“创意之星”模块化机器人实验指导书(实验版)
- 格式:doc
- 大小:3.23 MB
- 文档页数:53
机器人技术基础实验指导书机电一体化实验室2009年6月学生实验规则1、实验前,学生要认真阅读实验指导书中内容,以求对实验目的、内容、方法和步骤有初步的了解。
2、遵守实验室的各项规章制度,听从教师的指导,实验时必须严肃、认真、细致。
3、要求在教师指导下,独立按时完成规定的实验内容。
4、实验过程中,学生不得无故迟到、早退、旷课、有事须请假批准。
5、遵守操作规则,注意安全。
6、爱护实验中用到的相关设备与工具,丢失损失东西,及时报告,照价赔偿。
7、实验结束,应将设备、仪器、工具清理干净,搞好当天卫生。
第一章HNC-IR型教学机器人简介HNC-IR型教学机器人的总体结构为立式关节形式,具有五个自由度,各关节均采用步进电机经谐波减速器和绳轮驱动,绳轮轮系具有消除间隙机构,因此定位精度较高。
机器人的各关节结构实现了部件化,便于更换不同形式的驱动电机,根据教学、科研和工业的需要可以在各关节的驱动轴上安装力或位置检测元件,更换不同手爪非常简便。
1.1 HNC-IR教学机器人基本配置HNC-IR教学机器人由控制单元、示教操作盒、控制电柜和机器人主体等部分组成,通过连接电缆连成一体,如图1.1所示。
1.1.1 控制单元HNC-IR教学机器人的控制单元实际上就是一台工控PC机或商用PC机。
它包括主机、彩色CRT显示器、标准键盘等几部分,通过打印机接口(并行接口)由打印电缆与控制电柜侧面的“计算机接口”插座相连。
PC机键盘和CRT是人机交互的主要设备,负责编程及系统管理操作。
1.1.2 示教操作盒HNC-IR教学机器人的示教操作盒如图1.2所示,通过连接电缆直接连于控制电柜后面的“示教盒互连”插头上。
示教操作盒用于直接控制机器人的动作及获取示教编程位姿。
示教操作盒的使用介绍1.4节。
1.1.3 控制电柜控制电柜通过“220V电源”插头由连接电缆连到交流220V电源上,为机器人的控制提供强电,它把控制单元和示教操作盒送来的命令和操作转换为控制机器人动作的信号,送到固定在机器人主体上的步进电机,经谐波减速器和绳轮驱动带动机器人关节转动。
大学专业实践课题:四足追光机器人姓名:学院:机械工程学院专业:机械设计制造及其自动化班级:学号:指导教师:四足追光机器人一、实验目的用“创意之星"机器人套件组装可以进行追光行走的四足机器人;二、实验套件(创意之星)1。
机械结构:基本结构件、舵机动力关节、可转向轮子、机械爪等;2.控制系统:控制卡、舵机、直流电机、各类传感器、电源等;3。
控制软件:NorthSTAR 图形化开发环境三、实验步骤1、确定其基本功能基本功能:a.在平地上通过步态设计,可以正常迈步行走.同时头部传感器检测前方光源,便于及时调整运行动作,追光行走。
b.当左侧红外线传感器检测到光源强于右侧红外线传感器检测到的光源时,机器人运行步态会改变,控制机器人左转.右侧的光源强于左侧的光源时用同样的原理控制机器人右转。
c.当两侧均检测到光源亮度相等时,调整步态,追光机器人会向前走。
直至检测不到光源停止,再控制向后退.2、机构设计整个巡视机器人由大致三个模块组成:a。
由8个舵机组成四足机器人的4条腿模块;b。
由2个舵机组成四足机器人尾部部分;c。
由2个红外接近传感器和1个舵机组成的感应模块。
3、机构的装配整个四足避障机器人由1个控制板,1个舵机和两个红外接近传感器组成可转动头部,8个舵机组成主要的4条机械腿,由两个舵机构成尾部部分。
整个四足机器人共由11个舵机、两个红外接近传感器及“创意之星”机器人零部件组成。
安装可分为零件的安装,部件的组装以及最后的总装过程。
根据预先设计好的机器人结构方案,组装四条腿的部件、头部、尾部以及机器人主体部分,最后组装到一块,形成完整的整体结构.4、连接电线由于我们此次使用的是创意之星的标准套件,舵机接线、传感器模拟与数字端口的连接都及其方便简单.5、设置各个舵机的限制参数一方面保护所使用器件的性能,防止过载或错误操作而将其损坏;另一方面也为我们进行各种复杂的调试做良好的准备,能够顺利的完成设计任务。
机器人实验指导书主编王俊于洋洋贺莹天津大学仁爱学院专用教材2017年6月实验须知1. 实验是学习现代制造技术课程不可缺少的组成部分,这对加深理解基本概念,巩固课堂上所学的知识都很重要,每次实验必须认真对待。
2.做实验前,必须认真预习有关课程内容和阅读实验指导书,熟悉实验内容和步骤。
3. 做实验时要严格按照实验指导书的内容,步骤进行,认真操作,做好实验记录。
4. 做完实验,请指导教师看实验结果,教师确认实验通过后.应将实验台恢复原状,经指导教师同意后才能离开实验室。
5. 每次实验后,按实验指导书的要求,填好实验报告,交给指导老师审阅。
实验一MD-1200机器人机构测绘和焊接实验(一)实验目的及意义1、实验意义:机器人技术是综合了许多学科的知识,例如计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当今研究领域十分重视的课题,机器人在很多领域都得到广泛应用。
机器人是一种具有人体上肢的部分功能,工作程序固定的自动化装置。
机器人具有结构简单、成本低廉、维修容易的优势,但功能较少,适应性较差。
目前我国常把具有上述特点的机器人称为专用机器人,而把工业机械人称为通用机器人。
简而言之,机器人就是用机器代替人手,把工件由某个地方移向指定的工作位置,或按照工作要求以操纵工件进行加工。
工业机器人,一般指的是在工厂车间环境中,配合自动化生产的需要,代替人来完成材料或零件的搬运、加工、装配等操作的一种机器人。
国际标准化组织(ISO)在对工业机器人所下的定义是“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能借助于可编程序操作来处理各种材料、零件、工具和专用设备,以执行种种任务”。
