2014年武汉大学测绘学院考研真题
- 格式:docx
- 大小:163.14 KB
- 文档页数:18
武汉大学2004年攻读硕士学位研究生入学考试试题考试科目:测量平差 科目代码884一、填空题(共10个空格,每个空格4分)1、 已知观测向量1,3L 的协方差阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=212140206LLD 及单位权方差22= σ。
现有函数32123L L L F -+=。
则其方差=F D ( ),协因数=F Q ( ),函数F 关于观测值向量1,3L 的协方差阵=L F D ( ),协因数阵=L F Q ( )。
2、 已知观测值向量1,2L 的权阵⎥⎦⎤⎢⎣⎡--=4223LL P ,则观测值的权=1L P ( ),=2L P ( ),观测值的协因数阵LL Q =( )。
3、 条件平差的函数模型是( ),附有参数的条件平差的函数模型是( ),它们的随机模型是( )。
二、问答题(共两小题,每小题15分)1、 在图1所示测角网中,A 、B 为已知点,C 、D 、E 和F 为待定点,同精度观测了1621,...,,L L L 共16个角度。
若按条件平差法对该网进行平差;(1)(2)2、 在间接平差中,误差方程为1,,1,t t n n x B V =式中)(1,d BX L l n +-= ,观测值1,n L 的权阵为nn P ,已知参数1,1,1,t t t x X X += 的协因数阵1)(-=T XX PB B Q 误差方程得TbbT XX VV B BN B BQ Q 1-==。
以上做法是否正确为什么三、计算题(共4小题,每小题15分)1、有水准网如图2所示。
图中为A 、B 、C 为已知点,21,p p 为待定点。
已知高程为.7),(500.8H m H B A ==)(),(738.2),(241.1321m h m h m h ==。
设各水(1)、21,p p 两点高程的平差值;(2)、平差后21,p p 两点间高差的权。
2、 在图3所示的测角网中,A 、B 、C 为已知点,P 为待定点,621,...,,L L L 为同精度观测值。
1234562015-7-46问题1. 列式计算本项目中导线测量的方位角闭合差。
(4分)oDX01108 02 14DX04DX05DX05130 05 04DX03DX04DX0489 1017DX02DX03DX03112 10 24DX01DX02DX02100 32 15DX05DX01水平角观测点测站•角度闭合差计算过程如下:()""'"'"'"'"'"'1454014005405401402108040513017108924101121532100=−=−++++o o oooooo•多边形内角之和的理论值为:5401803180)2(=×=×−=∑on β789103)格网化方法及精度,或者采用的商用软件(不同格网化方法)内插精度。
1112131415162015-7-416测绘单位承担了某测区某处的控制测量工作,测区面积约,地势平坦,无CORS 网络覆盖。
工作内容包括10个GPSC 级点,GPS 联测,三等水准连测及建立测区高程异常拟合模型。
测量基准采用2000国家大地坐标系(CGCS2000)及1985国家高程基准。
测区已有资料情况:测区周边均匀分布有三个国家GPSB 级框架点,一条二等水准路线经过测区。
观测设备采用经检验合格的双频GPS 接收机(5mm +1ppm )三台套,DS1水准仪一套。
技术要求:GPSC 级网按同步环边连接式布网观测,按照三等水准连测GPSC 级点高程;采用函数()xy a y a x a y a x a a y x f 52423210+++++=,计算测区高程异常拟合模型。
