废气排放控制故障自诊断到车身辅助装置都普遍采用了电子控制技术可以说今后汽车发展主要以机电一体化汽车上广泛采用的电子控制点火系统主要有电子控制燃油喷射系统电子控制点火系统电子控制自动变速器电子控制防滑ABSASR控制系统电子控制悬架系统电子控制动力转向系统车辆动力学控制系统安全气囊系统主动安全带系统电子控制自动空调系统导航系统还有GPS等有了这些系统汽车响应敏捷使用功能强可靠性高既保证发动机动力又降低燃油的消耗而且又满足排放法规的标准汽车是现代人必不可少的交通工具而电动汽车给我们带来无限乐趣外还能给我们劳累一天的身心得以放松就拿自动变速器来说吧汽车在行驶时可以不踩离合器踏板就可以实现自动换档而发动机不会熄火这样有效的提高驾驶方便性减轻驾驶员的疲劳强度自动变速器主要由液力变矩器齿轮变速器油泵液压控制系统电子控制系统油冷却系统等组成电子控制的悬架主要是用来缓冲路面对车身的冲击力以及减少振动保证汽车平顺性和操纵稳定性当汽车行驶在不平坦的道路时汽车能能根据底盘和路面高度自动调整当车高比设置的高度低时就向气室或油缸充气或充油如果是相反就放气或泻油从而保证汽车的水平行驶提高行驶稳定性可变力动力转向系统因能显著改变驾驶员的工作效率和状态所以在电动汽车上广泛使用VDC对汽车性能有着至关重要的作用它能根据需要主动对车轮进行制动来改变汽车的运动状态使汽车达到最佳的行驶状态和操纵性能并增加了汽车的附着性控制性和稳定性除了这些之外4WS4WD的出现大大提高了电动汽车的价值与性能同步提升ABS具有减少制动距离并能保持转向操作能力有效提高行驶方向的稳定性同时减少轮胎的磨损安全气囊的出现在很大程序上保护了驾驶员和乘客的安全大大降低汽车在碰撞时对驾驶员和乘客的缓冲以过到保护生命安全的目的智能电子技术在汽车上得以推广使得汽车在安全行驶和其它功能更上一层楼通过各种传感器实现自动驾驶除些之外智能汽车装备有多种传感器能充分感知交通设施及环境的信息并能随时判断车辆及驾驶员是否处于危险之中具备自主寻路导航避撞不停车收费等功能有效提高运输过程中的安全减少驾驶员的操纵疲劳度提高乘客的舒适度当然蓄电池是电动汽车的关键电动汽车用的蓄电池主要有铅酸蓄电池镍镉蓄电池钠硫蓄电池钠硫蓄电池锂电池锌―空气电池飞轮电池燃料电池和太阳能电池等在诸多种电池中燃料电池是迄今为止最有希望解决汽车能源短缺问题的动力源燃料电池具有高效无污染的特性不同于其他蓄电池其不需要充电只要外部不断地供给燃料就能连续稳定地发电燃料电池汽车FCEV 具有可与内燃机汽车媲美的动力性能在排放燃油经济性方面明显优于内燃机车辆随着计算机和电子产品不断开级换代电动汽车技术也在日趋成熟与完善使得驾驶更安全方便灵活舒适现在电动汽车离普通消费者的距离还很遥远只有少数人在赶赶时髦而已电动汽车真正能够与传统的燃油汽车相竞争今后汽车市场终会被电动汽车和智能汽车所取代这只是时间性的问题这一天终究会来到的ABSGPS4WS4WD以及各种新时代的电子产品与现代高性能汽车默契组合绝妙搭配带给我们无与伦比的精准驾驶舒适性和行驶安全性以AVR 单片机为核心提出了一种智能探测小车的软硬件设计方案系统可以预先设定小车的行走路线能够实现小车与计算机之间的无线通讯通过超声测物和红外测障电路使小车安全行走另外系统通过JTAG 接口在线调试程序软件设计中采用神经网络自学习大大增强了小车的智能化执行元件的伺服系统性能将决定机器人的性能基于AVR 系列单片机并应用积分分离技术设计离散PI 调节器输出PWM 控制信号建立驱动电机的速度伺服控制系统使用AVR - GCC 编译软件开发伺服系统软件设定速度采样频率为2KHz实现对电机速度的实时控制与基于51 系列单片机开发的伺服系统相比本系统所需的外围电路更简单数据处理速度更快实现了机器人响应快速移动平稳该伺服系统的开发尤其适用于智能移动机器人还可以广泛应用于其它智能设备和生产线提出了一种基于AVR 单片机Atmega8 为核心控制器的比赛机器人控制系统通过比赛机器人的特征分析阐述了构成控制系统所需的主控单元电机驱动单元传感检测单元及LCD 显示单元其中详细分析了以MCBL3006S 为核心的伺服电机驱动单元以及关系比赛机器人基本功能实现的循线传感系统及避障传感系统并给出部分程序最后通过实践表明该控制系统开放性好结构简单编程容易智能并高效智能车的避障规则通过对红外传感器的信息进行采集使用二极管D1 发射红外线二极管D2 接收红外信号红外线发射部分不设专门的信号发生电路直接从单片机实现时钟频率既简化了线路和调试工作又能使电路的稳定性和抗干扰能力大大加强经实验验证该系统运行可靠达到了设计要求介绍一种基于CCD 摄像头的路径识别的智能车控制系统设计了硬件结构与方案提出了转向机构的控制策略该智能车能准确实现自主寻迹具备抗干扰性极强稳态误差小等特点智能车系统包括传感器信息采集与处理电机驱动控制算法及控制策略等方面采用激光传感器采集道路信息并反馈给单片机控制系统通过软件进行相关分析处理通过速度反馈和PID 算法控制舵机转向和智能车速度通过实际运行验证本方法使智能车运行稳定可靠其平均速度达到26ms得到比较理想的效果为了综合利用控制模式识别传感器技术汽车电子电气计算机机械等专业领域知识设计实现了一个基于PID 控制算法 CCD 检测系统并采用H C9SDG128 单片机作为主控芯片的智能车系统该系统使用Codewar rio r IDE 集成开发环境作为程序设计的基本软件平台能利用摄像头自动识别路况进行图像处理进而调整方向沿预定轨道前行具有很强的可靠性稳定性快速性扩展性以飞思卡尔杯智能车大赛为研究背景开发了一种智能循迹小车该小车采用光电传感器检测路径获得赛道信息求出小车与黑线间的偏差采用模糊控制对小车的速度进行控制使小车能够自动跟随直道和弯道实践表明采用模糊控制的智能小车在路径识别的精准度稳定性及速度控制上具有明显优势本世纪初期在计算机和信息革命的影响下汽车经历了性能和与驾驶者之间的互动方面最富戏剧性的变革1908年亨利福特T型车的出现体现了汽车设计上的重大突破它不仅开创了轻松更换零件和大量生产的先河而且其用户友好的运作方式让任何人都可以轻松驾驶近90年来类似于福特T型车的简单汽车越来越少汽车迅速成为了一种复杂的移动电脑扮演着领航者护航者甚至第二司机的角色这些新特性不仅改变了我们的驾驶方式还提高了运输服务质量和挽救生命的能力并对美国工业的竞争力提供了支持然而智能车的表现不仅如此相反的使车辆更加智能的这些组件如新信息安全性和自动化技术是作为零