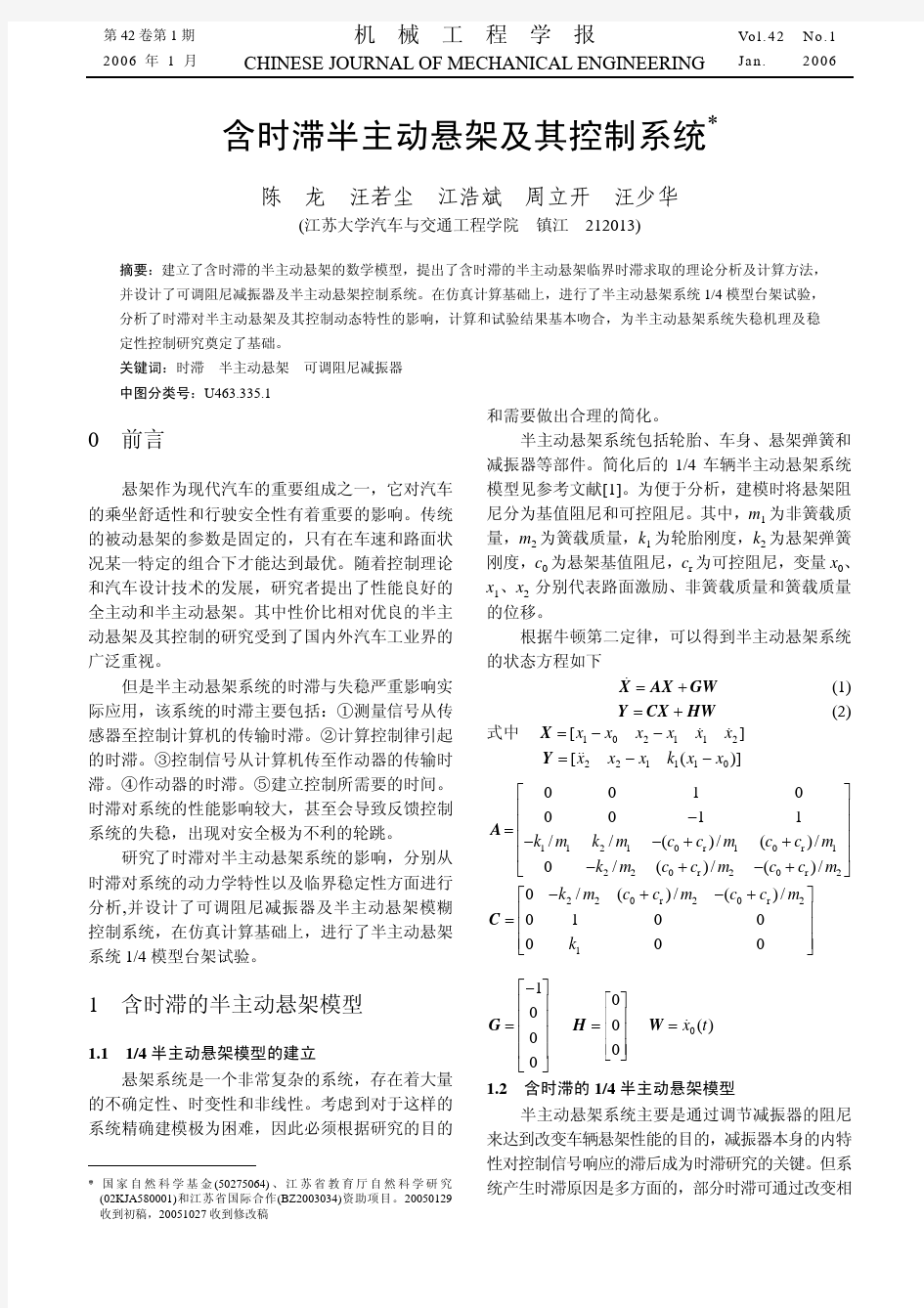
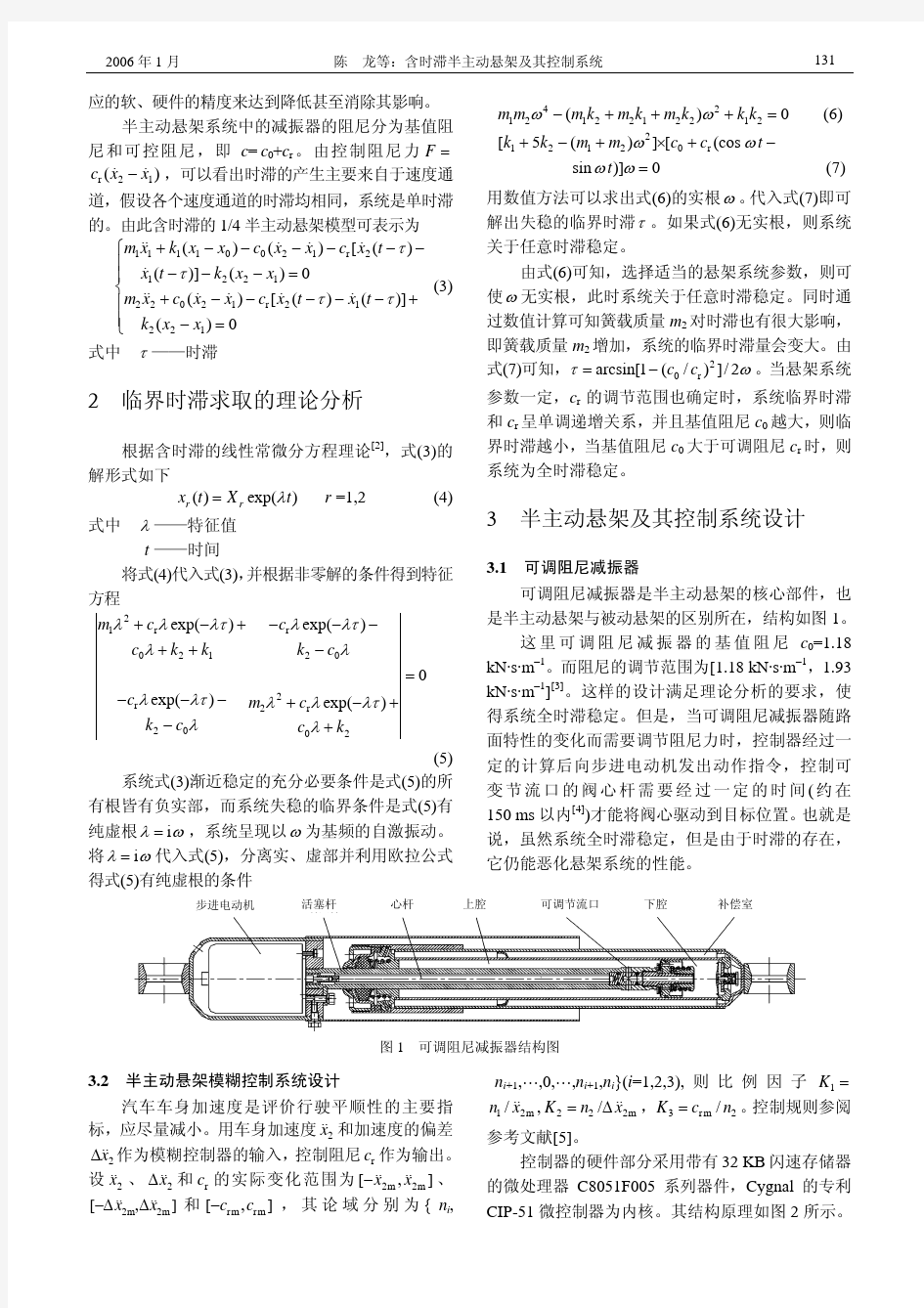
传统的悬架系统的刚度和阻尼是按经验或优化设计的方法确定的,根据这些参数设计的悬架结构,在汽车行驶过程中,其性能是不变的,也是无法进行调节的,使汽车行驶平顺性和乘坐舒适性受到一定影响。故称传统的悬架系统为被动悬架系统。如果悬架系统的刚度和阻尼特性能根据汽车的行驶调节(车辆的运动状态和路面状况等)进行动态自适应调节,使悬架系统始终处于最佳减振状态,则称为主动悬架。 主动悬架系统按其是否包含动力源可以分为全主动悬架(有源主动悬架)和半主动悬架(无源主动悬架)系统两大类。 全主动悬架 全主动悬架是根据汽车的运动状态和路面状态,适时地调节悬架的刚度和阻尼,使其处于最佳减振状态。它是在被动悬架(弹性元件、减振器、导向装置)中附加一个可控作用力的装置。通常由执行机构、测量系统、反馈控制系统和能源系统4部分组成。执行机构的作用是执行控制系统的指令,一般为发生器或转矩发生器(液压缸、气缸、伺服电动机、电磁铁等)。测量系统的作用是测量系统各种状态,为控制系统提供依据,包括各种传感器。控制系统的作用是处理数据和发出各种控制指令,其核心部件是电子计算机。能源系统的作用是为以上各部分提供能量。 半主动悬架 目前,主流的半主动悬架不考虑改变悬架的刚度,而只考虑改变悬架的阻尼,因此它无动力源且只由可控的阻尼元件组成。由于半主动悬架结构简单,工作时几乎不消耗车辆动力,而且还能获得与全主动悬架相近的性能,故有较好的应用前景。 半主动悬架按阻尼级又可以分成有级式和无级式两种。 (1)有级式半主动悬架它是将悬架系统中的阻尼分为两级、三级或更多级,可由驾驶员选择或根据传感器信号自动进行选择悬架所需要的阻尼级。也就是说,可以根据路面条件(好路或坏路)和汽车的行驶状态(转弯或制动)等来调节悬架的阻尼级,使悬架适应外界环境的变化,从而可以较大幅度地提高汽车的行驶平顺性和操纵稳定性。 半主动悬架中的三级阻尼可调减振器的旁路控制阀是由调节电动机来带动阀芯转动,使控制阀孔具有关闭,小开和大开3个位置,产生3个阻尼值。该减振器应用于OPEL SENTOR 和OPELGA轿车上。 (2)无级式半主动悬架它是根据汽车行驶的路面条件和行驶状态,对悬架系统的阻尼在几毫秒内有最小变到最大进行无级调节。
车辆电控悬架的控制与现状 KIMI KANG (南京农业大学工学院,车辆工程) 摘要:汽车电子控制悬架系统的目的是通过控制调节悬架的刚度和减震器阻尼,突破传统被动悬架的局限区域,使汽车的悬架特性与行驶的道路状况相适应,保证平顺性和 操纵性两个相互排斥的性能要求都能得到满足。 关键词:悬架;电子控制;弹簧刚度;减振阻尼力 0引言 传统的汽车悬架一般具有固定的弹簧刚度和减振阻尼力,它只能保证在一种特定的道路状态和速度下达到性能最优,因而不能同时满足汽车行驶平顺性和操纵稳定性的要求。例如降低弹簧刚度,平顺性会更好,乘坐更舒适,但会使操纵稳定性变差;相反,增加弹簧刚度虽可提高操纵稳定性,但会使车辆对路面不平度更敏感,平顺性降低。因此,理想的悬架系统应在不同的行驶条件下具有不同的弹簧刚度和减振器阻尼力,以同时满足平顺性与操纵稳定性的要求。电控悬架系统就是这种理想的悬架系统,它通过对悬架系统参数进行实时控制,使悬架的刚度、减振器的阻尼系数、车身高度能随汽车的载荷、行驶速度、路面状况等行驶条件变化而变化,使悬架性能总是处于最佳状态(或其附近),同时满足汽车的行驶平顺性、操纵稳定性等方面的要求。 1电控悬架的功能与类型 1.1电控悬架的功能 汽车电子控制悬架系统的目的是通过控制调节悬架的刚度和减震器阻尼,突破传统被动悬架的局限区域,使汽车的悬架特性与行驶的道路状况相适应,保证平顺性和操纵性两个相互排斥的性能要求都能得到满足。主要功能包括:车高调整、衰减力控制、弹簧刚度控制、侧倾角刚度控制等。 1.2电控悬架的类型 根据有无力发生器,可将电子控制悬架分为半主动悬架和全主动悬架两大类。 1.2.1半主动悬架 半主动悬架是根据路面冲击、车轮与车体的加速度、速度及位移信号仅实时调节悬架的阻尼系数,消耗来自不平路面的冲击能量,而不需要提供能量,以这种方式来改善悬架缓冲性能。半主动悬架无力发生器,即无源控制,结构简单、造价低、能量消耗小,是目前轿车上较为普遍采用的调节方式。图11-1所示是一种典型的半主动悬架,它是通过改变液压缸上下两腔节流口的过流面积,以调节
时变时滞非线性系统的间歇控制 ?フ? 要:时变时滞广泛存在于各种非线性系统中,研 究了时变时滞非线性系统的间歇控制及其在保密通信中的 应用问题,提出了一种间歇控制策略,理论上分析了其正确性,并且给出一个定理来确定控制器的相关参数。根据提出的定理,设计出间歇控制器使得两个含有时变时滞的Chua电路 指数达到同步。将该方法应用到混沌保密通信中,在两个系统达到同步的基础上,发送端的信号能够在接收端很好地恢复出来,表明了该方法的可行性。 ?ス丶?词:间歇控制;时变时滞;指数同步;保密通信;Chua电路 ?ブ型挤掷嗪?: TP309.2 文献标志码:A Abstract: Time??varying delay widely exists in nonlinear systems. This paper investigated the intermittent control problem of nonlinear systems with time??varying delay and its applications in chaotic secure communications. The authors proposed an intermittent control scheme, and analyzed its correctness theoretically. Moreover, a theorem was also given
