飞轮的转动惯量确定后,就可以确定其各部分的尺寸了。需要注意的是,
在上述讨论飞轮转动惯量的求法时,假定飞轮安装在机械的等效构件上。实际
设计时,若希望将飞轮安装在其它构件上,则在确定其各部分尺寸时需要先将
计算所得的飞轮转动惯量折算到其安装的构件上。飞轮按构造大体可分为轮形
和盘形两种。
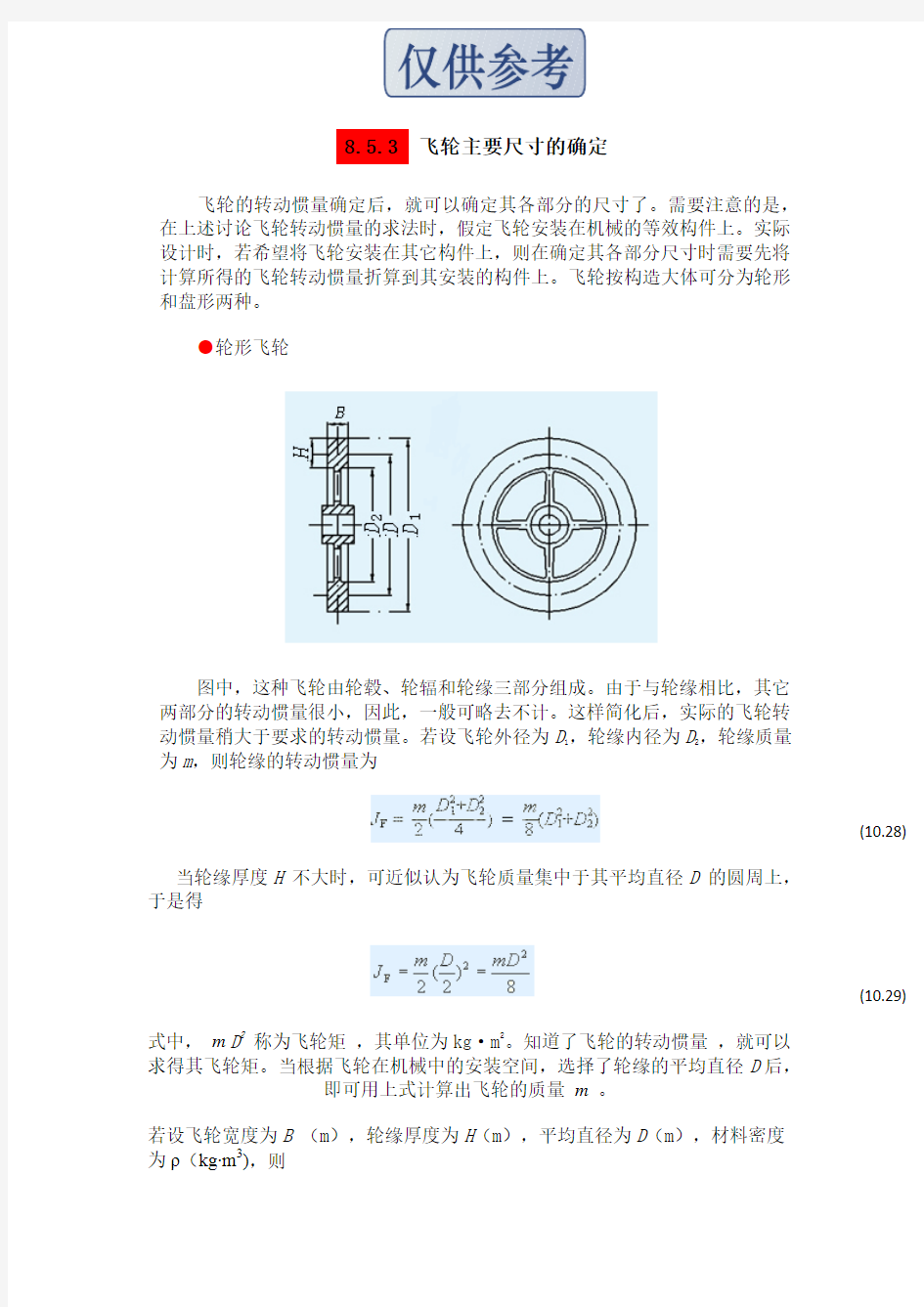
●轮形飞轮
图中,这种飞轮由轮毂、轮辐和轮缘三部分组成。由于与轮缘相比,其它
两部分的转动惯量很小,因此,一般可略去不计。这样简化后,实际的飞轮转
动惯量稍大于要求的转动惯量。若设飞轮外径为D1,轮缘内径为D2,轮缘质量
为m,则轮缘的转动惯量为
(10.28)
当轮缘厚度H 不大时,可近似认为飞轮质量集中于其平均直径D 的圆周上,
于是得
(10.29)
式中, m D2称为飞轮矩 ,其单位为kg·m2。知道了飞轮的转动惯量 ,就可以
求得其飞轮矩。当根据飞轮在机械中的安装空间,选择了轮缘的平均直径D后,
即可用上式计算出飞轮的质量 m。
若设飞轮宽度为B (m),轮缘厚度为H(m),平均直径为D(m),材料密度
为ρ(kg·m3),则
(10.30)
在选定了D并由式(10.28)计算出m后,便可根据飞轮的材料和选定的比值H/B
由式(10.30)求出飞轮的剖面尺寸H和B,对于较小的飞轮,通常取H/B≈2,