通过本次实验使学生充分认识焊接工业机器人结构组成及应用,熟练进行精确的测绘与控制,对于学好工业机器人技术及应用、机械工程测试技术基础等专业课程有着非常重要的意义。
2、实验目的:(1)掌握机器人的组成。
一、“创意之星机器人套件”课程体系介绍以“创意之星模块化机器人套件”为依托。
展开相关实验教学。
1.1 一般性实验以机器人形态为载体,激发学习兴趣和动手参与能力。
1.2.基础课程、专业课程实验教学课程体系参考实训室可以为工科专业的很大一部分课程提供实验环境。
1、在开始理论教学之前,先展示有趣味、有吸引力的机器人构型,比如机器狗、六足爬虫、巡线小车等。
这个过程让学生明白此门课程的实际运用价值,了解实际运用方式,调动学生学习积极性。
2、开课的过程,穿插合适的实验课程,阶段性的进行知识巩固和加深。
3、在课程末期,以实验为重要的成绩考核方式,通过实际动手操作来考核学生的实际掌握程度。
综合实验搭建一个四轮小车,在单片机控制器上接入IO传感器、AD传感器、指示灯等,做一个自主避障小车。
综合检查各种传感器的掌握和运用能力。
8单片机原理课程设计综合电子系统设计设计擂台赛机器人以综合性的机器人项目,验证学生C语言、单片机、自动控制等等学科的知识掌握程度。
考察学生解决实际工程问题的能力和思路。
设计爬楼梯机器人设计工业AGV自主导引机器人其它实验内容1.3.以实践为核心的项目式教学模式项目式教学法将传统课程中的系统、完整的知识体系转化为若干个“教学项目”,围绕着这些项目来组织教学,使学生参与项目完成的全过程来进行学习。
项目式教学强调以教案为重点过渡到以完成项目为重点,其主要特点在于避开传统的学科体系教学知识的完整性和系统性。
始终围绕着项目是否能够完成而进行,对知识结构的要求本着“够用”的原则,重点在于培养学生的动手的能力、独立获取信息的能力和自主构建知识的能力。
项目式教学模式面向工程项目、面向真实应用,注重实践能力、团队能力的培养,将培养优秀设计师、工程师的思想贯穿整个课程体系和教学过程。
在课程设置上体现了电子、信息、计算机、系统软硬件设计、单片机、嵌入式系统等方面的知识运用,使学生能够融会贯通本科所学知识,同时具有较强的实践能力与工程应用能力。
创意之星机器人说明书目录1结构套件简介 (3)1.1 结构件概述 (3)1.2 ConnFLEX连接结构 (3)1.3 不同版本......................................................................................................... .. (4)1.4 使用零件3D模型 (6)2控制器及电源 (7)2.1 MultiFLEX™2-A VR控制器 (8)2.2 MultiFLEX™2-PXA270控制器 (9)2.3 电池和直流电源 (12)3传感器 (12)3.1传感器的信号类型及电气规范 (13)3.2“创意之星”传感器接口 (14)3.1接近传感器 ...................................................................................................... (16)3.2 测距传感器 (19)3.3 声音传感器 (24)3.4 碰撞传感器 (26)3.5 倾覆传感器 (26)3.6 温度传感器 (27)3.7 光强传感器 (27)3.8 灰度传感器 (28)3.9 视觉和语音传感器 (28)4执行器 (29)4.1 CDS5516机器人舵机 (29)4.2 CDS5401大扭矩R/C舵机 (32)4.3 BDMC1203电机驱动模块 (33)4.4 Faulhaber大功率减速电机 (34)5 NorthSTAR 图形化开发环境 (35)5.1 安装及使用介绍 (35)5.2 使用流程图开发 (39)5.3 手写代码开发 (46)5.4 调试与在线监控 (47)6 其它部件 (54)6.1 UP-Debugger 下载调试器 (54)6.2 WiFi 无线网卡或以太网线缆 (55)6.3 ZigBee无线模组 (56)1结构套件简介1.1 结构件概述“创意之星”是一种模块化机器人组件,其特点是组成机器人的各种零件都是通用、可重组的,各个零件之间有统一的连接方式,零件之间可以自由组合,从而构建出各种各样的机器人构型。

1 零件清单- 1.1 创意之星-机器人套件(入门版)- 1.1 创意之星-机器人套件(入门版)由于“创意之星”模块化机器人套件具有多种版本,并有丰富的选购件可供选用,因此您可能会发现您手头的部分零件不足以组装出您所需要的机器人构型。
本手册第6~10页列出了适用于不同版本的构型。
请根据您选购的产品版本来选择适合的组装范例,由于产品升级、配置更改可能导致本手册内容不尽准确,敬请谅解!产品光盘中包含有本手册中所有范例的3D实体模型。
在您动手组装前,您可以使用Unigraphics、ProEngineer、SolidWorks 等软件,在计算机上搭建3D虚拟样机。
这将帮助您熟悉本产品,并对搭建出的样机的外观有直观的体验。
本手册不包含机器人控制方面的教程。
关于如何对机器人进行编程控制,将在配套的《实验指导书》中详细介绍。
关于本手册或者本产品的任何疑问,请登录/,“技术论坛”发帖子请求帮助,博创科技的技术人员将为您及时解答。
