电气工程及其自动化专业毕业论文参考题目 1.无刷双馈电机的功率因数控制 2.基于Matlab的无刷双馈电机建模与仿真 3.复合励磁同步发电机励磁控制系统 4.新型混合型有源电力滤波器的研究 5.TCR型SVC控制系统 6.某电厂卸船机供电系统滤波器设计 7.复合励磁稀土永磁同步发电机的研究 8.稀土永磁直流无刷电机设计研究 9.盘式永磁同步发电机在风力发电中的开发与应用 10.基于DSP的交流不间断电源的研究 11.基于DSP的无刷直流电机控制系统研究 12.基于DSP的异步电动机直接转矩控制系统的研究 13.平衡变压器的优化设计 14.某型号电力变压器的电磁场分析 15.基于DSP的有源电力滤波器的设计 16.基于DSP的混合电力滤波器的设计 17.低噪声电机设计 18.永磁同步电动机数字化调速系统的研究 19.并联混合型有源电力滤波器的设计 20.超高压远距离输电线路的无功补偿 21.配电网高压无功调节装置的设计与优化
22.磁阀式可控电抗器的设计 23.变频空调系统的电气设计 24.三相感应电动机调速系统的建模与仿真 25.复合励磁多相同步调速电动机的研究与设计 26.变压器型可控电抗器的设计 27.静止无功补偿器的模型与分析 28.交流异步电力测功机系统的仿真分析 29.直驱型风力发电系统中机侧变流器的设计与仿真 30.直驱型风力发系统电网侧变流器的设计与仿真 31.调磁路式可控电抗器的仿真 32.调电路式可控电抗器的设计与仿真 33.变速恒频双馈风力发电系统的设计与仿真 34.大型风力发电机组变桨控制器的一种新型直流电源系统 35.兆瓦级风力发电电伺服独立变桨控制系统的设计 36.一种新型直驱型风力发电系统电池管理装置的设计 37.无刷交流励磁机电磁计算程序研究 38.2.5MW永磁风力发电机的机械计算 39.兆瓦级风力发电机组变桨控制算法的研究 40.某幢办公楼的电气部分设计 41.某柴油机厂配电变电所电气系统设计 42.电机学实践教学改革探讨 43.太阳能光伏技术与应用
《电磁场与电磁波》仿真实验 2016年11月
《电磁场与电磁波》仿真实验介绍 《电磁场与电磁波》课程属于电子信息工程专业基础课之一,仿真实验主要目的在于使学生更加深刻的理解电磁场理论的基本数学分析过程,通过仿真环节将课程中所学习到的理论加以应用。受目前实验室设备条件的限制,目前主要利用 MATLAB 仿真软件进行,通过仿真将理论分析与实际编程仿真相结合,以理论指导实践,提高学生的分析问题、解决问题等能力以及通过有目的的选择完成实验或示教项目,使学生进一步巩固理论基本知识,建立电磁场与电磁波理论完整的概念。 本课程仿真实验包含五个内容: 一、电磁场仿真软件——Matlab的使用入门 二、单电荷的场分布 三、点电荷电场线的图像 四、线电荷产生的电位 五、有限差分法处理电磁场问题
目录 一、电磁场仿真软件——Matlab的使用入门 (4) 二、单电荷的场分布 (10) 三、点电荷电场线的图像 (1) 2 四、线电荷产生的电位 (14) 五、有限差分法处理电磁场问题 (17)
实验一电磁场仿真软件——Matlab的使用入门 一、实验目的 1. 掌握Matlab仿真的基本流程与步骤; 2. 掌握Matlab中帮助命令的使用。 二、实验原理 (一)MATLAB运算 1.算术运算 (1).基本算术运算 MATLAB的基本算术运算有:+(加)、-(减)、*(乘)、/(右除)、\(左除)、^(乘方)。 注意,运算是在矩阵意义下进行的,单个数据的算术运算只是一种特例。 (2).点运算 在MATLAB中,有一种特殊的运算,因为其运算符是在有关算术运算符前面加点,所以叫点运算。点运算符有.*、./、.\和.^。两矩阵进行点运算是指它们的对应元素进行相关运算,要求两矩阵的维参数相同。 例1:用简短命令计算并绘制在0≤x≦6范围内的sin(2x)、sinx2、sin2x。 程序:x=linspace(0,6)
调速永磁同步电动机的电磁设计与磁场分析 1 引言 与传统的电励磁电机相比,永磁同步电动机具有结构简单,运行稳定;功率 密度大;损耗小,效率高;电机形状和尺寸灵活多变等显著优点,因此在航空航 天、国防、工农业生产和日常生活等各个领域得到了越来越广泛的应用。 随着电力电子技术的迅速发展以及器件价格的不断下降,越来越多的直流电 动机调速系统被由变频电源和交流电动机组成的交流调速系统所取代,变频调速 永磁同步电动机也应运而生。变频调速永磁同步电动机可分为两类,一类是反电 动势波形和供电电流波形都是理想矩形波(实际为梯形波)的无刷直流电动机,另 一类是两种波形都是正弦波的一般意义上的永磁同步电动机。这类电机通常由变 频器频率的逐步升高来起动,在转子上可以不用设置起动绕组。 本文使用Ansoft Maxwell 软件中的RMxprt 模块进行了一种调速永磁同步电 动机的电磁设计,并对电机进行了性能和参数的计算,然后将其导入到Maxwell 2D 中建立了二维有限元仿真模型,并在此模型的基础上对电机的基本特性进行 了瞬态特性分析。 2 调速永磁同步电动机的电磁设计 2.1 额定数据和技术要求 调速永磁同步电动机的电磁设计主要包括主要尺寸和气隙长度的确定、定子 冲片设计、定子绕组的设计、永磁体的设计等。通过改变电机的各个参数来提高 永磁同步电动机的效率η、功率因数cos ?、起动转矩st T 和最大转矩max T 。本例所设计永磁同步电动机的额定数据及其性能指标如下: 额定数据 数值 额定功率 N 30kw P = 相数 =3m 额定线电压 N1=380V U 额定频率 =50Hz f 极对数 =3p 额定效率 N =0.94η 额定功率因数 N cos =0.95? 绝缘等级 B 级 计算额定数据:
