理论力学试题2和答案
- 格式:pdf
- 大小:202.09 KB
- 文档页数:9
理论力学题库及答案一、理论力学题库(一)选择题1. 在牛顿力学中,物体的运动状态可以用以下哪个物理量来描述?A. 力B. 动量C. 动能D. 动能定理2. 以下哪个物理量是守恒量?A. 动量B. 动能C. 力D. 功3. 一个物体做直线运动,以下哪个条件是物体做匀速直线运动的必要条件?A. 合外力为零B. 合外力恒定C. 速度恒定D. 加速度恒定(二)填空题4. 牛顿第二定律的表达式为______。
5. 动量的定义为______。
6. 功的计算公式为______。
7. 动能定理的表达式为______。
(三)计算题8. 一质量为2kg的物体在水平地面上受到一个水平力F的作用,力F与物体运动方向相同。
已知物体从静止开始运动,经过3秒后速度达到6m/s。
求力F的大小。
9. 一质量为4kg的物体从静止开始沿着光滑的斜面下滑,斜面倾角为30°,求物体下滑3秒后的速度。
10. 一质量为5kg的物体在水平地面上以10m/s的速度运动,遇到一个斜面,斜面倾角为45°,物体沿着斜面上滑,求物体上滑的最大距离。
二、理论力学题库答案(一)选择题答案1. B. 动量2. A. 动量3. A. 合外力为零(二)填空题答案4. F=ma5. 动量 = 质量× 速度6. 功 = 力× 位移× cosθ7. 动能定理:动能的增量 = 外力做的功(三)计算题答案8. 解:根据牛顿第二定律,F=ma,其中a为加速度,m为质量。
由题意知,a=(6m/s - 0m/s) / 3s = 2m/s²。
代入公式,F=2kg × 2m/s² = 4N。
9. 解:根据动能定理,动能的增量 = 外力做的功。
由于物体从静止开始下滑,初始动能为0。
下滑过程中,重力做功,即mgh,其中h为下滑的高度。
由斜面倾角可知,h =lsin30°,其中l为下滑的距离。
因此,mgh = (4kg ×9.8m/s²) × (l × sin30°) = 4kg × 9.8m/s² × (l × 0.5)。

理论力学考试题及答案详解一、选择题(每题2分,共10分)1. 牛顿第一定律又称为惯性定律,它指出:A. 物体在受力时,会改变运动状态B. 物体在不受力时,会保持静止或匀速直线运动C. 物体在受力时,会做圆周运动D. 物体在受力时,会保持原运动状态答案:B2. 根据胡克定律,弹簧的弹力与弹簧的形变量成正比,比例系数称为:A. 弹性系数B. 刚度系数C. 硬度系数D. 柔度系数答案:A3. 在理论力学中,一个系统动量守恒的条件是:A. 系统外力为零B. 系统外力和内力都为零C. 系统外力和内力之和为零D. 系统外力和内力之差为零答案:C4. 一个物体做自由落体运动,其加速度为:A. 0B. g(重力加速度)C. -gD. 取决于物体的质量答案:B5. 刚体的转动惯量与以下哪个因素无关?A. 质量B. 质量分布C. 旋转轴的位置D. 物体的形状答案:A二、填空题(每空2分,共10分)6. 一个物体受到三个共点力平衡,如果撤去其中两个力,而保持第三个力不变,物体的加速度将________。
答案:等于撤去的两个力的合力除以物体质量7. 根据动能定理,一个物体的动能等于工作力与物体位移的________。
答案:标量乘积8. 在光滑水平面上,两个冰球相互碰撞后,它们的总动能将________。
答案:守恒9. 一个物体在水平面上做匀速圆周运动,其向心力的方向始终________。
答案:指向圆心10. 刚体的角速度与角动量的关系是________。
答案:成正比三、简答题(共20分)11. 什么是达朗贝尔原理?请简述其在解决动力学问题中的应用。
