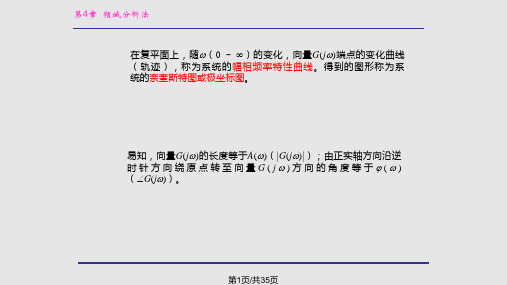
机械工程控制基础(1)_共34页
- 格式:ppt
- 大小:3.21 MB
- 文档页数:34
第一部分:单选题1.自动控制系统的反馈环节中必须具有[ ] a.给定元件 b .检测元件 c .放大元件 d .执行元件2. 在直流电动机的电枢回路中,以电流为输出,电压为输入,两者之间的传递函数是[ ] a .比例环节 b .积分环节 c .惯性环节 d .微分环节3. 如果系统不稳定,则系统 [ ]a.不能工作 b .可以工作,但稳态误差很大c .可以工作,但过渡过程时间很长d .可以正常工作4. 在转速、电流双闭环调速系统中,速度调节器通常采用[ ]调节器。
a .比例 b .比例积分 c .比例微分 d .比例积分微分5.单位阶跃函数1(t)的拉氏变换式L[1(t)]为[ ]:a .S b. S 1c. 21Sd. S 26. 在直流电动机的电枢回路中,以电流为输出,电压为输入,两者之间的传递函数是[ ] A .比例环节 B .积分环节 C .惯性环节 D .微分环节 7.如果系统不稳定,则系统 [ ]A. 不能工作 B .可以工作,但稳态误差很大C .可以工作,但过渡过程时间很长D .可以正常工作8. 已知串联校正网络(最小相位环节)的渐近对数幅频特性如下图所示。
试判断该环节的相位特性是[ ]:[ ]调节器。
[ ]:C. 相位滞后-超前D. 相位超前-滞后12. 开环增益K 增加,系统的稳定性( ):A .变好 B. 变坏 C. 不变 D. 不一定13. 开环传递函数的积分环节v 增加,系统的稳定性( ):A .变好 B. 变坏 C. 不变 D. 不一定14. 已知 f(t)=0.5t+1,其L[f(t)]=( ):A .S+0.5S 2 B. 0.5S 2 C. S S1212 D. S 2115.自动控制系统的反馈环节中必须具有( ):A.给定元件 B .检测元件 C .放大元件 D .执行元件16.PD 调节器是一种( )校正装置。
A .相位超前 B. 相位滞后 C. 相位滞后-超前 D. 相位超前-滞后17.已知最小相位系统的开环对数幅频特性曲线的渐近线如下图所示,试确定其开环增益K ( )。
机械工程控制基础教学大纲(实用版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的实用资料,如工作总结、工作报告、工作计划、心得体会、讲话致辞、教育教学、书信文档、述职报告、作文大全、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor.I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!Moreover, our store provides various types of practical materials for everyone, such as work summaries, work reports, work plans, reflections, speeches, education and teaching, letter documents, job reports, essay summaries, and other materials. If you want to learn about different data formats and writing methods, please stay tuned!机械工程控制基础教学大纲《机械工程控制基础》课程教学大纲一、本课程性质、地位和任务性质:《机械工程控制基础》是机电一体化专业本科段计划规定必考的一门专业基础课。

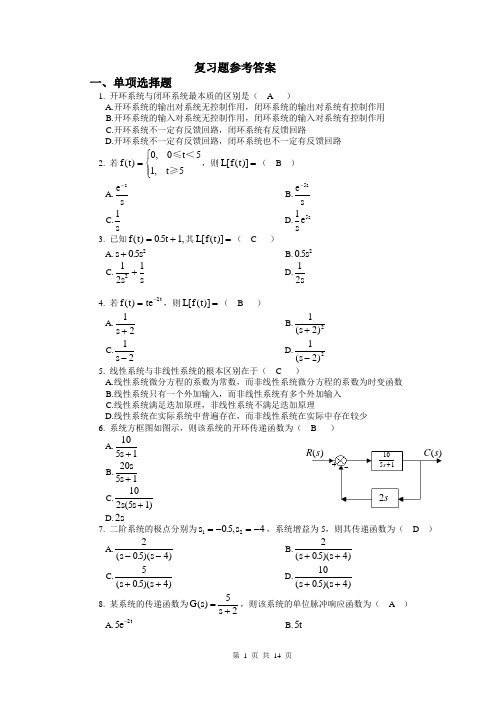
