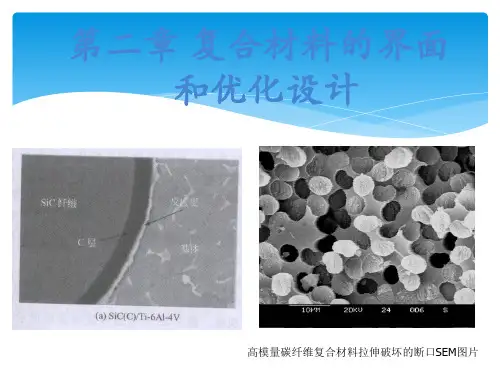
第二章 优化设计
- 格式:ppt
- 大小:3.60 MB
- 文档页数:191
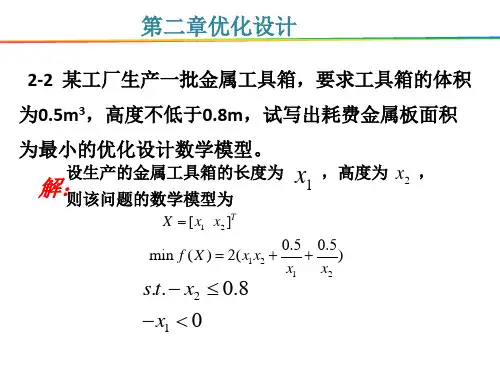
第二章 优化设计模拟试题一、单项选择题1、优化设计的自由度是指( )。
A 、设计空间的维数B 、可选优化方法数C 、所提目标函数数D 、所提约束条件数 2、在约束优化方法中,容易处理含等式约束条件的优化设计方法是( )。
A 、可行方向法 B 、复合形法 C 、内点罚函数法 D 、外点罚函数法 3、如果目标函数的导数求解困难时,适宜选择的优化方法为( )。
A 、梯度法 B 、变尺度法 C 、共轭梯度法 D 、Powell 法4、对于2个变量的函数F(X)的Hessian 矩阵是2×2的二阶偏导数矩阵,该矩阵是( )。
A 、三角矩阵 B 、对称矩阵 C 、非对称矩阵 D 、分块矩阵5、函数122214x x x )X (F -+=在点(2,0)处的梯度为( )。
A 、{2,0} B 、{0,0} C 、{0,2} D 、{2,2}6、0.618法在迭代运算过程中,迭代区间不断缩小,其区间的缩小率在迭代运算过程中( )。
A 、逐步变小 B 、不变 C 、逐步变大 D 、不确定7、下列关于函数梯度的说法不正确的是( )。
A 、函数的梯度是标量B 、函数的梯度是矢量C 、函数值沿梯度方向变化最大D 、求函数的极小值时常沿负梯度方向搜索 8、一个单值、连续、可微的不受任何约束的一元函数F(X),再x=x *点处有极小值的充分条件是( )。
A 、F ’(x *)=0 B 、F ’(x *)=0 , F ’’(x *)>0 C 、F ’’(x *)=0 D 、F ’(x *)=0, F ’’(x *)<0 9、多元函数F(X)在x *点附近一阶偏导数连续,则该点为极大值点的充分条件为( )。
A 、∇F(X *) =0B 、∇F(X *) =0 ,H(X *) 正定C 、H(X *)=0D 、∇F(X *) =0,H(X *) 负定10、黄金分割法中,每次缩短后的新区间长度与原区间长度的比值始终是一个常数,此常数是( )。
第2章优化设计优化设计是指通过改进设计方案,提高产品的性能、质量、效率等方面的方法。
在设计过程中,优化设计可以从多个角度进行,包括材料选用、结构设计、制造工艺等方面的优化。
一、材料选用优化在产品设计中,材料的选用对产品的性能和质量有很大的影响。
优化材料选用可以从以下几个方面进行:1.1材料的物理性能:选择具有高强度、高韧性、高导热性等物理性能的材料,以提高产品的耐用性和效率。
1.2材料的化学性能:选择具有耐腐蚀、耐高温、耐磨损等化学性能的材料,以增强产品的抗腐蚀、抗高温和抗磨损能力。
1.3材料的成本效益:在满足产品性能要求的前提下,选择成本较低的材料,以降低产品的制造成本。
二、结构设计优化在产品设计中,结构设计的优化可以改进产品的稳定性、刚性、可靠性等方面。
结构设计优化可以从以下几个方面进行:2.1结构的设计简洁性:通过简化结构,减少零部件数量和复杂度,降低产品的故障率和维修成本。
2.2结构的刚性设计:通过增加结构的刚性,提高产品的稳定性和精度,提升产品的性能和品质。
2.3结构的可靠性设计:在设计中考虑产品的可维修性和可更换性,以便在产品故障时能够快速维修或更换部件,减少停机时间和维修成本。
三、制造工艺优化在产品设计中,制造工艺的优化可以降低产品的制造成本、提高制造效率。
制造工艺优化可以从以下几个方面进行:3.1工艺流程的简化:通过简化工艺流程,减少制造步骤和工时,提高产品的制造效率。
3.2制造设备的优化:选择适合产品制造的设备,提高设备的利用率和生产线的产能,降低产品的制造成本。
3.3制造工艺的标准化:制定制造工艺的标准化流程和规范,降低产品的制造变异度,提高产品的一致性和品质。
优化设计的目标是通过改进设计方案,提高产品的性能、质量、效率等方面的指标。
通过材料选用、结构设计和制造工艺等方面的优化,可以提高产品的竞争力和市场份额,实现企业的可持续发展。