答案:达朗贝尔原理是分析动力学问题的一种方法,它基于牛顿第二定律,用于处理作用在静止或匀速直线运动的物体上的力系。
在应用达朗贝尔原理时,可以将物体视为受力平衡的状态,即使物体实际上是在加速运动。
通过引入惯性力的概念,可以将动力学问题转化为静力学问题来求解。
12. 描述一下什么是科里奥利力,并解释它在地球上的表现。
2 平面力系(3)一、是非题1、 平面力系的主矢量是力系的合力。
(×)2、 平面力系的力多边形不封闭,则该力系对任意一点的主矩都不可能为零。
(×)3、 当平面一般力系向某点简化为力偶时,如果向另一点简化其结果相同。
(√)4、 首尾相接构成一封闭力多边形的平面力系是平衡力系。
(×)5、 若一平面力系对某点主矩为零,且主矢亦为零,则该力系为一平衡力系。
(√)6、 作用在刚体上的一个力,可以从原来的作用位置平行移动到该刚体内任意指定点,但必须附加一个力偶,附加力偶的矩等于原力对指定点的矩。
(√)7、平面力系向某点简化之主矢为零,主矩不为零。
则此力系可合成为一个合力偶,且此力系向任一点简化之主矩与简化中心的位置无关。
(√)8、若平面力系对一点的主矩为零,则此力系不可能合成为一个合力。
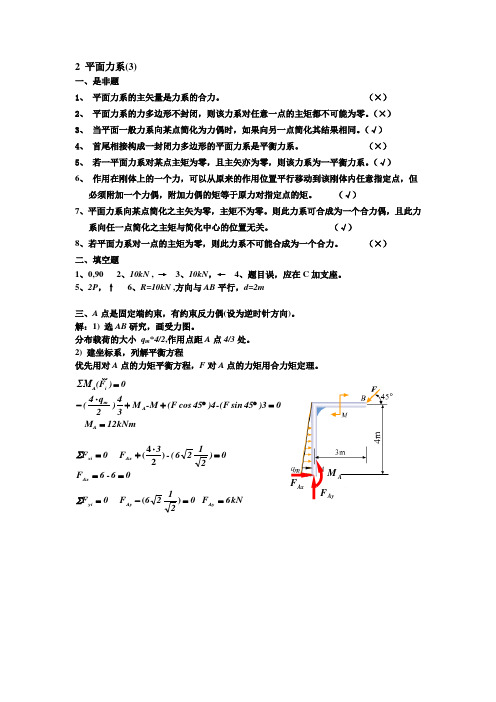
(×)二、填空题1、0,902、10kN , →3、10kN ,←4、题目误,应在C 加支座。
5、2P ,↑6、R=10kN ,方向与AB 平行,d=2m三、A 点是固定端约束,有约束反力偶(设为逆时针方向)。
解:1) 选AB 研究,画受力图。
分布载荷的大小 q m *4/2,作用点距A 点4/3处。
2) 建坐标系,列解平衡方程优先用对A 点的力矩平衡方程,F 对A 点的力矩用合力矩定理。
kNm12 M 03)45sin -(F 4)45cos (F -M M 34)2q 4(0)F (ΣM A A m i A ==︒︒++⋅-= 066F 0)2126(3F 0F Ax Ax xi ===⋅+=--)24(∑ kN 6F 02126F 0F Ay Ay yi ==-= )( ∑ Ax F Ay F A M。

理论力学第二章习题答案理论力学是物理学中研究物体运动规律和相互作用的分支学科,它以牛顿运动定律为基础,通过数学方法来描述物体的运动和力的作用。
本章习题答案将帮助学生更好地理解和掌握理论力学的基本概念和计算方法。
习题1:考虑一个质量为m的物体在重力作用下自由下落。
忽略空气阻力,求物体下落过程中的速度和位移。
答案:物体自由下落时,受到的力只有重力,大小为mg,方向向下。
根据牛顿第二定律,F=ma,可以得到加速度a=g。
物体的速度v随时间t变化,可以使用公式v=gt计算。
物体的位移s随时间变化,可以使用公式s=1/2gt^2计算。
习题2:一个质量为m的物体在水平面上以初速度v0开始运动,受到一个大小为k的恒定摩擦力作用。
求物体停止前所经过的距离。
答案:物体在水平面上运动时,受到的摩擦力与物体的位移成正比,即F=-kx。
根据牛顿第二定律,F=ma,可以得到加速度a=-k/m。
物体的位移x随时间t变化,可以使用公式x=v0t - 1/2(k/m)t^2计算。
当物体速度减至0时,物体停止,此时t=2v0/k,代入公式得到x=2v0^2/k。
习题3:一个质量为m的物体在斜面上,斜面与水平面的夹角为θ。
物体受到一个向上的拉力F,使得物体沿斜面匀速上升。
求拉力F的大小。
答案:物体沿斜面匀速上升时,拉力F与重力分量mgsinθ和摩擦力μmgcosθ平衡。
根据平衡条件,F=mgsinθ + μmgcosθ。
如果摩擦系数为μ,可以进一步简化为F=mg(sinθ + μcosθ)。