武汉大学 工程电磁场及高电压综合实验
一、题目 有一极长的方形金属槽,边宽为1cm,除顶盖电位为100sinπxV外,其他三面的电位均为零,试用差分法求槽内电位的分布。 二、解题原理:均匀媒质中的有限差分法 我们在求解场的分布时,当边界形状比较复杂时,解析分析法不再适合了,我们可以采用数值计算的方法,数值计算法的基本思想,是将整体连续的场域划分为若干个细小区域,一般称之为网格或单元,如图1所示,然后用所求的网格交点(一般称为节点或离散点)的数值解,来代替整个场域的真实解。因而数值解,即是所求场域离散点的解。虽然数值解是一种近似解法,但当划分的网格或单元愈密时,离散点数目也愈多,近似解(数值解)也就愈逼近于真实值。 实解。在此处键入公式。 图1场域的剖分,网格节点及步长
(一)、场域的剖分、网格节点及步长 由边界Γ所界定的二维平行平面场(见图1),若采用直角坐标系则可令该场处在xoy 平面内。 所谓场域的剖分就是场域的离散化,即将场域剖分为若干个网格或单元。最常见最简单的剖分为正方形剖分,这种剖分就是在xy 平面上作许多分别与x 轴及y 轴平行的直线,称为网格线。网格线的交点称为节点或离散点,场域内的节点称为内节点,场域边界上的节点称为边界节点。两相邻网格线间距离称为步长,一般以h 表示。若步长相等则整个场域就被剖分为许多正方形网格,这就是正方形剖分。节点(离散点)的布局不一定采用正方形剖分,矩形剖分也常采用,正三角形剖分偶尔也被应用,不过最常见的最简单的仍然是正方形剖分。 (二)、差分与微分 从前面的分析可知,稳恒电、磁场的求解问题,归根到底是求解满足给定边界条件的偏微分方程(泊松方程或拉普拉斯方程)的解的问题所谓差分方法,就是用差商近似代替偏微商,或者说用差分代替微分,从而把偏微分方程转换为差分方程,后者实际上为代数方程。因此这种转化有利于方程的求解。 下面分别对一阶及二阶的差分公式进行推导。首先回顾有关偏导数的定义,有 00(,)(,)(,)(,) lim lim x x f f x x y f x y f x y f x x y x x x →→?+---==? (1) 因此当|x| 充分小时,可近似地用(,)(,)f x x y f x y x +- 或(,)(,) f x y f x x y x -- 代 替 f x ??,所谓差分公式,即是基于上述观点推得的。 设图1所示场域中的位函数为A ,任取一网格节点0,它在xy 平面上的坐标为(x ,i i y ),记节点0的矢量磁位为,i j A ,并把与节点0相邻的其他四个节点1、2、3、4的矢量磁位分别记为1,i j A +、,1i j A +、1,i j A -、,1i j A -,将节点0处函数A 的 一阶偏微商A x ??,用1、0两点函数值的差商1,,i j i j A A h +-近似代替,则有
微特电机课程论文超声波电动机 学院: 专业班级: 学号: 姓名: 指导教师: 日期:
摘要:超声波电机是一个机电耦合系统,涉及到振动学、摩擦学、材料学、电力电子技术、自动控制技术和实验技术等。超声波电动机利用压电材料的逆压电特性,激发电机定子的机械振动,通过定转子之间的摩擦力,将电能转换为机械能输出,驱动转子的定向运动。与传统电机相比,它具有体积小、低速大转矩、反应速度快、不受磁场影响、保持力矩大等优点,是一项跨学科的高新技术。近几年来超声波电动机已成为国内外在微型电机方面的研究热点。超声波电机(Ultrasonic Motor,简称USM)是20世纪80年代中期发展起来的一种全新概念的新型驱动装置。 超声波电机是利用压电陶瓷的逆压电效应——在交变电场作用下,陶瓷会产生伸缩的现象——直接将电能转变成机械能,这种电机的工作频率一般在20kHz以上,故称为压电超声波电机。 超声波电动机的不同命名:如振动电动机(Vibration Motor)、压电电动机(Piezoelectric Motor)、表面波电动机(Surface Wave Motor)、压电超声波电动机(Piezoelectric Ultrasonic Motor)、超声波压电驱动器/执行器(Ultrasonic piezoelectric actuator)等等。 关键字:超声波电机、逆压电效应、机械振动、高新技术。 0引言 超声波电动机的概念出现于1948年,英国的Williams和Brown申请了“压电电动机(Piezoelectric Motor)”的专利,提出了将振动能作为驱动力的设想,然而由于当时理论与技术的局限,有效的驱动装置未能得以实现。1961年,Bulova Watch Ltd.公司首次利用弹性体振动来驱动钟表齿轮,工作频率为360Hz,这种钟表走时准确,每月的误差只有一分钟,打破了那个时代的纪录,引起了轰动。