ansys中的静力分析
- 格式:doc
- 大小:424.00 KB
- 文档页数:17

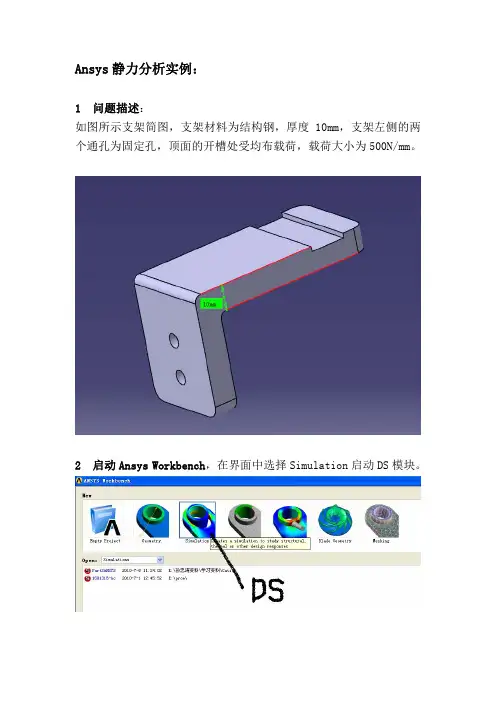
ANSYS静⼒分析的简单步骤第⼀步,启动⼯作台软件,然后选择与启动DS模块弹出得界⾯。
第⼆步,导⼊三维模型。
根据操作步骤进⾏。
⾸先,单击“⼏何体”,选择“⽂件”,然后选择弹出窗⼝中的3D模型⽂件,如果当时catia⽂件格式不符,可以把三维图先转换为“.stp”的格式,即可导⼊。
第三步,选择零件材料:⽂件导⼊软件后,在这个时候,依次选择“⼏何”下的“零件”,并且在左下⾓的“Details of ‘Part’”中以调整零件材料属性,本次钟形壳的材料是刚。
第四步,划分⽹格:选择“Project”树中的“Mesh”,右键选择“Generate Mesh”即可在这⼀点上,你可以在左下⾓的“⽹格”对话框的细节调整⽹格的⼤⼩(体积元)。
第五步,添加类型分析:第⼀选择顶部⼯具栏上的“分析”按钮,添加需要的类型分析,因为我们需要做的是在这种情况下的静态分析。
所以选择结构静⼒。
第六步,添加固定约束:⾸先选择“Project”树中的“Static Structural”按钮,右键点击⽀持插⼊固定树。
这时候在左下⾓的“Details of ‘Fixed Support’”对话框中“Geometry”会被选中,会要求输⼊固定的⽀撑⾯。
在这种情况下,固定⽀架的类型是表⾯⽀持,确定六凹⾯(此时也可点击“Edge”来确定“边”)。
然后⼀直的按住“CTRL”键,连续选择其它⼏个弧⾯为⽀撑⾯,在点击“Apply”进⾏确认,第七步,添加载荷:选择“Project”树中的“结构静⼒”,右键选择“Insert”中的“Force”,然后在选择载荷的作⽤⾯,再次点击“Apply”按钮进⾏确定。
第⼋步,添加变形:右键点击选择“Project”树中的“Solution”,随后依次选择插⼊,变形,Total”,添加变形。
第九步,添加等效应变:右键单击“项⽬”的树,“>插⼊应变->解决⽅案->添加等效,等效应变。
第⼗步,添加等效应⼒:⾸先右键点击“Project”树中的“Solution—>Insert —> Stress—>Equivalent”,添加等效应⼒。
Workbench -Mechanical Introduction第四章静力结构分析概要Training Manual •本章,将练习线性静力结构分析,模拟过程中包括:A.几何和单元B.组件和接触类型C.分析设置D.环境,如载荷和约束环境如载荷和约束E.求解模型F.结果和后处理•本节描述的应用一般都能在ANSYS DesignSpace Entra或更高版本中使用。
–尽管本章中讨论的一些选项可能需要更高级的许可,但都给了提示。
线性静态结构分析基础Training Manual •对于一个线性静态结构分析(Linear Static Analysis),位移{x}由下面的矩阵方程解出:[]{}{}FK=x假设:–[K] 是一个常量矩阵[K]是个常量矩阵•假设是线弹性材料行为•使用小变形理论可能包含些非线性边界条件•可能包含一些非线性边界条件–{F}是静态加在模型上的•不考虑随时间变化的力•不包含惯性影响(质量、阻尼)•记住关于线性静态结构分析的假设是很重要的。
非线性静态分析和动态分析在后面章节讲解。
A. 几何模型Training Manual •在结构分析中,可能模拟各种类型的实体。
•对于面实体,在Details of surface body中一定要指定厚度值。
•线实体的截面和方向,在DesignModeler里进行定义,并自动导入到Simulation(模拟)中。
… 质量点Training Manual •在模型中添加一个质量点来模拟结构中没有明确建模的重量体:–质量点只能和面一起使用。