to determine the corresponding parameters in the controller. According to the proposed theorem, the synchronization of two chaotic Chua’s circuits can be achieved by designing intermittent controller. The method was applied to chaotic secure communications, and the sender’s signal could be recovered well at the receiving end after the synchronization was achieved. This also shows that the proposed method has some engineering applications. ??Key words: intermittent control; time??varying delay; exponential synchronization; secure communications; Chua’s circuit ?? 0 引言?? 混沌是非线性动力系统固有的一种行为,是服从某种确定规律,但同时又具有一定随机性的一种运动形式。由于混沌时间序列具有非周期性、连续宽频谱、类似噪声、高度类随机性、对初值的敏感依赖性等诸多性质,使得混沌在保密通信和扩频通信中展现出了很好的应用价值。自从1990年Pecora等人????[1]??提出了混沌同步的原理, 并在电路中得以实现以来, 各国学者们掀起了一股将混沌应用包括保密通信、扩频通信在内的信息安全领域的热潮。近年来,各
奔驰ML350 空气悬架系统常见故障 引言:一辆奔驰ML350,用户反映该车仪表板灯光系统报警,中央控制面板的悬架升高按键上的LED 灯不停闪烁。 故障1 悬架升高按键上的LED 灯不停闪烁 一辆奔驰ML350,用户反映该车仪表板灯光系统报警,中央控制面板的悬架升高按键上的LED 灯不停闪烁。 连接故障诊断仪对空气悬架系统进行检测,发现了故障含义为加注中央蓄压器的时间异常的故障码。利用故障诊断仪的驱动功能为中央蓄压器充气,发现控制单元的指令可以发出但充气泵不工作。根据驱动测试结果可以判定,既有可能是线路问题,也有可能是元件问题。先检查了充气泵的电源线,结果无电压。对照电路图进行线路检查发现,提供电源的40 A 熔丝已经熔断。但检查充气泵及线路无短路现象,于是更换熔断的熔丝试车。但进行试车后故障依旧。
中央分配阀 限压阀
充气泵 根据以上检查结果,可以确定充气泵损坏。在更换新的充气泵后悬架系统升降功能恢复,升降开关上的LED 灯在车辆悬架达到预定高度后LED 灯熄灭,故障排除。 故障2 空气悬架不能升降 一辆奔驰ML350 轿车,用户反映该车的空气悬架不能升降。 连接故障故障诊断仪对系统进行检测,发现了故障内容为充气时间异常、管路泄漏的故障码。我们先对充气泵的线路进行了检查,没有发现异常。既然线路没有问题,那么很有可能是空气悬架系统存在泄漏的问题。于是对管路及分配阀进行测漏,结果发现分配阀处有泄漏现象。那么会不会这就是故障点呢?因为一旦分配阀出现泄漏,将使得充气泵产生的高压空气从此处泄漏,这样进入空气悬架系统的高压空气量将减少,因此空气悬架在规定的时间内将无法达到设定的高度,此时按键上的LED灯便会持续闪烁。由于充气泵的工作时间超长,最终还会导致线路过载烧毁熔丝。 在更换中央分配阀后,故障排除。
悬挂运动控制系统(E题) 一、任务 设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。 在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。物体的形状不限,质量大于100克。物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。 二、要求 1、基本要求: (1)控制系统能够通过键盘或其他方式任意设定坐标点参数; (2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成; (3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;
