
第二章控制系统的数学模型
例1:试用结构图等效化简下图系统的传递函数
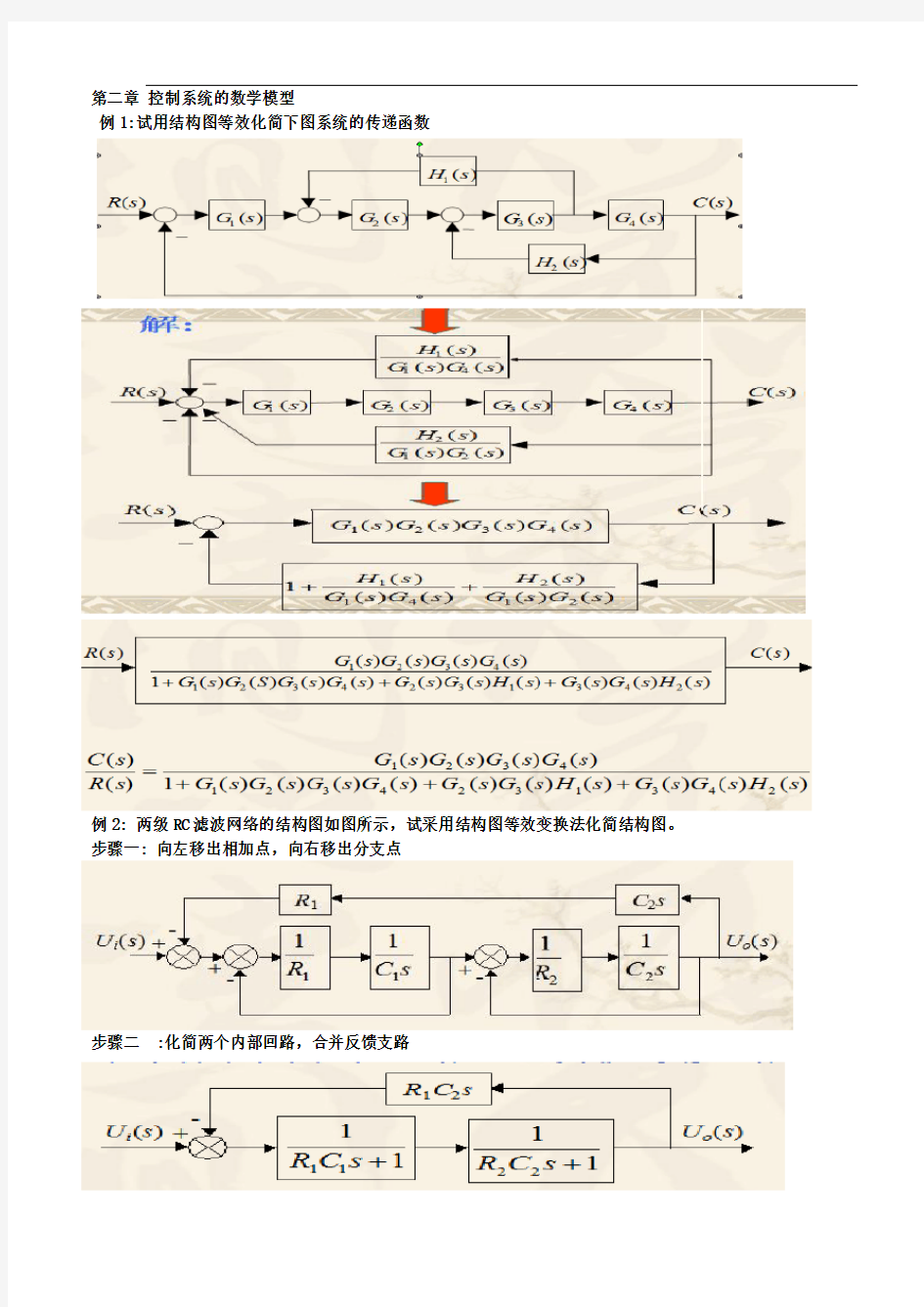
例2: 两级RC滤波网络的结构图如图所示,试采用结构图等效变换法化简结构图。步骤一: 向左移出相加点,向右移出分支点
步骤二 :化简两个内部回路,合并反馈支路
步骤三 : 反馈回路化简
例3:系统结构图如下,求传递函数
[解]:结构图等效变换如下:
例4:已知系统方程组如下,试绘制系统结构图,并求闭环传递函数。
?
?
?
?
?
?
?
=
-
=
-
=
-
-
=
)
(
)
(
)
(
)
(
)]
(
)
(
)
(
[
)
(
)]
(
)
(
)
(
)[
(
)
(
)
(
)]
(
)
(
)[
(
)
(
)
(
)
(
3
4
3
5
2
3
3
6
1
2
2
8
7
1
1
1
s
X
s
G
s
C
s
G
s
G
s
C
s
X
s
X
s
X
s
G
s
X
s
G
s
X
s
C
s
G
s
G
s
G
s
R
s
G
s
X
解 : 系统结构图如下图所示。利用结构图等效化简或梅逊增益公式可求出系统的闭环传递函数为:
8
43217432154363243211)()
(G G G G G G G G G G G G G G G G G G G G s R s C -+++=
第三章 线性系统的时域分析法
例1: 设题1图(a )所示系统的单位阶跃响应如图(b )所示。试确定系统参数k1,k2和a 。 解: 由系统阶跃响应曲线有
???
??=-===∞333
.03)34(1.03)(o o
p t h σ 系统闭环传递函数为:
2
2
2
21221211
2)
(1)
()(n
n n s s K K as s K K K a s s K a s s K s ωξωω++=++=?++
+=Φ 由 ???
??===-=--333
.01.01212
ξξπσξωπe t o
o n p 联立求解得 ???==28.3333
.0n ωξ => ?
??====22211082
1n n a K ξωω
另外 3lim 1)(lim )(21
22100
==++=?
Φ=∞→→K K as s K
K s s s h s s 例2: 系统结构图如下图所示。已知系统单位阶跃响应的超调量 %3.16=p M ,峰值时间1=p t (秒) (1).求系统的开环传递函数G(s);
(2).求系统的闭环传递函数)(s Φ;
(3)根据已知的性能指标%σ,p t 确定系统参数K 及
τ
;
(4)计算等速输入t t r 5.1)(=(度/秒)时系统的稳态误差。
解 (1) )110(10)
1(101)
1(10
)(++=
++
+=ττs s K s s s s s K s G (2) 2
2
22210)110(10)(1)()(n
n n s s K s s K
s G s G s ωξωωτ++=+++=+=Φ
(3)由 ??