前苏联学者V. V. Lavrinenko 于1964年设计了第一台压电旋转电机,此后前苏联在超声波电机研究领域一度处于世界领先水平,如设计了用于微型机器人的有2 或3 个自由度的超声波电机、人工超声肌肉及超声步进电机等。不过,由于语言等方面的原因, 前苏联的一些重要研究成果并未被西方科学界所充分了解。1969 年,英国Salfod 大学的两名教授介绍了一种伺服压电电机,这种电机采用二片式压电体结构,其速度、运动形式和方向都可以任意变化,响应速度也是传统结构电机所不能及的。美国IBM 公司的Barth 也在1973 年提出了一种超声波电动机的模型,从而使这种新型电机可以实现真正意义上的工作。 1978年,前苏联的Vasiliev成功地构造了一种能够驱动较大负载的压电超声波电动机,这种电机使用由位于两个金属块之间的压电元件所组成的超声换能器,将该换能器激起与转子接触的振动片纵向振动,通过振动片与转子间的摩擦来驱动转子转动。这种结构的优点在于不仅能降低共振频率,而且能放大振幅,遗憾的是,这种电机在运转时由于温度的升高、摩擦及磨损等原因,很难保持振动片的恒幅振动。 1982年,Sashida又提出并制造了另一台超声波电动机——行波型超声波电动机,从原来的由驻波定点、定期推动转子变换成由行波连续不断地推动转子,大大地降低了定子与转子接触面上的摩擦和磨损。这种电机能够运转的实质就是定子表面的质点形成了椭圆运动。之后,在日本掀起了利用各种振动模态的研究热潮,如利用纵向、弯曲、扭转等振动来获得椭圆运动。这种电机的研究成功,为超声波电动机走向实用阶段奠定了基础。1987年,行波超声波电动机终于达到了商业应用水平。此后许多超声波电动机新产品不断地研制出来并推向市场。
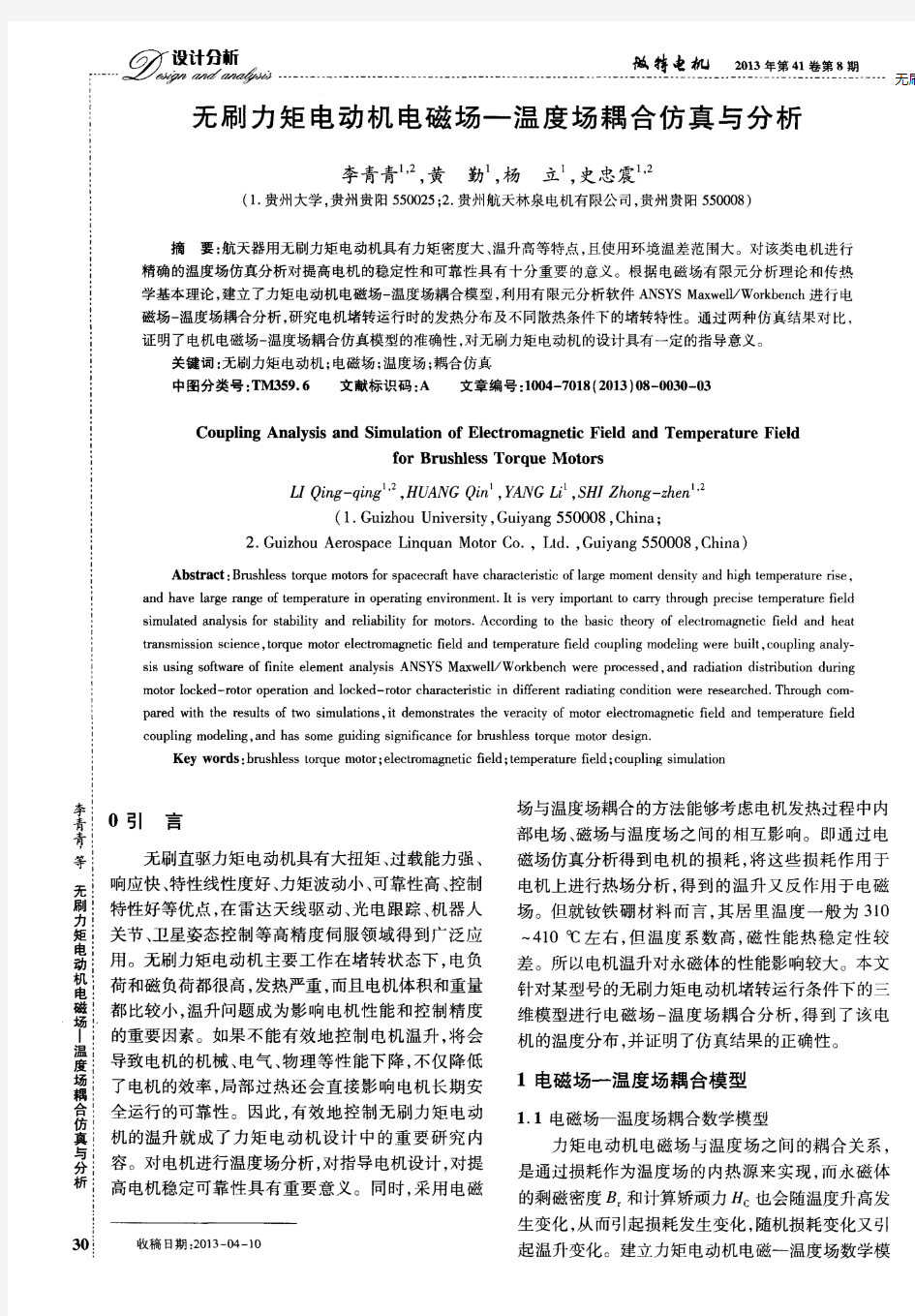
2009-06-02 18:58 by:有限元来源:广州有道有限元ANSYS软件是世界上著名的大型通用有限元分析计算软件,具有强大的求解器和后处理功能,为我们解决复杂、庞大的工程项目和致力于高水平的科研攻关提供了一个良好的工作平台,更使我们从繁琐单调的常规有限元分析计算中解脱出来。 无轴承异步电机是在普通电机的定子中再嵌入悬浮控制绕组,通过悬浮绕组磁场对原有绕组磁场的作用,改变了气隙磁场的对称分布,将在转子上产生可控磁悬浮力,实现了转子的悬浮运行。因此,讨论无轴承电机的运行机理,必须从分析电机中的电磁力着手。无轴承异步电机中转子受到了洛仑兹力和麦克斯韦力两种不同的电磁力。计算的方法通常有等效磁路法、近似解析法、位势磁通法和有限元法。在磁场分布和变化比较复杂且非线性严重的情况下,有限元法精度最高,而使用ANSYS软件既保证了有限元分析的高精度,又大大降低了计算量。本文所讨论的无轴承异步电机具有非线性饱和磁路,磁场变化复杂。因此,非常适合用ANSYS进行分析。 1 A NSYS软件简介 ANSYS软件有以下特点:使用方便、涉及面广、易学易用,高效方便的绘图功能,灵活多样的剖分网格形状,疏密程度,多种可选择的迭代求解器,强大的后处理功能。 1.1 A NSYS电磁场分析 ANSYS程序可用来分析电磁场多方面问题,如电感、电容、磁通量密度、涡流、电场分布、磁力线、力等。可有效地分析多种设备,如发电机、电动机、螺线管传动器、开关等。 ANSYS程序提供了丰富的线性和非线性材料的表达方式,包括各向同性或正交各向异性的线性磁导率,材料的B.H曲线和永磁体的退磁曲线。后处理功能允许用户显示磁力线、磁通密度和磁场强度并进行力、力矩、源输入能量、端电压和其它参数的计算。 1.2 A NSYS软件的分析计算步骤 (1)创建无轴承异步电机有限元分析模型; (2)定义和分配材料,网格剖分; (3)施加边界条件和载荷,并求解; (4)查看并保存计算结果。 2 A NSYS分析无轴承异步电机的实例 为了进一步详细i兑明ANsYs软件在无轴承异步电机电磁分析中的应用,无轴承异步电机采用48齿三相2对极结构,集中式绕组,以额定功率为120w,额定电压380V,额定转速为3000r/min的无轴承异步电机为例: 定子外半径475mm 气隙0.5mm 定子内半经260mm 定子槽数48
实验一? T形波导的内场分析 实验目的? 1、?熟悉并掌握HFSS的工作界面、操作步骤及工作流程。????? 2、?掌握T型波导功分器的设计方法、优化设计方法和工作原理。?实验仪器 1、装有windows 系统的PC 一台 2、或更高版本软件 3、截图软件 实验原理 本实验所要分析的器件是下图所示的一个带有隔片的T形波导。其中,波导的端口1是信号输入端口,端口2和端口3是信号输出端口。正对着端口1一侧的波导壁凹进去一块,相当于在此处放置一个金属隔片。通过调节隔片的位置可以调节在端口1传输到端口2,从端口1传输到端口3的信号能量大小,以及反射回端口1的信号能量大小。 T形波导 实验步骤 1、新建工程设置: 运行HFSS并新建工程:打开 HFSS 软件后,自动创建一个新工程: Project1,由主菜单选 File\Save as ,保存在指定的文件夹内,命名为Ex1_Tee;由主菜单选 Project\ Insert HFSS Design,