(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。 2、发挥部分 (1)能够显示物体中画笔所在位置的坐标; (2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽 1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约 30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连 续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。 三、评分标准 四、说明 1、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合, 同时尽量缩短运动时间; 2、若在某项测试中运动超过限定的时间,该项目不得分; 3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分; 4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开 始运动后,不能再人为干预物体运动; 5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸) 测试 时自带。
XX大学 现代控制理论 ——汽车半主动悬架系统的建模与分析 姓名:XXX 学号:XXXX 专业:XXXX
一. 课题背景 汽车的振动控制是汽车设计的一个重要研究内容,涉及到汽车的平顺性和操纵稳定性。悬架系统是汽车振动系统的一个重要子系统,其振动传递特性对汽车性能有很大影响。因此设计性能良好的悬架系统以减少路面激励的振动传递,从而提高汽车的平顺性和操纵稳定性是汽车振动控制研究的重要课题。 悬架系统是汽车车身与轮胎间的弹簧和避震器组成整个支撑系统,用于支撑车身,改善乘坐舒适度。而半主动悬架是悬架弹性元件的刚度和减振器的阻尼系数之一可以根据需要进行调节控制的悬架。 目前,半主动悬架研究主要集中在调节减振器的阻尼系数方面,即将阻尼可调减振器作为执行机构,通过传感器检测到汽车行驶状况和道路条件的变化以及车身的加速度,由ECU 根据控制策略发出脉冲控制信号实现对减振器阻尼系数的有级可调和无级可调。 二. 系统建模与分析 1.1 半主动悬架系统的力学模型 以二自由度 1/4半主动悬架模型为例,并对系统作如下假设: (1) 悬挂质量与非悬挂质量均为刚体; (2) 悬架系统具有线性刚度和阻尼; (3) 悬架在工作过程中不与缓冲块碰撞; (4) 轮胎具有线性刚度,且在汽车行驶过程中始终与地面接触。 综上,我们将该系统等效为两个质量块M ,m ;两个弹簧系统Ks ,Kt ;一个可调阻尼器(包含一个常规 阻尼器Cs 和一个变化阻尼力F ),如图1所示。 图1 系统力学模型 1.2 半主动悬架系统的数学模型 由减振器的简化模型得:N S =-+F C V F 对m 进行分析:()211201122()t s s d z dz dz m K z z K z z C F dt dt dt ?? =------ ??? 即:()()1011212()t s s mz K z z K z z C z z F =------ 对M 进行分析:2212122 ()s s d z dz dz M K z z C F dt dt dt ?? =-+-+ ??? 即:()()21212s s Mz K z z C z z F =-+-+
半主动减振器工作原理及控制方式 丁问司 1.控制规则 1.1悬挂系统分类 悬挂系统从振动控制的角度来说可分为主动悬挂与被动悬挂,其中主动悬挂按其是否需要外界能量的供应可分为有源主动悬挂和无源主动悬挂。 有源主动悬挂也称全主动悬挂,通常由产生主动力或主动力矩的装置(油缸、气缸、伺服电机、电磁铁)、测量元件(加速度传感器、速度传感器、力传感器等)和反馈控制系统等几部分及一个能连续供应能量的动力源组成。 无源主动悬挂也称作半主动悬挂。由无能源输入但可进行控制的阻尼元件和弹性元件组成,其减振方式和工作原理与被动悬挂相似,不同的是悬挂参数可在一定的范围内任意调节,以获得最佳的减振效果。 半主动悬挂与全主动悬挂的区别是前者只能调节阻尼力的大小,而后者则可同时控制阻尼力的大小方向。 半主动悬挂的核心实际上是一种可调阻尼减振器,其阻尼力大小一般通过调振节流孔开度来获得,而对阻尼力的约束条件是:系统振动时联系于阻尼器的能量全部耗散掉。 1.2列车半主动控制原理 悬架系统的半主动控制原理在七十年代由美国人Karnopp提出,旨在以接近被动悬挂的造价和复杂程度来提供接近主动悬挂的性能。其基本思想是根据激励和系统的状态调节悬挂系统中的刚度和阻尼,以使某个性能指标达到最优。由于在半主动状态下改变系统的刚度非常困难,目前的研究实际上仅限于对悬挂系统阻尼的控制。 多年研究使得半主动悬架控制系统衍生了多种控制方式,其中包括:慢速控制、天棚控制、相对控制、最优控制、预测控制、自适应控制、神经网络控制等。从工程实践的情况来看目前只有天棚控制方式取得了较好的效果,并已运用到成熟的产品中。日本KYB公司与铁道总研联合研制的列车横向半主动减振器及是运用了天棚(Sky Hook)控制原理。 列车天棚原理的基本控制逻辑是被称为“天棚悬架”的数学模型,如图1所示。假设列车是沿一道虚拟的刚性墙移动,在虚拟墙与车体之间通过一虚拟减振器的作用来减小车体振动,此虚拟减振器称天棚减振器。 按照天棚原理,列车运行时理想的状况是天棚减振器始终处于工作状态以提供减振力。由于天棚减振器是虚拟的,则其应提供的减振力实际上由安装于车体与转向架间的横向减振器模拟提供。 假设车体的绝对速度X1为正(设向右为正),相对速度也为正时(车体相对转向架向右运动),虚拟的“天棚减振器”应产生一向左的力,实际中的横向减振器也产生一向左的力,此两力的方向相同,则F r = F s。 仍假设车体的绝对速度X1为正,而相对速度为负时(车体相对转向架向左