配件抵达市场的或作为可选设备或作为售后服务的特殊配件为了提高司机的安全性这些技术不断发展并上市销售但是个别的技术还没有得到整合不能创造出与司机高度协作的完全智能的车辆汽车行业已经意识到并解决了潜在的不协调技术的大量涌入问题但他们的进步受到技术和经济障碍不确定的消费者喜好不完善的标准和准则的阻碍此外无论是传统的汽车制造商或是政府监管机构除非安全问题非常明显都不能控制售后的产品的使用特别是在卡车和公共汽车的使用方面然而还没有一个以人为本的智能车辆试图整合和协调各种技术以解决问题我们也许不仅仅会失去实现新的车载技术的机遇甚至可能会在无意中降低行车的安全性和性能意识到智能车辆的重要性和汽车设计中人为因素所产生的潜在危险之后交通部于1997年启动智能车辆倡议IVI这一举措旨在加快汽车系统的发展和集成用以帮助汽车卡车及巴士司机更安全和有效地操作20世纪80年代的电视连续剧霹雳游侠功能的智能车辆可以跨越颇高的大厦似乎驾驶超音速本身对坏人间谍并有英文用词和管家的个性这款车不仅是聪明但自作聪明虽然在现实世界中的智能车辆将无法飞越站在交通他们将有强大的能力正如所设想的国际疫苗研究所智能车辆将能够提供路线指示感觉对象警告即将发生的碰撞司机自动信号在紧急情况下帮助司机保持警觉并可能最终能够接管驾驶信息和机动车辆的电脑为基础的技术然而是不是新的用途将广泛的汽车电脑开始了旨在提高车辆运行和驾驶员舒适性技术的20世纪80年代这些技术包括电子控制燃油喷射发动机的性能特别是减少汽车排放提高燃油经济性防抱死制动系统以帮助司机保持在湿滑路面控制巡航控制系统以减轻司机的驾驶很长一段乏味而这些技术主要是加强对车辆在车辆技术的最新波其中最感兴趣的是IVI的能力的目的是智能交通旨在加强对驾驶员的能力的系统这些系统包括预警和信息驾驶辅助和自动化技术正如人们具有不同的专业能力不同类型和层次的车载智能车辆技术赋予情报以补充该驱动程序驾驶员信息系统扩大了驾驶员的路线和地点的知识预警系统如防撞技术提高驾驶员的感知能力发生了什么事在周围环境的自动化和驱动技术援助和模拟驾驶者的思想和行动以实际操作或在紧急情况下长时间的车辆暂时的但是在智能车辆将扩大司机的能力它也可能会增加司机的传统角色特别是在新车内的技术中人的作用扩大从感觉运动技能写道托马斯谢里登教授谁负责的人机系统实验室在美国麻省理工学院MIT这一规划程序员在自动化诊断者监控学习者和管理者ITS的研究显示出将在智能车辆中应用的许多技术的好处可行性路线引导系统将帮助司机更好的行驶在不熟悉的街道或找到到达目的地最快的路线1992年和1993年在交通部主办的奥兰多TravTek实地测试中显示配备了路线引导系统的游客驾驶汽车减少了30的车辆转错弯的问题与使用纸质地图的游客相比节省了20的时间防撞系统可以加强交通安全规范完全防止交通事故的发生据研究表明如果司机能多半秒钟反应时间就可以避免60的岔路交通事故和30的迎面相撞而75的车辆事故是由司机走神造成的国家公路交通安全管理局NHTSA估计每年美国应用于这三类的防撞系统能够避免110万次交通事故占总交通事故数的17而这能够挽救17500人的生命安全带和气囊约挽救10500人并挽回260亿美元的损失其他的安全设施正在测试中包括自动撞击告知系统当一辆汽车的安全气囊弹出时该系统会自动发出求救信号而昏睡司机警告系统可以防止在汽车行驶过程中司机昏昏欲睡车内自动化系统可以在紧急情况下接管驾驶或在允许长时间行驶的情况下自动驾驶1996年国家公路交通安全管理局开始实地测试智能巡航控制系统该系统能够自动调整车辆行驶速度与前方车辆保持安全距离以评价这种技术在安全方面的影响更加戏剧化的一幕出现在名为放开手放开脚的驾驶中去年夏天由交通部和其他9个公私营组织合办的全国自动公路系统联盟NAHSC在圣地亚哥I-15号路一段12公里的测试路段示范了未来全自动车辆的原型未来自动公路管理系统将在速度越来越高车距越来越短的高速地段提高交通管理者2-3倍的监管力度该系统也可能消除人为操作错误引发的交通事故的发生提高路段的安全性除了为乘客提供安全和高效的交通以外联邦政府预计智能汽车固有的发展趋势也有可能提高美国的经济竞争能力为了让智能汽车发挥出它最大的潜力它们必须能够与智能交通基础设施系统和其他的智能汽车沟通交流例如与智能基础设施系统沟通可以使智能汽车了解事故的发生然后实时主动地选择路线智能汽车还可以作为探针将有关于路段条件的信息发送给智能基础设施系统用以创建更加丰富的道路条件基本信息此外全自动汽车应当还可以在某种程度上依赖于智能基础设施系统和其他的智能汽车提供的引导例如不久前圣地亚哥的美国直升机协会AHS显示在保险杠下安装有磁动传感器的自动汽车成功被植入路表下方12米的磁铁引导行驶在未来的5到10年我们应该能够看到具有特别驱动信息和报警系统能力的第一代产品随着信息的发展这些系统将日益完善虽然防撞系统会提供一些自动的援助司机们仍然持有汽车的完全控制权此外因为和智能基础设施系统有了初步的沟通能力汽车将在路段条件的实时侦查方面更加智能化约10至15年一些改进措施的应用将为我们带来更好更智能的第二代产品虽然司机仍然有汽车的完全控制权但防撞系统将可以在紧急情况下采取暂时控制另外更加精密的语音识别系统将被纳入司机与汽车的互动方面车辆之间能够互相沟通以提高防撞能力当然与智能基础设施系统的沟通也将更加积极有效大约20年在第三代产品中我们将能看到完全自动化的公路系统车辆和基础设施的整合系统司机与汽车之间更加贴近的互动如视觉增强和平视显示仪的使用回顾一个世纪泛滥如洪的技术汽车作为一项尤为突出的动力学发明而鹤立鸡群在下个世纪这种活力将推动信息和计算机技术的发展我们未来的挑战是整合新的信息安全和自动化技术用以创造以人为本的智能车辆提高安全性地面传动效率和经济竞争能力Intelligent VehicleOur society is awash in machine intelligence of various kindsOver the last century we have witnessed more and more of the drudgery of daily living being replaced by devices such as washing machines One remaining area of both drudgery and danger however is the daily act ofdriving