经GPS 观测、水准连测及数据平差处理,获取了各GPSC 级点的CGCS2000坐标及1985高程成果。
某GPS 三边同步环各坐标分量情况统计如下:17181920距离、水平读盘和垂直度盘读数。
武汉测绘科技大学2001年硕士研究生入学考试试题考试科目:地理信息系统一、名词解释4*5=201.拓扑关系2.缓冲区分析3.不规则三角网模型4.空间内插5.数据压缩二、简答5*6=301.点、线、面三者空间关系表现形式主要有哪些?2.地图投影与地理信息系统的关系3.数据处理在地理信息系统中的作用及数据处理的主要内容4.DEM的优缺点及主要用途5.地理信息系统的组成部分及各部分的主要作用6.判断点在多边形内的基本方法三、简述7*5=351.地理信息系统中图形数据结构的主要类型及各自的特点2.地理信息系统工程的三维体系结构3.叙述四种栅格数据存储的压缩编码方法4.空间实体可抽象为哪几种基本类型?它们在矢量数据结构和栅格数据结构中分别是如何表示的?5.举例说明拓扑数据结构四、综合15*1=15地理信息系统数据源的类型有哪些?在地理信息系统中有哪些主要的数据输入方法?数据输入过程中可能产生的误差有哪些形式?引起这些误差的主要因素有哪些?武汉大学2002年攻读硕士学位研究生入学考试试题考试科目:地理信息系统原理科目代码:619注明:所有答题内容必须答在答题纸上,凡答在试题上的一律无效。
一、概念辨析题(共5小题,每小题5分,共25分)1.地理信息和地理数据的概念有何不同?2.比较数字高程模型(DEM)与真三维空间数据模型的区别。
3.比较地理信息系统(GIS)与管理信息系统(MIS)的区别与联系。
4.面条数据模型、拓扑数据模型在空间数据存储方面有何不同?各支持何种类型的空间应用?5.缓冲区查询和缓冲区分析在概念上有何不同?二、简答题(共8小题,第1小题6分,其他小题7分,共55分)1.在GIS中为何不使用地理参考坐标系统(经纬度坐标系统)而使用平面直角坐标系统存储空间数据?2.有一幅地形图,数字化后出现了仿射变形,应如何处理?写出处理过程。
3.什么是空间数据的不确定性?包含哪些类型?4.空间数据的误差可以分为哪几类?举例说明?5.四叉树是如何定义的?举例说明四叉树的分解过程。
一、填空(每空1分,共25分)1.GPS采用交会进行定位,至少需要颗卫星才能进行定位计算。
2.卫星导航定位系统的发展经历了、、三个阶段。
3.目前,GPS卫星发送两种频率的载波信号,其目的是为了。
4.GPS信号调制时,先将调制在上,然后再将组合码调制到上。
5.对于GPS卫星信号而言,电离层是介质,对流层是介质。
6.目前卫星定位系统除GPS外还有、、。
7.GPS卫星轨道的基本轨道根数有个。
8.GPS测量中常用的标准数据格式有和。
9.GPS观测值在接收机间求一次差后可消除参数,继续在卫星间求二次差后可消除参数,再在历元间求三次差后可消除参数。
10.GPS测量的误差包括与卫星有关误差,与有关误差及与有关误差。
11.消除或减弱各种误差影响的方法有:、、。
二、名词解释(每题3分,共15分)1.整周计数2.观测时段3.差分观测值4.重建载波5.相对定位三、问答(每题6分,共30分)1.在全球定位系统中,用测距码测定伪距的原因?2.重建载波的方法有哪些?3.举例说明GPS的应用。
4.说明载波相位测量的基本思想。
5.站间观测值求差可以消除或消弱定位中的哪些误差源?四、论述(每题10分,共20分)1、论述GPS单点定位解算过程。
2、比较GPS和全站仪在测量中各自的优缺点,并分析各适用于什么情况。
五、计算题(10分)某台GPS接收机在静态情况下观测到6颗卫星,如果仅采用载波相位观测方程进行定位解算,至少需要多少个历元才能进行求解,为什么?求解时的多余观测数是多少?一、填空(每空1分,共25分)1、卫星导航定位系统的发展经历了、、三个阶段。