技术服务电话:86-10-82114870/4887/4890技术服务邮箱:robot_service@目录1 零件清单 (4)1.1 创意之星-机器人套件(入门版) (4)1.2 创意之星-机器人套件(标准版) (5)1.3 创意之星-机器人套件(高级版) (6)2 本教程适用范围 (7)2.1 适用于入门版的范例 (7)2.1 适用于标准版的范例 (9)1 零件清单- 1.1 创意之星-2.1 适用于高级版的范例.3 准备工作.3.1 工具3.2 安全4 基本构型 (14)4.1 基本连接 (14)4.2 舵机相关 (16)4.3 传感器 (21)4.5 控制器 (21)4.6 机械手 (24)5 初级搭建示例 (25)5.1 3DOF-简易机械臂 (25)5.2 4DOF-简易人型机器人 (29)5.3 4DOF-简易四轮小车 (32)5.4 5DOF-全向四驱车(全向轮) (35)6 高级搭建示例 (40)6.1 7DOF-六关节机械手 (40)6.2 10DOF-四足机器人2 (45)6.3 9DOF-全向四驱车(普通) (49)6.4 8DOF-履带式机器人 (51)6.5 18DOF-六足机器人 (56)6.6 13DOF-蛇形机器人 (60)6.7 16DOF-机器恐龙 (63)- 1.1 创意之星-机器人套件(入门版)1 零件清单- 1.2 创意之星-1.2 创意之星-机器人套件(标准版)机器人套件(高级版)- 1.3 创意之星-2 本教程适用范围 - 2.12 本教程适用范围2.1 适用于入门版的范例- 2.1 适用于入门版的范例2 本教程适用范围- 2.12.1 适用于标准版的范例- 2.1 适用于标准版的范例2 本教程适用范围 - 2.12.1 适用于高级版的范例- 2.1 适用于高级版的范例3 准备工作- 3.1 工具3 准备工作3.1 工具十字螺丝刀,尖嘴钳,工具刀3.2 安全用力过猛可能造成零件崩裂注意尖锐的地方放到婴儿拿不到的地方细小零件防止吞食.4 基本构型- 4.1 基本连接4 基本构型- 4.1 基本连接4 基本构型- 4.2 舵机相关4 基本构型 - 4.2 舵机相关4 基本构型- 4.2 舵机相关4 基本构型- 4.2 舵机相关4 基本构型- 4.2 舵机相关4 基本构型 - 4.3 传感器4.3 传感器4.5 控制器控制卡与底板连接的3种方式4 基本构型- 4.5 控制器4 基本构型- 4.5 控制器控制卡与L型件连接4 基本构型- 4.6 机械手5 初级搭建示例 - 5.1 3DOF-5 初级搭建示例5.1 3DOF-简易机械臂零件清单*以下附件均为实际尺寸。
第一次实验:MultiFLEX控制卡编程实验蜂鸣器实验#include <avr/io.h>#define BEEP_ON PORTG |= _BV(PG3) #define BEEP_OFF PORTG &= ~_BV(PG3) int main(void){inti,j;PORTG = 0;DDRG = 0xff;while(1){for(i=0;i<0xFF;i++){for(j=0;j<0xFF;j++);}BEEP_ON;for(i=0;i<0xFF;i++){for(j=0;j<0xFF;j++);}BEEP_OFF;}}IO口控制实验#include "Public.h"#include "Usertask.h"void user_task(void){uint8 io_in;uint8 io_out;uint8 temp8;uint16 temp16;gpio_mode_set(0x00FF);write_gpio(0xFF00);while(1){temp16 = read_gpio();io_in = (uint8)(temp16>>8);temp8=(io_in&0x80);if(temp8==0){io_out=0x01;while(io_out){write_gpio(~((uint16)io_out));delay(5);//延时5×20MS=0.1sio_out<<=1;write_gpio(~((uint16)io_out));delay(5);}}else write_gpio(0xFF00);}}第二次实验:多自由度串联式机械手#include "Public.h"#include "Usertask.h"void user_task(void){uint8 array_rc[23]={0};//舵机控制数组长度为24,可控制12路舵机,舵机运动函数要求array_rc[偶数]为舵机目标角度值,array_rc[奇数]为舵机运动速度值array_rc[0]=90; //舵机1,中位为0度(对应数值90),目标角度+20度。
Inspire your Imagination 创意之星™模块化机器人套件完全介绍目录目录 (1)1 产品介绍 (2)1.1 概述和主要特点 (2)1.2 适用领域 (2)1.3 创意之星可以构成这些机器人,并且更多! (3)1.4 产品照片 (6)2 适合不同用户的三个版本 (7)2.1 创意之星™机器人套件标准版 (7)2.2 创意之星™机器人套件入门版 (9)2.3 创意之星™机器人套件高级版 (11)3 关键技术介绍 (14)3.1 创新的结构连接方式 (14)3.2 MultiFLEX2控制器 (15)3.3 NorthSTAR软件开发环境 (17)3.4 机器人舵机 (19)4 “创意之星”机器人套件组装实例图片 (21)1 产品介绍1.1 概述和主要特点博创科技刚刚推出了最新的UP-InnoSTAR™创意之星™机器人套件产品,以替换上一代“创意之星”产品。
该套件是一套用于开展机器人创新实验的模块化机器人套件。
分为入门版、标准版和高级版,并有多种配件可选购。
“创意之星™”机器人套件的总体特点类似LEGO Mindstorms™NXT套件,都是具备多种基本“积木”构件的模块化零件套装,包括多种数百个结构零件,一个控制器,多个电机、舵机执行器,多种传感器,以及电池、电缆等附件。
用这些“积木”可以搭建出各种发挥想象力的机器人模型来。
所不同的是,“创意之星™”机器人套件主要为创作机器人而设计。
