位置度标注及测量演示版.ppt
- 格式:ppt
- 大小:893.00 KB
- 文档页数:30




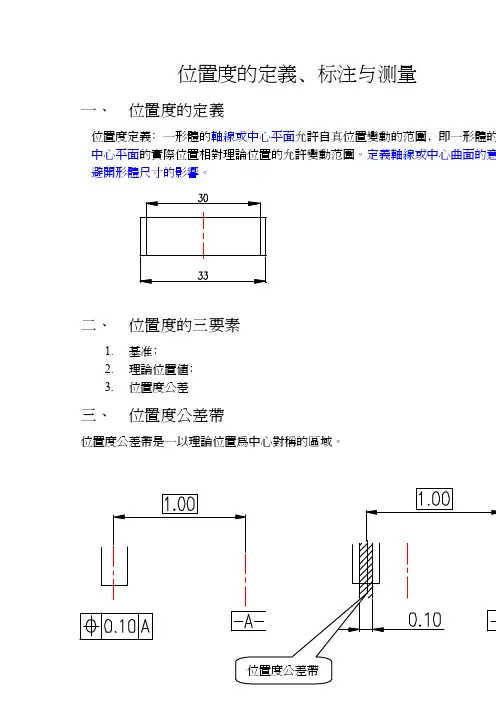
1.基准﹔2.理論位置值﹔3.位置度公差三、位置度公差帶位置度公差帶是一以理論位置為中心對稱的區域。
四、位置度的標注與測量方法3﹑以中心线左边第二根端子为例﹐测出实际尺寸D1(0.82)﹑D2(1.02)﹐根据位置定义﹐DE=abs(Da-Dt)=abs{(D1+D2)/2-Dt)}=abs[(0.85+1.00)/2-0.90}]=0.025<0.05其中﹐DE表示实际偏差abs表示绝对值Da表示实际位置尺寸Dt表示理论位置尺寸﹐对于不同的端子﹐它们的理论位置尺寸是不测量时测量者须自行计算DE=abs(Da-Dt)=abs{(D1+D2)/2-Dt)}=abs{[(d1+Dt)+(Dt-d2)]/2-Dt)}=abs[(d1-d2)/2](二)﹑IDE44P垂直位置度的标注与测量如图﹐IDE44P端子在垂直方向上具有以下特点﹕排数少(只有两排)﹐每排端多(达22PIN)﹐长度值为端子材厚值﹐对于不同的端子﹐其值差异极小﹐因此我们排端子和下排端子分别看成两个整体。
下面以下排端子为例介绍其测量方法。
一、测出角柱垂直方向上Φ1.70的实际尺寸﹐然后置中归零﹔二、往下偏移2.00﹐然后归零﹔三、为基准﹐用于控制端子锡脚与与PCB板的配合﹐现其位置度公差0.18﹔另一个是端子域的位置度﹐此位置度以KEY为基准﹐用于控制端子接触区域与对插件的配合﹐现其度公差0.3。
对于第一个位置度﹐其标注方式已统一﹔对于第二个位置度﹐有如下两种式﹕以上两种标注方式中﹐第一种直接对124根端子接触区域一一测量其位置度﹐由接触区域是包在主体内部﹐若采用这种方式﹐测量繁琐困难﹔对于第二种测量方式﹐子是下料成型﹐且插在主体插槽中﹐插槽控制了端子的平面度﹐因此只须控制KEY相POST的位置度与端子锡脚相对POST的位置度﹐相应地也就控制了端子接触区域相对水平位置度Th和垂直位置度Tv后﹐須再驗証其是否滿足公式Th²+Tv²≦0.15²。