2、全球定位系统的组成由、地面监控部分和三部分组成。
地面监控部分由、、和组成。
3、 GPS卫星信号由、和三部分组成。
4、目前,GPS卫星发送种频率的载波信号,其目的是。
5、 GPS卫星信号采用来进行信号的调制。
6、对于GPS卫星信号而言,电离层是介质,对流层是介质。
7、在仅顾及频率平方的情况下,测码伪距和载波相位观测值的电离层延迟关系为。
七、遥感图像判读名词解释:空间分辨率、光谱分辨率、红外彩色片、时间分辨率、辐射分辨率、地物波谱特征、生物量指标、地而分辨率、冃视判读、解译标志;伪彩色遥感影像、假彩色遥感影像、真彩色遥感影像、光谱响应曲线、光谱特性曲线、遥感影像的判读标志简答题:1、叙述光谱反射特性Illi线与波谱响应Illi线的区别和联系;2、举例说明为什么多光谱图像比单波段图像能判读更多倍息;3、举例说明侧视雷达图像与入射角的关系;4、叙述热红外、侧视雷达和多时域图像的特征及其判读方法;5、1=1视判读的-•般过程和方法;6、轨道间能进行立体观测的卫星对时间分辨率有何影响(举例说明);7、多波段影像与光谱响应曲线有什么关系;8、简述标准假彩色合成的过程,并指出植被、土壤、水体、重盐碱地在标准假彩色图像中的颜色,分析其原因。
9、简述可见光遥感、热红外遥感、雷达遥感的特点,并解释在可见光、热红外和雷达图像屮出现的阴影现象及其在目视解释小的应用。
10、简述侧视雷达图像的儿何特点;11、描述传感器特性的参数有哪些?12、举例说明入射角对侧视雷达图像色调的影响;13、传感器特性对判读标志的主要影响是什么?14、以美国陆地卫星TM彩像为例,分别说明遥感图像的真彩色和标准假彩色合成方案, 并说明假彩色合成方法在地物识别上有何优点:15、从几何特征、比例尺变化、分辨率和地形起伏移位等方而比较微波影像与航空像片;16、微波遥感影像的分辨率包括哪些?在目视解译中,微波遥感影像的解译标志有哪些?给出光滑水体、农作物和城市在微波遥感影像中的影像特征。
17、植物的光谱特征是什么?如何利用遥感技术区分不同的植物类型,监测植物的长势?名词解释:空间分辨率、地面分辨率:瞬时视场内所观察到的地面的大小称空间分辨力(即每个像元在地面的大小)。
空间分辨率是指遥感影像上能够识别的两个相邻地物的最小距离。
对于摄彩影像,通常用单位长度内包含可分辨的黑口“线对,数表示(线对7毫米);对于扫描影像,通常用瞬时视场角(IFOV)的大小来表示(毫弧度mrad),即像元,是扫描彫像中能够分辨的最小而积。
武汉大学2004年攻读硕士学位研究生入学考试试题科目名称:大地测量学基础科目代号:891――――――――――――――――――――――――――――――――――注意:所有的答题内容必须答在答题纸上,凡答在试题或草稿纸上的一律无效。
一、名词解释(每小题4分,共40分)1、大地水准面2、高斯投影正算3、大地高4、垂线偏差5、大地主题反算6、参考椭球定位7、照准目标的相位差8、波道曲率改正 9、静力法重力测量 10、恒星时二.填空(每小题3分,共45分)1、我国1954年北京坐标系是采用球参数。
2、已知P点的大地坐标为B=30°22´,L=114°20´,则P点位于6度投影带的号带。
3、当大地纬度B=时,子午曲率半径M等于平均曲率半径。
4、水平角观测时,必须用盘左、盘右取平均值作为最后观测值,这样可以消除和误差的影响。
5、把地面上的观测方向值(已归心改正)归算到高斯平面上,需加、、、、等改正。
6、大地测量内业计算的基准面是。
7、在水准测量时,因温度变化引起i角变化产生误差属性质的误差。
8、当椭球面上两点位于和时,两点间的相对法截弧重合。
9、当照准点的大地高H=时,δ"H =0。
10、试写出克劳莱方程。
三、计算和作图(每小题8分,共32分)1、图中P1,P2是椭球面上P1,P2在高斯平面上的投影点,试绘出:(1) P1,P2之间的大地线描写形;(2) P1,P2两点之间的方向改化;(3) P1至P2方向的平面坐标方位角;(4) P1点的平面子午线收敛角。