习题4:考虑一个质量为m的物体在竖直平面内做圆周运动,圆心位于物体的正下方。
物体的运动由一个弹簧连接到圆心,弹簧的劲度系数为k。
求物体在圆周运动中的角速度。
答案:物体在圆周运动中,受到弹簧力和重力的作用。
根据牛顿第二定律,向心力Fc=mv^2/r=ma,其中r为圆的半径。
由于物体做圆周运动,向心力由弹簧力和重力的垂直分量提供。
因此,Fc=kx - mgcosθ,其中x为弹簧的伸长量,θ为物体与竖直方向的夹角。
第一章静力学基础一、是非题1.力有两种作用效果,即力可以使物体的运动状态发生变化,也可以使物体发生变形。
()2.在理论力学中只研究力的外效应。
()3.两端用光滑铰链连接的构件是二力构件。
()4.作用在一个刚体上的任意两个力成平衡的必要与充分条件是:两个力的作用线相同,大小相等,方向相反。
()5.作用于刚体的力可沿其作用线移动而不改变其对刚体的运动效应。
()6.三力平衡定理指出:三力汇交于一点,则这三个力必然互相平衡。
()7.平面汇交力系平衡时,力多边形各力应首尾相接,但在作图时力的顺序可以不同。
()8.约束力的方向总是与约束所能阻止的被约束物体的运动方向一致的。
()二、选择题1.若作用在A点的两个大小不等的力F1和F2,沿同一直线但方向相反。
则其合力可以表示为。
①F1-F2;②F2-F1;③F1+F2;2.作用在一个刚体上的两个力F A、F B,满足F A=-F B的条件,则该二力可能是。
①作用力和反作用力或一对平衡的力;②一对平衡的力或一个力偶。
③一对平衡的力或一个力和一个力偶;④作用力和反作用力或一个力偶。
3.三力平衡定理是。
①共面不平行的三个力互相平衡必汇交于一点;②共面三力若平衡,必汇交于一点;③三力汇交于一点,则这三个力必互相平衡。
4.已知F1、F2、F3、F4为作用于刚体上的平面共点力系,其力矢关系如图所示为平行四边形,由此。
①力系可合成为一个力偶;②力系可合成为一个力;③力系简化为一个力和一个力偶;④力系的合力为零,力系平衡。
5.在下述原理、法则、定理中,只适用于刚体的有。
①二力平衡原理;②力的平行四边形法则;③加减平衡力系原理;④力的可传性原理;⑤作用与反作用定理。
三、填空题1.二力平衡和作用反作用定律中的两个力,都是等值、反向、共线的,所不同的是。
2.已知力F沿直线AB作用,其中一个分力的作用与AB成30°角,若欲使另一个分力的大小在所有分力中为最小,则此二分力间的夹角为度。

理论力学考试题及答案**理论力学考试题及答案**一、单项选择题(每题2分,共20分)1. 质点系中,内力的矢量和为零,这是基于()。
A. 牛顿第三定律B. 牛顿第二定律C. 牛顿第一定律D. 动量守恒定律答案:D2. 质心的位置由()决定。
A. 质点的质量B. 质点的位置C. 质点的加速度D. 质点的速度答案:B3. 刚体的转动惯量是关于()的量。
A. 质量B. 距离C. 力D. 速度答案:B4. 角动量守恒的条件是()。
A. 外力矩为零B. 外力为零C. 内力矩为零D. 内力为零答案:A5. 两质点组成的系统,若两质点质量相等,它们之间的万有引力为F,则系统的质心位置位于()。
A. 两质点连线的中点B. 质量较大的质点处C. 质量较小的质点处D. 无法确定答案:A6. 刚体绕固定轴的转动惯量I与()有关。
A. 质量分布B. 轴的位置C. 轴的方向D. 以上都是答案:D7. 刚体的平行轴定理表明,刚体绕任意轴的转动惯量等于绕通过质心的平行轴的转动惯量加上()。
A. 刚体的质量B. 刚体的转动惯量C. 刚体质量与两轴间距离的平方的乘积D. 刚体质量与两轴间距离的乘积答案:C8. 刚体的平面运动可以分解为()。