–它的位置可以通过下面任一种方法指定:•用户自定义的坐标系中指定(x,y,z)坐标值•通过选择顶点/边/面指定位置–质量点只受包括加速度、重力加速度和角加速度的影响。
–质量是与选择的面联系在一起的,并假设它们之间没有刚度。
–不存在转动惯性… 材料特性Training Manual •在线性静态结构分析中需要给出杨氏模量和泊松比:–在Engineering Data中输入材料参数–存在惯性时,需要给出材料密度存在惯性时需要给出材料密度–当施加了一个均匀的温度载荷时,需要给出热膨胀系数在均匀度载荷条件下不需要指定导热系数–在均匀温度载荷条件下,不需要指定导热系数–想得到应力结果,需要给出应力极限–进行疲劳分析时需要定义疲劳属性•在许可协议中需要添加疲劳分析模块B. 组件–实体接触Training Manual •在导入实体装配体时,在实体之间会自动创建接触对。
ANSYS结构分析指南第二章结构线性静力分析2.1 静力分析的定义静力分析计算在固定不变载荷作用下结构的响应,它不考虑惯性和阻尼影响--如结构受随时间变化载荷作用的情况。
可是,静力分析可以计算那些固定不变的惯性载荷对结构的影响(如重力和离心力),以及那些可以近似为等价静力作用的随时间变化载荷(如通常在许多建筑规范中所定义的等价静力风载和地震载荷)的作用。
静力分析用于计算由那些不包括惯性和阻尼效应的载荷作用于结构或部件上引起的位移、应力、应变和力。
固定不变的载荷和响应是一种假定,即假定载荷和结构响应随时间的变化非常缓慢。
静力分析所施加的载荷包括:外部施加的作用力和压力稳态的惯性力(如重力和离心力)强迫位移温度载荷(对于温度应变)能流(对于核能膨胀)关于载荷,还可参见§2.3.4。
2.2 线性静力分析与非线性静力分析静力分析既可以是线性的也可以是非线性的。
非线性静力分析包括所有类型的非线性:大变形、塑性、蠕变、应力刚化、接触(间隙)单元、超弹性单元等。
本章主要讨论线性静力分析。
对非线性静力分析只作简单介绍,其详细论述见《ANSYS Structural Analysis Guide》§8。
2.3 静力分析的求解步骤2.3.1 建模首先用户应指定作业名和分析标题,然后通过PREP7 前处理程序定义单元类型、实常数、材料特性、模型的几何元素。
这些步骤是大多数分析类型共同的,并已在《ANSYS Basic Analysis Guide》§1.2 论述。
有关建模的进一步论述,见《ANSYS Modeling and Meshing Guide》。
2.3.1.1 注意事项在进行静力分析时,要注意如下内容:1、可以采用线性或非线性结构单元。
2、材料特性可以是线性或非线性,各向同性或正交各向异性,常数或与温度相关的:必须按某种形式定义刚度(如弹性模量EX,超弹性系数等)。
对于惯性载荷(如重力等),必须定义质量计算所需的数据,如密度DENS。
ANSYS的有限元静力和模态分析1 前言我国土地辽阔,水资源丰富,可以开发的水电容量约为3.78亿KW,据世界第一位。
目前我们已经修建了如三峡、小浪底等大型水利水电工程,而这些工程也在我国经济建设中发挥了巨大的作用。
建国以来,随着技术的提高,各种各样型式的重力坝在坝工设计中占了很大的比重。
重力坝是一种主要依靠坝体自重产生的抗滑力来维持自身稳定的坝型。
近年来,混凝土重力坝在重力坝中所占的比重越来越大。
混凝土重力坝以具有安全可靠,耐久性好,抵抗渗漏、设计和施工技术简单,易于机械化施工、对不同的地形和地质条件适应性强等优点而被广泛应用[1]。
但由于许多坝都是建立在地震多发和高烈度地区,一旦遭到破坏将会带来难以估计的经济和损失,因此对大坝做模态分析,计算分析它的固有频率和振型,为重力坝的抗震稳定性分析奠定基础。
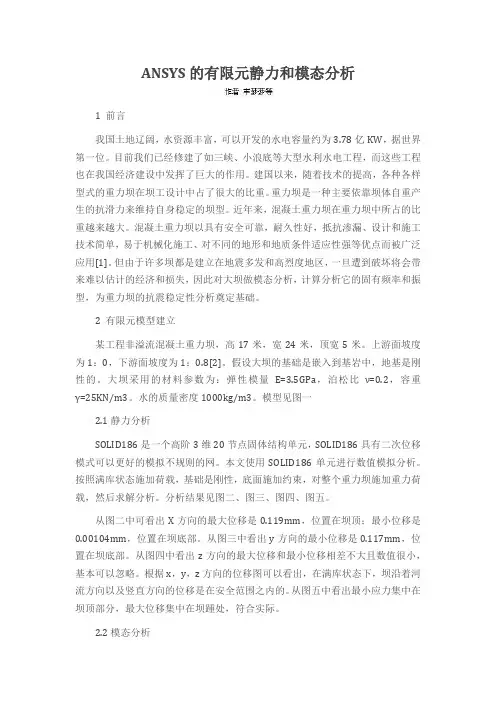
2 有限元模型建立某工程非溢流混凝土重力坝,高17米,宽24米,顶宽5米。