复习题参考答案一、单项选择题1. 开环系统与闭环系统最本质的区别是( A )A.开环系统的输出对系统无控制作用,闭环系统的输出对系统有控制作用B.开环系统的输入对系统无控制作用,闭环系统的输入对系统有控制作用C.开环系统不一定有反馈回路,闭环系统有反馈回路D.开环系统不一定有反馈回路,闭环系统也不一定有反馈回路 2. 若f t t t (),,=⎧⎨⎩⎪00515≤<≥,则L f t [()]=( B )A.ess- B.ess-5C.1sD.15se s3. 已知f t t ().,=+051其L f t [()]=( C ) A.s s +052. B.052.s C.1212ss+D.12s4. 若f t te t ()=-2,则L f t [()]=( B ) A.12s + B.122()s + C.12s -D.122()s -5. 线性系统与非线性系统的根本区别在于( C )A.线性系统微分方程的系数为常数,而非线性系统微分方程的系数为时变函数B.线性系统只有一个外加输入,而非线性系统有多个外加输入C.线性系统满足迭加原理,非线性系统不满足迭加原理D.线性系统在实际系统中普遍存在,而非线性系统在实际中存在较少 6. 系统方框图如图示,则该系统的开环传递函数为( B ) A.1051s + B.2051s s +C.10251s s ()+D.2s7. 二阶系统的极点分别为s s 12054=-=-.,,系统增益为5,则其传递函数为( D )A.2054(.)()s s -- B.2054(.)()s s ++C.5054(.)()s s ++D.10054(.)()s s ++8. 某系统的传递函数为2s 5)s (G +=,则该系统的单位脉冲响应函数为( A )A.52et-B.5t()R s ()C s 1051s +2sC.52e tD.5t9. 二阶欠阻尼系统的上升时间t r 定义为( C )A.单位阶跃响应达到稳态值所需的时间B.单位阶跃响应从稳态值的10%上升到90%所需的时间C.单位阶跃响应从零第一次上升到稳态值时所需的时间D.单位阶跃响应达到其稳态值的50%所需的时间10. 系统类型λ、开环增益K 对系统稳态误差的影响为( A ) A.系统型次λ越高,开环增益K 越大,系统稳态误差越小 B.系统型次λ越低,开环增益K 越大,系统稳态误差越小 C.系统型次λ越高,开环增益K 越小,系统稳态误差越小 D.系统型次λ越低,开环增益K 越小,系统稳态误差越小 11. 一系统的传递函数为G s K T s ()=+1,则该系统时间响应的快速性( C )A.与K 有关B.与K 和T 有关C.与T 有关D.与输入信号大小有关 12. 一闭环系统的开环传递函数为G s s s s s ()()()()=+++83232,则该系统为( C )A.0型系统,开环增益为8B.I 型系统,开环增益为8C.I 型系统,开环增益为4D.0型系统,开环增益为413. 瞬态响应的性能指标是根据哪一种输入信号作用下的瞬态响应定义的( B ) A.单位脉冲函数 B.单位阶跃函数 C.单位正弦函数 D.单位斜坡函数 14.二阶系统的传递函数为G s K s s ()=++2212,当K 增大时,其( C )A.无阻尼自然频率ωn 增大,阻尼比ζ增大B.无阻尼自然频率ωn 增大,阻尼比ζ减小C.无阻尼自然频率ωn 减小,阻尼比ζ减小D.无阻尼自然频率ωn 减小,阻尼比ζ增大15. 所谓最小相位系统是指( B )A.系统传递函数的极点均在S 平面左半平面B.系统开环传递函数的所有零点和极点均在S 平面左半平面C.系统闭环传递函数的所有零点和极点均在S 平面右半平面D.系统开环传递函数的所有零点和极点均在S 平面右半平面 16. 一系统的传递函数为G s s ()=+102,则其截止频率ωb 为( A )A. 2rad s /B.0.5rad s /C.5rad s /D.10rad s /17. 一系统的传递函数为G s K s Ts ()()=+1,则其相位角ϕω()可表达为( B )A.--tg T 1ω B.-︒--901tg T ω C.901︒--tg T ωD.tg T -1ω18. 一系统的传递函数为G s s ()=+22,当输入r t t ()sin =22时,则其稳态输出的幅值为( A ) A.2B.22/C.2D.419. 一单位反馈系统的开环传递函数为G s K s s s ()()()=++12,当K 增大时,对系统性能能的影响是( A ) A.稳定性降低 B.频宽降低 C.阶跃输入误差增大 D.阶跃输入误差减小 20. 一单位反馈系统的开环Bode 图已知,其幅频特性在低频段是一条斜率为-20dB dec/的渐近直线,且延长线与0dB 线的交点频率为ωc =5,则当输入为r t t ().=05时,其稳态误差为( A ) A.0.1 B.0.2 C.0 D.0.5 21. 利用乃奎斯特稳定性判据判断系统的稳定性时,Z P N =-中的Z 表示意义为( D ) A.开环传递函数零点在S 左半平面的个数 B.开环传递函数零点在S 右半平面的个数 C.闭环传递函数零点在S 右半平面的个数 D.闭环特征方程的根在S 右半平面的个数22. 