2、已知某一方向的大地方位角A=144°04ˊ44.77",平面子午线收敛角γ=+1°34ˊ51.58",方向改化δ=+11.14",试计算该方向的坐标方位角。
3、试作图绘出一个点的正高、正常高、大地高?并写出三者之间的关系式。
4、在二等精密水准测量往测某一奇数站,观测员按规定的顺序报出以下读数(N3水准仪)2406、1986、21983、16006、1809、1391、52138、46163。
2014年复试笔试真题1、分析遥感专题制图优势与关键技术(50)有两本书,叫遥感制图,专题地图制图(就是你参加的那个gis开发做的那类图),现在就是用遥感的方法来制作专题地图,你需要查一下这两本书所涉及的技术。
优势:遥感制图是指通过对遥感图像目视判断或利用图像处理系统对各种遥感信息进行增强与几何纠正并加以识别,分类和制图的过程,遥感图像有航空遥感图像和卫星遥感图像,制图方式有计算机制图和常规制图,目前最多及着重研究的是利用Landsat的MSS图像制图,由于多波段的卫星具有信息量丰富,现势性强,利用它编图周期短等优点,得到了广泛的应用。
传统制图过程中,主要通过调绘,权威部门发布的地理信息,从现有出版物中转绘,GPS跟踪等方法获取地理信息。
可以看出他周期长,无论从外业调绘或GPS跟踪,周期都很长,其次资金花费较大且时间滞后。
相比较制图,遥感制图具有以下特点:1.由于它以丰富的影像细节去表现区域的地理地貌,比单纯使用线划,符号的线划地图信息量丰富,而且生动形象富有表现力。
2.由于它是以简单的线划符号和标志表示形象,无法表示或计量的地物。
弥补了单纯用形象表现地图的不足。
3.遥感地图减少了传统制图的工作量,缩短了地理制图的周期财政性强。
4.遥感图像能快速获取大范围地理信息,成图范围大。
关键技术:1.数据准备(1)地形图地形图是进行遥感影像几何精纠正的坐标参照系,也是重要的基础数据, 包含多种层面的非遥感信息数据.目前常用的地形数据多为数字地图。
对于尚未有数据地图的工作区域,通常收集纸质地图,经过数据扫描,转换为数据地图。
扫描分辨率通常设置为200-400dpi。
扫描图通常存在变形,需要利用GIS软件进行几何校正,已达到制图精度要求。
对于早期或常规方法获得的成果图件,在建立数据库及系统分析前,通常也采用图形扫面方法,经系统处理,将纸质图形转换为数字图形.(2)遥感数据源的选择遥感数据源的选择是整个遥感制图工作中最基本和重要的工作。
《大地测量学基础》习题与思考题一 绪论1.试述您对大地测量学的理解?2.大地测量的定义、作用与基本内容是什么?3.简述大地测量学的发展概况?大地测量学各发展阶段的主要特点有哪些?4.简述全球定位系统(GPS )、激光测卫(SLR )、 甚长基线干涉测量(VIBL )、 惯性测量系统(INS )的基本概念? 二 坐标系统与时间系统1.简述是开普勒三大行星定律? 2.什么是岁差与章动?什么是极移? 3.什么是国际协议原点 CIO?4.时间的计量包含哪两大元素?作为计量时间的方法应该具备什么条件? 5.恒星时、 世界时、 历书时与协调时是如何定义的?其关系如何? 6.什么是大地测量基准?7.什么是天球?天轴、天极、天球赤道、天球赤道面与天球子午面是如何定义的 ? 8.什么是时圈 、黄道与春分点?什么是天球坐标系的基准点与基准面? 9.如何理解大地测量坐标参考框架?10.什么是椭球的定位与定向?椭球的定向一般应该满足那些条件? 11.什么是参考椭球?什么是总地球椭球?12.什么是惯性坐标系?什么协议天球坐标系 、瞬时平天球坐标系、 瞬时真天球坐标系?13.试写出协议天球坐标系与瞬时平天球坐标系之间,瞬时平天球坐标系与瞬时真天球坐标系的转换数学关系式。