上游面坡度为1:0,下游面坡度为1:0.8[2]。
假设大坝的基础是嵌入到基岩中,地基是刚性的。
大坝采用的材料参数为:弹性模量E=3.5GPa,泊松比ν=0.2,容重γ=25KN/m3。
水的质量密度1000kg/m3。
模型见图一2.1静力分析SOLID186是一个高阶3维20节点固体结构单元,SOLID186具有二次位移模式可以更好的模拟不规则的网。
本文使用SOLID186单元进行数值模拟分析。
按照满库状态施加荷载,基础是刚性,底面施加约束,对整个重力坝施加重力荷载,然后求解分析。
分析结果见图二、图三、图四、图五。
从图二中可看出X方向的最大位移是0.119mm,位置在坝顶;最小位移是0.00104mm,位置在坝底部。
从图三中看出y方向的最小位移是0.117mm,位置在坝底部。
从图四中看出z方向的最大位移和最小位移相差不大且数值很小,基本可以忽略。
根据x,y,z方向的位移图可以看出,在满库状态下,坝沿着河流方向以及竖直方向的位移是在安全范围之内的。
ANSYS WORKBENCH 11.0培训教程(DS)第四章静力结构分析序言•在DS中关于线性静力结构分析的内容包括以下几个方面:–几何模型和单元–接触以及装配类型–环境(包括载荷及其支撑)–求解类型–结果和后处理•本章当中所讲到的功能同样适用与ANSYS DesignSpace Entra及其以上版本.–本章当中的一些选项可能需要高级的licenses,但是这些都没有提到。
–模态,瞬态和非线性静力结构分析在这里没有讨论,但是在相关的章节当中将会有所阐述。
线性静力分析基础•在线性静力结构分析当中,位移矢量{x} 通过下面的矩阵方程得到:在分析当中涉及到以下假设条件:–[K] 必须是连续的•假设为线弹性材料•小变形理论•可以包括部分非线性边界条件–{F} 为静力载荷•不考虑随时间变化的载荷•不考虑惯性(如质量,阻尼等等)影响•在线性静力分析中,记住这些假设是很重要的。
非线性分析和动力学分析将在随后的章节中给予讨论。
[]{}{}F x K =A. 几何结构•在结构分析当中,可以使用所有DS 支持的几何结构类型.•对于壳体,在几何菜单下厚度选项是必须要指定的。
•梁的截面形状和方向在DM已经指定并且可以自动的传到DS模型当中。
–对于线性体,仅仅可以得到位移结果.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional xStructural xMechanical/Multiphysics x…Point Mass•Point Mass 在“Geometry”分支在模拟没有明确建模的重量–只有面实体才能定义point mass–可以用以下方式定义point mass位置:•在任意用户定义坐标系中(x, y, z)坐标•选择点/边/面来定义位置–重量/质量大小在“Magnitude”中输入–在结构静力分析中,point mass只受“加速度”,“标准重力加速度,”和“旋转速度”的作用.–质量和所选面相连通时它们之间没有刚度. 这不是一个刚度区域假设而是一个类似与分布质量的假设–没有旋转惯性项出现.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional x…Point Mass•point mass 将会以灰色圆球出现–前面提到,只有惯性力才会对point mass 起作用。
定义单元类型:Main menu | preprocessor |Element Type |Add/Edit/Delete命令出现Element Types 对话框,单击Add按钮,出现Library of Element Types 对话框。
在列表框中,选择单元类型,然后单击OK。