具备32位520MHz 的处理器,可处理视频、语音、大容量存储;支持最多254个CDS5500总线式舵机(也可作减速电机使用,指令兼容Robotis的Dynamixel AX12+),并同时具备多个I/O和A/D转换器,以及USB、Wi-Fi等端口。
另外,机器人的结构件和创新的连接方式专为创作机器人而设计,连接刚度和结构强度不逊色于铝合金构件,并且连接非常方便。
这样的一套机器人套件可以搭建出无数种机器人构型!“创意之星™”机器人套件配有《构型搭建指南》和《机器人编程实验指导书》等文档,并提供所有构件的3D模型,以及20多种典型构型的装配体3D模型,便于用户学习,并可用于搭建虚拟样机。
创意之星说明书创意之星说明书第一章: 产品概述1.1 产品介绍1.2 主要特点1.3 技术规格第二章: 安全须知2.1 使用前的准备2.2 电源和电池使用注意事项2.3 使用环境要求2.4 使用过程中的安全注意事项第三章: 快速开始3.1 组装和拆卸3.2 电源连接和开关机3.3 连接方式或电脑3.4 软件和安装第四章: 产品功能详解4.1 运动功能4.2 语音交互功能4.3 视觉识别功能4.4 玩耍互动功能4.5 编程控制功能第五章: 常见问题解答5.1 如何进行故障排除5.2 常见问题及解决办法第六章: 附件6.1 配送清单6.2 附件列表法律名词及注释:1:版权法:保护原创作品的法律法规,防止他人擅自复制、修改或传播作品。
2:商标法:保护商标的法律法规,防止他人擅自使用相同或相似的商标进行商业活动。
3:专利法:保护发明创造的法律法规,防止他人擅自利用发明创造进行生产和销售。
4:侵权:侵犯他人权益的行为,包括侵犯知识产权、商业秘密等。
本文档涉及附件:1:使用手册(附件1)2:编程教程(附件2)3:电池充电器(附件3)本文所涉及的法律名词及注释:1:版权法:保护原创作品的法律法规,防止他人擅自复制、修改或传播作品。
2:商标法:保护商标的法律法规,防止他人擅自使用相同或相似的商标进行商业活动。
3:专利法:保护发明创造的法律法规,防止他人擅自利用发明创造进行生产和销售。
4:侵权:侵犯他人权益的行为,包括侵犯知识产权、商业秘密等。
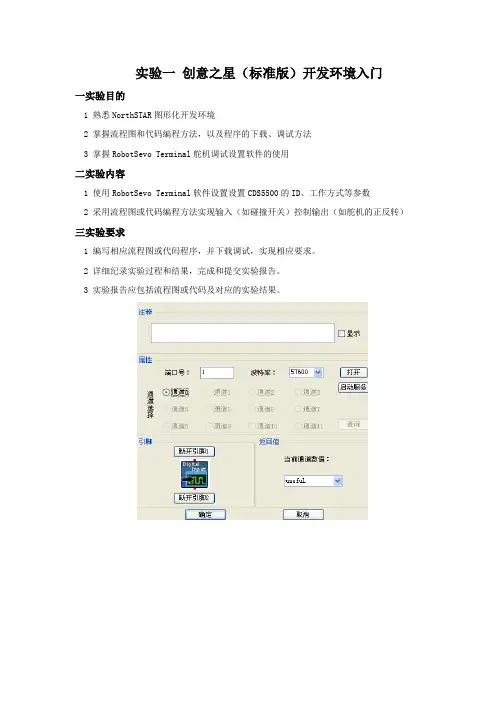
实验一创意之星(标准版)开发环境入门一实验目的1 熟悉NorthSTAR图形化开发环境2 掌握流程图和代码编程方法,以及程序的下载、调试方法3 掌握RobotSevo Terminal舵机调试设置软件的使用二实验内容1 使用RobotSevo Terminal软件设置设置CDS5500的ID、工作方式等参数2 采用流程图或代码编程方法实现输入(如碰撞开关)控制输出(如舵机的正反转)三实验要求1 编写相应流程图或代码程序,并下载调试,实现相应要求。
2 详细纪录实验过程和结果,完成和提交实验报告。
3 实验报告应包括流程图或代码及对应的实验结果。
#include "Apps/SystemTask.h"uint8 SERVO_MAPPING[1] = {5};int main(){int useful = 0;MFInit();MFInitServoMapping(&SERVO_MAPPING[0],1); MFSetPortDirect(0x00000FFE); MFSetServoMode(5,1);while (1){useful = MFGetDigiInput(0);if (useful==1){MFSetServoRotaSpd(5,1000);MFServoAction();}else{MFSetServoRotaSpd(5,0);MFServoAction();}DelayMS(1000);}}实验心得:通过本次实验,我第一次看到了实际中的舵机。
在此之前,我只是在仿真环境之下使用过程序控制舵机。
现在通过小小的程序控制机器人舵机,体会到了实际中的舵机工作情况,并非想象中的那么敏捷和大动作。
这次试验,我学会了如何用图形化编程软件来编程,通过编程可以直接控制舵机,但是里面的工具比较繁多,需要逐个学习才能学好,在以后的学习中要多的去做实验,去学习,和课本知识结合起来,这样才能更好的获得知识。
模块化机器人实验指导书目录实验1机器人的机械系统及单模块运动 (3)实验2 机器人示教编程与再现控制 (8)实验3 机器人的搬运装配实验 (10)实验4 机器人链接库VC编程实验 (12)附录A MAC-3003SSI2运动函数列表 (15)附录B S6S1机器人动态连接库 (18)实验1 机器人的机械系统及单模块运动1.1实验目的1、了解机器人机械系统的组成;2、了解机器人机械系统各部分的原理及作用;3、掌握机器人单模块运动的方法。
1.2实验设备1、模块化机器人一台;2、模块化机器人控制柜一台。
1.3设备介绍本课程所使用的机器人为6自由度模块化可拆卸串联机器人,整体组合后其轴线相互平行或垂直,能够在空间内进行定位,采用伺服电机和步进电机混合驱动,它是一个多输入多输出的动力学复杂系统。
整个系统包括机器人1台、控制柜1台、实验附件1套(包括轴、套)和机器人控制软件1套。
机器人采用模块组合式串联开链结构,即机器人各连杆由旋转关节模块或移动关节模块组合串联连接,如图1-1所示。
各关节轴线相互平行或垂直。
连杆的一端装在固定的支座上(底座),另一端处于自由状态,可安装各种工具以实现机器人作业。
关节的作用是使相互联接的两个连杆产生相对运动。
各模块的传动采用可视化结构,由锥齿轮、同步齿型带和谐波减速器等多种传动结构配合实现。
机器人各模块采用步进电机驱动(模块2采用伺服电机驱动),并通过Windows环境下的软件编程对机器人控制,使机器人任意组合成2~6自由度机器人后能够在工作空间内任意位置精确定位。
图1-1 机器人结构机器人技术参数如表1-1所示。