奥迪A8轿车自适应空气悬架系统 奥迪A8轿车作为奥迪品牌的顶级车型,配备了新开发的自适应空气悬架(图1)。 它利用电子减振调控装置可以实时跟踪汽车当前的行驶状态测得车轮的运动状态(非簧载质量)和车身的运动状态(簧载质量)。在四个可选模式范围内实现了不同的减振特性曲线。每个减振器都可单独进行调控。因此,在设定好的每种模式(舒适型或运动型)下均能够保证汽车具有最佳的舒适性和行车安全性。在设定的模式的框架下,车身高度自动调控程序和减振特性曲线被整合成一个系统。 系统的组成及原理 系统的组成如图2所示。 主要部件及功能 1.空气弹簧 空气弹簧采用外部引导式。它被封装在一个铝制的圆筒内。为了防止灰尘进入圆筒和(空气弹簧)伸缩囊之间,用一个密封圈密封线圈活塞和气缸之间的区域。密封圈可在维修时更换,空气弹簧伸缩囊不能单独更换。出现故障时,必须更换整个弹簧/减振支柱。 为了保证行李箱具有尽可能大的可利用空间和最大储物宽度,最大限度地减小了空气弹簧的直径。为了满足舒适性的要求,空气弹簧体积应最小。此冲突的解决方案是使用一个与减振器相连的容器存储额外的空气。 空气弹簧不仅替代了钢制弹簧,而且相对于钢制弹簧还有独特的优点。空气弹簧使用了铝制气缸的新式外部引导性装置减小了空气弹簧伸缩囊的壁厚。这样,在路面不平情况下响应更加灵敏。 2.减振器(图3和图4) 构造: 使用了一个无级电子双管气压减振器(无级减振控制系统=CDC减振器)。活塞上的主减振阀门通过弹簧机械预紧。在阀门上方安装有电磁线圈,连接导线经由活塞杆的空腔与外部连接。 功能: 减振力主要取决于阀门的通流阻力。流过的油的通流阻力越大,减振力也就越大。 以弹簧挠度(弹性)跳动(等于压力分段减振)为例从原则上说明工作原理(图5): 当电磁线圈上没有电流作用时,减振力达到最大。减振力最小时电磁线圈上的电流大约为1800mA。在紧急运行时不对电磁线圈通电。这样就设定了最大减振力,并通过其来保证车辆行驶时动态稳定。
汽车悬架控制系统发展概述 1.前言 悬架依据其可控性可以分为不可控的被动悬架和可控的智能悬架两大类。在多变环境或性能要求高且影响因素复杂的情况下,被动悬架难以满足期望的性能要求;而智能悬架能够对行驶路面、汽车的工况和载荷等状况进行监测,进而控制悬架本身特性及工作状态,使汽车的整体行驶性能达到最佳。智能悬架中主动、半主动悬架在近年来得到了迅速发展,较好地解决了安全性和舒适性这一对卜矛盾,将其缓和至相对较低。 2.主动悬架与半主动悬架 主动悬架是一个动力驱动系统,包括测量系统、反馈控制中心、能量源和执行器四个部分。其原理是测量系统通过传感器获得车辆振动信息,传递给控制中心进行处理,进而由控制中心发出指令给能量源产生控制力,再由执行器进行控制,衰减悬架的振动。由于主动悬架结构复杂,成本高,需要很大的能量消耗,它的发展受到了一定的制约,只在少数高级轿车中有所应用。与之相比,半主动悬架具有结构简单、成本较低、基本不需要消耗能量等优点,而对振动的控制效果在一定程度上却可以接近主动悬架,远远优于被动悬架,因而越来越受到业界的重视,得到了飞速发展。图1为主动悬架的原理图,其中F代表力发生器。图2为一种典型半主动悬架的结构示意图。 半主动悬架与主动悬架结构相似,只是半主动悬架用可调刚度的弹性元件或是可调阻尼的减振器代替主动悬架的力发生器。图2的半主动悬架系统中,一个连续可调的阻尼器与一个传统的普通弹簧并联,需要假定系统中的阻尼器能够完全独立于悬架的相对运动,且能根据力控制信号做出反应。 悬架控制系统的发展概况可以从控制策略、执行机构以及实际应用几个方面来分析。 3.控制策略研究 目前应用于悬架控制系统的控制理论比较多,主要有天棚控制、最优控制、预测控制、模糊控制、自适应控制、神经网络控制以及复合控制等等。 3.1 天棚阻尼与开关阴尼控制思想
§7 悬架 §主动悬架和菲主动悬架 上面讲述的传统式悬架特点是:刚度、阻尼是根据经验或优化方法确定,依此而设计的悬架结构,性能不变。不能调节——被动悬架。 主动悬架:刚度、阻尼动态自适应调节,是悬架始终处于最佳状态。 包含动力源的主动悬架系统称为全主动悬架或有源主动悬架;不包含动力源的主动悬架系统称为半主动悬架或无源主动悬架。 1.全主动悬架(简称主动悬架) 定义:主动悬架是在被动悬架系统(弹性元件、减振 器、导向装置)中附加一个可控制作用力的装置。 组成:执行机构、测量系统、反馈控制系统和能源系统4 部分组成。 执行机构的作用:是执行控制系统的指令,一般为力发生器 或转矩发生器(液压缸、气缸、伺服电动机、电磁阀等)。 测量系统的作用:是测量系统各种状态,为控制系统提供依 据,包括各种传感器。 控制系统的作用:是处理数据和发出各种控制指令,其核心 部件是电子计算机。 能源系统的作用:是为以上各部分提供能量。 (1)主动油气悬架系统 特点是通过调节油气弹簧的刚度达到主动调节目的。 (2)主动空气悬架系统 特点是通过调节空气弹簧的刚度达到调节目的。 2.半主动悬架 半主动悬架与主动悬架的区别是,半主动悬架用可控 阻尼的减振器取代了执行器。因此它不考虑改变悬架的刚 度,而只考虑改变悬架的阻尼。半主动悬架无动力源,由 可控的阻尼元件(减振器)和弹簧组成。 (1)有级式半主动悬架 将悬架系统中的阻尼分成两级、三级或更多级,可由 驾驶员选择或根据传感器信号自动进行选择所需要的阻 尼级。