定义材料性能参数:选择Main menu |preprocessor | Material props |Material Models 命令,出现Define Material Model Behavior 对话框。
在Material Models Available 一栏中依次双击Structural、Linear、Elastic、isotropic 选项。
在EX输入栏中输入(弹性模量)2.2E11,(2.2E11=220Gpa)在PRXY中输入(泊松比)0。
3单击OK关闭对话框。
创建几何模型,划分网格:选择Utility Menu | file |import 导入有限元模型。
通过Main menu | preprocessor | Modeling |create |point/line.。
给有限元模型添加相关的重要的点和线。
选择Main menu |preprocessor |Meshing |Mesh tool |勾选Smart Size ,然后在下拉菜单Mesh中选择V olumes,然后单击凸起按钮Mesh | 弹出选择对话框,用鼠标选取有限元模型,使得整个模型变色后单击OK开始网格划分,划分结束后关掉弹出的多余对话框。
运行计算:Main menu |Solution |analysis Type | New Analysis |选择static 单击OKMain menu | Solution |Define Loads |Apply |Structural | Displacement |On Nodes/point/line/area.。
ANSYS WORKBENCH 11.0培训教程(DS)第四章静力结构分析序言•在DS中关于线性静力结构分析的内容包括以下几个方面:–几何模型和单元–接触以及装配类型–环境(包括载荷及其支撑)–求解类型–结果和后处理•本章当中所讲到的功能同样适用与ANSYS DesignSpace Entra及其以上版本.–本章当中的一些选项可能需要高级的licenses,但是这些都没有提到。
–模态,瞬态和非线性静力结构分析在这里没有讨论,但是在相关的章节当中将会有所阐述。
线性静力分析基础•在线性静力结构分析当中,位移矢量{x} 通过下面的矩阵方程得到:在分析当中涉及到以下假设条件:–[K] 必须是连续的•假设为线弹性材料•小变形理论•可以包括部分非线性边界条件–{F} 为静力载荷•不考虑随时间变化的载荷•不考虑惯性(如质量,阻尼等等)影响•在线性静力分析中,记住这些假设是很重要的。
非线性分析和动力学分析将在随后的章节中给予讨论。
[]{}{}F x K =A. 几何结构•在结构分析当中,可以使用所有DS 支持的几何结构类型.•对于壳体,在几何菜单下厚度选项是必须要指定的。
•梁的截面形状和方向在DM已经指定并且可以自动的传到DS模型当中。
–对于线性体,仅仅可以得到位移结果.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional xStructural xMechanical/Multiphysics x…Point Mass•Point Mass 在“Geometry”分支在模拟没有明确建模的重量–只有面实体才能定义point mass–可以用以下方式定义point mass位置:•在任意用户定义坐标系中(x, y, z)坐标•选择点/边/面来定义位置–重量/质量大小在“Magnitude”中输入–在结构静力分析中,point mass只受“加速度”,“标准重力加速度,”和“旋转速度”的作用.–质量和所选面相连通时它们之间没有刚度. 这不是一个刚度区域假设而是一个类似与分布质量的假设–没有旋转惯性项出现.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional x…Point Mass•point mass 将会以灰色圆球出现–前面提到,只有惯性力才会对point mass 起作用。