在工程树中选择 HFSSModel1,点右键,选择 Rename项,将设计命名为 TeeModel。 选择求解类型为模式驱动(Driven Model):由主菜单选HFSS\Solution Type ,在弹出对话窗选择Driven Model 项。 设置长度单位为in:由主菜单选 3D Modeler\Units ,在 Set Model Units 对话框中选中 in 项。。 2、创建T形波导模型: 创建长方形模型:在 Draw 菜单中,点击 Box 选项,在Command 页输入尺寸参数以及重命名;在Attribute页我们可以为长方体设置名称、材料、颜色、透明度等参数Transparent(透明度)将其设为。Material(材料)保持为Vacuum。 设置波端口源励:选中长方体平行于 yz 面、x=2 的平面;单击右键,选择 Assign Excitation\Wave port项,弹出 Wave Port界面,输入名称WavePort1;点击积分线 (Integration Line) 下的 New line ,则提示绘制端口,在绘图区该面的下边缘中部即(2,0,0)处点左键,确定端口起始点,再选上边缘中部即(2,0,处,作为端口终点。 复制长方体:展开绘图历史树的 Model\Vacuum\Tee节点,右键点击Tee项,选择 Edit\Duplicate\Around Axis,在弹出对话窗的Axis项选择Z,在Angel项输入90deg,在 Total Number 项输入2,点OK,则复制、添加一个长方体,默认名为TEE_1。重复以上步骤,在Angel项输入-90,则添加第3个长方体,默认名Tee_2.
电机控制器发展现状及研究意义 一、盘式永磁电机的发展情况及研究现状 盘式电机的气隙是平面型的,气隙磁场是轴向的,所以又被称为轴向磁场电机。法拉第发明的世界上第一台电机就是轴向磁场电机,但是由于它的定、转子之间存在轴向磁吸力以及制造复杂等缺点,使得盘式电机未能得到进一步的发展,而被以后发展起来的常规电机又称为径向磁场电机所取代,可是常规电机也并非十全十美,由于齿根部存在“瓶颈”现象,致使电机的散热、铁心利用率低等问题一直困扰着电机工程人员,而这些问题只有从结构上进行彻底的变化才能解决,于是20世纪40年代起,轴向磁场电机又重新受到了电机界的重视。实际的研究结果表明,轴向磁场电机不仅具有较高的功率密度,而且在一些特殊应用场合,它还具有明显的优越性。(吴畏,许锦兴,林金铭.盘式永磁同步电动机及其发展.电工技术杂志,1990,2:10~13.) 随着数控机床、工业机器人、机械手、计算机及其外围设备等高科技产品的兴起和特殊应用如雷达、卫星天线等跟踪系统的需要,人们对伺服驱动电机小型化、薄型化、低噪声的呼声愈来愈高,对电机的结构和体积也提出了更高的要求。世界上一些先进的工业国家从20世纪80年代初期起,就已经开始研制盘式永磁电机。由于它结合了永磁电机和盘式电机的优点,使得该类电机既具有永磁电机结构简单、运行可靠、体积小、质量轻、损耗小、效率高的优点,又同时具有盘式电机轴向尺寸短、结构紧凑、硅钢片利用率高、工艺简单、功率密度高、转动惯量小的特点,因此,该类电机在国内外迅速地得到了广泛应用。目前在不同种类、不同结构的盘式永磁电机中尤以盘式永磁直流电动机、盘式永磁同步电动机和盘式无刷直流电动机应用最为广泛。 上世纪70年代初期,盘式电机首先以直流电机的形式应用于电车、水泵、吊扇和家用电器等场合。1973年,英国的Keiper F率先指出了盘式轴向磁场结构的优越性,从而引起了电机界的极大兴趣,从70年代末期起,人们开始将盘式电机研究的方向转向盘式永磁同步电机。1978年,意大利比萨大学的Bramanti A 教授首次提出了制造轴向气隙同步电动机的几种方法,探讨论了轴向磁场同步电机的特性,并且制造论文一台双定子单隐极转子的实验样机。1979年,联邦德国布伦瑞克大学的Weh H教授给出了双转子单定子盘式永磁同步电机电磁场的计算的解析法,并导出了电机的稳态、瞬态参数和特性方程。1985年,美国弗吉尼亚理工大学的Krishnan R教授对伺服驱动用的盘式永磁同步电动机进行了全面的介绍,通过对各种径、轴向磁场电机的性能进行比较,展现了盘式永磁同步电机的优越性。(Krishnan R,Beutler A J.Performance and design of an axial field permanent magnet synchronous motor servo drive.IEEE Industry Applications Annual Meeting,1985:634~640.)2001年,Metin Aydin和Surong Hung对环形有槽和无槽盘式永磁电机进行了深入的研究并推导出了用于环形盘式永磁同步电机的方程(Aydin M,Hung S,Thomas A.Design and 3D electromagnetic field analysis of non-slotted and slotted TO-RUS type axial flux surface mounted permanent magnet disc machines.IEEE Electric Machines and Drives Conference,2001:645~651)。