automobiles 12million people were killed in traffic crashes in 2002 which was 21 of all globaldeaths and the 11th ranked cause of death If this trend continues an estimated 85 million people will bedying every year in road crashes by 2020 in fact the US Department of Transportation has estimated the overall societal cost of road crashes annually in the United States at greater than 230 billion when hundreds or thousands of vehicles are sharing the same roads at the same time leading to the all too familiar experience of congested traffic Traffic congestion undermines our quality of life in the same way air pollution undermines public healthAround 1990 road transportation professionals began to apply them to traffic and road management Thus was born the intelligent transportation system ITS Starting in the late 1990s ITS systems were developed and deployedIn developed countries travelers today have access to signifi-cant amounts of information about travel conditions whether they are driving their own vehicle or riding on public transit systems As the world energy crisis and the war and the energy consumption of oil -- and are full of energy in one day someday it will disappear without a trace Oil is not in resources So in oil consumption must be clean before finding a replacement With the development of science and technology the progress of the society people invented the electric car Electric cars will become the most ideal of transportationIn the development of world each aspect is fruitful especially with the automobile electronic technology and computer and rapid development of the information age The electronic control technology in the car ona wide range of applications the application of the electronic device cars and electronic technology not only to improve and enhance the quality and the traditional automobile electrical performance but also improve the automobile fuel economy performance reliability and emissions purification Widely used in automobile electronic products not only reduces the cost and reduce the complexity of the maintenance From the fuel injection engine ignition devices air control and emission control and fault diagnosis to the body auxiliary devices are generally used in electronic control technology auto development mainly electromechanical integration Widely used in automotive electronic control ignition system mainly electronic control fuel injection system electronic control ignition system electronic control automatic transmission electronic control ABSASR control system electronic control suspension system electronic control power steering system vehicle dynamic control system the airbag systems active belt system electronic control