(2)无级式半主动悬架 特点是可根据汽车行驶的路面条件和行驶状态,对悬架系统的阻尼在几毫秒内由最小变到最大进行无级调节。
底盘系统 5.1 电子悬架控制系统 5.1.1 系统介绍 (1)电子悬架控制系统(ESC)由以下部件组成: ●ESC模块 ●四只减震器 ●四只位置传感器 ●ALC空气压缩机模块 ●ELC继电器 带有ALC功能的ESC系统,可以在不同的路面及驾驶条件下控制减震器的硬度。ALC只用来调整车辆后部处于一个正确的水平高度。 (2)ESC模块 ESC模块接受以下信息: ●车轮与车身的相对位置 ●车速信号 ●俯/仰角度信号 通过这些信息,ESC来控制每一个减震器的软硬程度,以达到最佳的悬挂效果。ESC模块也控制车辆后部的高度,模块安装在右后座后部。 (3)位置传感器 四个位置传感器测量车轮与车身之间的相对位置,输出0-5V的输出信号。 (4)减震器
底盘系统四个减震器内各有一个执行器,分别的受ESC控制,可以在一个广泛的范围内控制减震器的软硬度。通过PWM信号可以控制流经减震器的电流大小。减震器是单管型的,ESC通过控制磁通量来磁化内部的粒子。在压缩及恢复的两个方向上,这种控制是多模式的,而且是多级的。 (5)车速信号 ESC从Class 2数据总线上获取车速信号,来控制减震器的应用模式。 1.6 俯/仰角度信号 ESC 从PCM接收到一个实际的俯/仰信号后,会控制四个减震器的减震硬度。PCM根据节气门、变速器档位、车速和刹车开关信号计算仰角信号,根据车速的变化率计算俯角信号。 1.7 警告信息 如果ESC系统出现故障,DIC会显示两种信息: ●SERVICE SUSPENSION SYS ●SPEED LIMITED TO XXX 这会在DIC上一直显示,直到故障被修复。 5.1.2 电子悬架控制系统原理 在不采用机电阀和小型移动部件的情况下,MagneRide首次在行业内推出了半活动悬架技术。半活动悬架系统的基础为MagneRide磁性液流(Magneto-Rheological)(MR)油液,该系统由充加MR油液的单管支柱、单管减震器、传感器组件及车载控制器等构成。
§7 悬架 §7.5 主动悬架和菲主动悬架 上面讲述的传统式悬架特点是:刚度、阻尼是根据经验或优化方法确定,依此而设计的悬架结构,性能不变。不能调节——被动悬架。 主动悬架:刚度、阻尼动态自适应调节,是悬架始终处于最佳状态。 包含动力源的主动悬架系统称为全主动悬架或有源主动悬架;不包含动力源的主动悬架系统称为半主动悬架或无源主动悬架。 1.全主动悬架(简称主动悬架) 定义:主动悬架是在被动悬架系统(弹性元件、减振 器、导向装置)中附加一个可控制作用力的装置。 组成:执行机构、测量系统、反馈控制系统和能源系统4 部分组成。 执行机构的作用:是执行控制系统的指令,一般为力发生器 或转矩发生器(液压缸、气缸、伺服电动机、电磁阀等)。 测量系统的作用:是测量系统各种状态,为控制系统提供依 据,包括各种传感器。 控制系统的作用:是处理数据和发出各种控制指令,其核心 部件是电子计算机。 能源系统的作用:是为以上各部分提供能量。 (1)主动油气悬架系统 特点是通过调节油气弹簧的刚度达到主动调节目的。 (2)主动空气悬架系统 特点是通过调节空气弹簧的刚度达到调节目的。 2.半主动悬架 半主动悬架与主动悬架的区别是,半主动悬架用可控 阻尼的减振器取代了执行器。因此它不考虑改变悬架的刚 度,而只考虑改变悬架的阻尼。半主动悬架无动力源,由 可控的阻尼元件(减振器)和弹簧组成。 (1)有级式半主动悬架 将悬架系统中的阻尼分成两级、三级或更多级,可由 驾驶员选择或根据传感器信号自动进行选择所需要的阻 尼级。
(2)无级式半主动悬架 特点是可根据汽车行驶的路面条件和行驶状态,对悬架系统的阻尼在几毫秒内由最小变到最大进行无级调节。
项目名称:复杂时滞系统控制基础理论与方法推荐单位:工业和信息化部 项目简介: 代表性论文专著目 录(不超过8篇):
主要完成人: 1. 姓名:夏元清 技术职称:正高级 工作单位:北京理工大学 对本项目主要学术贡献: 提出了利用多面体描述不确定性时滞系统模型以及扩维切换方法,证明了该类系统稳定和镇定的充分必要条件(属于发现点1);提出 了网络化预测补偿控制思想,给出了网络化控制系统的稳定性分析和控制器设计方法(属于发现点2);建立了复杂时滞系统马氏跳变模型及变结构控制方法; 提出了复杂时滞系统分步控制方法,满足了多性能指标要求(属于发现点3)。占本人工作量的70%。(代表性论著[1,2,5,7,8]) 曾获国家科技奖励情况:项目“多源信息环境下自主地面移动平台导航、控制及应用”获2011年度国家科技进步二等奖,排名第2;项目“多源信息复杂系统控 制基础理论与方法”获 2010年度北京市科学技术奖二等奖,排名第 1;项目“网络化控制系统分析与综合”获2012年度教育部自然科学二等奖,排名第 1。 