2004年,意大利的Federico Caricchi,Fabio Giulii Capponi等对盘式永磁电机的空载损耗和脉动转矩通过试验和磁场分析的方法进行了深入地研究。(Caricchi F,Capponi F G,Crescimbini F,et al.Experimental study on reducing cogging torque and no load power loss in axial-flux permanent magnet machines with slotted winding.IEEE Transactions on Industry Applications,2004,40(4):1066~1075.)随着市场的需要和设计研究辅助工具的提高,近几年来,国外又涌现出了许多新型的盘式永磁电机。 图1-1所示为Briggs和Stratton研制的一种新型盘式永磁直流电动机(Etek),该电机利用铜条代替了传统电机中的铜制导线,与产生相同电磁转矩的传统绕线式直流电机相比,该
工程电磁场实验报告 姓名: 学号: 联系式: 指导老师:
实验一螺线管电磁阀静磁场分析 一、实验目的 以螺线管电磁阀静磁场分析为例,练习在 MAXWELL 2D 环境下建立磁场模型,并求解分析磁场分布以及磁场力等数据。 二、主要步骤 a) 建立项目:其中包括生成项目录,生成螺线管项目,打开新项目 与运行MAXWELL 2D。 b) 生成螺线管模型:使用MAXWELL 2D 求解电磁场问题首先应该选择求解 器类型,静磁场的求解选择Magnetostatic,然后在打开的新项目中定义画图平面,建立要求尺寸的螺线管几模型,螺线管的组成包括 Core 、Bonnet 、Coil 、Plugnut、Yoke。 c) 指定材料属性:访问材料管理器,指定各个螺线管元件的材料,其中部分 元件的材料需要自己生成,根据给定的BH 曲线进行定义。 图1 元件材料 图2 B-H曲线 d) 建立边界条件和激励源:给背景指定为气球边界条件,给线圈Coil 施加电 流源。 e) 设定求解参数:本实验中除了计算磁场,还需要确定作用在螺线管铁心上 的作用力,在求解参数中要注意进行设定。
f) 设定求解选项:建立几模型并设定其材料后,进一步设定求解项,在对话 框Setup Solution Options 进入求解选项设定对话框,进行设置。 三、实验要求 建立螺线管电磁阀模型后,对其静磁场进行求解分析,观察收敛情况,画各种收敛数据关系曲线,观察统计信息;分析 Core 受的磁场力,画磁通量等势线,分析P lugnut 的材料磁饱和度,画出其B H 曲线。通过工程实例的运行,掌握软件的基本使用法。 四、实验结果 1.螺线管模型 图3 2.自适应求解 图4 收敛数据
forlink原创,转载请注明。 交直轴电感,是同步电机分析和控制所必须的重要参数。关于如何计算,只要是电磁场有限元和电机方面的论坛,都有相关的讨论。遗憾的是大都停留在泛泛层面,鲜有具体阐述。 授人以鱼,不若授人以渔。本帖拟从电感矩阵变换的角度出发,从原理上对此问题讲清楚,并给出具体操作流程。 一、基本流程 1、参考方向(reference direction)
图1 电机参考方向的定义 2、冻结磁导率(frozen permeability)对于线性材料来说,它的磁导率是一个常数,不存在冻结磁导率(frozen permeability)之说,也不存在饱和之说;但对于电机里面的铁磁材料而言,不同电流下,铁磁材料的磁导率是不同的,因此电感参数也不一样;实际计算电感时,要考虑电机额定运行工况时的饱和程度,计算出来的电感才有实际意义。这只有通过冻结磁导率的办法,才能实现。 冻结磁导率具体步骤如下: (1)、计算额定工况饱和程度。此时的激励包括额定电枢绕组电流、额定励磁绕组电流,铁磁材料为非线性磁化曲线,方程为非线性方程;
(2)、在(1)中的非线性方程迭代求解结束后,计算各个单元的磁导率,并冻结各个单元的磁导率(frozen permeability),此时磁导率为常数; (3)、去掉(1)中所加的所有激励,将电机铁磁材料的非线性磁化曲线更换为(2)中保存各个单元的磁导率,此时电机电机电感与电流无关;然后分别给每个绕组施加1A的电流,计算磁场,此时的方程为线性方程; (4)、计算(3)中能量,再依据能量法计算电感。Ansoft maxwell计算电感矩阵时,是会自动冻结磁导率和考虑饱和影响的,没必要手动冻结磁导率。当然我们也可以依照上述四步,手动冻结磁导率,然后计算电感,两种方法结果是完全一样的。 3、电流的加载(excitation)