system and the automatic air-conditioning and GPS navigation system etc With the system response the use function of quick car high reliability guarantees of engine power and reduce fuel consumption and emission regulations meet standardsThe car is essential to modern traffic tools And electric cars bring us infinite joy will give us the physical and mental relaxation Take for example automatic transmission in road can not on the clutch can achieveautomatic shift and engine flameout not so effective improve the driving convenience lighten the fatigue strength Automatic transmission consists mainly of hydraulic torque converter gear transmission pump hydraulic control system electronic control system and oil cooling system etc The electronic control of suspension is mainly used to cushion the impact of the body and the road to reduce vibration that car getting smooth-going and stability When the vehicle in the car when the road uneven road can according to automatically adjust the height When the car ratio of height low set to gas or oil cylinder filling or oil If is opposite gas or diarrhea To ensure and improve the level of driving cars driving stability Variable force power steering system can significantly change the driver for the work efficiency and the state so widely used in electric cars VDC to vehicle performance has important function it can according to the need of active braking to change the wheels of the car car motions of state and optimum control performance and increased automobile adhesion controlling and stability Besides these appear beyond 4WS 4WD electric cars can greatly improve the performance of the value and ascending simultaneously ABS braking distance is reduced and can keep turning skills effectively improve the stability of the directions simultaneously reduce tyre wear The airbag appear in large programs protected the driver and passengers safety and greatly reduce automobile in collision of drivers and passengers in the buffer to protect the safety of lifeIntelligent electronic technology in the bus to promote safe driving and that the other functions The realization of automatic driving through various sensors Except some smart cars equipped with multiple outside sensors can fully perception of information and traffic facilities and to judge whether the vehicles and drivers in danger has the independent pathfinding navigation avoid bump no parking fees etc Function Effectively improve the safe transport of manipulation reduce the pilot fatigue improve passenger comfort Of course battery electric vehicle is the key the electric car battery mainly has the use of lead-acid batteries nickel cadmium battery the battery sodium sulfide sodium