对于较大的飞轮,通常取H/B≈1.5。
由式(10.29)可知,当飞轮转动惯量一定时,选择的飞轮直径愈大,则质量
愈小。但直径太大,会增加制造和运输困难,占据空间大。同时轮缘的圆周速度
增加,会使飞轮有受过大离心力作用而破裂的危险。因此,在确定飞轮尺寸时应
核验飞轮的最大圆周速度,使其小于安全极限值。
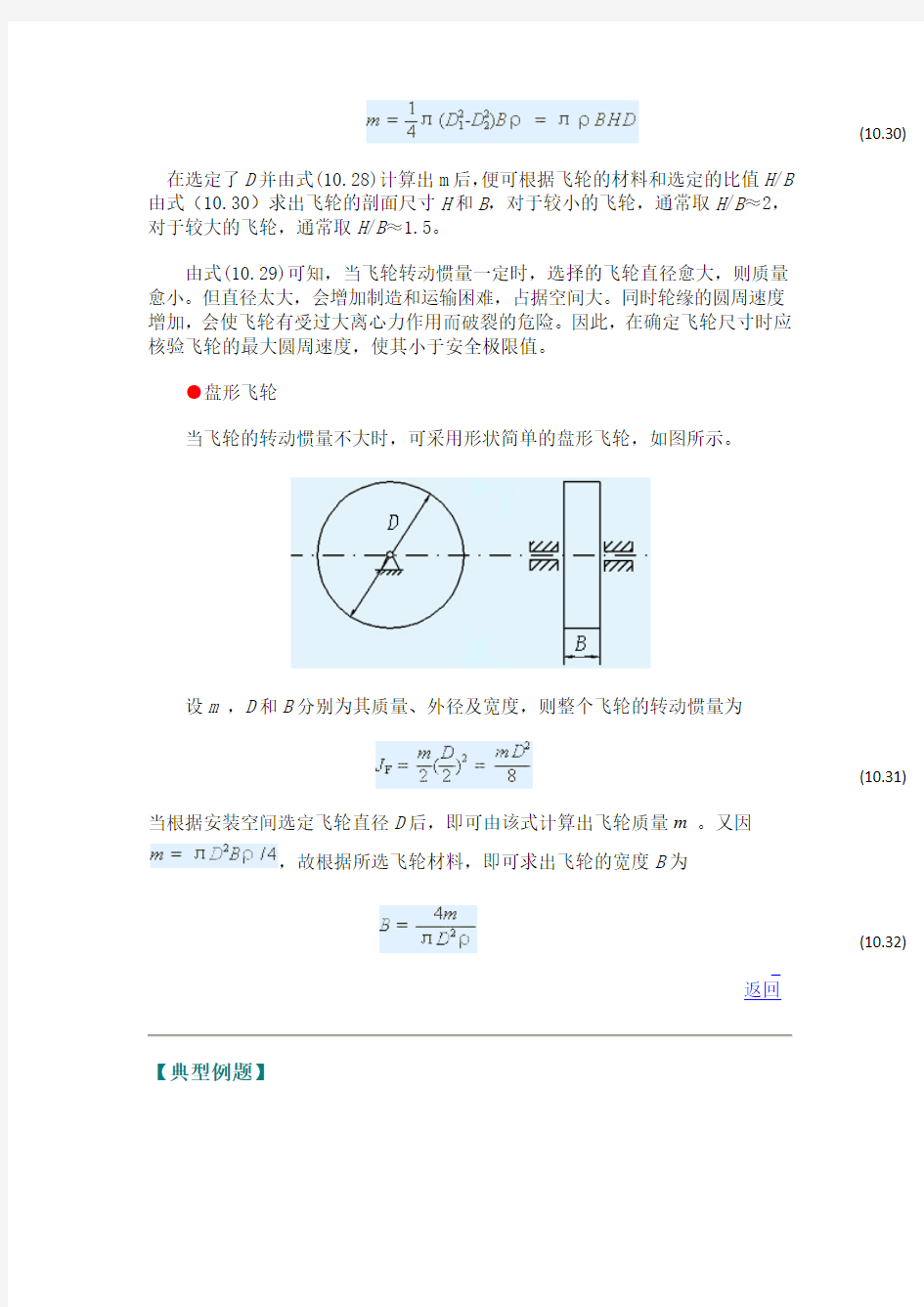
●盘形飞轮
当飞轮的转动惯量不大时,可采用形状简单的盘形飞轮,如图所示。
设m ,D和B分别为其质量、外径及宽度,则整个飞轮的转动惯量为
(10.31)
当根据安装空间选定飞轮直径D后,即可由该式计算出飞轮质量m 。又因
,故根据所选飞轮材料,即可求出飞轮的宽度B为
(10.32)
返回
【典型例题】
旋转物体的转动惯量J与飞轮矩GD2都是表是质量元素及其相对于转轴的关系,两者概念相似,但表达的内容不同,在平时的计算和交流中常常容易混淆。下面通过公式就能很清楚的看出两者的区别。
转动惯量=M×ρ2,其单位是kgm2
飞轮力矩=G×D2,其单位是Nm2
其中,G代表旋转物体的质量;
ρ表示基于转轴的旋转半径;
D表示基于转轴的旋转,直径D=2ρ。
因此GD2=4g×J
在电机起动计算中,转动惯量直接影响起动时间的计算,一旦出错,会使计算结果相去甚远,甚至是作出相反的结论。对此,我们在工程计算时一定要保持高度的敏感性。