???=-===--113.162
12ξωπ
?ξπn p o
o
p
t e M 联立解出 ???==63.35.0n ωξ 比较得:263.010
163.35.021012=-??=-?=n ζωτ
318.11063.3102
2===n K ω (4) 63.31
263.01018.1311010)(lim 0=+?=+==→τK s sG K s v 413.063.35.1===v ss K A e 例3: 单位反馈系统的开环传递函数为 )
5)(3()(++=
s s s K
s G
1.试确定闭环系统稳定时参数K 的取值范围;
2.为使系统特征根的实部不大于-1,试确定K 的取值范围。 解:1. 闭环特征方程为: 01582
3
=+++K s s s
劳斯表:
0812081510
123K
s K
s K s s - 闭环系统稳定条件:120-K>0,K>0 1200???K
2.做代换 1-=z s 有:0)8(25)1(15)1(8)
1(2323
=-+++=+-+-+-K z z z K z z z
劳斯表:
8
051885210
1
23---K z K z
K z z 由劳斯判据得:18-K>0,K-8>0 188???K
第四章 线性系统的根轨迹法
例1:单位反馈系统的开环传递函数 )
4)(1()(++=
s s s k
s G
(1). 试概略绘出系统根轨迹(求出渐近线,分离点,与虚轴交点); (2). 确定系统(相应主导极点)为欠阻尼状态时K
解:(1) 1).实轴上的根轨迹: (]]0,1[,4,--∞-
2).渐近线: ???
????
±=+±=-=-=-+-+=-
180,603180)12(67.1353)4()1(0k A θσ 3). 分离点: )45(0)
4)(1(123s s s k s s s k
++-=?=+++
0410302=++?=s s ds
dk
解之得:,46.01-=s 87.22-=s (舍去) 4).虚轴的交点:特征方程为:0452
3
=+++K s s s k
s k
s k s s 0
1230
520541-
,20,020==-k k 0205522=+=+s k s
交点为: 2j s ±= (2). 88.04
146
.01=++?=-=s d s s s K
依题有:2088.0< 例1:单位反馈系统的开环传递函数为: ) 100(500 )(2++=s s s s G 试用奈氏稳定判据判断闭环系统的稳定性。 解: 绘制系统开环幅相曲线 [] )()()100() 100(500500)100(500)(22222ωωω ωωωωωωωωjV U j j j j G +=+----=+-= ?-∞∠=90)0(j G ?-∠=∞2700)(j G )(ωj G 与实轴的交点: 令 0)(=ωV 解出 10=ω代入)(ωU 表达式 得出: 5)10(-=U 根据奈氏判据有 : 2120=?+=+=N P Z 所以闭环系统不稳定。 例2:已知一最小相位系统开环对数幅频特性如下图所示,试写出系统开环传递函数。 解: )1)(11 .01()(++= s s s K s G 401 .0lg 20=K 10=K ω ) 1)(110(10 )(++= s s s s G 第七章 线性离散系统的分析与校正 例1 :下图所示系统采样周期 T=1(s),)()1()(122k e k e k e +-=试确定系统稳定时的K 值范围。 解 : ) ()()()()1()(1212122z E z E z z E k e k e k e +=+-=- =>1 1211 )()()(--== z z E z E z D 广义对象脉冲传递函数: 368.0632.0))(1()1()1()1()1()(11 11 -=?? ????----=??????+-=----z K e z z Kz e z s s K Z z z G 开环脉冲传递函数为: ) 368.0)(1(632.0368.0632.011)()(1 --=-?-= -z z Kz z K z z G z D 闭环特征方程: 0368.0)368.1632.0()()(12 =+-+=+z K z z G z D 进行w 变换,令1 1-+= w w z 化简得 :0632.0264.1)0632736.2(2 =++-K w w K 若系统稳定,必须满足: ?????>->0 632.0736.20 632.0K K => 329.40< 例2 :已知线性定常离散系统如下图所示,其中采样周期T=1秒。 (1).求出系统开环脉冲传递函数; (2).求出系统闭环脉冲传递函数; (3).试判断闭环系统稳定性; (4).计算r(t)=2t 作用时系统的稳态误差。 解: 1 43.0,26.0342.0,0368.0368.12). 3(368.0368.12)(1)()(). 2()368.0)(1(1111)(). 1(2,12,1222 2<=±==+-+-= +=Φ--=-?-=??? ???+???????=-z j z z z z z z z G z G z z z z e z z z z s Z s Z Z G T 264 .1582 .12 2)(582.1)368.0)(1()1(lim )()1(lim ).4(2 11===∞=??????--?-=-=→→V z z p K e z z z z z G z K 第六章 线性系统的校正方法 滞后校正设计原理 采用滞后网络进行校正时,主要是利用其高频幅值衰减的特性,使校正后系统截止频率ωc 降低,从而使系统获得较大的相位裕量。为了力求避免最大滞后角发生在校正后系统开环截止频率ωc 附近,以免恶化系统动态性能。因此选择滞后网络参数时,总是使滞后网络的第二个转折频率1/T 远小于ωc ,一般取: c T ω)10 1~51(1= 如何确定串联校正装置的类型 串联超前校正主要是利用超前网络或PD 控制器的相角超前特性。只要正确地将超前网络的交接频率1/Τ和1/αΤ选在待校正系统截止频率的两边,并适当选择参数α和Τ,就可以使已校正系统的截止频率和相角裕度满足性能指标的要求,从而改善系统的动态性能。当线性系统对动态性能指标的要求较高时,可采用串联超前校正。但以下两种情况不采用超前校正: 1. 需要超前网络提供的超前角大于60°。此时超前网络的α值必须选得很小,从而造成已校正系统带宽过大,系统抗干扰能力差; 2. 在截止频率附近相角迅速减小的待校正系统,一般不适合采用超前校正。 串联滞后校正主要是利用滞后网络或PI 调节器的高频幅值衰减特性,使已校正系统截止频率下降,从而使系统获得足够的相角裕度。在系统响应速度要求不高而抑制噪声性能要求较高,或待校正系统已具备满意的动态性能,仅稳态性能不满足指标要求时,可采用串联滞后校正。 串联滞后—超前校正兼有滞后校正和超前校正的优点,即系统要求响应速度快,超调量小,稳态性能好,抑制高频噪声的能力强,通常采用滞后—超前校正。 