14.什么是地固坐标系、地心地固坐标系与参心地固坐标系?15.什么协议地球坐标系与瞬时地球坐标系?如何表达两者之间的关系?16.如何建立协议地球坐标系与协议天球坐标系之间的转换关系,写出其详细的数学关系式。
17.简述一点定与多点定位的基本原理。
18.什么是大地原点?大地起算数据是如何描述的?19.简述1954年北京坐标系、1980年国家大地坐标系、 新北京54坐标系的特点以及它们之间存在相互关系。
20.什么是国际地球自传服务(IERS )、国际地球参考系统(ITRS) 、国际地球参考框架(ITRF)? ITRS 的建立包含了那些大地测量技术,请加以简要说明?21. 站心坐标系如何定义的?试导出站心坐标系与地心坐标系之间的关系?22.试写出不同平面直角坐标换算、不同空间直角坐标换算的关系式?试写出上述两种坐标转换的误差方程式? 23.什么是广义大地坐标微分方程(或广义椭球变换微分方程)?该式有何作用? 三 地球重力场及地球形状的基本理论1.简述地球大气中平流层、对流层与电离层的概念。
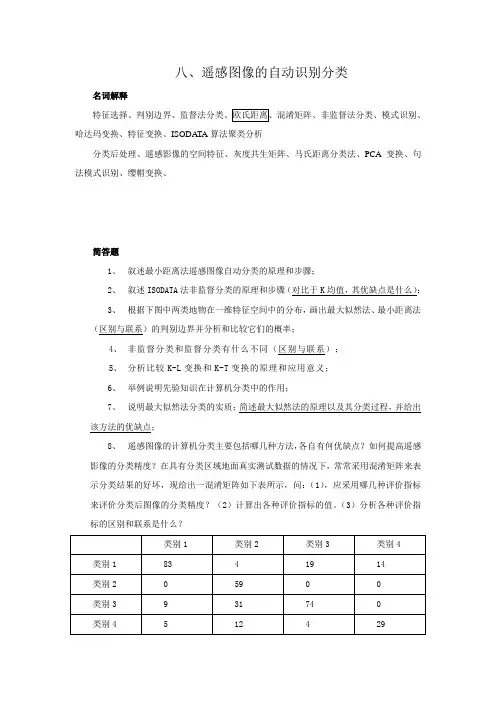
八、遥感图像的自动识别分类名词解释哈达玛变换、特征变换、ISODA TA算法聚类分析分类后处理、遥感影像的空间特征、灰度共生矩阵、马氏距离分类法、PCA变换、句法模式识别、缨帽变换、简答题1、叙述最小距离法遥感图像自动分类的原理和步骤;2、叙述ISODATA法非监督分类的原理和步骤(对比于K均值,其优缺点是什么);3、根据下图中两类地物在一维特征空间中的分布,画出最大似然法、最小距离法(区别与联系)的判别边界并分析和比较它们的概率;4、非监督分类和监督分类有什么不同(区别与联系);5、分析比较K-L变换和K-T变换的原理和应用意义;6、举例说明先验知识在计算机分类中的作用;7、说明最大似然法分类的实质;简述最大似然法的原理以及其分类过程,并给出该方法的优缺点;8、遥感图像的计算机分类主要包括哪几种方法,各自有何优缺点?如何提高遥感影像的分类精度?在具有分类区域地面真实测试数据的情况下,常常采用混淆矩阵来表示分类结果的好坏,现给出一混淆矩阵如下表所示,问:(1),应采用哪几种评价指标来评价分类后图像的分类精度?(2)计算出各种评价指标的值。
(3)分析各种评价指标的区别和联系是什么?9、根据你学的知识,论述提高遥感影像计算机自动分类精度的对策(要求从数据源和分类方法两方面分别说明;10、监督法分类的优缺点;11、遥感影像对整体类别分类精度评价时常用的评价指标有哪两个?什么情况下两者的计算值将差别很大?12、如何利用知识改进遥感图像的自动识别效果?13、论述遥感图像的空间特征及其应用;14、根据你学的知识,论述提高遥感影像计算机自动分类精度的对策(要求从数据源和分类方法两方面分别说明);15、以最大似然分类为例,简述遥感图像自动分类的步骤,并提出你认为提高分类精度的策略;特征选择:用最少的影像数据最好地进行分类。
这样就需在这些特征影像中,选择一组最佳的特征影像进行分类,这就称为特征选择;判别边界:如果要判别某一个特征矢量属于哪一类,只要在类别之间画上一些合适的边界,将特征空间分割成不同的判别区域,这些边界就是判别边界;监督法分类:监督法分类意味着对类别已有一定的先验知识,利用“训练样区”的数据去“训练”判决函数就建立了每个类别的分类器,然后按照分类器对未知区域进行分类。
武汉大学
2008年攻读硕士学位研究生入学考试试题
科目名称:摄影测量学(A卷) 科目代码:936
一、 简答题(共5小题,每小题12分,共60分)
1.(12分)请作图示分别表示航空摄影相片的内方位元素和外方位元
素并加以必要的符号和文字说明。
2.(12分)航空摄影测量解析计算中对于像点坐标的系统误差改正,
在世纪作业过程中通常很少顾及因大气折光和地球曲率引起的像点坐标系统误差改正,请说明为什么?