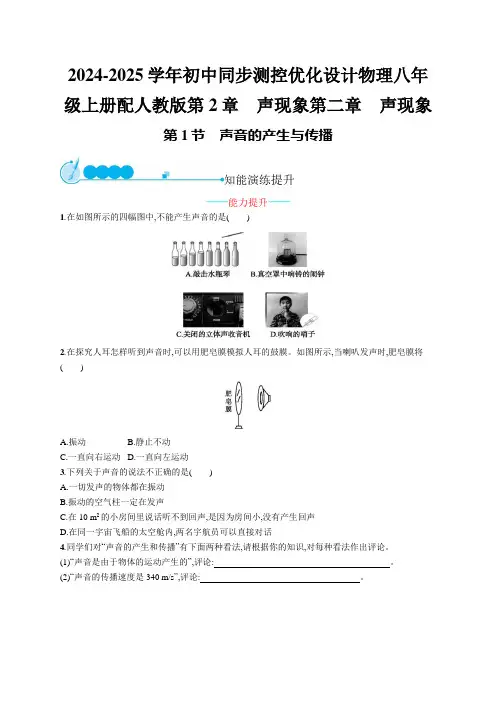
2024-2025学年初中同步测控优化设计物理八年级上册配人教版第2章声现象第二章声现象第1节声音的产生与传播知能演练提升能力提升1.在如图所示的四幅图中,不能产生声音的是()2.在探究人耳怎样听到声音时,可以用肥皂膜模拟人耳的鼓膜。
如图所示,当喇叭发声时,肥皂膜将()A.振动B.静止不动C.一直向右运动D.一直向左运动3.下列关于声音的说法不正确的是()A.一切发声的物体都在振动B.振动的空气柱一定在发声C.在10 m2的小房间里说话听不到回声,是因为房间小,没有产生回声D.在同一宇宙飞船的太空舱内,两名宇航员可以直接对话4.同学们对“声音的产生和传播”有下面两种看法,请根据你的知识,对每种看法作出评论。
(1)“声音是由于物体的运动产生的”,评论:。
(2)“声音的传播速度是340 m/s”,评论:。
5.如图所示,敲响右边的音叉,左边完全相同的音叉也会发声,说明声音可以在中传播;还可以观察到紧挨音叉的塑料球弹起,说明声音是由产生的。
6.已知人耳区分两次声音的时间间隔为0.1 s以上,现有一根长为8.5 m的铁管,如果你将耳朵贴在铁管的一端,让另一个人去敲击一下铁管的另一端,则敲击声由空气传入你的耳朵需要 s,你会听到次敲打的声音。
(已知声音在空气中的传播速度为340 m/s,在铁中传播速度为5 200 m/s)7.观察下表,试写出两个与声音传播速度有关的结论。
一些介质中的声速v/(m·s-1)结论:(1)。
(2)。
探究创新★8.声音传播的速度和温度有关,下表是空气中声速随温度变化的数据:(1)请你在如图所示的坐标系中作出声速和温度关系的图像。
(2)请你根据所作图像找出温度为-5 ℃时声速为 m/s。
知能演练·提升1.C声音是由物体的振动产生的。
敲击水瓶琴,水瓶琴振动发出声音;真空罩中响铃的闹钟振动发声,只是声音没有被传播出来;关闭的立体声收音机,不会产生声音;吹响的哨子,里面的空气柱振动发声。
第二章优化设计的数学基础优化设计是指通过调整设计要素,使得设计达到最佳状态的过程。
在实际应用中,优化设计可以应用于各个领域,包括工程设计、经济决策、生产流程以及物流等等。
在进行优化设计时,我们需要依赖数学的基础知识和方法。
本文将介绍一些常用的数学基础,帮助我们更好地理解和应用优化设计。
首先,优化设计离不开数学模型的建立。
数学模型是对实际问题进行抽象和描述的工具。
它可以将实际问题转化为数学问题,从而进行具体的计算和推理。
常见的数学模型包括线性规划模型、非线性规划模型、整数规划模型等等。
通过建立数学模型,我们可以对设计进行量化和形式化的描述,为后续的优化设计提供依据。
其次,数学中的最优化理论也是优化设计的重要基础。
最优化理论主要研究如何在给定的约束条件下,找到使目标函数达到最优值的决策变量取值。
最优化问题可以分为无约束优化和约束优化两种情况。
无约束优化即在没有约束条件下寻求最优解,而约束优化则在给定一定约束条件下寻找最优解。
在实际的优化设计中,往往需要处理复杂的问题,例如多目标优化、多变量优化等等,并应用最优化理论来解决这些问题。
另外,数值方法是优化设计中不可或缺的工具。
数值方法通过使用数值计算的方法,对优化问题进行求解。
常见的数值方法有穷差法、梯度法、遗传算法等等。
这些方法通过迭代计算的方式,逐步接近最优解。
在实际中,由于优化问题的复杂性,往往难以找到解析解,因此数值方法的应用变得尤为重要。
最后,敏感性分析也是优化设计中的重要工具。
敏感性分析主要研究问题中各个因素对最优解的影响程度。
通过敏感性分析,我们可以了解到设计要素的重要性,从而进行针对性的调整和优化。
敏感性分析方法包括参数敏感性分析、目标函数敏感性分析等等。
通过敏感性分析,我们可以进一步了解设计问题,为优化设计提供实际的参考意见。
综上所述,数学是优化设计的基础。
通过数学模型的建立、最优化理论的应用、数值方法的求解以及敏感性分析的研究,我们能够更好地理解和应用优化设计。