频率特性类题目 1 一个系统的开环传递函数为 ,试绘制其当K=5、30时系统的开环频率特性Nyquist 图,并判断系统的稳定性。 2系统开环传递函数为 ,建立其零极点增益模型, 然后分别绘制当K=5、K=30时系统的开环频率特性Bode 图,并判断系统的稳定性。 3 系统开环传递函数为 ,计算K=5和K=30时系统的幅值裕度与相位裕度。 4 已知某系统的闭环传递函数()s Φ如下,试用roots ()命令来判断系统的稳定性。 25432 325 ()24576 s s s s s s s s ++Φ=+++++ 5 某单位负反馈系统的开环控制系统的传递函数为 2k (0.80.64) ()(0.05)(5)(40) K s s G s s s s s ++=+++ (1)绘制系统的根轨迹; (2)当10K =时,绘制系统的Bode 图,判断系统的稳定性,并且求出幅值裕度和相角裕度。 6 已知系统的状态空间模型如下: ???=11x ???-31x + ?? ????01u [1=y ]1x (1)绘制系统的Bode 图和nyquist 图; (2)求系统的幅值裕度和相位裕度; 7 已知单位负反馈系统的开环传递函数为 ) 1(1 2 ++s s s ,试绘制系统的单位阶跃响 应、开环Bode 图和Nyquist 曲线,并求系统的幅值裕度和相位裕度。 ) 5.01)(1.01()(s s s k s G ++=) 5.01)(1.01()(s s s k s G ++=) 5.01)(1.01()(s s s k s G ++= 8 用筛选法求某自然数范围内的全部素数。素数是大于1,且除了1和它本身以外,不能被其他任何整数所整除的整数。用筛选法求素数的基本思想是:要找出2~m 之间的全部素数,首先在2~m 中划去2的倍数(不包括2),然后划去3的倍数(不包括3),由于4已被划去,再找5的倍数 (不包括5),…,直到再划去不超过的数的倍数,剩下的数都是素数。 9 已知 ∑ =-=n k k y 11 21 ,当n=100时,求y 的值。 10 利用for 循环计算1!+2!+3!+….. +20!的值。 11 用while 循环来实现求1+2+……+100的值。 12 编一函数计算以下分段函数值。 2 32(0)21 (01)321(1)x x x x x x x 洛阳理工学院 2010/2011 学年第二学期自动控制原理期末考试试题卷(B) 适用班级:B 考试日期时间:适用班级: 一、判断题。正确的打√,错误的打×。(每小题1分,共10分) 1.传递函数是线性定常系统的一种内部描述模型。() 2.劳斯判据是判断线性定常系统稳定性的一种代数判据。() 3.频域分析法是根据闭环系统的频率特性研究闭环系统性能的一种图解方法。( ) 4.频率响应是系统在正弦输入信号下的全部响应。() 5.绘制系统Bode图时,低频段曲线由系统中的比例环节(放大环节)和微积分环节决定( ) 6.对于线性定常系统,若开环传递函数不包括积分和微分环节,则当0 ω=时,开环幅相特性曲线(Nyquist图)从正虚轴开始。() 7.开环控制系统的控制器和控制对象之间只有正向作用,系统输出量不会对控制器产生任何影响。() 8.Ⅰ型系统,当过渡过程结束后,系统对斜坡输入信号的跟踪误差为零。() 9.控制系统分析方法中,经典控制理论的分析方法有频域分析法、根轨迹分析法、时域分析法。() 10.已知某校正网络传递函数为 1 () 1 s G s as + = + ,当满足a>1条件时,则该校正网络为滞后校正网络。() 二、单选题(每小题2分,共20分) 1.下述()属于对闭环控制系统的基本要求。 (A)稳定性(B)准确性(C)快速性(D)前面三个都是 2.分析线性控制系统动态性能时,最常用的典型输入信号是()。 (A)单位脉冲函数(B)单位阶跃函数 (C)单位斜坡函数(D)单位加速度函数 3.典型二阶系统阻尼比等于1时,称该系统处于()状态。 (A)无阻尼(B)欠阻尼(C)临界阻尼(D)系统不稳定或临界稳定 4.稳定最小相位系统的Nyquist图,其增益(幅值)裕度()。 (A)0 hdB<(B)0 hdB>(C)1 hdB<(D)1 hdB> 5.单位反馈控制系统的开环传递函数为 4 () (5) G s s s = + ,则系统在()2 r t t =输入作用下,其稳态误差为()。 (A)10 4 (B) 5 4 (C) 4 5 (D)0 6.一个线性系统的稳定性取决于()。 (A)系统的输入(B)系统本身的结构和参数 精品文档过程控制系统考试试题汇总(预测) 编辑:郭长龙河南工业大学 一:填空题28分 1?过程控制系统一般由控制器、执行器、被控过程、测量变送等环节组成。 2.过程控制系统由工程仪表和被控过程两部分组成。 3?过程控制仪表的测量变送环节由传感器和变送器两部分组成。 4.过程检测仪表的接线方式有两种:电流二线制四线制、电阻三线制 5?工程中,常用引用误差作为判断进度等级的尺度。 6?压力检测的类型有三种,分别为:弹性式压力检测、应变式压力检测、压阻式压力检测 7?调节阀按能源不同分为三类:气动调节阀、电动调节阀、液动调节阀&电动执行机构本质上是一个位置伺服系统。 9 ?气动执行结构主要有薄膜式和活塞式两大类。 10. 理想流量特性有四类,分别是直线、对数、抛物线、快开。 11. 过程数学模型的求取方法有三种,分别是机理建模、试验建模、混合建模。 12?PID调节器分为模拟式和数字式两种。 13?造成积分饱和现象的内因是控制器包含积分控制作用,外因是控制器长期存在偏差。 14?自动控制系统稳定运行的必要条件是:闭环回路形成负反馈。 15?DCS的基本组成结构形式是三点一线”。 二:名词解释20分 1?过程控制:指根据工业生产过程的特点,采用测量仪表、执行机构和计算机等自动化工具,应用控制理论,设计工业生产过程控制系统,实现工业生产过程自动化。 2?积分饱和:在积分控制范围内,积分控制输出与偏差的时间积分成正比,当控制输出达到一定限制后就不在继续上升或下降,这就是积分饱和现象。 3?串级控制系统:值采用两个控制器串联工作,主控制器的输出作为副控制器的设定值,由副控制器的输入去操纵调节阀,从而对住被控变量具有更好的控制效果。 4?比例控制系统:凡是两个或多个参数自动维持一定比例关系的过程控制系统,称为比例控制系统。5均匀控制系统:控制量和被控量在一定范围内都缓慢而均匀的变化的系统,称为均匀控制系统。6?超驰控制系统:指在一个控制系统中,设有两个控制器,通过高低值选择器选出能适应安全生产状态的控制信号,实现对生产过程的自动化控制。 7?分程控制系统:一个控制器的输出信号分段分别去控制两个或两个以上调节阀动作的系统称为分程控制系统。 8?阀位控制系统:是综合考虑快速性、有效性、经济性和合理性的一种控制系统。 9?集散控制系统:是把控制技术、计算机技术、图像显示技术及通信技术结合起来,实现对生产过程的监视控制和管理的系统。 10?现场总线:是指将现场设备与工业控制单元、现场操作站等互联而成的计算机网络,具有全数字化、分散、双向传输和多分枝的特点,是工业控制网络向现场级发展的产物。 三:简答题32分 1?