A. 任意两个不同的平面运动的叠加B. 平移和旋转的叠加C. 两个垂直平面内的旋转D. 任意两个不同的旋转的叠加答案:B9. 刚体的瞬时转轴是()。
A. 刚体上所有点速度相同的直线B. 刚体上所有点加速度相同的直线C. 刚体上所有点角速度相同的直线D. 刚体上所有点线速度为零的直线答案:D10. 刚体的定轴转动中,角速度的大小和方向()。
A. 与参考系的选择有关B. 与参考系的选择无关C. 与参考系的选择有关,但大小无关D. 与参考系的选择无关,但方向有关答案:B二、填空题(每题2分,共20分)1. 牛顿第二定律的数学表达式为:\( F = ma \),其中F表示力,m表示质量,a表示________。
理论力学复习题2
一、是非题(正确用√,错误用×)
1.刚体是指在外力作用下变形很小的物体。
()
2. 刚体的运动形式为平动时,若刚体上任一点的运动已知,则其它各点的运动随之确定。
()3.刚体作瞬时平动时,其上各点的速度相同,加速度也相同。
()
4.点的运动方向一定与作用在质点上的力的方向相同。
()
5.当质点系中每一个质点都做高速运动时,该质点系的动量不一定很大。
()
二、选择题(单选题)
三、已知:右端外伸梁ABC,受力P、Q和q 。
A为固定铰链支座,B为可动铰链支座。
试求:A和B处的约束反力。
P。
理论力学试题及答案一、选择题(每题5分,共30分)1. 牛顿第一定律也被称为惯性定律,其表述为:A. 力是改变物体运动状态的原因B. 物体在没有外力作用下,将保持静止或匀速直线运动C. 物体的加速度与作用力成正比D. 物体的加速度与作用力成反比答案:B2. 以下哪个选项是能量守恒定律的表述?A. 能量不能被创造或消灭B. 能量可以被创造或消灭C. 能量只能从一种形式转换为另一种形式D. 能量不能从一种形式转换为另一种形式答案:A3. 根据牛顿第二定律,以下哪个选项是正确的?A. 力是物体运动的原因B. 力是改变物体运动状态的原因C. 力与物体的质量成正比D. 力与物体的加速度成反比答案:B4. 一个物体在水平面上以恒定速度运动,其加速度为:A. 0B. 正C. 负D. 不确定答案:A5. 以下哪个选项是动量守恒定律的表述?A. 系统内总动量在没有外力作用下保持不变B. 系统内总动量在有外力作用下保持不变C. 系统内总动量随时间变化D. 系统内总动量与系统的质量成正比答案:A6. 以下哪个选项是角动量守恒定律的表述?A. 系统内总角动量在没有外力矩作用下保持不变B. 系统内总角动量在有外力矩作用下保持不变C. 系统内总角动量随时间变化D. 系统内总角动量与系统的角速度成正比答案:A二、填空题(每题5分,共20分)1. 牛顿第三定律表述为:作用力和反作用力大小相等,方向相反,且作用在不同的物体上。
2. 一个物体的惯性质量与其______成正比。
答案:质量3. 根据牛顿第二定律,物体的加速度与作用力成正比,与物体的______成反比。
答案:质量4. 动量是物体的质量和______的乘积。
答案:速度三、简答题(每题10分,共20分)1. 描述一下牛顿第一定律的内容,并解释其在物理学中的意义。
答案:牛顿第一定律,也称为惯性定律,表述为在没有外力作用下,物体将保持静止或匀速直线运动。
这一定律的意义在于,它揭示了物体的惯性特性,即物体倾向于保持其当前运动状态,除非有外力作用于其上。