2. 姓名:付梦印 技术职称:正高级 工作单位:北京理工大学 对本项目主要学术贡献: 系统地给出了具有时滞、异步、丢包等非完整性信息融合方法,提高了非完整信息条件下状态估计精度;给出了基于预测的网络化控 制器设计方法,保证了预测优化的收敛性和闭环系统的稳定性(属于发现点2); 提出了分步控制方法,应用在陆用武器系统网络控制中,较好地解决了这类复 杂时滞系统的控制问题(属于发现点3)。占本人工作量的60%。(代表性论著[1,6]) 曾获国家科技奖励情况:项目“多源信息环境下自主地面移动平台导航、控制及应用”获2011年度国家科技进步二等奖,排名第1;项目“多源信息复杂系统控 制基础理论与方法”获 2010年度北京市科学技术奖二等奖,排名第 2;项目“网络化控制系统分析与综合”获2012年度教育部自然科学二等奖,排名第 2。 3. 姓名:任雪梅 技术职称:正高级 工作单位:北京理工大学 对本项目主要学术贡献: 提出了带有时滞和输入输出信号滤波的复杂时滞系统辨识模型,采用具有时滞估计能力的非线性最小二乘算法实现了时滞和系统参数 的在线估计;对于具有非高斯噪声下的非结构网络化控制系统,提出了动态自学习自优化的神经网络辨识方法;将时滞引入到神经网络中,提出了复杂时滞系统 的时滞估计及非线性时滞神经网络建模辨识方法(属于发现点1)。占本人工作量的50%。(代表性论文[3,4]) 曾获国家科技奖励情况: 项目“网络化控制系统分析与综合”获2012年度教育部自然科学二等奖,排名第3。 4. 姓名:邓志红 技术职称:正高级 工作单位:北京理工大学 对本项目主要学术贡献: 提出了利用有限步长信息进行预测与补偿的数据融合方法,克服了时滞、数据丢失等因素影响,提高了估计精度;提出了基于修正卡 尔曼滤波和状态扩维方法,解决了不同网络传输通道数据包到达概率不一致时的数据融合问题,提高了网络化数据融合方法的适应性,应用在陆用武器网络控制 系统中(属于发现点2)。占本人工作量的45%。(代表性论著[6]) 曾获国家科技奖励情况:项目“多源信息环境下自主地面移动平台导航、控制及应用”获2011年度国家科技进步二等奖,排名第4;项目“多源信息复杂系统控 制基础理论与方法”获 2010年度北京市科学技术奖二等奖,排名第 4; 项目“网络化控制系统分析与综合”获2012年度教育部自然科学二等奖,排名第4。 国家科学技术奖励工作办公室
汽车悬架的半主动控制系统MATLAB/SIMULNK仿真 S0705234 沙小伟 摘要:分析当前轿车的悬架系统,对之进行简化。首先建立其1/4模型,利用仿真软件MATLAB里面的附件Simulink对悬架的简化模型进行仿真,考察其加速度,输出位移等特性。在此基础上进一步建立悬架系统的1/2模型,继续考察车身的加速度,输出位移,转角等系列特性。Simulink软件在整个的仿真过程中显示出强大的能力。 关键词:汽车悬架,半主动控制,仿真 Abstract: Analyze the suspension system of modern car, and then simplify it. First the model was analyzed with 2 degrees of freedom by the software simulink. Based on this, and then building 12 degrees of the suspension system. Inspect the acceleration and rotation angle and some other characters. In the whole process, the software simulink displayed powerful capacity. Keywords: car suspension,semi – active control, simulation 引言 汽车悬架系统简介。悬架系统是车辆的一个重要组成部分。车辆悬架性能是影响车辆行驶平顺性、操作稳定性和行驶速度的重要因素。传统的被动悬架一般由具有固定参数的弹性元件和阻尼元件组成,被设计为适应某一种路面,限制了车辆性能的进一步提高。20世纪70年代以来工业发达国家就已经开始研究基于振动主动控制的主动、半主动悬架系统。 近年来随着电子技术、测试技术、机械动力等学科的快速发展,使车辆悬架系统由传统被动隔振发展到振动主动控制。特别是信息科学中对最优控制、自适应控制、模糊控制、人工神经网络等的研究,不仅使悬架系统振动控制技术在现代控制理论指导下更加趋于完善,同时已经开始应用于车辆悬架系统的振动控制[1],使悬架系统振动控制技术得以快速发展。随着车辆结构和功能的不断改进和完善,研究车辆振动,设计新型悬架系统,将悬架的振动控制到最低水平是提高现代车辆质量的重要措施。 当代轿车的悬架系统。当代轿车悬架系统最常见的形式有:摇臂滑柱式(麦弗逊)、双A臂与多连杆式悬架系统。摇臂滑柱式悬架具有结构简单、成本低廉等优点。常见的欧洲车采用的较多。它存在的问题是:在持续颠簸的路面行驶,驾驶员容易疲劳,即车辆的操作稳定性不好,舒适性欠佳。但是由于其结构简单、易维修保养及成本低,因此在一些中低价位车上广泛地用着。 