ANSYS WORKBENCH 11.0培训教程(DS)第四章静力结构分析序言•在DS中关于线性静力结构分析的内容包括以下几个方面:–几何模型和单元–接触以及装配类型–环境(包括载荷及其支撑)–求解类型–结果和后处理•本章当中所讲到的功能同样适用与ANSYS DesignSpace Entra及其以上版本.–本章当中的一些选项可能需要高级的licenses,但是这些都没有提到。
–模态,瞬态和非线性静力结构分析在这里没有讨论,但是在相关的章节当中将会有所阐述。
线性静力分析基础•在线性静力结构分析当中,位移矢量{x} 通过下面的矩阵方程得到:在分析当中涉及到以下假设条件:–[K] 必须是连续的•假设为线弹性材料•小变形理论•可以包括部分非线性边界条件–{F} 为静力载荷•不考虑随时间变化的载荷•不考虑惯性(如质量,阻尼等等)影响•在线性静力分析中,记住这些假设是很重要的。
非线性分析和动力学分析将在随后的章节中给予讨论。
[]{}{}F x K =A. 几何结构•在结构分析当中,可以使用所有DS 支持的几何结构类型.•对于壳体,在几何菜单下厚度选项是必须要指定的。
•梁的截面形状和方向在DM已经指定并且可以自动的传到DS模型当中。
–对于线性体,仅仅可以得到位移结果.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional xStructural xMechanical/Multiphysics x…Point Mass•Point Mass 在“Geometry”分支在模拟没有明确建模的重量–只有面实体才能定义point mass–可以用以下方式定义point mass位置:•在任意用户定义坐标系中(x, y, z)坐标•选择点/边/面来定义位置–重量/质量大小在“Magnitude”中输入–在结构静力分析中,point mass只受“加速度”,“标准重力加速度,”和“旋转速度”的作用.–质量和所选面相连通时它们之间没有刚度. 这不是一个刚度区域假设而是一个类似与分布质量的假设–没有旋转惯性项出现.ANSYS License AvailabilityDesignSpace Entra xDesignSpace xProfessional x…Point Mass•point mass 将会以灰色圆球出现–前面提到,只有惯性力才会对point mass 起作用。
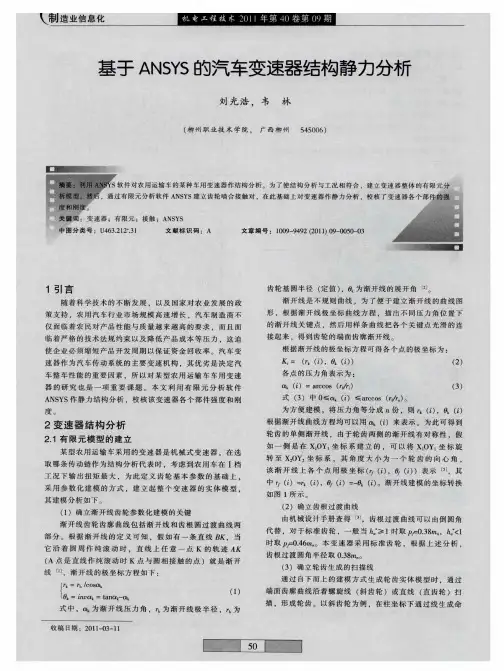
有限元ansys静力分析的一个小例子有限元学院:机电学院专业:姓名:学号:一、问题描述如图所示的平面,板厚为0.01m,左端固定,右端作用50kg的均布载荷,对其进行静力分析。
弹性模量为210GPa,泊松比为0.25.二、分析步骤1(启动ansys,进入ansys界面。
2(定义工作文件名进入ANSYS/Multiphsics的的程序界面后,单击Utility Menu菜单下File中Change Jobname的按钮,会弹出Change Jobname对话框,输入gangban为工作文件名,点击ok。
(定义分析标题 3选择菜单File-Change Title在弹出的对话框中,输入Plane Model作为分析标题,单击ok。
4(重新显示选择菜单Plot-Replot单击该按钮后,所命令的分析标题工作文件名出现在ANSYS中。
5(选择分析类型在弹出的对话框中,选择分析类型,由于此例属于结构分析,选择菜单Main Menu:Preferences,故选择Structural这一项,单击ok。
6(定义单元类型选择菜单Main Menu-Preprocessor-Element Type-Add/Edit/Delete单击弹出对话框中的Add按钮,弹出单元库对话框,在材料的单元库中选Plane82单元。
