分布式交互仿真
- 格式:doc
- 大小:36.50 KB
- 文档页数:5
dis参数Dis(Distributed Interactive Simulation,分布式交互式仿真)是一种用于模拟和仿真的技术和系统。
它可以模拟多个实体之间的交互和通信,并在分布式系统中进行协同工作。
Dis技术在各个领域都有广泛的应用,包括军事、航空航天、交通、能源等。
Dis技术的核心在于分布式系统的建立和管理。
分布式系统是由多个独立的计算机节点组成的网络,这些节点可以分布在不同的地理位置上。
通过网络通信和协同工作,这些节点可以实现分布式计算和仿真。
Dis技术可以将多个节点连接起来,使它们可以共同运行一个仿真模型,并进行实时的交互和通信。
Dis技术可以模拟和仿真各种实体之间的交互和通信。
这些实体可以是人、物、车辆、飞机等。
在军事领域,Dis技术可以模拟战场上的各种作战单位之间的交互和通信,包括指挥官、士兵、战车、飞机等。
在航空航天领域,Dis技术可以模拟飞机和地面控制中心之间的通信和协同工作。
在交通领域,Dis技术可以模拟车辆之间的交通流和交通规则的执行。
Dis技术还可以实现分布式虚拟现实(Distributed Virtual Reality,DVR)。
通过将多个虚拟现实设备连接到分布式系统中,用户可以在不同的地理位置上共享同一个虚拟环境。
这样,用户可以在不同的地方共同参与一个虚拟体验,而不需要身临其境。
在Dis技术中,数据的同步和共享是一个重要的问题。
由于分布式系统的特性,不同节点上的数据可能会有延迟和不一致性。
为了解决这个问题,Dis技术采用了各种同步和通信机制。
例如,时间同步机制可以确保各个节点上的仿真模型按照相同的时间步进进行更新。
消息传递机制可以实现节点之间的数据传输和交互。
这些机制可以保证分布式系统的协同工作和一致性。
总结起来,Dis技术是一种用于模拟和仿真的技术和系统,它可以模拟多个实体之间的交互和通信,并在分布式系统中进行协同工作。
Dis技术在军事、航空航天、交通、能源等领域都有广泛的应用。
LVC联合仿真系统中关键技术研究摘要:本文围绕LVC联合仿真系统中需要解决的重用和互操作问题进行展开。
通过桥接器和软总线实现仿真模型的重用,通过软总线进行时间推进解决时间一致性问题。
关键词:软总线;重用;互操作;时间推进Research On Key Technology of LVC Simulation SystemCao Xiaoyang,Zhang Bangliang,Chen Kexing(Nanjing Research Institute of Simulation and Technology,Nanjing 210016,China)Abstract:The paper focuses on reuse and interoperation problems in LVC co-simulation system.The bridge and soft bus are used to realizethe reuse of simulation model,and the time consistency problem issolved through the soft bus.Keywords:soft bus;interoperability;reusability;time advance1引言LVC联合仿真是指将真实、虚拟和构建资源联合起来进行的仿真试验。
联合仿真主要解决大规模复杂系统仿真、降低研制费用、缩短研制周期、提高仿真置信度、降低运维难度及成本等问题。
解决上述问题的思路都集中在重用与互操作上,因此研究LVC联合仿真仿真的主要工作是发展和确保仿真中的各种重用和互操作技术。
2分布式仿真LVC联合仿真系统涉及真实、虚拟、构建资源模型之间的数据协同,技术体制众多。