理论力学试题及答案一、选择题(每题2分,共20分)1. 牛顿第一定律描述的是:A. 物体在受力时的运动状态B. 物体在不受力时的运动状态C. 物体在受力时的加速度D. 物体在受力时的位移答案:B2. 根据牛顿第二定律,物体的加速度与作用力和物体质量的关系是:A. 加速度与作用力成正比,与质量成反比B. 加速度与作用力成反比,与质量成正比C. 加速度与作用力成正比,与质量成正比D. 加速度与作用力成反比,与质量成反比答案:A3. 以下哪个不是刚体的运动特性?A. 刚体的质心保持静止或匀速直线运动B. 刚体的各部分相对位置不变C. 刚体的各部分速度相同D. 刚体的各部分加速度相同答案:C4. 角动量守恒定律适用于:A. 只有重力作用的系统B. 只有内力作用的系统C. 外力矩为零的系统D. 外力为零的系统答案:C5. 以下哪个是能量守恒定律的表述?A. 一个封闭系统的总动能是恒定的B. 一个封闭系统的总势能是恒定的C. 一个封闭系统的总能量是恒定的D. 一个封闭系统的总动量是恒定的答案:C二、简答题(每题10分,共20分)6. 简述牛顿第三定律的内容及其在实际中的应用。
答案:牛顿第三定律,又称作用与反作用定律,表述为:对于两个相互作用的物体,它们之间的作用力和反作用力总是大小相等、方向相反。
在实际应用中,例如在推门时,门对人的作用力和人对门的作用力大小相等,方向相反。
7. 描述什么是简谐振动,并给出一个生活中的例子。
答案:简谐振动是一种周期性振动,其回复力与位移成正比,且总是指向平衡位置。
生活中的例子包括弹簧振子,当弹簧被拉伸或压缩后释放,它会在原始平衡位置附近做周期性的往复运动。
三、计算题(每题15分,共30分)8. 一个质量为m的物体,从静止开始,沿着一个斜面下滑,斜面的倾角为θ。
如果斜面的摩擦系数为μ,求物体下滑的加速度。
答案:首先,物体受到重力mg的作用,分解为沿斜面方向的分力mg sinθ和垂直斜面方向的分力mg cosθ。
理论力学测试题及答案一、单项选择题(每题2分,共10分)1. 牛顿第一定律描述的是:A. 物体在没有外力作用下的运动状态B. 物体在受到平衡力作用下的运动状态C. 物体在受到非平衡力作用下的运动状态D. 物体在任何力作用下的运动状态答案:A2. 以下哪个不是惯性参考系的特点?A. 牛顿第一定律在其中成立B. 牛顿第二定律在其中成立C. 牛顿第三定律在其中成立D. 物体在其中不受任何力的作用答案:D3. 动量守恒定律适用于:A. 只有重力作用的系统B. 只有弹力作用的系统C. 只有摩擦力作用的系统D. 只有保守力作用的系统答案:D4. 以下哪个是矢量?A. 质量B. 速度C. 时间D. 温度答案:B5. 以下哪个是标量?A. 力B. 位移C. 功D. 速度答案:C二、填空题(每空1分,共10分)1. 牛顿第二定律的数学表达式为:\[ F = ma \],其中\( F \)代表______,\( m \)代表______,\( a \)代表______。
答案:力;质量;加速度2. 根据牛顿第三定律,作用力和反作用力大小相等,方向______,作用在______。
答案:相反;不同物体上3. 动量的定义是质量与______的乘积。
答案:速度4. 功的定义是力与力的方向上的______的乘积。
答案:位移5. 动能的定义是\( \frac{1}{2}mv^2 \),其中\( m \)代表______,\( v \)代表______。
答案:质量;速度三、简答题(每题10分,共20分)1. 简述牛顿第二定律的物理意义。
答案:牛顿第二定律表明,物体的加速度与作用在物体上的合外力成正比,与物体的质量成反比,即力是改变物体运动状态的原因。
2. 描述动量守恒定律在碰撞过程中的应用。
答案:在没有外力作用的系统中,两个或多个物体发生碰撞时,碰撞前后系统的总动量保持不变。
这意味着碰撞前后各物体动量的矢量和相等。
四、计算题(每题15分,共30分)1. 一辆质量为1500kg的汽车以20m/s的速度行驶,突然刹车,经过5秒后停止。