什么是PID,它有哪三个参数,各有什么作用?怎样控制? 答:PID是比例-积分-微分的简称。其三个参数及作用分别为: (1 )比例参数KC,作用是加快调节,减小稳态误差。 (2)积分参数Ki,作用是减小稳态误差,提高无差度 精品文档 学习中心 姓 名 学 号 电子科技大学网络与继续教育学院 《自动控制原理》模拟试题一 一、简答题(共25分) 1、简述闭环系统的特点,并绘制闭环系统的结构框图。( 8分) 2、简要画出二阶系统特征根的位置与响应曲线之间的关系。( 10分) 3、串联校正的特点及其分类?( 7分) 二、已知某单位负反馈系统的开环传递函数为) 42()(2++= s s s K s G K ,试确定使系统产生持续振荡的K 值,并求振荡频率ω。( 15分) 三、设某系统的结构及其单位阶跃响应如图所示。试确定系统参数,1K 2K 和a 。( 15分) 四、某最小相角系统的开环对数幅频特性如图示。要求(20分) 1)写出系统开环传递函数; 2)利用相角裕度判断系统的稳定性; 3)将其对数幅频特性向右平移十倍频程,试讨论对系统性能的影响。 五、设单位反馈系统的开环传递函数为 ) 1()(+=s s K s G 试设计一串联超前校正装置,使系统满足如下指标:(25分) (1)在单位斜坡输入下的稳态误差151 ss e ; (2)截止频率ωc ≥7.5(rad/s); (3)相角裕度γ≥45°。 模拟试题一参考答案: 一、简答题 1、简述闭环系统的特点,并绘制闭环系统的结构框图。 解: 闭环系统的结构框图如图: 闭环系统的特点: 闭环控制系统的最大特点是检测偏差、 纠正偏差。 1) 由于增加了反馈通道, 系统的控制精度得到了提高。 2) 由于存在系统的反馈, 可以较好地抑制系统各环节中可能存在的扰动和由于器件的老化而引起的结构和参数的不确定性。 3) 反馈环节的存在可以较好地改善系统的动态性能。 2、简要画出二阶系统特征根的位置与响应曲线之间的关系。 解: 《自动控制系统计算机仿真》习题参考答案 1-1什么是仿真?它的主要优点是什么?它所遵循的基本康JM是什么? 答:所谓仿耳,畝是使用其它相似的系统来樓仿曳实的需要研究的系统.计算机仿真是指以数字计算机为主要工具,编写并且运行反映真实系统运行状况的程序.对计算机■出的信息进行分析和研究,从而对实际系统运行状杏和演化规律进行編合评估与预测.它是非的设计自动控制系统或甘评价系统性能和功能的一种技术手段. 仿真的主要优点是,方便快捷、成本低巌、工作效車和计算II度都很高.它所遵循的基本原则是相似性原理. 1-2你认为计算机仿真的发展方向是什么? 各;向模型更加准确的方向发展,向虐拟现实技术,以及高技术智能化、一体化方向发尺.向更加广■的时空发展. 1-3计算机敷字仿真包括■些要素?它们的关系如何? 答,计算机仿真的三要素是:系一丸的对象、模一系统的抽象、计算机一真的工具和手段.它<1的关系是相互依存. 2-1控制算法的步长应该如何选择? ?:控制算法步长的选择应该怡当.如果步长太小,就会增加迭代次数,增加计算量;如果步长太大,计算碳養将显著堆加,甚至造成计算结杲失真. 2-2通常控制系统的建模有■几种方法? 4t. i\ *?、1、绘厶 2-2通常控制系统的建模有■几种方法? I)机理建模法,2)实鲨麓模法;3)综合建模法. 2-3用欧拉法求以下系统的■出响应)?(/)在0W/W1上"0.1时的效值解? y + y = 0, y(0) = 0.8 解,输入以下语句 dt=0. 1; X set step y=0.8; % set initial value for 1=1:10; 尸y-y拿dt; yl (i+l)=y; end t=0:0. 1:1; yl (1)=0. 8; plot (t,yl) 2012—2013学年第1学期 《自动控制原理》期中考试试卷 (适用专业:自动化、电气、测控) 专业班级 姓名 学号 开课系室信控学院自动化系 考试日期2012年11月25日 一、简答题(18分) 1. 控制系统正常工作的最基本要求是什么? 答:稳定性、快速性、准确性(3分) 2.什么是线性系统?线性系统的特征是什么? 答:用线性微分方程描述的系统称为线性系统。 其特征是满足叠加原理,即叠加性与齐次性。(3分) 3.控制系统的传递函数的定义和应用范围是什么? 答:控制系统的传递函数的定义为:零初始条件下,系统输出量的拉氏变换与输入量的拉氏变换之比。 应用范围是:线性定常系统(3分) 4.控制器中加入比例+微分环节对控制系统的影响是什么? 答:比例微分环节可增大系统的阻尼比,超调量增加,调节时间缩短,且不影响系统的稳态误差与自然振荡频率;允许选取较高的开环增益,因此在保证一定的动态性能条件下,可以减小稳态误差。(3分) 5.控制系统的稳态误差取决于哪些因素? 答:开环增益、系统型别、输入信号的形式与幅值。(3分) 6.线性定常系统稳定的充分必要条件是什么? 答:线性定常系统稳定的充分必要条件是闭环特征方程的根均具有负实部,或闭环传递函数的极点均位于s左半平面。(3分) 二、(1)由图1所示系统结构图求出相应的传递函数()/() C s N s。 C s R s和()/()(8分) 图1 系统结构图 (2)由图2所示系统结构图求出相应的传递函数()/()C s R s 。(8分) 图2系统结构图 解:(1)当仅考虑()R s 作用时,经过反馈连接等效,可得简化结构图(图1-1),则系统传递函数为 12221212 22123 322 1() ()111G G G H G G C s G G R s G H G G H H G H -== -++- (4分) 图1-1()R s 作用时的简化结构图 当仅考虑()N s 作用时,系统结构图如图1-2所示。系统经过比较点后移和串、并联等效,可得简化结构图,如图1-4所示。则系统传递函数为 1122121221322123 (1)()()1()1G H G G G G H C s N s G H G H G H G G H ++==---+ (4分) 一:填空题 28分 1.过程控制系统一般由控制器、执行器、被控过程、测量变送等环节组成。 2.过程控制系统由工程仪表和被控过程两部分组成。 3.过程控制仪表的测量变送环节由传感器和变送器两部分组成。 4.过程检测仪表的接线方式有两种:电流二线制四线制、电阻三线制 5.工程中,常用引用误差作为判断进度等级的尺度。 6.压力检测的类型有三种,分别为:弹性式压力检测、应变式压力检测、压阻式压力检测 7.调节阀按能源不同分为三类:气动调节阀、电动调节阀、液动调节阀 8.电动执行机构本质上是一个位置伺服系统。 9.气动执行结构主要有薄膜式和活塞式两大类。 10. 理想流量特性有四类,分别是直线、对数、抛物线、快开。 11. 过程数学模型的求取方法有三种,分别是机理建模、试验建模、混合建模。 12.PID调节器分为模拟式和数字式两种。 13.造成积分饱和现象的内因是控制器包含积分控制作用,外因是控制器长期存在偏差。 14.自动控制系统稳定运行的必要条件是:闭环回路形成负反馈。 15. DCS的基本组成结构形式是“三点一线”。 