下面介绍几种比较典型的分布式仿真技术。
仿真网络(Simulation Networking,SIMNET)是上个世纪80年代由美国国防部高级研究计划局制定的一项计划,旨在将各类仿真器连接到同一网络,组成一个数据共享的仿真环境。
分布式交互仿真分布式交互仿真(DIS)是一种新兴的仿真技术。
它采用协调一致的结构、标准、协议和数据库,通过局域网和广域网将分散配置的武器装备仿真硬件、软件和仿真环境综合成为一个人可以参与交互作用的时空一致的共用仿真环境。
<br/> 从系统的物理构成来看,DIS系统是由仿真节点和计算机网络组成的。
仿真节点负责实现本节点仿真功能,包括动力学和运动学方程的求解、运动模拟、视景生成及音效合成、特殊效果(烟雾、爆炸和碰撞效果、风雨雷电等自然效果)合成、人机交互等。
分布在不同地域的仿真节点通过计算机网络连接起来,采用局域网、广域网、网关、网桥和路由器等互联设备连接这些节点。
<br/> 从组成单元的性质上看,可把DIS系统划分为以下三类节点: <br/> 虚拟的-包括各种类型的人在回路仿真器的计算机生成兵力,例如,计算机控制的飞机。
<br/> 结构的-包括高层集结模型、模拟军事演习和一些分析模型。
<br/> 真实的-包括实际的靶场和各种真实武器系统和仪表显示系统。
<br/> 分布式交互仿真的特点: <br/> 分布性-地域上分布的各仿真节点用网络连接,以实现共享一个综合环境。
DIS系统在功能和计算能力上也是分布的。
在DIS系统中,没有中央计算机,各仿真节点的地位是平等的。
DIS的各仿真节点具有自治性,即可联网交互运行,也可独立运行。
<br/> 交互式-首先是人在回路中仿真的互操作性,还包括各武器平台之间,武器平台与各种环境之间的交互作用,需要协调一致的结构、标准和协议。
<br/> 仿真性-分布式交互仿真包括三种类型的仿真: <br/> (1)真实仿真由实际的战斗人员使用实际的武器系统和保障系统,在尽可能真的作战环境中进行作战演习。
典型的例子是在美国国家训练中心进行的作战演习。
(2)虚拟仿真由实际作战人员操作仿真的武器系统进行的作战仿真。
160 •电子技术与软件工程 Electronic Technology & Software Engineering数据库技术• Data Base Technique【关键词】通用黑板 分布式 仿真系统分布式交互仿真要求通过采用协调一致的结构,统一的数据标准、协议、数据库,以及局域网或广域网技术,将分散配制的各类仿真器、仿真管理及应用程序进行互联,建立一个无缝的虚拟环境。
每个分布的仿真器对应于仿真虚拟环境中的一个或多个实体。
这就需要一个“数据软总线”,将各类应用挂接在这个数据软总线上,实现数据和信息的实时传输和共享。
挂接在数据软总线上的应用程序必须要有统一的数据交换协议和必要的数据结构。
近些年来出现了基于内存共享的通用黑板GBB (Generic Black-Board )技术,与传统技术架构相比,GBB 在信息共享、协同计算、分布控制等方面性能优异,在业务构造、模型开发、系统集成等方面也有不俗表现,为解决信息实时共享难、业务协同难等问题,提供了一种新的思路方案。
1 通用黑板概念GBB 在20世纪80年代在人工智能研究中提出,最早是用于开发基于黑板结构的专家系统。
基于Common Lisp 和CLOS 的扩展,能为用户提供一个开放式的扩展结构,已在过程控制、设计规划、工作流协同等方面得到应用。
随着技术的不断发展,通用黑板中的核心黑板数据机构在功能和性能上也有了很大的提升。
由于其高效便捷的分布式数据快速共享特点,可以广泛应用于异地分布式、异构信息系统集成,解决海量业务信息的高速共享、快速处理问题。
GBB 是一个通用的数据仓库。
在仿真应用时,它包含了整个仿真执行过程的应用数据,采用共享内存空间机制,使得所有Agent 能够在任何时间访问该数据。