伺服电机 “伺服”一词源于希腊语“奴隶”的意思。“伺服电机”可以理解为绝对服从控制信号指挥的电机:在控制信号发出之前,转子静止不动;当控制信号发出时,转子立即转动;当控制信号消失时,转子能即时停转。 伺服电机是自动控制装置中被用作执行元件的微特电机,其功能是将电信号转换成转轴的角位移或角速度。伺服电动机又称执行电动机,在自动控制系统中用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。 一、伺服电机的分类 伺服电机分为交流伺服和直流伺服两大类。 1、交流伺服电机 交流伺服电机的基本构造与交流感应电动机(异步电机)相似。在定子上有两个相空间位移90°电角度的励磁绕组Wf和控制绕组WcoWf,接恒定交流电压,利用施加到Wc上的交流电压或相位的变化,达到控制电机运行的目的。 交流伺服电机具有运行稳定、可控性好、响应快速、灵敏度高以及机械特性和调节特性的非线性度指标严格(要求分别小于10%~15%和小于15%~25%)等特点。 2、直流伺服电机 直流伺服电机基本构造与一般直流电动机相似。电机转速n=E/K1j=(Ua-IaRa)/K1j,式中E为电枢反电动势,K为常数,j为每极磁通,Ua、Ia为电枢电压和电枢电流,Ra为电枢电阻,改变Ua或改变φ,均可控制直流伺服电动机的转速,但一般采用控制电枢电压的方法,在永磁式直流伺服电动机中,励磁绕组被永久磁铁所取代,磁通φ恒定。直流伺服电动机具有良好的线性调节特性及快速的时间响应。 二、伺服电机的优缺点 1、直流伺服电机的优缺点 优点:速度控制精确,转矩速度特性很硬,控制原理简单,使用方便,价格便宜。 缺点:电刷换向,速度限制,附加阻力,产生磨损微粒(无尘易爆环境不宜)。 2、交流伺服电机的优缺点 优点:速度控制特性良好,在整个速度区内可实现平滑控制,几乎无振荡,90%以上的高效率,发热少,高速控制,高精确度位置控制(取决于编码器精度),额定运行区域内,可实现恒力矩,惯量低,低噪音,无电刷磨损,免维护(适用于无尘、易爆环境)。 缺点:控制较复杂,驱动器参数需要现场调整PID参数确定,需要更多的连线。
重庆大学 电磁场与电磁波课程实践报告 题目:点电荷电场模拟实验 日期:2013 年12 月7 日 N=28
《电磁场与电磁波》课程实践 点电荷电场模拟实验 1.实验背景 电磁场与电磁波课程内容理论性强,概念抽象,较难理解。在电磁场教学中,各种点电荷的电场线成平面分布,等势面通常用等势线来表示。MATLAB 是一种广泛应用于工程、科研等计算和数值分析领域的高级计算机语言,以矩阵作为数据操作的基本单位,提供十分丰富的数值计算函数、符号计算功能和强大的绘图能力。为了更好地理解电场强度的概念,更直观更形象地理解电力线和等势线的物理意义,本实验将应用MATLAB 对点电荷的电场线和等势线进行模拟实验。 2.实验目的 应用MATLAB 模拟点电荷的电场线和等势线 3.实验原理 根据电磁场理论,若电荷在空间激发的电势分布为V ,则电场强度等于电势梯度的负值,即: E V =-?r 真空中若以无穷远为电势零点,则在两个点电荷的电场中,空间的电势分布为: 1 212010244q q V V V R R πεπε=+=+ 本实验中,为便于数值计算,电势可取为 1212 q q V R R =+ 4.实验内容 应用MATLAB 计算并绘出以下电场线和等势线,其中q 1位于(-1,0,0),q 2位于(1,0,0),n 为个人在班级里的序号: (1) 电偶极子的电场线和等势线(等量异号点电荷对q 2:q 1 = 1,q 2为负电荷); (2) 两个不等量异号电荷的电场线和等势线(q 2:q 1 = 1 + n /2,q 2为负电荷); (3) 两个等量同号电荷的电场线和等势线; (4) 两个不等量同号电荷的电场线和等势线(q 2:q 1 = 1 + n /2); (5) 三个电荷,q 1、q 2为(1)中的电偶极子,q 3为位于(0,0,0)的单位正电荷。、
2007年第10期 16 永磁无刷电动机系统发展现状 莫会成 (西安微电机研究所,西安 710077) 1 引言 永磁无刷电动机系统是以电机为控制对象,以控制器为核心,以电力电子功率变换装置为执行机构的电气传动控制系统。随着电机技术、控制理论、数字脉宽调制技术、新材料技术、微电子技术及现代控制技术的进步,伺服系统经历了从步进伺服到直流伺服,进而到永磁无刷电机伺服系统的发展历程,目前已成为电机控制技术的主流方向。 2 系统组成 永磁无刷电动机系统是根据位置、速度和转矩等反馈信息构成的控制系统,由永磁无刷电动机、传感(传感器)和驱动器三部分组成(见图1)。系统有开环运行、转矩控制、速度控制和位置控制4种基本运行方式,见图2~图5。其中图4和图5是用于高 精度的控制系统,如数控机床的进给驱动等。 图 1 永磁无刷电动机系统方框图 图 2 开环运行方框图 图 3 转矩控制系统方框图 图4 速度控制系统方框图 图5 位置控制系统方框图 永磁无刷电动机是通过电子电路换相或电流控制的永磁电动机。永磁无刷电动机有正弦波驱动和方波驱动两种型式:驱动电流为矩形波的通常称为永磁无刷直流电动机,驱动电流为正弦波的通常称为永磁交流伺服电动机,按传感类型可分为有传感器电动机和无传感器电动机。 驱动器指接受控制指令、可实现对电动机的转矩、速度和转子位置控制的电气装置。 驱动器按其控制电路和软件的实现方式可分为模拟量控制、数字模拟混合控制和全数字控制三种;按驱动方式可分为方波驱动和正弦波驱动。 传感部分的作用是检测永磁无刷电动机的位置、速度和电流。常用的传感器有接近开关、光电编码器、旋转变压器、霍尔元件和电流传感器等。 3 结构、设计和工艺 3.1 电机结构 永磁无刷直流电动机的基本结构是将永磁直流电动机的定、转子位置进行互换,通常称为“内翻外”,转子为永磁结构,产生气隙磁通,定子为电枢,有多相对称绕组,直流电动机的电刷和机械换 向器被逆变器和转子位置传感器所代替。所以无刷电动机实际上是一种永磁同步电机,如图6所示。 图6 永磁无刷电动机结构