二:名词解释 20分 1.过程控制:指根据工业生产过程的特点,采用测量仪表、执行机构和计算机等自动化工具,应用控制理论,设计工业生产过程控制系统,实现工业生产过程自动化。 2.积分饱和: 在积分控制范围内,积分控制输出与偏差的时间积分成正比,当控制输出达到一定限制后就不在继续上升或下降,这就是积分饱和现象。 3.串级控制系统:值采用两个控制器串联工作,主控制器的输出作为副控制器的设定值,由副控制器的输入去操纵调节阀,从而对住被控变量具有更好的控制效果。 4.比例控制系统:凡是两个或多个参数自动维持一定比例关系的过程控制系统,称为比例控制系统。 5均匀控制系统:控制量和被控量在一定范围内都缓慢而均匀的变化的系统,称为均匀控制系统。 6.超驰控制系统:指在一个控制系统中,设有两个控制器,通过高低值选择器选出能适应安全生产状态的控制信号,实现对生产过程的自动化控制。 7.分程控制系统:一个控制器的输出信号分段分别去控制两个或两个以上调节阀动作的系统称为分程控制系统。 8.阀位控制系统:是综合考虑快速性、有效性、经济性和合理性的一种控制系统。 9.集散控制系统:是把控制技术、计算机技术、图像显示技术及通信技术结合起来,实现对生产过程的监视控制和管理的系统。 10.现场总线:是指将现场设备与工业控制单元、现场操作站等互联而成的计算机网络,具有全数字化、分散、双向传输和多分枝的特点,是工业控制网络向现场级发展的产物。 三:简答题 32分 1.什么是PID,它有哪三个参数,各有什么作用?怎样控制? 答: PID是比例-积分-微分的简称。其三个参数及作用分别为: (1)比例参数KC,作用是加快调节,减小稳态误差。 (2)积分参数Ki,作用是减小稳态误差,提高无差度 (3)微分参数Kd,作用是能遇见偏差变化趋势,产生超前控制作用,减少超调量,减少调节时间。2.正反方向判断气开气关,如何选择? P84 答:所谓起开式,是指当气体的压力信号增大时,阀门开大;气关式则相反,压力增大时,阀门关小。气动调节阀气开气关形式的选择,主要从工艺生产的安全来考虑的。详见例题3-5 气开气关调节阀的选择主要是从生产安全角度和工艺要求考虑的,当信号压力中断时应避免损坏设备和伤害操作人员。如阀门处于开的位置时危害性小,则应选气关式反之选用气开式。 3.控制器正反方向判断 P133 《 自动控制原理B 》 试题A 卷答案 一、单项选择题(本大题共5小题,每小题2分,共10分) 1.若某负反馈控制系统的开环传递函数为 5 (1) s s +,则该系统的闭环特征方程为 ( D )。 A .(1)0s s += B. (1)50s s ++= C.(1)10s s ++= D.与是否为单位反馈系统有关 2.梅逊公式主要用来( C )。 A.判断稳定性 B.计算输入误差 C.求系统的传递函数 D.求系统的根轨迹 3.关于传递函数,错误的说法是 ( B )。 A.传递函数只适用于线性定常系统; B.传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响; C.传递函数一般是为复变量s 的真分式; D.闭环传递函数的极点决定了系统的稳定性。 4.一阶系统的阶跃响应( C )。 A .当时间常数较大时有超调 B .有超调 C .无超调 D .当时间常数较小时有超调 5. 如果输入信号为单位斜坡函数时,系统的稳态误差为无穷大,则此系统为( A ) A . 0型系统 B. I 型系统 C. II 型系统 D. III 型系统 二、填空题(本大题共7小题,每空1分,共10分) 1.一个自动控制系统的性能要求可以概括为三个方面:___稳定性、快速性、__准确性___。 2.对控制系统建模而言,同一个控制系统可以用不同的 数学模型 来描述。 3. 控制系统的基本控制方式为 开环控制 和 闭环控制 。 4. 某负反馈控制系统前向通路的传递函数为()G s ,反馈通路的传递函数为()H s ,则系统 的开环传递函数为()()G s H s ,系统的闭环传递函数为 () 1()() G s G s H s + 。 5 开环传递函数为2(2)(1) ()()(4)(22) K s s G s H s s s s s ++= +++,其根轨迹的起点为0,4,1j --±。 6. 当欠阻尼二阶系统的阻尼比减小时,在单位阶跃输入信号作用下,最大超调量将 增大 。 7.串联方框图的等效传递函数等于各串联传递函数之 积 。 三、简答题(本题10分) 图1为水温控制系统示意图。冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。冷水流量变化用流量计测量。试绘制系统方框图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么? 过程控制系统试卷C卷 一、填空题(每空1.5分)(本题33分) 1、过程控制系统一般由控制器、执行器、被控过程和测量变送等环组成。 2、过程控制系统由工程仪表和被控过程两部分组成。 3、压力检测的类型有三种,分别为:弹性式压力检测、应变式压力检测、压阻式压力检测。 4、气动执行结构主要有薄膜式和活塞式两大类。 5、根据使用的能源不同,调节阀可分为气动调节阀、电动调节阀和液动调节阀三大类。 6、过程数学模型的求取方法一般有机理建模、试验建模和混合建模。 7、积分作用的优点是可消除稳态误差(余差),但引入积分作用会使系统稳定性下降。 8、在工业生产中常见的比值控制系统可分为单闭环比值控制、双闭 环比值控制和变比值控制三种。 9、造成积分饱和现象的内因是控制器包含积分控制作用,外因是控制器长 期存在偏差。 二、名词解释题(每小题5分)(本题15分) 1、过程控制:指根据工业生产过程的特点,采用测量仪表、执行机构和计算机等自动化工具,应用控制理论,设计工业生产过程控制系统,实现工业生产过程自动化。 2、串级控制系统:值采用两个控制器串联工作,主控制器的输出作为副控制器的设定值,由副控制器的输入去操纵调节阀,从而对住被控变量具有更好的控制效果。 3、现场总线:是指将现场设备与工业控制单元、现场操作站等互联而成的计算机网络,具有全数字化、分散、双向传输和多分枝的特点,是工业控制网络向现场级发展的产物。 三、简答题(每小题8分)(本题32分) 1、什么是PID,它有哪三个参数,各有什么作用?怎样控制? 答:PID是比例-积分-微分的简称。其三个参数及作用分别为:(1)比例参数KC,作用是加快调节,减小稳态误差。(2)积分参数Ki,作用是减小稳态误差,提高无差度(3)微分参数Kd,作用是能遇见偏差变化趋势,产生超前控制作用,减少超调量,减少调节时间。 2、前馈与反馈的区别有哪些? 答:(1)控制依据:反馈控制的本质是“基于偏差来消除偏差”,前馈控制是“基于扰动消除扰动对被控量的影响”。 模拟试题(自动控制原理) 1. 本试卷共六大题,满分100分,考试时间90分钟,闭卷; 第一部分:选择题 一、单项选择题(本大题共15小题,每小题3分,共45分) 2.衡量系统稳态精度的重要指标时( C )。 A.稳定性 B.快速性 C.准确性 D.安全性 2.