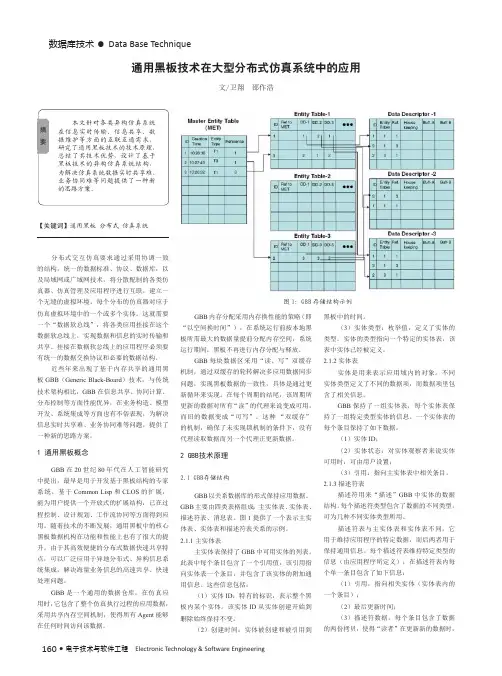
通用黑板技术在大型分布式仿真系统中的应用文/卫翔 邵作浩GBB 内存分配采用内存换性能的策略(即“以空间换时间”),在系统运行前按本地黑板所需最大的数据量提前分配内存空间,系统运行期间,黑板不再进行内存分配与释放。


分布交互式仿真的发展历程和趋势摘要:21世纪信息时代,武器装备、作战方式和手段与以往相比都发生了日新月异的变化。
利用系统分析方法和建模与仿真技术,建立装备应用研究实验室,评估武器装备作战效能,研究和演示验证装备作战使用,优化武器装备使用方案,探索新的作战思想和方法,已成为各国装备发展与应用的必然趋势。
关键词:分布式交互仿真发展趋势1 总体发展历程分布式交互式仿真的发展历程[1~2]如图1所示。
HLA框架已成为分布式交互仿真的主流技术,但随着互联网Internet、Web/Web Service、网格计算(Grid computing)等网络技术的发展,其应用模式和技术内涵得到不断的丰富和扩展。
2 发展中遇到的问题随着Agent理论的逐渐成熟、Agent开发平台的逐渐应用于实际的开发,Agent技术在作战仿真的应用领域也逐渐展开,在国外已成功的应用于一些大型复杂的作战仿真系统,在国内,很多科研院所对Agent应用于作战仿真的理论进行了比较深入的研究,并开发了一些面向Agent的仿真平台,但还没有成熟的大型的面向Agent的作战仿真系统,尤其是Agent应用于装备作战仿真,在理论、建模和软件技术等方面都有很多问题亟待解决。
(1)作战Agent微观理论还有待创新和完善。
经典的BDI模型和VSK模型应用于装备作战仿真存在诸多的问题:传统Agent模型没有显式的描述作战Agent的命令特性,因而无法体现作战主体上下级的强制性和等级特性。
BDM模型采用命令所承载的内容“任务”代替传统模型的意图,体现了作战Agent的强制性,但是,使得作战Agent自身的自治性弱化甚至丧失。
半自治作战Agent体现了作战主体强制性和自治性相结合的特点,但现在还没有一套完整严谨的模型体系对其进行描述。
因此,如何结合传统Agent的微观模型,建立一个作战Agent 微观模型体系,既体现作战主体的强制性又体现其自治性,是Agent技术应用于装备作战仿真的理论基础。
HLA分布式仿真作为系统仿真的一个重要分支,经过SIMNET、DIS、ALSP等阶段,目前已发展到以高层体系结构HLA(High Level Architecture)为核心的一系列技术。
HLA的提出和发展集中体现了现代仿真应用的这些特点和发展规律。
HLA是将仿真功能与通用的支撑系统相分离的一种体系结构,具有开放性、灵活性和适应性。
它同时支持对不同仿真应用的重用,支持用户分布、协同地开发复杂仿真应用系统,并最终降低新应用系统的开发成本和时间。
HLA主要考虑在联邦成员的基础上如何进行联邦集成,即如何设计联邦成员间的交互以达到仿真的目的,它不考虑如何由对象构建成员,而是在假设已有成员的情况下考虑如何构建联邦,这也是把它称为“高级体系结构”的一个重要原因。
HLA的基本思想就是采用面向对象的方法来设计、开发和实现仿真系统的对象模型OM(Object Model),以获得仿真联邦的高层次的互操作和重用。
在HLA中,互操作定义为一个成员能向其他成员提供服务和接受其他成员的服务。
HLA本身并不能完全实现互操作,但它定义了实现联邦成员之间互操作的体系结构和机制。
除了方便成员间的互操作外,HLA还向联邦成员提供灵活的仿真框架。
作为一个开放的、支持面向对象的体系结构,HLA最显著的特点就是通过提供通用的、相对独立的支撑服务程序(RTI),将应用层同底层支撑环境分离,即将仿真功能实现、仿真运行管理和底层通信传输三者分开,使仿真工作者只要集中于仿真功能的开发,而不必再涉及有关网络通信和仿真管理等方面的实现细节。