即在左侧的窗口中选取Solid单元,在右侧选择8节点的82单元。
然后单击ok。
7(选择分析类型定义完单元类型后,Element Type对话框中的Option按钮被激活,单击后弹出一个对话框,在Elenment behavior中选择Plane strs w/ thk,在Extra Element output中,选择Nodal stress,单击close,关闭单元类型对话框。
8(定义实常数选择菜单Main Menu-Preprocessor-Real Constants Add/Edit/Delete执行该命令后,在弹出Real Constants对话框中单击Add按钮,确认单元无误后,单击ok,弹出Real Constants Set Number 1,for Plane 82对话框,在thickness后面输入板的厚度0.01单击ok,单击close。
第1章 静力分析1.1 力的概念力在我们的生产和生活中随处可见,例如物体的重力、摩擦力、水的压力等,人们对力的认识从感性认识到理性认识形成力的抽象概念。
力是物体间的机械作用,这种作用可以使物体的机械运动状态或者使物体的形状和大小发生改变。
从力的定义中可以看出力是在物体间相互作用中产生的,这种作用至少是两个物体,如果没有了这种作用,力也就不存在,所以力具有物质性。
物体间相互作用的形式很多,大体分两类,一类是直接接触,例如物体间的拉力和压力;另一类是“场”的作用,例如地球引力场中重力,太阳引力场中万有引力等。
同时力有两种效应:一是力的运动效应,即力使物体的机械运动状态变化,例如静止在地面物体当用力推它时,便开始运动;二是力的变形效应,即力使物体大小和形状发生变化,例如钢筋受到横向力过大时将产生弯曲,粉笔受力过大时将变碎等。
描述力对物体的作用效应由力的三要素来决定,即力的大小、力的方向和力的作用点。
力的大小表示物体间机械作用的强弱程度,采用国际单位制,力的单位是牛顿(N )(简称牛)或者千牛顿(kN )(简称千牛),1kN =103N 。
力的方向是表示物体间的机械作用具有方向性,它包括方位和指向。
力的作用点表示物体间机械作用的位置。
一般说来,力的作用位置不是一个几何点而是有一定大小的一个范围,例如重力是分布在物体的整个体积上的,称体积分布力,水对池壁的压力是分布在池壁表面上的,称面分布力,同理若分布在一条直线上的力,称线分布力,当力的作用范围很小时,可以将它抽象为一个点,此点便是力的作用点,此力称为集中力。
由力的三要素知,力是矢量,记作F ,本教材中的黑体均表示矢量,可以用一有向线段表示,如图1-1所示,有向线段AB 的大小表示力的大小;有向线段AB 的指向表示力的方向;有向线段的起点或终点表示力的作用点。
1.2 静力学基本原理所谓静力学基本原理是指人们在生产和生活实践中长期积累和总结出来并通过实践反复验证的具有一般规律的定理和定律。
它是静力学的理论基础,且不用加以数学推导。
原理1力的平行四边形法则作用在物体上同一点的两个力,可以合成为一个合力,此合力的大小和方向由此二力矢量所构成的平行四边形对角线来确定,合力的作用点仍在该点。
如图1-2a 所示,F 为1F 和2F 的合力,即合力等于两个分力的矢量和,表达式2F +F =F 1 (1-1)图1-1也可采用三角形法则,如图1-2b 所示,力的平行四边形法则是最简单的力系简化,同时此法则也是力的分解法则。
原理2二力平衡原理作用在刚体上的两个力,使刚体保持平衡的必要和充分条件是:此二力必大小相等,方向相反,且作用在同一条直线上。
如图1-3所示,矢量表示21F =F (1-2)应当指出:二力平衡原理对刚体是必要且充分的,对变形体则是必要的,而不是充分的。
利用此原理可以确定力的作用线位置,例如刚体在两个力作用下平衡,若已知两个力的作用点,则此作用点连线可以确定力的作用线;同时二力平衡力也是最简单的平衡力系。