sulfide lithium battery the battery the battery the flywheel zinc - air fuel cell and solar battery the battery In many kind of cells the fuel cell is by far the most want to solve the problem of energy shortage car Fuel cells have high pollution characteristics different from other battery the battery need not only external constantly supply of fuel and electricity can continuously steadily Fuel cell vehicles FCEV can be matched with the car engine performance and fuel economy and emission in the aspects of superior internal-combustion vehiclesic car from ordinary consumers distance is still very far away only a few pAlong with the computer and electronic product constantly upgrading electric car open class in mature technology and perfected that drive more safe convenient and flexible comfortable Now the electreople in bandwagonElectric cars with traditional to compete in the market the car Will was electric cars and intelligent car replaced This is the question that day after timing will come ABS GPS and various new 4WD 4WS electronic products and the modern era excellent performance auto tacit understanding is tie-in bring us unparalleled precision driving comfort and safety of drivingThe hardware and software of the intelligent vehicle are designed based on AVRThis system could set the route in advance The vehicle could communicate with the PC vianRF401 and could run safely with the help of ultra sound detection and infrared measuring circuitNeural network self- study is used to improve the intelligence of the vehicle The performance of servo systems will determine the property of the robot. Based on AVRseries MCUthe velocity servo system for driving motor is created in this paperincluding a discrete PIregulator which will work out a PWM control signal with applying the skill of integral separation. The velocities of motors will be controlled real - time with the speed sampling frequency set for 2KHz by using the AVR - GCC compiler software development. Compared to the servo system development based on the 51 Series MCUthe system here has these advantages of simpler peripheral circuit and faster data processing.The experiments demonstrate thatthe mobile robot runs stably and smoothly by the control of AVR unitsand that the design proposal especially benefits thedevelopment of intelligent mobile robotsalso can be widely used in the development of other smart devices and product lines.A new design of contest robot cont rol system based on AVR Atmega8 was put forward According to the character of contest robot the main cont rol unit motor drive unit sense detection unit and LCDdisplay unit wereintroduced Furthermore the servo driver system based on MCBL3006S the