同时,HLA可实现应用系统的即插即用,易于新的仿真系统的集成和管理,并能根据不同的用户需求和不同的应用目的,实现联邦的快速组合和重新配置,保证联邦范围内的互操作和重用。
1. HLA的组成1.1 HLA基本概念在HLA中,将用于实现某一特定仿真目的的分布仿真系统称为联邦(Federation),它是由若干相互交互的仿真对象模型SOM(Simulation Object Model)、一个共同的联邦对象模型FOM(Federation Object Model)[前两者统称对象模型模板OMT(Object Model Templet)]和运行支撑框架RTI(Runtime Infrastructure)构成的集合。
分布交互仿真技术分布交互仿真技术(Distributed Interactive Simulation Technology)是一种将分布在不同地点的、自治的单一仿真系统,通过计算机网络连接成一个集数学仿真、半实物仿真和人在回路中仿真为一体的、交互式的仿真的技术。
分布交互仿真技术以计算机网络为基础,把分散在不同地点的软硬件设备及有关人员联系起来,生成人工合成的多武器平台这样一种电子环境,从而形成了一种虚拟的作战环境。
它是研究并建立系统的硬件或软件的有效模型,通过模型在实验系统上的运行来研究真实的或假想的动态系统在其所处的环境中的性能的技术。
这一技术的核心是分布、交互和仿真。
分布是指分布交互仿真系统中没有中央计算机,计算能力是分布的,而且,在地理位置上也是分布的,系统各个单元之间可以相隔很远的距离。
交互是指分布交互仿真系统中不同结点之间具有交互作用,人在回路中的仿真系统的互操作性,比如在武器仿真系统中的武器平台(飞机、导弹舰艇等)之间、武器平台与各种环境(地形、大气、海洋等)之间的交互作用。
仿真是指分布交互仿真系统以控制论、系统论、相似原理和信息技术为基础,以计算机为工具,建立系统的计算机模型,对系统进行实验研究。
分布交互仿真技术的发展: 1.>早期的分布交互仿真SIMNET。
80年代初,美国国防高级研究计划局和美国陆军共同制定了一项合作研究计划,即开发一个称为SIMNET的大规模交互战斗仿真网络,将分散在各地的多个地面车辆(坦克、装甲车)仿真器用计算机网络联系起来,用于对坦克乘员(以后推广到包括固定翼飞机和直升机驾驶员)和分队指挥员进行战术训练,也可以对单个武器系统的性能进行研究和评估,从而开创了分布交互仿真技术发展的新阶段。
SIMNET的特征是以分布式交互仿真、计算机综合形成的三维环境和虚拟战斗把成千上万的战斗人员“浸入”到一种由计算机产生的灵镜电子战场。
到1990年,这个系统包括了约260个地面装甲车辆仿真器和飞机飞行模拟器,以及通讯网络、指挥所和数据处理设备,这些设备分布在美国和德国的11个城市 2.>分布交互仿真的标志Digital Information System(DIS)将现代化测量技术和计算机结合,可以直接测量多种物理量(如距离、位移、瞬时速度、平均速度、力、温度、压强、电压、电流强度)的现代化测量仪器。
分布式交互仿真协议书范本甲方(仿真服务提供方):_____________________地址:___________________________________法定代表人:_____________________________联系方式:______________________________乙方(仿真服务使用方):_____________________地址:___________________________________法定代表人:_____________________________联系方式:______________________________鉴于甲方是一家专注于提供分布式交互仿真服务的公司,拥有先进的仿真技术和丰富的实践经验;乙方为一家需要利用仿真技术进行产品测试、培训或其他相关业务的公司。