火炮自动瞄准系统的输入信号是任意函数,这就要求被控量高精度地跟随给定值变化,这种控制系统叫( C )。 A.恒值调节系统 B.离散系统 C.随动控制系统 D.数字控制系统 3.某典型环节的传递函数是,则该环节是( D )。 A.积分环节 B.比例环节 C.微分环节 D.惯性环节 4. 关于传递函数,错误的说法是( D )。 A.传递函数只适用于线性定常系统 B.传递函数完全取决于系统的结构参数,给定输入和扰动对传递函数没有影响 C.传递函数一般是为复变量s的真分式 D.闭环传递函数的零点决定了系统的稳定性 5.高阶系统的主导闭环极点越靠近虚轴,则系统的( C )。 A.准确度越高B.准确度越低 C.响应速度越慢 D.响应速度越快 6.系统渐近线与实轴正方向夹角为( B )。 A、90° B、90°、270° C、270° D、无法确定 7.已知单位负反馈系统的开环传开环传递函数为,则当K为下列哪个选项时系统不稳定( D )。 A.5 B. 10 C. 13 D. 16 8.对于绘制根轨迹的基本法则,以下说法不正确的是( C )。 A.根轨迹对称于实轴 B.根轨迹的分支数等于系统的阶数 C. 根轨迹以开环零点为起点,以开环极点为终点 D. 根轨迹与虚轴相交意味着闭环特征方程出现纯虚根 9.某闭环系统的开环传递函数为,则该系统为( D )。 A.0型系统,开环放大系数K=8 B.0型系统,开环放大系数K=2 C.I型系统,开环放大系数K=8 D.I型系统,开环放大系数K=2 10.系统的开环传递函数如下所以,其中属于最小相位系统的是( A )。 11.关于线性系统稳态误差,正确的说法是( A )。 A.增加系统前向通道中的积分环节个数可以提高系统的无稳态误差的等级 B.I型系统在跟踪斜坡输入信号时无误差 C.减小系统开环增益K可以减小稳态误差 D.增加积分环节可以消除稳态误差,而且不会影响系统稳定性 12.已知单位反馈系统的开环传递函数为,则根据频率特性的物理意义,该闭环系统输入信号为r(t)=sin3t 时系统的稳态输出为( B )。 A. 0.354sin3t B.0.354sin(3t-450) C. 0.354sin(3t+450) D.0.354sin(t-450) 2017年自动控制原理期末考试卷与答案 一、填空题(每空 1 分,共20分) 1、对自动控制系统的基本要求可以概括为三个方面,即: 稳定性 、快速性和 准确性 。 2、控制系统的 输出拉氏变换与输入拉氏变换在零初始条件下的比值 称为传递函数。 3、在经典控制理论中,可采用 劳斯判据(或:时域分析法)、根轨迹法或奈奎斯特判据(或:频域分析法) 等方法判断线性控制系统稳定性。 4、控制系统的数学模型,取决于系统 结构 和 参数, 与外作用及初始条件无关。 5、线性系统的对数幅频特性,纵坐标取值为20lg ()A ω(或:()L ω),横坐标为lg ω 。 6、奈奎斯特稳定判据中,Z = P - R ,其中P 是指 开环传函中具有正实部的极点的个数,Z 是指 闭环传函中具有正实部的极点的个数,R 指 奈氏曲线逆时针方向包围 (-1, j0 )整圈数。 7、在二阶系统的单位阶跃响应图中,s t 定义为 调整时间 。%σ是超调量 。 8、设系统的开环传递函数为12(1)(1) K s T s T s ++频特性为 01112()90()() tg T tg T ?ωωω--=---。 9、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。 10、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+,则该系统的传递函数G(s)为 105 0.20.5s s s s + ++。 11、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 闭环控制系统;含有测速发电机的电动机速度控制系统,属于 闭环控制系统。 12、根轨迹起始于开环极点,终止于开环零点。 13、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统 稳定。判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据;在频域分析中采用奈奎斯特判据。 14、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值越频率c ω对应时域性能指标 调整时间s t ,它们反映了系统动态过程的快速性 第1章过程控制 1-1 过程控制有哪些主要特点?为什么说过程控制多属慢过程参数控制? 解:1.控制对象复杂、控制要求多样 2. 控制方案丰富3.控制多属慢过程参数控制4.定值控制是过程控制的一种主要控制形式5.过程控制系统由规范化的过程检测控制仪表组成 1-2 什么是过程控制系统?典型过程控制系统由哪几部分组成? 解:过程控制系统:一般是指工业生产过程中自动控制系统的变量是温度、压力、流量、液位、成份等这样一些变量的系统。 组成:由被控过程和过程检测控制仪表(包括测量元件,变送器,调节器和执行器)两部分组成。 1-4 说明过程控制系统的分类方法,通常过程控制系统可分为哪几类? 解:分类方法说明:按所控制的参数来分,有温度控制系统、压力控制系统、流量控制系统等;按控制系统所处理的信号方式来分,有模拟控制系统与数字控制系统;按控制器类型来分,有常规仪表控制系统与计算机控制系统;按控制系统的结构和所完成的功能来分,有串级控制系统、均匀控制系统、自适应控制系统等;按其动作规律来分,有比例(P)控制、比例积分(PI)控制,比例、积分、微分(PID)控制系统等;按控制系统组成回路的情况来分,有单回路与多回路控制系统、开环与闭环控制系统;按被控参数的数量可分为单变量和多变量控制系统等。 通常分类:1.按设定值的形式不同划分:(1)定值控制系统(2)随动控制系统(3)程序控制系统 2.按系统的结构特点分类:(1)反馈控制系统(2)前馈控制系统(3)前馈—反馈复合控制系统 1-5 什么是定值控制系统 解:在定值控制系统中设定值是恒定不变的,引起系统被控参数变化的就是扰动信号。 1-6 什么是被控对象的静态特性?什么是被控对象的动态特性?二者之间有什么关系? 解:被控对象的静态特性:稳态时控制过程被控参数与控制变量之间的关系称为静态特性。 被控对象的动态特性:。系统在动态过程中,被控参数与控制变量之间的关系即为控制过程的动态特性。 1-7 试说明定值控制系统稳态与动态的含义。为什么在分析过程控制系统得性能时更关注其动态特性? 解:稳态:对于定值控制,当控制系统输入(设定值和扰动)不变时,整个系统若能达到一种平衡状态,系统中各个组成环节暂不动作,它们的输出信号都处于相对静止状态,这种状态称为稳态(或静态)。 动态:从外部扰动出现、平衡状态遭到破坏、自动控制装置开始动作,到整个系统又建立新的稳态(达到新的平衡)、调节过程结束的这一段时间,整个系统各个环节的状态和参数都处于变化的过程之中,这种状态称为动态。 控制系统数字仿真题库 填空题 1.