line t racker sensor system and the obstacle avoidance sensor system were presented in detail Finally the performance showsthat the cont rol system is open simple easy programming intelligent and efficiency Avoidance rules of intelligent vehicle obstacle are introducted Through the collection of infrared sensor formation the rules use diode D1 to launch and diode D2 to receive infrared signals Infrared transmitter signal without a dedicated circuit comes directly from the MCU clock frequency which not only simplifie the circuit and debugging but also make the circuit stability and anti- jamming capability greatly enhanced After the experimental verification the system runs reliably meet the design requirementsA smart car control sys tem of the path informat ion identif ied based on CCD camera was introduced The hardware s truc ture and scheme were designed The contro l strategy of s teering mechanismwas presented T he smart car not only can identify the road prec isely but also have antinterference performance and small s teady state errorThis article designed smartcar systemincludes the aspects of the sensor information acquisition and processing motor drive control algorithm and control strategy etcUsing laser sensor to collect the road information which can feedback to the microcontroller control systemthen making analytical processing combined with the softwareWith velocity feedback and PID control algorithms to control steering engine and the speed of smartcarVerified by actual operation this method makes smartcar travel stably and reliablyand its average speed to reach 26m s and get a satisfied resultsBy the aid o f the pro fessio na l know ledge of contr ol patter n recog nitio n senso r t echnolog y aut omotive elect ronics elect ricit y computer machiner y and so on an intelligent vehicle system is designed with PID control a lg orithmCCD detection system and H C9SDG128 M CU Codew arr ior IDE integr ated dev elo pment pro gr amming env ir onment is taken as a basic softw are platform t hat can aut omatically deal w ith the traffic and image pro cessing and then adjust the mo ving direction along the scheduled or bit by t he aid of a CCD camera The system has many advantages such as hig h r eliability high stability good speedability and scalabilityBased on the research background of the Free-Scale smart car competition a smart trackfollowing car is designed In the car the photo electricity sensor is used to check the path and obtain the information。
基于神经网络的智能车控制
对于智能小车的控制算法, 神经网络应该是不错的选择。
神经网络的研究一般是基于 OFF-LINE 的,另外,神经网络无论在分类还是拟合作用上,计算精确性并不是100%,这也是航空技术不用神网的原因。
此篇论文主要讨论神经网络用在小车控制算法上的可能性以及如何利用神经网络于小车控制算法。
一般用机理分析法和系统辨识法对实验数据建模, 得到传递函数, 然后通过调试实际系统, 从开环到闭环, 不断调整参数和控制参数。