现甲乙双方本着平等互利、诚实信用的原则,就乙方使用甲方提供的分布式交互仿真服务达成如下协议:第一条服务内容1.1 甲方同意根据本协议的条款和条件,向乙方提供分布式交互仿真服务(以下简称“仿真服务”),包括但不限于仿真环境搭建、仿真模型开发、仿真数据管理等。
1.2 乙方同意按照本协议的约定,接受并使用甲方提供的仿真服务。
第二条服务期限2.1 本协议自双方签字盖章之日起生效,有效期至____年____月____日止。
2.2 如双方同意续签,应至少在协议到期前____天书面通知对方,并签订新的协议。
第三条服务费用及支付方式3.1 乙方应按照本协议附件一《服务费用明细表》所列的费用标准向甲方支付仿真服务费用。
3.2 乙方应在本协议生效后____天内支付首期费用,后续费用按照附件一的约定支付。
3.3 乙方应将费用支付至甲方指定的银行账户,甲方收到款项后应向乙方出具正式发票。
第四条甲方的权利和义务4.1 甲方应保证所提供的仿真服务符合国家相关法律法规的要求,并保证服务质量。
4.2 甲方应按照乙方的需求,及时提供技术支持和咨询服务。
1分布式交互仿真系统DIS的概念分布式交互仿真是一种新兴的仿真技术,它采用协调一致的结构标准、协议和数据库,通过局域网和广域网将地域上分散的、人在回路中的仿真设备和仿真系统有机地联为一个整体,形成一个人可以参与交互作用的、时空一致的、共用的综合仿真环境。
该技术允许为了各自目的而设计的系统、不同时期的技术、不同供应商的产品、不同的服务平台联接在一起,并且允许它们在综合战场环境下进行互操作。
分布式交互仿真包含以下三层含义: 分布(Distributed)———多个仿真器或仿真系统在地理位置上分散,但通过一个通用通信体系结构互相联接在一起。
交互(Interactive)———各个仿真器或仿真系统之间能够通过数据交换模拟实体在实际活动中的互相作用。
仿真(Simulation)———用计算机程序和数据尽可能逼真地描述现实世界中的各种活动和事件,这里主要指对作战行动的仿真。
分布交互仿真技术与以往仿真技术的不同之处在于: ①在体系结构上,由过去集中式、封闭式发展到分布式、开放式和交互式,构成可互操作、可移植、可伸缩及强交互的分布仿真体系结构。
②在功能上,由原来的单个武器平台的性能仿真发展到复杂作战环境下以多武器平台为基础的体系与体系对抗仿真。
③在手段上,从单一的结构仿真、真实仿真和虚拟仿真发展成为集上述多种仿真为一体的综合仿真。
④在效果上,由人只能从系统外部观察仿真的结果或直接参与实际物理系统的联试,发展到人能进入系统内部,与系统进行交互作用,并取得身临其境的感受。
3分布式交互仿真的类型军事仿真就其仿真逼真度可分为三种类型:①真实仿真———由实际的战斗人员使用实际的武器系统和保障系统,在尽可能真实的作战环境中进行实战演习。
②虚拟仿真———由实际战斗人员操作仿真的武器系统进行的作战仿真。
典型的例子是仿真器联网SIMNET。
③结构仿真———由仿真的人操作仿真的武器系统进行的仿真。
如作战模型。
以上三种仿真的结合及和与之相关的作战C4I系统达到无缝一体化,称之为无缝隙仿真。
它能给局中人和自动化部队在三种仿真范围内,提供一种相互作用的能力。
分布式交互仿真就是要实现这样的目标。
分布式交互仿真就应用角度可分为以下三种类型:1)平台级分布式交互仿真。
平台级分布式交互仿真主要用来连接武器装备训练,仿真器,构成一个综合战场环境,用于分队级多个训练仿真器间的联合训练。
2)聚合级仿真协议ALSP。
聚合级仿真协议ALSP主要用来联接聚合仿真系统,是使各仿真系统间能够进行互操作的软件协议,它被广泛用于支持美军来联接分析和训练系统。
3)高级体系结构HLA[1][3][4][10][11][12]。
HLA主要用来联接多个地点上不同的类型的仿真系统,来为高度交互活动的仿真创造一个逼真的、复杂的、虚拟世界。