表1-1 机器人技术参数机器人各模块机械系统主要由以下几大部分组成:原动部件、传动部件、执行部件。
基本机械结构连接方式为原动部件→传动部件→执行部件。
原动部件包括步进电机和伺服电机两大类,模块2采用伺服电机驱动方式,模块1、3、4、5、6采用步进电机驱动方式。
本机器人中采用了同步齿型带传动、谐波减速传动、行星减速传动、锥齿轮传动、涡轮蜗杆等传动方式。
机器人创新实验(3)实验指导书机器人实验室实验一熟悉机器人与C51单片机硬件软件一、实验目的1、掌握宝贝车机器人用C51教学板与计算机硬件连接和宝贝车基本结构;2、熟悉及掌握C51系列单片机Keil uVision IDE(集成开发环境)软件、ISP下载软件及串口调试终端的使用方法。
二、实验设备及软件宝贝车机器人套件、ISP下载线、串行接口线、计算机、电源。
Keil uVision2 IDE集成开发环境、PROGISP1.72下载软件、串口调试软件。
三、实验内容和步骤单片机控制的宝贝车机器人是通过串并口或USB接口通信交互,由硬件系统与软件系统相互结合组成的一个完整的智能控制系统。
单片机必须与外围设备及软件组成一个完整的应用系统(如图1.1)。
1、熟悉宝贝车机器人的结构组成(如图 1.2):小车底板、车轮、教学板、伺服电机、电池盒。
这是宝贝车机器人的硬件系统,它的微控制器(MCU)是由Atmel公司生产与51系列兼容的8位AT89S52单片机。
图1.1单片机应用系统图图1.2采用C51单片机的机器人2、教学板指方便单片机与电源、ISP下载线、串口线以及各种传感器和电机的连接制作的一个电路板(如图1.3)。
将宝贝车机器人与计算机硬件连接,并连接到电源。
连接单片机教学板ISP接口到计算机,以便程序下载;●连接单片机教学板串行接口到计算机,以便调试和交互;●连接机器人到电池或者是供电电源。
USBasp C版通用编程器图1.3 C51单片机教学板3、运用C语言编程,运用编译器编译生成可执行文件并下载到单片机,用串口调试软件查看单片机输出信息。
①建立用户文件夹,方便管理程序,拷入编译所需头文件(例如,将光盘“头文件”文件夹中的文件拷贝到C:\Program Files\Keil\C51\INC文件夹里)。
②进入编程系统(Keil uVision2 IDE):1)新建项目工程(*.uv2):Project→New Project,命名,保存在新建立的用户文件夹内;选择单片机生产公司及类型:Atmel、AT89S52。
创意之星机器⼈套件实验实验⼀熟悉创意之星机器⼈套件实验⼀、实验题⽬熟悉创意之星机器⼈套件实验⼆、实验⽬的1、熟悉创意之星软硬件结构及其编程环境。
2、了解各种机器⼈传感器。
3、熟悉季了解机器⼈执⾏器—舵机。
了解其⼯作原理。
三、实验器材标准版控制器⼀个、外接直流电源⼀个、灰度传感器⼀个、红外接近传感器⼀个、数字舵机⼀个、舵机线两个、多功能调试器⼀个四、实验要求1、认识标准版控制器各部分功能。
2、掌握NorthStar编程环境的基本操作。
3、学会使⽤标准版控制器的IO接⼝。
4、学会使⽤标准版控制器的AD接⼝。
5、学会使⽤标准版控制器的舵机接⼝。
6、学会编写、下载并运⾏简单的程序。
五、实验内容1、熟悉NorthStar软件中各功能模块。
NorthSTAR 是⼀个图形化交互式机器⼈控制程序开发⼯具。
在NorthSTAR 中,通过⿏标的拖动类似逻辑框的控件和对控件做简单的属性设置,就可以快捷的编写机器⼈控制程序。
程序编辑完后,可以编译并下载到机器⼈控制器中运⾏。
从NorthStar的“⽂件”菜单或者⼯具栏选择“新建”,将会弹出⼯程设置对话框,如下图,控制卡选项⾥点选“MultiFlex2-PXA270”,构型选项点选“⾃定义”;点击“下⼀步”按钮进⼊舵机设置。
1、设置舵机ID,控制舵机。
下图为CDS5500 机器⼈舵机:设置舵机个数为2,将ID 为2 的舵机设置为电机模式。
点击“下⼀步”按钮进⼊AD设置:置IO个数为2:点击“完成”完成⼯程设置。
2、通过NorthStar环境查询传感器数据。
结构零件构成了“创意之星”机器⼈的躯体,控制器是“创意之星”机器⼈的⼤脑,⽽传感器就是“创意之星”机器⼈的感知器官:⽪肤、眼睛、⽿朵、⿐⼦和⾆头等等。
传感器能够将机器⼈⾃⾝的电流、电压、位置信息,外部的距离、温度、湿度、光线、声⾳、图像等信息转化为电信号。
传感器内部的电路对这些电信号经过预处理之后转化为能够为控制器所采集或读取的电压、脉冲、数据信号。
(一)实验目的1、了解学习碰撞传感器的使用;2、熟悉机器人套件的搭建;3、掌握创意之星控制器AD口相关函数、LED及LCD 的使用。
(三)实验环境使用舵机(舵机ID为0x01)及L2-5连接件碰撞传感器,当传感器收到碰撞时LED亮,其中LED 接在控制器输出口0,传感器接在AD0口,舵机工作在电机模式,L2-5在转动过程中碰到传感器,立即反向转动,转1s后继续回转。
(四)实验步骤(二)实验要求1、说明及流程;2、编程和下载;3、实验现象;4、实验总结、作业。
1、零件清单详见搭建手册—执行器_LED 红绿灯—零件清单。
2、搭建步骤详见搭建手册—执行器_LED 红绿灯—搭建步骤。
1、说明及流程(1)说明碰撞传感器的输出为开关量,传感器在未受碰撞时输出高电平(4.3V左右),受到碰撞时输出低电平(0V),可通过控制器上的AD 口检测碰撞传感器的信号。
ANA0~ANA15即为控制器上的16个AD 输入口,经过2/3的分压接到了控制器芯片的ADC0~ADC15。
当传感器信号为高电平时AD 值为(((4.3*2)/3)*4096)/3.3=3558。
此例中使用舵机(舵机ID为0x01)及L2-5 连接件碰撞传感器,当传感器收到碰撞时LED 亮,其中LED 接在控制器输出口0,传感器接在AD0 口,舵机工作在电机模式,L2-5 在转动过程中碰到传感器,立即反向转动,转1s后继续回转。