3.(12分)请比较说明摄影测量三个历史发展阶段的各自特点?
4.(12分)请详细解释POS辅助空中三角测量的含义,同时说明由
POS得到的观测数据参与光束法平差的必要性?
5.(12分)请解释需安全迭代法出差探测的基本含义,权函数的选择
应满足哪些条件?
二、 综合问答题(共6小题,每题15分,共90分)
1.(15分)请解释共面条件的含义并给出共面条件的基本式,同时
说明共面条件在摄影测量中的主要应用。
2.(15分)传统光束法区域网空中三角测量的基本思想是什么?请
用流程图表示传统光束法区域网空中三角测量的主要内容和计算步骤。
武汶吴尊——1〕014年攻读硕士学位研究生入学考试试题'(满分值150分)i 二.名词解释(共6小题,每小题5分,共30分) 1. AS 2.GNSS3・整周跳变 4. 观测时段5. 基线向就固定解6.RTK三. 判断题,正确打J ,错误打X (共10小题,每小题2分,共20分)1采用互相关技术的GPS 接收机,可获取L1和L2上的P 码伪距观训值。
()2. 在GPS 导航定位中,通常认为GPS LI 、L2信号在电离层中的传播速度各•不相同。
()i3. 若均以m 为单位•则L1上的P 码伪距观测值与L1载波相位观测值的对渍〜、目却匕?[空基咼(大地测量学与测环工程方向)(B 卷)科目代生竺• 注意:所有答题内容必须写在答题纸上,凡写在试题或草稿纸上的-律无效・Ir 填空题(共10空,每空1分,共io 分)i英国曽在GPS 系统中所实厠的SA 技术包括两项内%-项为卫L 技术'丨该技术是J2L :另i 项为&L 技术.该技术是亠<L ・ 。
ggIGS 所提供的主要产品有⑸、地球白转参数(极移和日常变化)-IGS " 矇站的坐・工心 .各跟;:尺顶方•对流层延迟和业。
一呛. 在相距约5000m 的两个测站上,使用两台单频接衣机进行了 50个加兀労雪 态同步观测.观测中始终保持了对6颗1】星的繆豫未失昵 若雄线解舁£ 用双差载波相位观测模型,则整周模糊度参数有业个:接收机钟星参数 有⑻个。
衡屋GPS 网的质虽,要从d 卫L 和成果适用性等方而进行•1. 2.3.4.层延迟相同. _______________共4贡第[页环2->3 ->6->2:・0・003m:坏3T4T6—3: 0.005m:环4T5->6->4: -0.052m:环5->1 ->6->5: -0.003m G宦过程中求得的V r pv = 0.060m2.A. 59 条B. 159 条C.25。
条D.600 条斤祚同一时刻,某卫星的L1与L2我波相位观测值中分别发生+1周\ 1IX. r J 汪"爪九,则窄卷规测值1的周叛数償r哎・f \ m ■/b,•A. 0B.-1C. 1D.2主相对定位的数鬼、Xfi中7政机何求堆一定可U消除的误筈彩呦是F fl ^4t 4ScA・上生円甩B GD.对流层延迟約2所示). 检验了如下5个独立环,各环全长闭冬J楚GPS网中(如?(坏分卮闭合差的平方和开方)分别为:6.:h A.O.OlOm,則参与平羌的独立基线数眾为坏j —2—>6—> 1:0.002m:若耍求环全长闭台差应小亍0・01m,则虽仃町能存住质鱼何跣的星线为;-j1・< 10分)什么是多路径误差•消除和削刖多路衿火差的方法和措施有忧址?2・(10分〉什么是差分GPS,为何其能撮高导航定位的精度?T ・(10分)GPS 甚统解样结果的质昴受挪些因索的形刪・数据处理过程中处 何应对这些因素的影响?F (15分)什么是OPS 网的无约束平差和约束平雄?它们各自的目的分别是、 |!什么?