定义一个系统时,首先要确定系统的;边界确定了系统的范围,边界以外对系统的作用称为系统的,系统对边界以外环境的作用称为系统的。 1.定义一个系统时,首先要确定系统的边界;边界确定了系统的范围,边界以外对系统的作用称为系统的输入,系统对边界以外环境的作用称为系统的输出。 2.系统的三大要素为:、和。 2.系统的三大要素为:实体、属性和活动。 3.人们描述系统的常见术语为:、、和 3.人们描述系统的常见术语为:实体、属性、事件和活动。 4.人们经常把系统分成四类,分别为:、、和 4.人们经常把系统分成四类,它们分别为:连续系统、离散系统、采样数据系统和离散-连续系统。 5、根据系统的属性可以将系统分成两大类:和。 5、根据系统的属性可以将系统分成两大类:工程系统和非工程系统。 6.根据描述方法不同,离散系统可以分为: 和。 6.根据描述方法不同,离散系统可以分为:离散时间系统和离散事件系统。 7. 系统是指相互联系又相互作用的的有机组合。 7. 系统是指相互联系又相互作用的实体的有机组合。 8.根据模型的表达形式,模型可以分为和数学模型二大类,期中数学模型根据数学表达形式的不同可分为二种,分别为:和。8.根据模型的表达形式,模型可以分为物理模型和数学模型二大类,期中数学模型根据数学表达形式的不同可分为二种,分别为:静态模型和动态模型。 9.连续时间集中参数模型的常见形式为有三种,分别为:、和。 9.连续时间集中参数模型的常见形式为有三种,分别为:微分方程、状态方程和传递函数。 10、采用一定比例按照真实系统的样子制作的模型称为,用数学表达式来描述系 统内在规律的模型称为。 10、采用一定比例按照真实系统的样子制作的模型称为物理模型,用数学表达式来描述系统 内在规律的模型称为数学模型。 11.静态模型的数学表达形式一般是方程和逻辑关系表达式等,而动态模型的数学表达形式一般是方程和方程。 11.静态模型的数学表达形式一般是代数方程和逻辑关系表达式等,而动态模型的数 自动控制原理试卷与答案 一、填空题 1、反馈控制又称偏差控制,其控制作用是通过稳定性与反馈量的差值进行的 2、在水箱水温控制系统中,受控对象为水箱,被控量为水温。 3、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为开环控制系统;;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为闭环控制系统;含有测速发电机的电动机速度控制系统,属于闭环控制系统。 4、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。 5、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型有微分方程、函数等 6.闭环控制系统又称为反馈控制系统。 7.一线性系统,当输入是单位脉冲函数时,其输出象函数与传递函数相同 8.控制系统线性化过程中,线性化的精度和系统变量的时间常数T有关。 9、.PID调节中的“P”指的是比例控制器 10.对控制系统的首要要求是系统具有稳定性。 11.反馈控制原理是检测偏差并纠正偏差的原理 12.根据采用的信号处理技术的不同,控制系统分为模拟控制系统和数学控制系统。 13、由控制器(含测量元件)和被控制对象组成的有机整体称为自动控制系统。 14、闭环系统是指系统输出量直接或地参与系统的控制的作用。 15、开环控制系统与闭环系统相互结合的控制方式是复合控制 16只有一个反馈通道的系统是单回路系统。 17、描述系统各个物理量之间关系的数学表达式或图形称为系统的数学模型 18、过渡过程的三要素是起始值、稳定值、时间常数 19从一个状态进入另一个稳态的中间过程叫做过渡过程或动态过程。 20、换路定律表明了换路前与换路后瞬间电路的工作状态之间的关系。 二、选择题 1、采用负反馈形式连接后,则 ( D ) A 、一定能使闭环系统稳定; B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 2、下列哪种措施对提高系统的稳定性没有效果 ( A )。 A 、增加开环极点; B 、在积节分环外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。 3、关于传递函数,错误的说法是 ( B ) A 传递函数只适用于线性定常系统; B 传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响; C 传递函数一般是为复变量s 的真分式; D 闭环传递函数的极点决定了系统的稳定性。 4、下列哪种措施对改善系统的精度没有效果 ( C )。 A 、增加积分环节 B 、提高系统的开环增益K C 、增加微分环节 D 、引入扰动补偿 5、高阶系统的主导闭环极点越靠近虚轴,则系统的 ( D ) 。 A 、准确度越高 B 、准确度越低 C 、响应速度越快 D 、响应速度越慢 6. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( D ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件 7 系统和输入已知,求输出并对动态特性进行研究,称为( C ) A.系统综合 B.系统辨识 C.系统分析 D.系统设计 8. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( D ) A.比例环节 B.微分环节 C.积分环节 D.惯性环节 9 某典型环节的传递函数是()1 51+=s s G ,则该环节是( B ) A.比例环节 B.积分环节 C.惯性环节 D.微分环节 10、设一阶系统的传递函数是()1 2+=s s G ,且容许误差为5%,则其调整时间为( C ) A.1 B.2 C.3 D.4 11、与开环控制系统相比较,闭环控制系统通常对( B )进行直接或间接地测量,通过反馈环节去影响控制信号。 A.输出量 B.输入量 C.扰动量 D.设定量 过程控制系统试题一 一、选择题(10×3分) 1、过程控制系统由几大部分组成,它们是:( c ) A.传感器、变送器、执行器 B.控制器、检测装置、执行机构、调节阀门 C. 控制器、检测装置、执行器、被控对象 D. 控制器、检测装置、执行器 2、在过程控制系统过渡过程的质量指标中, ( A )反映控制系统稳定程度的指标 A.超调量 B.衰减比 C.最大偏差 D.振荡周期 3、下面对过程的控制质量没有影响的是: ( D ) A .控制通道放大倍数K B.扰动通道放大倍数K Of C.扰动通道时间常数 D.扰动通道纯滞后时间 4、在对象特性中,( )是静特性。 A. 放大系数Κ B. 时间常数T C.滞后时间τ D.传递函数 5、选择调节参数应尽量使调节通道的( ) A.功率比较大 B.放大系数适当大 C.时间常数适当小 D.滞后时间尽量小 6、在简单控制系统中,接受偏差信号的环节是( )。 A .变送器 B. 控制器, C. 