人工神经网络算法 基础精讲
- 格式:ppt
- 大小:1.33 MB
- 文档页数:67


![[课件]人工神经网络-算法推导PPT](https://img.taocdn.com/s1/m/f9d95731a21614791611280f.png)

人工神经网络的算法
人工神经网络(Artificial Neural Network,ANN)是一种仿照生物神经网络原理构建的计算模型, 是指模仿人脑神经元结构,建立一种模糊推理的模型。
它由大量的神经元及其之间的连接构成,模仿人的大脑、神经系统的思维方式,可以处理模糊、多变、复杂的信息。
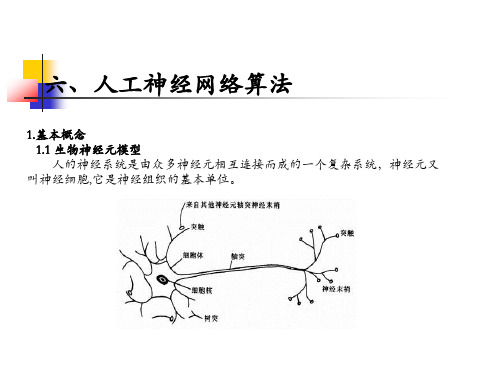
人工神经网络的基本结构包括神经元、联络和权重三要素。
神经元的工作原理:每个神经元都有很多杆,它们从其它神经元获取输入信号,并加权聚合,然后将聚合后的信号输出给其它神经元。
联络用于连接不同的神经元,而权重则用于每一个联络信号的加权。
人工神经网络的学习阶段是该网络内部的参数按照一定的机制(如误差反向传播算法)进行调整更新,使其输出的结果是一道题给出的解,使其在一定的范围内尽可能贴近正确答案的过程。
学习主要通过调整连接权重来完成,即为神经元连接权重设置有效值,从而使输出介于正确答案之间,从而达到最佳解的目的。
学习的结果可以决定网络的计算结果,也可以决定网络的性能,这就是学习算法的目的。
通常,学习算法的目标是最小化网络的总体损失,通过更新权重和偏置来增加网络的性能。
此外,人工神经网络还可以实现训练和参数压缩。