如何评估上述网平差结果的质虽?5. (15分)有LI. L2两神栽波相位观测值的荣种线性组合观测值伟< 为:|仇C=Z J %-£2%苴中,%、化2分别为L1利L2萩波相位戎测饥 单位为周(cycle ).几、分别为L1和L2裁波的频廉.设LI LC/A 码伪別观测值的电离层延G ;为妙“(单位:m )o 请给出这种組合现測值的电离层延迟的教駅(以m 勺 单位)"(注:要求有必要的论证过稈)V 说明通过tips 确定大气中水丸含jt 的基夺尿蝦119鱼2 _____________________共4页 第4页|9・10. 五・ A ・ 16B. 4T 6S 4D ・条件不足,无法确定在GPS 接收机检验的顶IJ 中.石基线输验的目的是. A.测试樓枚机内靛嗅值水平C.评价接牧机荻标馆定性 采J 、£精密星历进行基线解算, A. WGS-84 C. 1980年西安坐标系B別试桧妆株天统相垃中心的住 定度 D.测试接收机离低温性能 则所扫基线向虽所屈的坐标系为()B 1954年北京坐标泵D ・ ITRF问答及论述题(共70分)一、填空(每空1分,共25分)1. GPS采用交会进行定位,至少需要颗卫星才能进行定位计算。
2. 卫星导航定位系统的发展经历了____________ 、、三个阶段。
3. 目前,GPS卫星发送两种频率的载波信号,其目的是为了4. GPS信号调制时,先将调制在上,然后再将组合码调制到上。
5. 对于GPS卫星信号而言,电离层是介质,对流层是介质。
6. 目前卫星定位系统除GPS外还有、、。
7. GPS卫星轨道的基本轨道根数有个。
8. GPS测量中常用的标准数据格式有和。
9. GPS观测值在接收机间求一次差后可消除参数,继续在卫星间求二次差后可消除参数,再在历元间求三次差后可消除参数。
10. GPS测量的误差包括与卫星有关误差,与有关误差及与有关误差。
11. 消除或减弱各种误差影响的方法有:、、。
二、名词解释(每题3分,共15分)1. 整周计数2. 观测时段3. 差分观测值4. 重建载波5. 相对定位三、问答(每题6分,共30分)1. 在全球定位系统中,用测距码测定伪距的原因?2. 重建载波的方法有哪些?3. 举例说明GPS的应用。
4. 说明载波相位测量的基本思想。
5. 站间观测值求差可以消除或消弱定位中的哪些误差源?四、论述(每题10分,共20分)1、论述GPS单点定位解算过程。
2、比较GPS和全站仪在测量中各自的优缺点,并分析各适用于什么情况。
五、计算题(10分)某台GPS接收机在静态情况下观测到6颗卫星,如果仅采用载波相位观测方程进行定位解算,至少需要多少个历元才能进行求解,为什么?求解时的多余观测数是多少?一、填空(每空1分,共25分)1、卫星导航定位系统的发展经历了、、三个阶段。
2、全球定位系统的组成由、地面监控部分和三部分组成。
地面监控部分由、、和组成。
3、GPS卫星信号由、和三部分组成。
4、目前,GPS卫星发送种频率的载波信号,其目的是。
5、GPS卫星信号采用来进行信号的调制。
&对于GPS卫星信号而言,电离层是__________ 介质,对流层是___________ 介质。
7、在仅顾及频率平方的情况下,测码伪距和载波相位观测值的电离层延迟关系为。
& 卫星轨道的基本轨道根数有_______ 个。
9、 GPS 测量中常用的数据格式有 格式和 格式。
10、 在如下图所示文件中,有 种观测值,历元采样间隔是 ,第二个历元观测到 颗卫星,第二个历元中第4颗卫星的L1观测值是二、 名词解释(每题3分,共15分) 1、 整周跳变 2、 重建载波 3、 观测时段 4、 多路径误差 5、 单点定位三、 问答(每题6分,共30分) 1、 在全球定位系统中,用测距码测定伪距的原因? 2、 如何用双频观测值来消除电离层延迟?试用双频伪距观测值进行说明。