举个例子:要建立小车直线、弧线行走的控制模型, 即通过实测数据建立驱动控制和小车转弯偏移量的关系, 那么输入的参数是当前速度, 曲率大小, 转弯弧度, 最大安全速度, 目前偏移角度等等参数, 而输出的就是目标速度, 目标角度。
这个输入和输出之间的关系就是控制模型, 一般也叫控制器。
小车跑得快,跑得稳,主要就是这个”控制器“,控制器拟合得好,适应性强,效果就不差。
小车控制算法要解决的问题是 : 输入—— >控制模型—— >输出控制参数。
按一般的方法, 控制模型的建立需要大量数据, 离线在线都必需调试多遍, 系统的适应性不佳。
而尝试神经网络,这些问题就都可以很大程度地避免了。
首先, 有必要介绍一下神经网络, 到底神经网络是干什么用的, 如何用。
神经网络的理论并不复杂, 我想是有些书或论文把简单问题复杂化了。
大家不要对它恐惧。
一堆数据 A ,通过一个 NET 不断调整,得到另一堆数据 B 。
而 A 和目标结果数据 C 都是已知的, NET 是未知的,这个调整 NET 的过程就是训练, NET 训练好的结果是使 B 和 C 的误差最小,误差合理就收敛。
收敛完了,这个 NET 就可以用了。
神经网格的核心就是得到一个 NET 。
控制模型就是一个 NET , NET 包含很多参数,如权值,隐含层数,训练方法,神经元模型, 传递函数等,只要建立一个 NET ,那么输入和输出的关系就建立起来了。
神经网络主要有两个作用:一个是分类,另一个是回归(拟合。
如果把它运用于小车控制算法,毫无疑问是用于回归拟合的功能。
回归什么呢?对, 回归上面所说的控制模型, 这个 NET 就是控制器。
神经网络用于小车控制算法上的优势比较明显, 模型可以随时调整, 而且模型不是通过公式表示, 只是一个 NET 来表达, 避免复杂的参数调整和试算过程。
通过新的环境参数得到新的
NET ,增强系统的适应性。
为什么有些车在自己的场地上跑得好好的,在其它的场地上就不行呢? 为什么有些车不断地调整控制模型, 控制效果却不好呢? 如何选择控制器的输入参数,参数的权重如何介定呢? 一系列的问题,神经网络可以给大家答案。
神经网络常用的一般有:感知器, BP , HOPFILED , RBF , ANN , ART 和Kohonen 网络。
如果不用工具箱函数 (即 MATLAB 的 API 函数 , 自己写的话, 无所谓, 说不定自己可以创造一种网络。
只要收敛快, 计算量小, 泛化性能好, 网络耗费资源小就行, 话说起来简单, 却有一定难度。
但是小车的需求低,精度无需太高,因此应该来说比较容易实现。
神经网络比 PID , 模糊控制,遗传算法, bangbang 等算法,更宏观,可以理解为从系统整体入手建模。
但是正如本博文开头所说:计算量和收敛性必需保证, 神经网络才有运用的可能性。
我建议从以下几个方面解决这两个问题:
(1不要指望神经网络的实时性。
神经网络最要命的耗费时间是训练,神经网络在车运行时进行一两次成功的训练即可。
在小车跑直线时通过获得的数据训练, 因为直线时 CPU 会有空闲时间。
另外,相信大家经常用拨码开关去选择多种控制决策,这不失一种方法。
但是,这个控制决策是死的,也是事先规划好的,必定不能适应新的KT 板的各种路径。
(2最好用片内 FLASH 或 SD 卡, 数据的处理是很重要的, 数据也非常宝贵的, 把数据存起来, 传给 PC , OFFLINE 时研究神经网络的算法 (有无数种训练算法 , 这是其一。
其二, 训练好的网络存在 SD 卡里,下次如果需要再训练,从老的网络开始(一般网络权值是随机开始 ,效率会高很多。
(3正如数据融合一样,有决策层和数据层的融合,神经网络也一样,有决策层和数据层的运用。
由于小车的路径是连续的, 那么数据层的神经网络肯定是用得着的。
在图像采集里, 一般是 40mS 采集一次路径并做控制判决, 那么这 40mS 的时间不够用怎么办?大家常用的一种方法是干脆 80mS 采集一次。
我的建议是前 60ms 采集一次图像并作控制决策。
后 20ms 运用前 4Oms 提取的路径信息并用神网预测路径
的变化,这么一来相当于在 20ms 的时间里采集了一次图像。
可想而知,效率提高
了。
(4上面是从数据层采用神经网络,这里讲一下从决策层采作神经网络。
举个例子,假如控制器的输出 -3 -2 -1 0 1 2 3分别代表舵机左偏 30,左偏 20,左偏 10,直行,右偏 10,右偏 20,右偏 30,而小车前 7次的控制决策是:直行,右偏 10,直行,左偏 10,直行,右偏 10,直行, (0 1 0 -1 0 1 0 ,那么第 8次的决策通过神网应该就是左偏(-1 。
如果实际需要的不是左偏的话,就应该把神网“惩罚”一下。
(5寻找合适的误差阈值。
小车寻迹不像激光切割,精度要求并不高。
其训练的
误差值可以“商量”的。
(6神网的训练数据不是抓到一个就可以的, 是要选择的。
但这个选择也是要耗时间的,
如果是在 PC 上, FCM (模糊聚类是不错的选择。
但是 MCU 是扛不起这个重
任的, 于是选择合适的训练数据和目标数据也是一个重要的研究话题。
这里, 如何优化神网输入不是重点,略过。
(7重视归一化处理和神经网络训练算法。
这两点很重要, 归一化可以理解为把(100 45 -67 90归一化为(1 0.45 -0.67 0.9 , 好处是改进数据的规范性,加快收敛。
另外训练算法的重要性不言而喻,如用梯度下降法训练法使误差达到最小,什么是梯度下降法呢?打个比方 ,你要下山,山前的坡度是 30度,山后是悬崖坡度是 90度,要下山快, 当然是找坡度大的直接跳。
这个下山坡度和训练梯度是同一个含义
(8 个人觉得利用神经网络进行速度控制有较大优势, 比 PID 控制起来精度会有些缺陷, 但速度快。
由于摩阻力, 小车动力性能, 小车驱动性能, 电池等原因, 需要对速度闭环控制。
假如:小车以单位时间 10ms 为节拍, 速度从 X1m/s->Y1m/s, 需要PWM 为 d1%占空比, 速度从 X2m/s->Y2m/s,需要 PWM 为 d2%占空比 ....... 速度从Xn m/s->Yn m/s,需要 PWM 为 dn%占空比,那么以(X , Y ' 为训练输入, (D'为训练输
出,建立神经网络并训练, 那么建立起 PWM 和速度控制之间的关系是非常轻易的事。