与AD 口相关的函数有:u16 UP_ADC_GetValue(u8 Channel)//此函数为读取对应AD口的电压值,Channel 为AD 口的通道号0~15。
u8 UP_ADC_GetIO(u8 Channel)//此函数为将AD口的输入转换为开关量,当AD口采样值大于500时函数返回1,小于等于500 时输出0。
碰撞传感器接在控制器的AD0 口,LED 灯接在GPIO0,舵机工作在电机模式,ID 固定为0x01。
2、编程和下载(1)Keil 方式示例程序详见实验指导书2.2.6。
机器人创新实验三机器人名称:仿生蛇形机器人四足爬行机器人实验目的:①加强对运动中的“创意之星”四足爬行机器人重心变化的理解和认识,将“创意之星”机器人套件进行搭建和装配,构建出一个“创意之星”四足爬行机器人。
②了解仿生蛇形机器人的概念,仿生蛇形机器人的动作规划,步态规划的基本知识。
③在保证整个稳定的前提下,将程序写入控制卡,熟悉UP-MRcommander 软件调试机器人运动步态的技巧,熟悉直流电机的控制,并实现提前设定好的动作步骤,并使机器人能够平稳的爬行。
④熟悉掌握各种搭建元件的使用方法和电机舵机的使用技巧。
⑤学会对学习知识的应用到实际中的能力,提高自身动手能力。
实验任务:设计并实现完整的机器人系统,如四足爬行机器人、挖掘机器人、仿生蛇形机器人等,以“创意之星”模块化机器人教学套件为实验平台。
设计方案:应用创意之星模块化机器人教学套件组装仿生蛇形机器人,UP-MRcommander软件对动作控制实现机器人运动:用四足爬行机器人,并实现前行动作,左前右后向前,左后右前向后,然后左前右后向后,左后右前向前,便能实现四足爬行机器人前行。
了解:博创科技刚刚推出了最新的UP-InnoSTAR™ 创意之星™机器人套件产品,以替换上一代“创意之星”产品。
该套件是一套用于开展机器人创新实验的模块化机器人套件。
熟悉四足爬行机器人向前爬行时的运动方式和运动特点。
熟悉舵机动力关节、基本结构件、控制卡、直流电机、传感器、UP-MRcommander,掌握搭建和调试要领。
实验过程:本实验共分为12学时,分为3个阶段。
第一阶段:老师对我们介绍实验内容,对需要用到的配件、软件环境进行讲解,为使我们对实验内容更加熟悉,对软件环境的熟悉。
第二阶段:开始动手阶段,为了能使我们更好的完成创新实验课程,首先进行了对“创意之星”仿生蛇形机器人必备配件舵机的装配工作。
图1 图2 图3完成整机装配:完成一个关节之后,重复上述过程,再完成其余的4 个关节。
创意之星模块化机器人实验指导书电子科技大学机械电子工程学院工程训练中心目录实验一 MULTIFLEX控制卡编程实验 (1)实验二多自由度串联式机械手 (9)实验三简易四足机器人 (15)实验四轮式机器人运动控制实验 (20)实验五机器人传感系统实验 (25)实验六自主避障机器人实验 (28)实验七追光的机器爬虫 (37)实验八开放性实验:设计自己的机器人 (46)实验一MultiFLEX控制卡编程实验一实验目的1.了解MultiFLEX控制卡的基本结构;2.了解WinA VR+A VRStudio编译环境的使用;3.了解C 语言环境下编写控制程序,并编译、下载到MultiFLEX 控制器中执行的流程4.熟悉关于A VR 单片机的I/O口有关的寄存器的概念、作用5.理解函数gpio_mode_set(),write_gpio(),read_gpio()的定义,掌握其用法6.熟悉并掌握利用5中的3 个函数控制MultiFLEX 控制卡的16 路IO 口二实验原理A VR 单片机与I/O 口有关的寄存器有3 个:PORTX,DDRX,PINX(X 为端口编号)。
DDRX 说明X 端口的输入输出状态,例如:如PORTA=0x0F=0000 1111,则引脚PA0-PA3均为输出(1 为输出),引脚PA4-PA7 均为输入(0 为输入)。
PORTX 说明X 端口的输入输出的具体信息,例如:当PORTA=0x0F 时,若PORTA=0X33=00110011,则引脚PA0、PA1 为输出,且输出信号为高(1);引脚PA2、Pa3 为输出,但输出信号为低(0);PA4、PA5 为输入且输入有效;至于PA6、PA7 虽然DDRA 已经将其设置为输入,但是PORTA 使其输入无效,所以PA6、PA7 的输入信号读不出来。
PINX 为输入端口的具体信息(PINX 只能读取不能写入),例如:当DDRA=0x0F,PORTA=0x33时,如果读取PINA 即char temp=PINA,则temp=--XX0011,其中为输入的引脚只有PA4-PA7,PA4 与PA5 状态为XX,X 为输入信号,而PA6、PA7 的输入为--,-为一个不确定的数。
机器人创新实验指导书1. 简介机器人创新实验是一项创造性的实践活动,旨在培养学生的动手能力、创新意识和解决问题的能力。
通过设计、搭建、编程和测试机器人模型,学生可以深入了解机器人技术的原理和应用,并能够运用所学知识解决现实生活中的问题。
本指导书将帮助学生理解机器人创新实验的基本概念和步骤,提供详细的实验指导,并引导学生进行创新思考和进一步改进。
2. 实验准备在进行机器人创新实验之前,需要做好以下准备工作:2.1 材料准备准备以下材料:•机器人平台(如Lego Mindstorms EV3套装)•传感器模块(如触碰传感器、颜色传感器等)•电池组•电脑或智能设备•编程软件(如Lego Mindstorms EV3软件)2.2 知识储备在进行机器人创新实验之前,建议学生具备以下基础知识:•了解机器人的基本原理和组成部分•掌握基本的编程概念和语法•熟悉机器人的传感器和执行器的使用方法•具备基本的问题解决能力和创新思维3. 实验步骤3.1 确定实验目标在进行机器人创新实验之前,需要确定实验的目标和问题。