该技术允许为了各自目的而设计的系统、不同时期的技术、不同供应商的产品、不同的服务平台联接在一起,并且允许它们在综合战场环境下进行互操作。
HLA代表分布交互仿真的下一代技术。
HLA由三个部分组成:HLA规则(the HLA Rules),HLA接口规范(the HLA Interface Specifi-cation),HLA对象模板(the ObjectModel Template)。
3基于HLA RTI的分布式交互仿真技术及其应用HLA体系规范主要包括三部分:1)规则。
保证联邦中仿真应用间按正确的方式进行交互,描述各联邦成员的责任及它们与RTI的关系。
提供了十条规则,分别对联邦和联邦成员作了规定。
2)对象模型模板。
定义HLA对象模型信息的通用方法,提供一种标准格式的HLA对象模型模板,以促进模型的互操作性和资源的可重用性。
3)接口规范说明。
定义联邦成员与联邦中其他成员进行信息交互的方式,即RTI的服务。
其定义了RTI的六大管理功能。
HLA RTI采用对称的体系结构,即在整个系统中,所有的应用程序都通过一个标准的接口形式发生交互,并共享服务和资源,是实现互操作的基础。
在该结构中,RTI是联邦执行的核心,其功能类似于分布式操作系统,为联邦成员提供运行时间所需的服务。
集中式分布的RTI结构采用中央RTI主机的方式,即每个仿真应用(即联邦成员)主机中都驻留有RTI接口程序,而中央RTI软件驻留在单独的一台机器中,每个联邦成员通过本结点驻留的RTI接口程序与中央RTI进行通讯,因此所有的仿真子系统都通过RTI进行通讯,使得通讯更加有序,具有较好的规模扩展性,并有利于降低网络流量,减轻网络负载。
此外该种结构把通讯层和仿真应用层分离开来,由RTI负责网络通讯和对联邦成员的协调管理,这样就可以集中精力于仿真应用层的设计开发,减小开发难度,提高开发效率。
3.2RTI的逻辑结构根据接口规范和联邦执行过程,RTI在联邦执行中的逻辑结构如下图所示RTI由RTI全局执行进程RtiExec、联邦执行进程FedExec和LibRTI库组成。
RtiExec 是一个全局进程,主要功能是管理联邦执行的创建和析构,即FedExec进程的创建和析构,每个联邦成员通过与RtiExec通讯来进行初始化,加入到相应的联邦执行中。
FedEx-ec管理一个与其一一对应的联邦仿真过程,管理联邦成员的加入和退出,为联邦成员间的数据通讯和协调运行提供支持。
LibRTI是一个C+ +库,给联邦的开发者提供HLA接口规范中定义的服务。
联邦成员使用LibRTI库来调用RTI服务,该成员与其它成员的信息交互就是通过调用LibRTI 库的成员函数来实现的。
在LibRTI库中有两个重要的类,RTIambas-sador类和FederateAmbassador类。
联邦成员中的Li-bRTI部分一般称为LRC(Local RTI Component)。
联邦成员通过调用RTI的标准服务RTIambassador完成加入联邦、设置时间管理方式、发布和预定FED文件中定义的对象类和交互类等工作。
同时,RTI又通过回调FederateAmbassador 接收该联邦成员预定的对象类数据。
3.3基于HLA RTI的分布式交互仿真应用系统的开发借助高级开发工具可以大大加快仿真应用系统的开发过程。
目前已有几种商业化的HLA RTI应用开发工具,这些仿真平台软件符合HLA接口规范,以HLA联邦开发与执行的标准过程为依据,采用方便、直观的可视化形式帮助开发者完成系统设计、开发与集成测试等工作。
以AEgis公司的LabWorks和Pitch公司的pRTI为例说明利用工具开发HLA RTI 应用系统的方法。
LabWorks包括四个功能模块,各模块可完成FEDEP各开发阶段的功能。
pRTI实现了HLA 接口规范中规定的所有服务,具有与平台无关、即插即用、完全线程化和C+ +绑定的良好特性,作为系统级支持构件,pRTI与LabWorks兼容。