控制阀 D. 被控对象 7、下列说法正确的是( )。 A. 微分时间越长,微分作用越弱; B. 微分时间越长,微分作用越强; C. 积分时间越长,积分时间越弱; D. 积分时间越长,积分时间越强。 8、调节阀按其使用能源不同可分为( )三种。 A(电动 B(液动 C(气动 D(压动 9、打开与控制阀并联的旁路阀,会使可调比(A)。 A.变小 B.变大 C.不变 D. 为零 10、串级控制系统主、副对象的时间常数之比,T/T,( )为好,主、副回路恰能发挥其优0102 越性,确保系统高质量的运行。 A. 3,10 B. 2,8 C. 1,4 D. 1,2 二、判断题(10×2分) 1、过程控制系统中,需要控制的工艺设备(塔、容器、贮糟等)、机器称为被控对象。( ) 2、调节阀的结构形式的选择首先要考虑价格因素。( ) 3、当生产不允许被调参数波动时,选用衰减振荡形式过渡过程为宜。( ) 4、临界比例度法是在纯比例运行下进行的。通过试验,得到临界比例度δ和临界周期T,然后KK根据经验总结出来的关系,求出调节器各参数值。( ) 5、一般来说,测量变送环节的作用方向总是正的。( ) 6、均匀控制系统单从结构上看与简单控制是不同的。( ) 7、采取分程控制通常可以提高控制阀的可调比。( ) 8、积分饱和通常不影响控制系统品质。( ) 9、干扰进入调节系统的位置离调节阀越近,离测量元件越远,调节质量越好。( ) 10、串级调节系统要求对主参数和副参数均应保证实现无差控制。( ) 三、简答题(4×5分) 1、按照设定值的不同形式, 过程控制系统可分为哪几类, 2、何为控制阀的理想流量特性和工作流量特性,常用的调节阀理想流量特性有哪些, 3、前馈控制与反馈控制的区别有哪些, 4、什么叫积分饱和,在选择性控制系统中防止积分饱和的方法一般有几种, 四、(10分)某化学反应过程要求参与反应的A、B两物料保持 F:F,4:2.5AB 的比例,两物料的最大流量 3F,625m/hAmax , 3F,290m/hBmax 自动控制原理模拟试题6 一、简答(本题共6道小题,每题5分,共30分) 1、画出二阶系统特征根的位置与响应曲线之间的关系。 2、通过二阶系统的根轨迹说明,增加开环零点和增加开环极点对系统根轨迹走向的影响。 3、已知某环节的频率特性曲线如下,求当x(t)=10sin5t 输入该环节的时候,系统的输出解析表达式是什么? 4、通常希望系统的开环对数频率特性,在低频段和高频段有较大的斜率,为什么? 5、如果一个控制系统的阻尼比比较小,请从时域指标和频域指标两方面说明该系统会有什么样的表现?并解释原因。 6、最小相位系统的Nyquist 图如下所示,画出图示系统对应的 Bode 图,并判断系统的稳定性。 二、改错(本题共5道小题,每题5分,共25分) 1. 微分方程的拉氏变换可以得到系统的传递函数,系统传递函数的拉氏反变换是微分方程。 2. 传递函数描述系统的固有特性。其系数和阶次都是实数,只与系统内部结构参数有关而与输入量初始条件等外部因素无关。 3. 频率法不仅研究一个系统对不同频率的正弦波输入时的响应特性,也研究系统对阶跃信号的响应特性。 4. 系统开环对数频率特性的中频段的长度对相位裕量有很大影响,中频段越长,相位裕量越小。 W k (j 40 20 - π/2 - π ?(ω) 5. Nyquist 图中()1k W j ω>的部分对应Bode 图中0dB 线以下的区段,Nyquist 图中的实 轴对应Bode 图中的π-线。 三、 设单位反馈系统的开环传递函数(本题20分) i s T s K s T K K s G m m f f 1)1(1)(0?+?+?= 输入信号为 )(1)()(t bt a t r ?+= 其中0K , m K , f K , i, f T , m T 均为正数 ,a 和b 为已知正常数。如果要求闭环系统稳 定,并且稳态误差ss e <0ε, 其中0ε>0, 试求系统各参数满足的条件。 四、试用梅逊增益公式求下图中各系统信号流图的传递函 数C(s)/R(s)。(15分) 五、(本题20分) 设单位反馈控制系统的开环传递函数 )102.0)(101.0()(++=s s s K s G 要求: (1) 画出准确根轨迹(至少校验三点,包括与虚轴交点); (2) 确定系统的临界稳定开环增益K c; (3)当一个闭环极点是-5的时候,确定此时的其他极点。 六、已知最小相位系统的对数幅频渐近特性曲线如图所示, 1) 试确定系统的开环传递函数; 2) 求解系统的相位裕量,并判断稳定性; 3) 广东技术师范学院 2010—2011学年度第 一学期期未考查试卷 科 目:控制系统仿真 (B )卷 考试形式:上机考试 考试时间: 120 分钟 所属学院:自动化学院 班级: 姓名: 学号: 答题注意事项:以下题目请大家在计算机上完成,并将结果写成电子文档上交。电子文档中应包含以下几项内容:仿真程序代码、仿真结果截图、仿真实验结论。 1.设单位负反馈系统的开环传递函数为) 5)(2()(2++= s s s K s G k ,试确定分别使 闭环系统稳定的开环增益的取值范围。(20分) 程序如下: num=1; den=conv([1 2 0 0],[1 5]); G=tf(num,den); k=0:0.05:100; rlocus(G) [K,P]=rlocfind(G) 题 目 一 二 三 四 五 总分 标准分数 20 20 20 20 20 100 实得分数 评卷人 装 订 线 考 生 答 题 不 得 超 过 此 线 Select a point in the graphics window selected_point = 0.0024 + 0.3230i K = 1.0607 P = -4.9857 -2.0838 0.0347 + 0.3176i 0.0347 - 0.3176i 运行结果: K=1.0607; t=0:0.05:100; G0=feedback(tf(K*num,den),1); step(G0,t) 由上图分析可得,系统的临界稳定增益是1.0607,因此该闭环系统稳定的开环增益的取值范围是0~1.0607,随着增益的增加系统趋于发散统系统 2、试求以下单位负反馈系4 1 )(2++=s s s G k 的单位阶跃响应曲线,并求其动态性能 指标r p s t t t %σ。 num=1; den=[1 1 4]; G=tf(num,den); Gk=feedback(G ,1) figure(1);控制系统仿真试题参考2解析
自动控制原理-期末考试试题卷
最新过程控制系统考试试题汇总
自动控制原理模拟题及答案
控制系统仿真期末考试题及答案
自动控制原理期中试题
过程控制系统试题一
自动控制原理期末考试题
过程控制系统试卷及答案
模拟考试题(自动控制原理)
自动控制原理期末考试试卷(含答案)
过程控制系统与仪表习题答案汇总 (1)
控制系统数字仿真题库
(完整版)自动控制原理试卷与答案(1)
过程控制系统试题一
自动控制原理模拟试题
MATLAB控制系统仿真试题B卷.doc
相关主题
文本预览