一些新型轿车上常见的多连杆式悬架系统,具有极佳的舒适性。多连杆式悬架系统的最大的优点是:其可平衡的达到其它悬架系统所达不到的性能要求,它是目前最先进的悬架系统。以日产兼具舒适性和操作稳定性智能型“QT悬架系统”为例,它具有极佳的操作稳定性转弯及直线行驶稳定性,能有效的克服路面的颠簸状况及改善制动时汽车的点头现象,可有效地降低车辆行驶的噪音[2],使车内更加宁静,全面提高的汽车的舒适性,且具备结构简单,体积更小,噪音更小的优点。此种悬架极有可能成为未来悬架系统的主流。 双A臂悬架系统是一种兼具舒适性条件和操作稳定性的组合方案。但其成本高昂,生产工艺难度大,且要求具有极高的定位精度,因此只有在赛车和高价位车上才应用。双A臂悬架再加上防倾平衡杆,能很好的适应急转弯的操作。丰田LUXUS IS 200就装用了此类悬架,再加上低高宽比轮胎、创立了驾车者十分信赖的行车稳定性。
车辆半主动悬架技术发展现状和趋势 悬架系统是汽车的重要组成部分之一。汽车悬架系统是指连接车身和车轮之间全部零部件的总称,主要由弹簧、减振器和转向机构三大部分组成,其作用是传递车轮和车架之间的一切力和力矩,并且缓和由不平路面传给车架(或车身)的冲击载荷,衰减由此引起的承载系统的振动,以保证汽车的平顺行驶。 半主动悬架是指悬架弹性元件刚度和减振器阻尼力之一或两者均可根据需要进行调节的悬架。由于半主动悬架在控制品质上接近于主动悬架,且结构简单,能量损耗小,成本低,因而具有巨大的发展潜力。 半主动悬架技术发展现状 根据悬架的阻尼和刚度是否随着行驶条件的变化而变化,可将悬架分为被动悬架、半主动悬架和主动悬架。随着生活水平的不断提高,用户对汽车舒适性的要求也越来越高,传统的汽车悬架系统已不能满足人们的要求。人们希望汽车车身的高度、悬架的刚度、减振器的阻尼大小能随汽车行驶速度以及路面状况等行驶条件的变化而自动调节,从而达到乘坐舒适性的提高。 1973年,美国加州大学戴维斯分校的D.A.Crosby和D.C.Karnopp首先提出了半主动悬架的概念。其基本原理是:用可调刚度弹簧或可调阻尼的减振器组成悬架,并根据簧载质量的加速度响应等反馈信号,按照一定的控制规律调节弹簧刚度或减振器的阻尼,以达到较好的减振效果。半主动悬架分为刚度可调和阻尼可调两大类。目前,在半主动悬架的控制研究中,以对阻尼控制的研究居多。阻尼可调半主动悬架又可分为有级可调半主动悬架和连续可调半主动悬架,有级可调半主动悬架的阻尼系数只能取几个离散的阻尼值,而连续可调半主动悬架的阻尼系数在一定的范围内可连续变化。 有级可调减振器 有级可调减振器阻尼可在2-3档之间快速切换,切换时间通常为10-20ms。有级可调减振器实际上是在减振器结构中采用较为简单的控制阀,使通流面积在最大、中等或最小之间进行有级调节。通过减振器顶部的电机控制旋转阀的旋转位置,使减振器的阻尼在“软、中、硬;三档之间变化。有级可调减振器的结构及其控制系统相对简单,但在适应汽车行驶工况和道路条件的变化方面有一定的局限性。连续可调减振器连续可调减振器的阻尼调节可采取以下两种方式: 1.节流孔径调节 早期的可调阻尼器主要是节流孔可实时调节的油液阻尼器。通过步进电机驱动减振器的阀杆,连续调节减振器节流阀的通流面积来改变阻尼,节流阀可采用电磁阀或其它形式的驱动阀来实现。这类减振器的主要问题是节流阀结构复杂,制造成本高。
汽车系统半主动减振器的仿真设计 摘要:本文阐述了卡车半主动悬架的设计与使用。半主动悬架设计的主要目的是为了减小路面影响。通过仿真和参数优化设计了半主动减振器的反馈控制规则。通过仿真试验预测的效果在实车上得到了验证。一辆是卡车试验台,一辆是半拖车拖拉机。仿真实验和实际测量值表明半主动阻尼是实现高路面适应性车辆的一个重要思路。 关键词:半主动悬架半主动阻尼卡车悬架路面破坏路面保护车辆 介绍: 电子控制的汽车悬架,尤其是主动与半主动阻尼器的研究已经开展了很长时间了。主动悬架的主要目的就是提高车辆行驶的舒适性。然而,却忽略了汽车悬架的其他工作情况指标,比如,轮胎-路面动载荷、轮胎-桥和轮胎-土壤等其他工况下的动载荷。 路面网络的维护工作对路面主管机构是一项费用很高的工作。而且,受损路面会对车辆和路面自身造成损伤。每个欧洲国家花数十亿欧元修理维护公路系统,维修费用占全部公路费用的40%~80%,约占国民生产总值的0.4%。 尽管我们尚未对路面损伤的机制有清楚的了解。但有一点我们可以证实,即路面损伤很大程度上由重型车辆交通所致,当然还有一些其他的影响因素,如路面结构、气候、环境影响等。人们研究所有这些因素对路面的影响已经多年了。车辆对路面的破坏是由轮胎与路面的作用力所致[8]。计算结果表明,一辆满载卡车对路面的破坏程度是一辆客车的10000倍。目前,国家标准只对轮胎-路面的静力作了限制。然而,最近的DIVINE和SADTS项目研究表明,轮胎-路面的动载荷部分对路面和桥梁的破坏更大。 伴随着价格低廉、功能强大的电子元件和作动器技术,人们对设计要求的提高促使了可控悬架的广泛研究。很多情况下,半主动作动器取代了全主动。半主动悬架不可能取得像全主动悬架一样的性能提高,但是,它具有实用和价格优势。 1.1 半主动阻尼: 半主动悬架因为其与主动悬架相比有很多的优点而倍受推崇,尤其是它相对于现有系统应用方便,而且能耗低。半主动系统中的一个代表就是半主动阻尼器(SAD),它可以根据一些输入信号(通常是电信号)来调节阻尼比。 