3、 重建载波的方法有哪些? 4、 子午卫星系统有哪些局限性? 5、 载波相位观测值组合的标准是什么? 四、 论述(每题10分,共20分) 1、 在全球定位系统中有哪些误差源,如何消除,并简要说明消除方法适用的情 况。
2、 试说明利用测距码进行距离测量的基本原理。
五、 计算(10分)某GPS 网有30个点组成,现准备用5台接收机来进行观测,每站设站次数不少 于2次。
试计算全网的观测时段数 C,全网的基线向量数J 总,其中的独立基线 向量数J 独,多余基线£.10DATS RIN V 3・LU 001 khcumiagan22C252?9Q OESIZkVATIOtl t'ITADhouirkin^an xlsnhu^ce TP1HBLE E7O0 TMi^L2«_OaC (GP 切05APR09 Z7S&Z3?a -46LS3S.2DCI5hkf Above antenna h«3 3 tuoift wack: to BOTTOM OF JCN7ENNXMores The abov# oEfae^s e COPRBCTEI>,Rav OEfsets; H-D ・aoooE- □.OOCD M-0・DOOD1 L 04 LI Ci LZ Pi鼻0・0002 0063 27 12 19.0000000 200S 8 27 e34si.aoooooo0«3 271」 19.OOOOOOD o i19P1MEX VEPS tOf] / TYPE PGH / RUN BT / DATE OeSE^VCR / AcJEtiCY PEC #/ T ^PZ / vrii$ AMT # / TYPEMARKED NAME HkfiKEJi NUHEEt APPR02 POS ITTCf ; XY2 ANT£NHA: PELTA K/E/N ■-'OKHfNT COJIfl ENT GOBBOTT COKHENTUKVELENGTH : FACT Ll/2 flf / TYPES OT 0B5ERV INTERVALTIKB Cr FIRST OB3 TIME Or LKS1 OBSRCV C1OCK GfFS JlPPL ENI* OF HEJLDZF^8?Q.®0213 2 S12417fi . €0^03 -55£7^.Z$2 15 25DKS12 .42205 Q€ 9 27 1 2 ^9.0000090 0 9-59 l*?0.d?015 -39711.12916 17-11950^4C1784850. sten50310,;70CS1&0:07.&QS1«10519.8091824255412 ・23405 2 3 6riS727.55SD6£ 11^8447H 580071 .0000725124642,35£03205058^7.S390B2$014387,9380*-22 51241.7^.777* A-t..< L .r. Z :D^;i ;l : .5 9 14 14 19-35751,33856 -?569S,U^9^7 773SB.74^53-i245&Me&53 53929.9665B30337,LOZ-flSL01363.?5Q572552.15€S9-钳12 ■糾钳E21 £2 2-1 2 S 5409*38^^=5 Z36«g7^6.386^7 212-7^72-? , 55948 25124638.7544( 235«260^+«^5^7205O5B12,3d3«92501438A.71S4*^79ZD51.15704172^83,B1C4Q.DOOO 0.0000向量数J余。