原理3加减平衡力系原理在作用于刚体的力系中加上或减去任意的平衡力系,并不改变原来力系对刚体的作用。
此原理表明平衡力系对刚体不产生运动效应,其适用条件只是刚体,根据此原理可有下面推论。
推论1力具有可传性将作用在刚体上的力沿其作用线任意移动到其作用线的另一点,而不改变它对刚体的作用效应。
-证明:如图1-4所示,设F 作用在A 点,在其作用线另一点B 点上加上一对沿作用线的二力平衡力1F 和2F 且有F =F =F 21-,则F 、1F 和2F 构成新的力系,由加减平衡力系原理减去F 和2F 构成二力平衡力,从而将F 移动作用线的另一点B 上。
图1-2(a)F 1FF 2 (b)2图1-3加减平衡力系原理=图1-4推论2三力平衡汇交定理刚体在三力作用下处于平衡,若其中两个力汇交于一点,则第三个力必汇交于该点。
证明:如图1-5所示,设刚体在三力1F 、2F 和3F 作用下处于平衡,若1F 和2F 汇交于O 点,将此二力沿其作用线移动汇交点O 处,并将其合成12F ,则12F 和3F 构成二力平衡力,所以3F 必通过汇交点O ,且三力必共面。
==图1-5应当指出,三力平衡汇交定理的条件是必要条件,不是充分条件。
同时它也是确定力的作用线的方法之一,即若刚体在三个力作用下处于平衡,若已知其中两个力的作用线汇交于一点,则第三力的作用点与该汇交点连线为第三个力的作用线,其指向再由二力平衡原理来确定。
原理4作用力与反作用力定律物体间的作用力与反作用力总是成对出现,其大小相等,方向相反,沿着同一条直线,且分别作用在两个相互作用的物体上。
如图1-6所示,C 铰处c F 与c F ′为一对作用力与反作用力BF AyAx(a)(b)图1-6应当指出,作用力与反作用力不是二力平衡力;此定律不但适用于静力学,还适用于动力学。
1.3 约束与约束力从运动的角度将所研究的物体分为两类:一类是物体的运动不受它周围物体的限制,这样的物体称自由体,例如飞机、炮弹、卫星等,另一类是物体的运动受到它周围物体的限制,这样的物体称非自由体,例如建筑结构中的水平梁受到支撑它柱子的限制,火车只能在轨道上行驶等,因此,我们将限制非自由体某种运动的周围物体称约束,上面例子中柱子是水平梁的约束,轨道是火车的约束。
约束是通过直接接触实现的,当物体沿着约束所能阻止的运动方向有运动或运动趋势时,对它形成约束的物体必有能阻止其运动的力作用于它,这种力称为该物体约束力,即约束力是约束对物体的作用,约束力的方向恒与约束所能阻止的运动方向相反。
事实上约束力是一种被动力,与之相对应的力是主动力,即主动地使物体有运动或有运动趋势的力称主动力,例如重力,拉力,牵引力等,工程中将主动力称为荷载。
工程中大部分研究对象都是非自由体,它们所受都的约束是多种多样的,其约束力的形式也多种多样的,因此在理论力学中,将物体所受约束的主要性质保留,忽略次要因素,得到下面几种工程中常见的约束及约束力。
1.3.1光滑面接触约束若物体接触面之间的摩擦可以忽略时,认为接触面是光滑的,这种约束不能限制物体沿接触点公切面的运动,只能阻止物体沿接触点的公法线的运动。
因此,光滑表面接触约束的约束特点是接触点为约束力的作用点,方向沿接触点的公法线,指向被约束的物体,用N F 表示,图1-7a 和图1-7 b 所示。
(a)(b)图1-71.3.2柔体约束工程中绳索、链条、皮带均属此类,约束特点是作用点是接触点,方向沿着柔体背离物体。
如图1-8 a 所示,T F 沿绳索中心线,作用点在接触点A ,指向背离物体;如图1-8b 所示皮带其拉力1T F 、2T F 沿轮的切线,指向背离物体。
(a)(b)图1-8F T2T21.3.3光滑铰链约束光滑铰链约束包括圆柱形铰链、固定铰支座、可动铰支座(滚动铰支座)三种约束。