半主动悬架不需要昂贵、笨重的元件,比如液压泵、储能器、液压管路和作动器等,而仅仅只需要一个可调的半主动阻尼器。这些半主动系统不能像全主动作动器一样提供相同的力规则;然而,其效果则非常接近于全主动悬架,并且能节省很大的作动能量。在许多应用中,当前的被动阻尼器很可能被半主动取代,这些可以通过可控孔口和电流变流液或磁流变流液实现。 变阻尼孔半主动阻尼器就是通过在原有被动液压阀上增加一个可变阀孔的螺旋阀,其阻尼比的变化液依赖于螺旋阀的输入电流。 研究的阻尼比连续可变的半主动阻尼器Mannesmanm Sachs CDCN 50/55。所需输入电流的变化范围为0.6A~2A。0.6A反映了最小阻尼曲线,而2A对应了最大阻尼曲线。半主动阻尼器结构拥有先进的失效安全功能:当输入电流为0时,比如外部线路断了,阻尼值自动设置为中间值。所谓的失效-安全保障特性参见图1。 由图1,很明显,半主动阻尼器有一个很有限的动作区域,最大阻尼曲线和最小阻尼曲线限定在第一和第三象限。控制单元将所需的输入力转化为可以实现的作用力,这个例在特性区域范围内并和电流值相对应。比如,实际速度所需的力大于系统可以提供的最大力,则输出力就取系统可以提供的最大力;若需要的输入力比比系统的最小输出力小,则输出最小的输出力。如果所需的力和实际速度符号相反,即需要产生能量(可以证明这种情况对半主动阻尼器是不可能的),输出力就由最小耗散能确定。
题目:浅析汽车半主动悬架及应用姓名: 专业:汽车定损与评估 班级: 指导教师: 审阅教师: 成绩: 年月日
浅析汽车半主动悬架及应用 [摘要] 汽车悬架,是保证驾乘人有一个舒适的驾驶环境和操控性,一直受到 人们的重点关注,它经过多年的发展,其结构形式也在不断完善和更新,尽管如此,传统的悬架系统仍然受到很大的限制,不能满足汽车各种工况下驾乘人的要求。为了克服传统的被动悬架对汽车性能改善的限制,近年来,汽车工业中相继出现了性能更加优越的主动悬架和半主动悬架,本文讲述的就是汽车半主动悬架系统基本特点及应用。 [关键词] 悬架半主动悬架减振器阻尼性
目录 引言 (1) 1 .半主动悬架优缺点 (2) 1.1 传统悬架与半主动悬架对比 (2) 1.2 主动悬架与半主动悬架对比 (3) 2 .半主动悬架新技术 (2) 2.1 机械控制式可调阻尼减震器 (2) 2.2 电子控制式可调阻尼减振器 (3) 2.3 电流变和磁流变液体减振器技术 (5) 结束语 (7) 致谢 (8) 参考文献 (9)
引言 汽车振动是影响汽车性能的重要因素,这种振动会严重的影响汽车的平顺性和操纵稳定性以及车辆零部件的疲劳寿命,目前国内应用比较广泛的是传统的被动悬架,被动减振器。传统的被动悬架减振器的阻尼系数和弹簧刚度是固定的,不能起到良好的减振作用。随着现代电子技术的发展,出现了主动和半主动悬架。虽然主动悬架理论上能够很好的调节阻尼系数和弹簧刚度,但是结构复杂,能耗大,成本高。而半主动悬架解决了传统悬架的舒适性与稳定性之间的矛盾,其在控制品质上接近主动悬架,但结构简单,价格相对便宜,除驱动电机和电磁阀需要消耗能量外,不需要提供额外的附加电源,它的最大优点是工作时几乎不消耗动力,因此越来越受到人们的重视。现代中高级轿车更青睐于半主动悬架这项新技术,可调阻尼减振器是半主动悬架的核心部件,它的好坏将直接影响汽车的平顺性。本课题就是对半主动悬架的一些浅显认识和它在相关汽车上的应用。
列车悬挂系统半主动及主动控制的现状 摘要:铁道车辆的高速运行增加了列车振动幅度,这不仅会损伤车辆结构,而且振动所引发的车轮动载荷变化和加速度效应,弱化了列车运行的安全性和舒适度,同时这种状态随着行车速度的提高而显著增大。因此,控制车辆振动是提高列车运行平稳性的核心技术。为了确保行车安全性和提高乘坐舒适度,一方面可以通过提高线路的质量状况;另一方面则可以通过改善车辆悬挂系统的性能。为此,设计合适的悬挂系统改善车辆的性能,对机车车辆研究具有重要意义。结合我国铁路现状,采用半主动悬挂控制系统是我国目前高速列车悬挂系统的最佳方法。而全主动悬挂系统用于控制算法研究,为半主动控制算法积累经验。本文针对半主动及主动悬挂系统作详细介绍。 关键字:主动控制;半主动控制;轨道不平顺:广义预测控制;虚拟阻尼器 1.1 列车被动悬挂分析及主动控制问题的提出 行驶中的列车受到轨道不平顺的影响、空气动力的作用、牵引力和制动力等的作用,列车将做多自由度的随机振动,从而影响列车运行的稳定性(安全性)和平稳性(舒适性)。列车悬挂系统是轮对与构架、构架与车体之间一切传递力的装置的总称,它由弹性元件和阻尼元件组成。悬挂系统对于稳定性和平稳性的影响常常是相互矛盾的,若单从提高某方面的性能来进行悬挂系统的设计,将会造成顾此失彼。传统列车悬挂系统的设计方案往往是综合线路质量、列车设计速度、载荷、强度等多方面的因素多目标约束下折衷优化的结果,不可能使列车各方面的性能都达到最佳状态。这种传统方法设计出的列车悬挂系统的弹性元件和阻尼元件,在列车行驶过程中是不变的,并且不需要外界提供能源,只是暂时储存振动能和逐渐耗散振动能量,这种悬挂方式即为被动悬挂,如图l一1所示。当列车运行载荷、速度、线路等级偏离设计条件时,列车的平稳性将发生变化,影响旅客乘坐舒适度。下面对被动悬挂车辆向轻量化、高速化发展对运行平稳性的影响进行进一步的分析。