《电磁场与电磁波》课程仿真实验报告 学号 ********* 姓名 Crainax 专业光学与电子信息学院 院(系) ****** 2016 年 11月27日
1.实验目的 1)理解均匀波导中电磁波的分析方法,TEM/TE/TM 模式的传输特性; 2)了解HFSS 仿真的基本原理、操作步骤; 3)会用HFSS 对金属波导的导波特性进行仿真; 4)画出波导主模的电磁场分布; 5)理解波导中的模式、单模传输、色散与截止频率等概念。 2.实验原理 2.1导波原理 如图1,z轴与金属波导管的轴线重合。假设: 1)波导管内填充的介质是均匀、线性、各向同性的; 2)波导管内无自由电荷和传导电流; 3)波导管内的场是时谐场。 图1 矩形波导 以电场为例子,将上式代入亥姆霍兹方程?2E+k2E=0,并在直角坐标内展开,即有: ?2E+k2E=e2E ex2 + e2E ey2 + e2E ez2 +k2E =e2E ex2 + e2E ey2 ?β2E+k2E =?T2E+k c2E=0 其中{ ?T2E=e2E ex2 +e2E ey2 k c2=k2?β2 k c表示电磁波在与传播方向相垂直的平面上的波数。 如果导波沿z方向传播,则k c2=k x2+k y2 对波导中传播的电磁波进行分析可知: 1)场的横向分量可由纵向分量表示; 2)既满足亥姆霍兹方程有满足边界条件的解很多,每个解对应一个波形(或称之为模式) 3)k c是在特定边界条件下的特征值,当相移常数β=0 时,意味着波导系统不在传播,此时k c=k,k c称为截止波数。 2.2 矩形波导中传输模式的纵向传输特性
电磁场仿真实验报告
求平行输电线周围的电位和电场分布 一、报告要求:该生学号尾号为1,建立3条垂直排布的导线。电位由下到上分别为1V,2V,3V,如下图所示: 二、模型说明:静电场计算,求解区域为模型的5倍,截断边界条件。最下方导线对地高度为10米,导线半径为0.01米,导线之间间距为5米。 (即:H1=10m,H2=15m,H3=20m,U1=1V,U2=2V,U3=3V,R0=0.01m,求解区域为一半圆,题目要求求解区域为模型的5倍,模型尺寸认为是40m,故取半圆半径L=200m。) 如下图所示:
三、实验步骤: 1、确定文件名,选择研究范围。 点击Utility Menu>File>Change Title,输入你的文件名。 例如“姓名_学号”(ZLM_2012301530051) 点击Main Menu>Preferences,选择Electric。 点击Main Menu>Preprocessor>,进入前处理模块 (command: /TITLE,ZLM_2012301530051 /COM,Preferences for GUI filtering have been set to display: /COM, Electric /PREP7 ) 2、定义参数 点击Utility Menu>Parameters>Scalar Parameters,在下面“Selection”空白区 域填入参数: H1=10 H2=15 H3=20 R0=0.01 U1=1 U2=2 U3=3 每一个参数输入完毕,点击“Accept ”按钮,输入的参数就导入上方“Items”指示的框中,等参数导入完毕后,点击“close”按钮关闭对话框。(command: *SET,H1,10 *SET,H2,15 *SET,H3,20 *SET,R0,0.01 *SET,U1,1 *SET,U2,2 *SET,U3,3) 3、定义单元类型 点击Main Menu>Preprocessor>Element Type>Add/Edit/Delete,出现单元类型 对话框“Element Types”,点击Add,弹出单元类型选择库对话框“Library of ElementTpes”选择Electrostatic 和2D Quad 121(二维四边形单元plane121)。点 击ok,关闭单元类型选择库对话框,此时在单元类型对话框中显示所添加的单元类型“Type 1 PLANE121”,表示单元类型添加成功,点击Close 按钮,关闭对 话框。 (command: ET,1,PLANE121)
大学物理仿真实验报告 姓名: 学号: 班级:
实验-----利用单摆测量重力加速度 实验目的 利用单摆来测量重力加速度 实验原理 单摆的结构参考图1单摆仪,一级近似的周期公式为 由此通过测量周期摆长求重力加速度 实验仪器 单摆仪、摆幅测量标尺、钢球、游标卡尺 实验内容 一.用误差均分原理设计一单摆装置,测量重力加速度g. 设计要求: (1)根据误差均分原理,自行设计试验方案,合理选择测量仪器和方法. (2)写出详细的推导过程,试验步骤.