关于劳斯—胡尔维茨稳定性判据和乃奎斯特稳定性判据,以下叙述中正确的是( B )A.劳斯—胡尔维茨判据属代数判据,是用来判断开环系统稳定性的B.乃奎斯特判据属几何判据,是用来判断闭环系统稳定性的C.乃奎斯特判据是用来判断开环系统稳定性的D.以上叙述均不正确23.以下频域性能指标中根据开环系统来定义的是( D ) A.截止频率ωb B.谐振频率ωr 与谐振峰值M r C.频带宽度 D.相位裕量γ与幅值裕量kg 24. 一单位反馈系统的开环传递函数为G s K s s K ()()=+,则该系统稳定的K 值范围为( A )A.K >0B.K >1C.0<K <10D. K >-1 25. 对于开环频率特性曲线与闭环系统性能之间的关系,以下叙述中不正确的有( A ) A.开环频率特性的低频段表征了闭环系统的稳定性 B.中频段表征了闭环系统的动态特性 C.高频段表征了闭环系统的抗干扰能力D.低频段的增益应充分大,以保证稳态误差的要求26. 以下性能指标中不能反映系统响应速度的指标为( D ) A.上升时间t r B.调整时间t s C.幅值穿越频率ωcD.相位穿越频率ωg27. 当系统采用串联校正时,校正环节为G s s s c ()=++121,则该校正环节对系统性能的影响是( D )A.增大开环幅值穿越频率ωcB.增大稳态误差C.减小稳态误差D.稳态误差不变,响应速度降低 28. 串联校正环节G s A s B s c ()=++11,关于A 与B 之间关系的正确描述为( A )A.若G c (s)为超前校正环节,则A >B >0B.若G c (s)为滞后校正环节,则A >B >0C.若G c (s)为超前—滞后校正环节,则A ≠BD.若G c (s)为PID 校正环节,则A=0,B >0 29.适合应用传递函数描述的系统是:( A )A 、单输入,单输出的线性定常系统;B 、单输入,单输出的线性时变系统;C 、单输入,单输出的定常系统;D 、非线性系统。


机械控制工程基础课后答案(廉自生)(同名43)(总34页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--2-1什么是线性系统其最重要特性是什么答:如果系统的数学模型是线性的,这种系统就叫做线性系统。
线性系统最重要的特性,是适用于叠加原理。
叠加原理说明,两个不同的作用函数(输入),同时作用于系统所产生的响应(输出),等于两个作用函数单独作用的响应之和因此,线性系统对几个输入量同时作用而产生的响应,可以一个一个地处理,然后对它们的响应结果进行叠加。
2-2 分别求出图(题2-2)所示各系统的微分方程。
)()(t f t y km(a ))(t y )(t f 21k k m(b )c c 12m x x i o(c )1k 2k oix x c(d )ioc(e )解:)(a )()()(t f t ky t y m =+ )(b )()()()(21t f t y k k t y m =++⋅⋅⋅⋅+=-02010))((x c x m c x xc i 212110)()()()(K K s K K c csK s X s X d i ++= 02010)())((x K c x xK x x e i i =-+-⋅⋅2-3 求图(题2-3)所示的传递函数,并写出两系统的无阻尼固有频率nω及阻尼比ξ的表达式。
x ix ockm(a )Cu u oiLR(b )解:图)(a 有:mk s m c s m k s G ++=2)( m kn =ω mk C 2=ξ图)(b 有:⎪⎪⎩⎪⎪⎨⎧=++=⎰⎰idt C V idt C R L V i i i 110∴ LCs L R s LC s G 11)(2++=LC n 1=ω L C R 2=ξ 2-4 求图(题2-4)所示机械系统的传递函数。
图中M 为输入转矩,m C 为圆周阻尼,J 为转动惯量。
(应注意消去θθ ,及θ) x题2-4解:由已知可知输入量M 与输出量θ之间的关系为:M k C J m =++θθθ经拉氏变换后为:)()()(2s M k s s C s Js m =++θθθ∴ 222222/11)()()(nn n m m s Jk s J C s J k s C Js s M s s G ωξωωθ++=++=++==其中,J kn =ω JkC m 2=ξ2-5 已知滑阀节流口流量方程式为)/2(v ρωp x c Q =,式中,Q 为通过节流阀流口的流量;p 为节流阀流口的前后油压差;v x 为节流阀的位移量;c 为流量系数;ω为节流口面积梯度;ρ为油密度。