与已有的实体建模和视景工具软件相结合,利用LabWorks和pRTI设计、开发HLA RTI 应用系统主要完成以下工作:1)定义联邦目标。
根据系统需求和可用资源,给出对系统需求初始的文档化描述。
2)开发联邦概念模型。
完成“联邦想定”并形成文档,以“联邦想定”开发的结果作为输入,开发联邦有关的“真实世界”的仿真模型,在概念层次上以“仿真对象”和“交互”描述功能。
3)设计联邦。
根据“联邦想定”、联邦概念模型和系统需求,确定联邦成员的构成,各联邦成员的对象信息和交互信息,制定出联邦开发计划。
4)开发联邦。
利用前期设计结果,在LabWorks环境中开发HLA对象模型。
5)集成和测试联邦。
完成联邦的所有开发工作,并进行测试。
4分布式交互仿真的关键技术分布式交互仿真是仿真技术与网络技术的结合。
仿真技术主要是开展仿真互联、仿真信息技术、仿真表示和仿真接口等方面的工作;网络技术包括网络结构、实时性和安全保密性等。
1)HLA技术。
HLA的目的是使参加仿真的系统具有互操作性和重用性,互操作性和重用性是促进建模与仿真发展的两个主要因素。
互操作性能使多个潜在的分布式参与者使用共同的建模与仿真环境,它能建立大规模作战演习模型,并能将作战与采购置于共同环境中,进行更加密切地相互作用;重用能使建模与仿真组件由多方使用,避免重复开发。
为了使建模与仿真的研制工作行之有效,就要求有一个通用的技术框架,以利于互操作性和重用性。
这个通用的技术框架就包括高层体系结构HLA。
(2)建模技术。
分布式交互仿真开发者的核心任务是利用建模实现仿真。
DIS建模更为特殊和复杂,因为在DIS中既有数学模型又有物理模型或半实物模型;既有定量模型又有定性模型或经验模型。
对含有人的节点,还要有人智能行为的模型。
要进行分布式交互仿真,如此众多模型的概念必须一致,信息必须相容,而且不同层次的模型应具有不同的集结度和分辨率。
目前,单一模型不可能满足国防部真实世界的运作要求,所以首先要确定一些较大的领域,为每项任务建立一个概念模型,最后将多个概念模型拼成单一框架。
这些概念模型能连贯地、互操作地和权威地表示环境、系统和人的行为。
( 3)计算机生成兵力CGF技术。
计算机生成兵力又称半自动兵力SAF,它能在用户的设置下,既能生成敌军,又能生成友军;能够在仿真需求的限定范围中表征仿真实体的行为特征。
该项技术的应用,可以在达到同样效果的同时,减少仿真中的仿真设备数量,缩小仿真规模。
(4)校验、验证和确认技术VV&A。
模型和数据都需要校核、验证和确认。
校核是确定模型能否准确表示开发者概念描述与系统所要求性能的过程;验证是从模型的应用角度,确定模型表示真实世界的准确程度;确认是在完成校核和验证之后,正式确定模型是否能为具体应用所接受的过程。
仿真实体和综合环境作为一个整体,必须经过严格的试验和评估,才能保证它们根据用户的要求产生逼真的结果,此种实验评估统称为校验、验证和确认VV&A。
(5)网络技术。
网络是实现分布式交互仿真最基本、最重要的基础设施,各类仿真实体通过网络进行交互作用。
网络技术包括网络结构、实体之间交换信息的单位、实时性和安全保密性等方面的技术。
分布交互仿真中各种武器平台对实时性的要求不同,时间延迟对仿真的逼真度有很大的影响,因此,DIS的实时性成为突出的问题。
(6)战场环境生成技术。
环境生成技术也叫环境仿真技术,目标是建立一个地形、环境数据库,提供通用的、权威性、类似于真实战场的环境表示,并且具有适当的分辨率、保真度和用户友好性,可应用在各种建模和仿真中。
只有借助关于地形、海洋、空中、空间、大气、电磁和其它环境的表示,仿真才能在作战、训练、试验和鉴定、研究与发展以及采购方面应用,并且能保证必要的精确度和有效性。
(7)人机界面技术。
由于DIS要把处在不同地点、不同层次的用户及其相关的设备联系在一起交互地进行仿真,因此,友好的人机界面至关重要。