1.光滑圆柱形铰链约束如图1-9所示将两个物体穿成直径相同的圆孔,用以直径略小的圆柱体(称销子)将两个物体连接上,形成的装置称圆柱形铰链,若圆孔间的摩擦忽略不计为光滑圆柱形铰链,简称铰链。
其约束特点是不能阻止物体绕圆孔的转动,能阻止物体沿圆孔的径向离去的运动,约束力作用点(作用线穿过接触点和圆孔中心,但由于圆孔较小,忽略其半径)在圆孔中心,方向不定,如图1-10所示A F ,用正交分量表示Ax F 、y A F 。
图1-9(b)(a)图1-10(b)(a)2.固定铰支座将上面的圆柱形铰链中的一个物体固定在不动的支撑平面上,形成的装置为固定铰支座如图1-11a 所示,其简图为图1-11b 所示,其约束特点与圆柱形铰链一样。
或(a)(b)图1-11或或3.可动铰支座(滚动铰支座)将上面的圆柱形铰链中的一个物体下面放上滚轴,此装置可在起支撑表面上移动的,且摩擦不计,这样的装置称可动铰支座或滚动铰支座如图1-12a 所示,其简图为图1-12b 所示其约束特点是约束力沿支撑表面的法线,作用线用过铰链中心,指向不定。
或或或(b)(a)图1-121.3.4 链杆约束两端用铰链与其它物体相连,中间不受力的直杆为链杆,其约束特点是约束力的作用线沿链杆轴线,且方向不定。
图1-13和图1-14所示。
B(a)(b)图1-13(a )(b )F AF B图1-141.3.5轴承约束轴承包括向心轴承、止推轴承两种形式。
1.向心轴承轴承是工程中常见的约束如图1-15a 所示,其简图为图1-15b 所示,其约束特点与圆柱形铰链约束相同,常用正交分量表示,如图1-15c Ax F 、y A F 所示。
图1-15(a)(b)(c)Ax2.止推轴承用一光滑的面将向心轴承的一段封闭而形成的装置,称止推轴承,如图1-16a 所示其约束特点是除了具有向心轴承的受力特点以外,还有沿封闭面的法线方向的力,如图1-16b 所示用三个相互垂直的力 Ax F 、y A F 和z A F 表示。
图1-16(a)(b)F1.3.6球铰链约束将固结于物体一端的球体置于球窝形的支座中,就形成了球铰链约束如图1-17a 所示其简图为图1-17b 所示,忽略球体与球窝间的摩擦,其约束特点约束力的作用线沿接触点和球心的连线,指向不定如图1-17b 所示,一般用三个相互垂直的正交分力 Ax F 、y A F 和z A F 表示。
图1-17(a)(b)(c)F以上是工程中几种常见的约束及约束力,这些情况只是工程中的理想约束。
在工程实际的具体问题中,应根据实际的受力特点,将复杂约束通过保留其主要因素忽略次要因素加以简化来实现的。
1.4 物体的受力分析和受力图在力学计算中,首先要分析物体受到哪些力的作用,每个力的作用位置如何,力的方向如何,这个过程称对物体进行受力分析,将所分析的全部力用图形表示出来称画受力图。
正确地对物体进行受力分析和画受力图是力学计算的前提和关键,其步骤如下: (1)确定研究对象,将其从周围物体中分离出来,并画出其简图,称画分离体图。
研究对象可以是一个,也可以是几个物体组成,但必须将它们的约束全部解除。
(2)画出全部的主动力和约束力。
主动力一般是一般已知的,必须画出,不能遗漏,约束反力一般是未知的,要从解除约束处分析,不能凭空捏造。
(3)不画内力,只画外力。
内力是研究对象内部各物体之间的相互作用力,对研究对象的整体运动效应没有影响,因此不画,但外力必须画出,一个也不能少,外力是研究对象以外的物体对该物体的作用,它包括作用在研究对象上全部的主动力和约束力,研究对象的运动效应取决于外力,与内力无关,这一点初学者应当注意。
(4)要正确地分析物体间的作用力与反作用力,当作用力的方向一经假定,反作用力的方向必须与之相反。
当画由几个物体组成的研究对象时,物体间的相互作用力是内力,且成对出现,组成了平衡力系,因此不画内力,若想分析物体间的相互作用力必须将其分离出来,单独画受力图,内力变成外力。