学生可以根据自己的兴趣和实际需求确定一个具体的问题,如设计一个能够自动清扫房间的机器人。
3.2 设计机器人模型根据实验目标和问题,学生需要设计一个机器人模型。
可以根据实际需要选择合适的机器人平台和传感器模块,并根据功能需求设计机器人的结构和布局。
3.3 搭建机器人模型根据设计的机器人模型,学生需要将机器人模型搭建起来。
根据机器人平台的说明书和教程,按照设计进行搭建,确保机器人结构的稳定和可靠。
3.4 编程控制利用编程软件,学生需要编写机器人的控制程序。
根据实验目标和问题,学生可以利用传感器的输入和执行器的输出,编写控制程序来实现所需功能。
可以使用编程软件提供的图形化编程界面或文本化编程界面来编写程序。
3.5 测试和调试在完成编程后,学生需要进行测试和调试。
测试时,学生可以通过手动操控机器人或设定一些测试场景来检查机器人的功能和性能。
电子科技大学“创意之星”模块化机器人实验机械电子工程学院2010 年3 月目录实验一MULTIFLEX控制卡编程实验 (1)实验二多自由度串联式机械手 (10)实验三简易四足机器人 (15)实验四轮式机器人运动控制实验 (19)实验五机器人传感系统实验 (24)实验六自主避障机器人实验 (27)实验七追光的机器爬虫 (37)实验八开放性实验:设计自己的机器人 (48)实验一MultiFLEX 控制卡编程实验实验目的(1)了解MultiFLEX控制卡的基本结构;(2)了解WinAVR+AVRStudio编译环境的使用;(3)了解C 语言环境下编写控制程序,并编译、下载到MultiFLEX 控制器中执行的流程(4)熟悉关于AVR 单片机的io 口有关的寄存器的概念、作用(5)理解函数gpio_mode_set(),write_gpio(),read_gpio()的定义,掌握其用法(6)熟悉并掌握利用2 中的3 个函数控制MultiFLEX 控制卡的16 路IO 口实验环境:UP-MRcommander 控制软件实验器材:计算机1台MultiFLEX 控制卡1块控制卡电源线1根串口下载线1根232电缆1根USB转232电缆1根舵机4个舵机延长线4根实验步骤1 WinAVR 以及AVRStudio 软件的安装首先大家打开实验指导书配套光盘,在“MultiFLEX 控制卡\AVR MCU 开发资料”目录下,打开“WinAVR”文件夹,双击“WinAVR-20060421-install.exe”完成WinAVR 的安装;然后打开“AVR Studio”文件夹,根据文件夹里面的安装说明进行AVRstudio 的安装,并将其升级到最新版本。
注意:请先安装WinAVR 再安装AVRStudio,这样WinAVR 才能自动嵌入到AVRStudio 中。
2 用3AVRStudio 建立一个工程首先打开我们刚刚安装好的AVRStudio,会出现如下窗口:点击选框1 中的按钮可以新建一个工程,点击选框2 中的按钮可以打开一个工程,选框3 是最近你所打开的文件,你可以选中快速将其打开。
在这里,我们点击1(NewProject),会出现如下窗口:在此窗口中我们可以设置关于新工程的一些基本信息。
在选框1(Projec tType)中,第一项AtmelAVRAssembler 指汇编工程文件,第二项AVRGCC 指建立后的文件为C 语言工程文件,在此我们选择AVRGCC(如果没有安装WinAVR 则此处不会出现AVRGCC 选项)。
在选框2 中,我们可以确定工程名(Project name)以及初始文件名(Initial file),在此我们不妨均取名为test。
在选项框3 中,我们可以确定工程所在的文件夹位置,在此我们不妨将路径设为D:\test。
在选项卡2 中如果选中Create folder,则会在3 中确定的文件夹中新建一个以工程名为文件夹名的文件夹,所有与该工程有关的文件会放在此文件夹内;在选项卡2 中选中Create initial file 会生成一个初始.c 文件,方便我们编写程序。
以上设定完成后我们点击Next 进行下一步设置,会弹出如下窗口:在此窗口中我们可以设置一些关于计算机调试的一些信息。
在选项框1 之中我们设置程序调试平台,在此我们选择AVRSimulator。
在选项框2 中我们可以选择单片机类型,你可以根据实际需要选择,在此我们选择ATmega128(本实验以创意之星控制板为平台,所以选择创意之星的控制核心ATmega128,AVRStudio 可以进行软件模拟单片机的运行过程,但本书中不作介绍)。
选择完成后我们点击Finish,这样一个新工程就初步建立了。
然后会出现如下窗口。
其中选框1 为菜单栏,选框2 为工具栏,选框3 为工程管理树,选框4 为程序编辑栏,选框5 为编译信息栏。
作为我们的第一个代码实验,我们可在选框4 中输入如下程序:#include <avr/io.h>#define BEEP_ON PORTG |= _BV(PG3)#define BEEP_OFF PORTG &= ~_BV(PG3)int main(void){int i,j;PORTG = 0;DDRG = 0xff;while(1){for(i=0;i<0xFF;i++){for(j=0;j<0xFF;j++);}BEEP_ON;for(i=0;i<0xFF;i++){for(j=0;j<0xFF;j++);}BEEP_OFF;}}然后在菜单栏选择“Project——》Configuration Options”会弹出如下窗口:在控制核心工作频率(Frequency)一栏输入14745600,由于创意之星采用的晶振是此频率,故如此设置。
其他选项均采用默认设置即可,然后点击确定。