(3)用自制的单摆装置测量重力加速度g,测量精度要求△g/g < 1%. 可提供的器材及参数: 游标卡尺、米尺、千分尺、电子秒表、支架、细线(尼龙线)、钢球、摆幅测量标尺(提供硬白纸板自制)、天平(公用). 假设摆长l≈70.00cm;摆球直径D≈2.00cm;摆动周期T≈1.700s; 米尺精度△米≈0.05cm;卡尺精度△卡≈0.002cm;千分尺精度△千≈0.001cm;秒表精度△秒≈0.01s;根据统计分析,实验人员开或停秒表反应时间为0.1s左右,所以实验人员开,停秒表总的反应时间近似为△人≈0.2s. 二.对重力加速度g的测量结果进行误差分析和数据处理,检验实验结果是否达到设计 要求. 三.自拟实验步骤研究单摆周期与摆长,摆角,悬线的质量和弹性系数,空气阻力等因素 的关系,试分析各项误差的大小. 四.自拟试验步骤用单摆实验验证机械能守恒定律. 实验数据 摆线长+小球直径L=91.50cm
D(平均)=(1.750+1.752+1.744+1.740+1.749+1.748)÷6=1.7 47m R=D/2=0.850cm l=L-R=91.05cm t=95.91s,周期数n=50,周期T=1.92s 所以g=9.751 2ΔT/t=0.0022,ΔL/l=0.0005,所以Δg/g=0.27%,Δg=0.026 所以: g=(9.751±0.026) 实验结论与误差分析: 结论:g=(9.751±0.026),Δg/g=0.27%<1%,所以达到设计要求。 误差分析: 1.若θ>5°(即角度过大)因为T 与θ相关,当θ越大时T也越大,所以θ偏大,测量 值比值偏小。
工程电磁场实验报告 姓名:x 学号:X 班级:X 指导老师:X
实验一 矢量分析 一、实验目的 1.掌握用matlab 进行矢量运算的方法。 二、基础知识 1. 掌握几个基本的矢量运算函数:点积dot(A,B)、叉积cross(A,B)、求模运算norm(A)。等 三、实验内容 1. 通过调用函数,完成下面计算 给定三个矢量A 、B 和C 如下: 23452x y z y z x z A e e e B e e C e e =+-=-+=- 求(1)A e ;(2)||A B -; (3)A B ?; (4)AB θ (5)A 在B 上的投影 (6)A C ?; (7)()A B C ??和()C A B ??; (8)()A B C ??和()A B C ?? 2. 三角形的三个顶点位于A(6,-1,2), B(-2,3,-4), C(-3, 1,5)点,求(1)该三角形的面积;(2)与该三角形所在平面垂直的单位矢量。 (答案S=42.0119, [0.2856,0.9283,0.238]n =± ) 3. 在直角坐标系中,在点P(3,4,2)处的电场强度为423x y z E e e e =++ 。求E 在柱 坐标下的表达式。(答案423z E e e e ρφ=-+ ) 四、实验结果 A=[1,2,-3]; B=[0,-4,1]; C=[5,0,-2]; y1=A/norm(A) y2=norm(A-B) y3=dot(A,B)
y4=acos(dot(A,B)/(norm(A)*norm(B))) y5=norm(A)*cos(y4) y6=cross(A,C) y71=dot(A,cross(B,C)) y72=dot(A,cross(B,C)) y81=cross(cross(A,B),C) y82=cross(A,cross(B,C))
电磁场仿真实验报告 电气工程学院 2011级2班 2011302540056 黄涛实验题目: 有一极长的方形金属槽,边宽为1m,除顶盖电位为100sin (pi*x)V外,其它三面的电位均为零,试用差分法求槽内点位的分布。 1、有限差分法的原理 它的基本思想是将场域划分成网格,用网格节点的差分方程近似代替场域内的偏微分方程,然后解这些差分方程求出离散节点上位函数的值。 一般来说,只要划分得充分细,其结果就可达到足够的精确度。 差分网格的划分有多种不同的方式,这里将讨论二维拉普拉斯方程的正方形网格划分法。 如下图1所示,用分别平行与x,y轴的两组直线把场域D划分成许多正方行网格,网格线的交点称为节点,两相邻平行网格线间的距离h称为步距。 用表示节点处的电位值。利用二元函数泰勒公式,可将与节点(x i,y )直接相邻的节点上的电位值表示为 i
上述公式经整理可得差分方程 这就是二维拉普拉斯方程的差分格式,它将场域内任意一点的位函数值表 示为周围直接相邻的四个位函数值的平均值。这一关系式对场域内的每一节点 都成立,也就是说,对场域的每一个节点都可以列出一个上式形式的差分方程,所有节点的差分方程构成联立差分方程组。 已知的边界条件经离散化后成为边界点上已知数值。若场域的边界正 好落在网格点上,则将这些点赋予边界上的位函数值。一般情况下,场域的边 界不一定正好落在网格节点上,最简单的近似处理就是将最靠近边界点的节点 作为边界节点,并将位函数的边界值赋予这些节点。 2、差分方程的求解方法:简单迭代法 先对静电场内的节点赋予迭代初值,其上标(0)表示初始近似值。然后再按 下面的公式: 进行多次迭代(k=0,1,2,3…)。当两次邻近的迭代值差足够小时,就认为得到了电位函数的近似数值解。 实验程序:
实验一 T形波导的内场分析 实验目的 1、熟悉并掌握HFSS的工作界面、操作步骤及工作流程。 2、掌握T型波导功分器的设计方法、优化设计方法和工作原理。 实验仪器 1、装有windows 系统的PC 一台 2、或更高版本软件 3、截图软件 实验原理 本实验所要分析的器件是下图所示的一个带有隔片的T形波导。其中,波导的端口1是信号输入端口,端口2和端口3是信号输出端口。正对着端口1一侧的波导壁凹进去一块,相当于在此处放置一个金属隔片。通过调节隔片的位置可以调节在端口1传输到端口2,从端口1传输到端口3的信号能量大小,以及反射回端口1的信号能量大小。 T形波导 实验步骤 1、新建工程设置: 运行HFSS并新建工程:打开 HFSS 软件后,自动创建一个新工
程: Project1,由主菜单选 File\Save as ,保存在指定的文件夹内,命名为Ex1_Tee;由主菜单选 Project\ Insert HFSS Design,在工程树中选择 HFSSModel1,点右键,选择 Rename项,将设计命名为 TeeModel。 选择求解类型为模式驱动(Driven Model):由主菜单选HFSS\Solution Type ,在弹出对话窗选择Driven Model 项。 设置长度单位为in:由主菜单选 3D Modeler\Units ,在 Set Model Units 对话框中选中 in 项。。 2、创建T形波导模型: 创建长方形模型:在 Draw 菜单中,点击 Box 选项,在Command 页输入尺寸参数以及重命名;在Attribute页我们可以为长方体设置名称、材料、颜色、透明度等参数Transparent(透明度)将其设为。Material(材料)保持为Vacuum。 设置波端口源励:选中长方体平行于 yz 面、x=2 的平面;单击右键,选择 Assign Excitation\Wave port项,弹出 Wave Port界面,输入名称WavePort1;点击积分线 (Integration Line) 下的 New line ,则提示绘制端口,在绘图区该面的下边缘中部即(2,0,0)处点左键,确定端口起始点,再选上边缘中部即(2,0,处,作为端口终点。 复制长方体:展开绘图历史树的 Model\Vacuum\Tee节点,右键点击Tee项,选择 Edit\Duplicate\Around Axis,在弹出对话窗的Axis项选择Z,在Angel项输入90deg,在 Total Number 项输入