保存文件,然后在菜单栏选择“Build——》Build”(或者按F7),如下图所示:在编译信息栏会出现相应的编译信息,显示是否有错误,其中显示“Build succeeded with 0 Warnings…”说明我们编译正常通过,这时,在我们当初设置的工程所在的文件夹的default 文件夹“D:\test\test\default”里会出现很多新文件,这些都是程序编译的结果,其中有个test.hex 文件是程序烧写文件,将这个文件经过烧录软件下载至MultiFLEX 控制板后程序就能运行,至于如何烧写我们将在后面进行介绍。
3 将*.hex 文件烧录至MultiFLEX 控制卡中首先我们要安装烧写软件PonyProg2000,打开实验指导书配套光盘,在“\MultiFLEX 控制卡\AVR MCU 开发资料\ponypro ”目录下,运行ponyprogV206f.exe,安装完毕后运行,有两个提示会出现,都选择确认,最终正确运行的PonyProg2000 如下图所示:首先我们应该对软件进行总线时序校准,在Setup 中选择Calibration 即可。
然后进行下载方式设置,点击“Setup——》InterfaceSetup”5“创意之星”模块化机器人实验会出现如下窗口:由于“创意之星”配置的是并行下载线,所以我们应该选择Parallel,在下拉选项中选择AvrISPI/O,如上图所示,其他选项按其默认设置,不予更改,然后点击“OK”完成设置。
然后我们进行目标芯片的选择:点击“Device——》AVR micro”,在弹出的选项框中选择ATmega128,如下图所示,这样我们就完成了目标芯片的选择。
现在我们用并口下载线将电脑和MultiFLEX 控制卡进行连接。
下图是“创意之星”提供的并口下载线以及其线序:6下图是MultiFLEX 控制卡的功能区域图,将下载线的5 针插头与其中的H 区的5 针插头相连接,注意线序连接完成后给控制卡通上电源(程序烧写过程中不允许断电,请确保电源的可靠性)。
然后在刚才打开的PonyProg2000 中点击“File——》Open Device File”或者点击图标打开我们前面生成的test.hex 文件(应该在“D:\test\test\default”文件夹中),然后点击“Command——》Write All”或者点击图标,然后程序就会开始烧写至控制卡里面。
当PonyProg2000 显示烧写成功时我们的第一个实验程序就顺利的烧写进MultiFLEX 控制卡中了,正常情况下我们会听到控制卡蜂鸣器发出急促的“嘟嘟嘟”的声音,如果没有任何现象请你检查以上步骤是否按要求完成或者检查下载线有没有插反、控制卡是否正常供电,修改有问题的地方后再生成hex 文件进行烧录,直至蜂鸣器出现规则的嘟嘟声为止。
4 编写C 程序实现对16 路I/O 口的控制I/O 口(In/Out 口)是数字电路的重要组成部分之一,通过I/O 口,我们可以控制端口的电平变化,也可以对端口的电平信息进行读取。
在机器人人领域对I/O 口的操作更是无处不在,那么针对创意之星的MultiFLEX 控制卡我们怎么通过编写c 与程序对其I/O 口进行操作呢,我们将在本小节对其进行介绍。
首先我们来简单了解一下AVR 单片机与I/O 口有关的寄存器。
AVR 单片机与I/O 口有关的寄存器有3 个:PORTX,DDRX,PINX(X 为端口编号)。
DDRX 说明X 端口的输入输出状态,例如:如PORTA=0x0F=0000 1111,则引脚PA0-PA3均为输出(1 为输出),引脚PA4-PA7 均为输入(0 为输入)。
PORTX 说明X 端口的输入输出的具体信息,例如:当PORTA=0x0F 时,若PORTA=0X33=00110011,则引脚PA0、PA1 为输出,且输出信号为高(1);引脚PA2、Pa3 为输出,但输出信号为低(0);PA4、PA5 为输入且输入有效;至于PA6、PA7 虽然DDRA 已经将其设置为输入,但是PORTA 使其输入无效,所以PA6、PA7 的输入信号读不出来。
PINX 为输入端口的具体信息(PINX 只能读取不能写入),例如:当DDRA=0x0F,PORTA=0x33时,如果读取PINA 即char temp=PINA,则temp=--XX0011,其中为输入的引脚只有PA4-PA7,PA4 与PA5 状态为XX,X 为输入信号,而PA6、PA7 的输入为--,-为一个不确定的数。
方便大家看懂源程序,对于MultiFLEX 控制卡,我们已经在系统程序里面进行了处理,同学们只需要调用相关的函数即可对控制卡的IO0-IO15 这16 个引脚进行控制。
实验准备:1.控制卡的IO0-I03 分别与4 个LED 灯连接2.控制卡的I015 与1 个碰撞传感器(实质上是一个开关)连接3.控制卡与电脑之间用并口下载线正确连接4.控制卡电源线正确连接实验程序:#include "Public.h"#include "Usertask.h"void user_task(void){uint8 io_in; uint8io_out;uint8 temp8; uint16temp16;gpio_mode_set(0x00FF);write_gpio(0xFF00);while(1){temp16 = read_gpio();io_in = (uint8)(temp16>>8);temp8=(io_in&0x80);if(temp8==0){ io_out=0x01;while(io_out){write_gpio(~((uint16)io_out));delay(5);//延时5×20MS=0.1sio_out<<=1;write_gpio(~((uint16)io_out));delay(5);}}else write_gpio(0xFF00);}}实验总结整个实验的运行结果应为:当开关(碰撞传感器)未按下时,所有LED 灯点亮,当开关持续按下时,led 灯循环点亮。