例5 在一台用电动机
作原动机的剪床机械系
统中,电动机的转速为
n m=1500 r/min 。已知折
算得电机轴上的等效阻
力矩 M r 的曲线如图
( a )所示,电动机的
驱动力矩为常数;机械系
统本身各构件的转动惯
量均忽略不计。当要求该
系统的速度不均匀系数
为 δ≤ 0.05 时,求安装在
电机轴上的飞轮所需的
转动惯量 J F 。
解 取电动机轴为等效构件
(1)求等效驱动力矩 M
d
图中只给出了等效力矩M
r
的变化曲线,并知道电动机的驱动力矩为常数,
但不知其具体数值。根据一个周期内等效驱动力矩 M
d
所做功等于等效阻力矩 M d 所消耗功的原则可得
求最大盈亏功[W]
在图中画出等效驱动力矩 M d =462.5 N ? m 的直线,它与 M r 曲线之间所夹的各单元面积所对应的盈功或亏功分别为
J
=-1256.3 J
+(4625-200)×π=844 J
根据上述结果绘出能量指示图(b ),可见,最大盈亏功即为 f
2 或 f
1
+f
2
。
即
[W]=1256.3 J
(2)求飞轮的转动惯量
(3)将[W] 代入飞轮转动惯量计算式,可得
kg·m2
由此例可知,不论已知M
d 的规律或 M
r
的规律,总可以运用在一个周期内
等效驱动力矩所做的功应等于等效阻力矩所消耗的功(输入功等于输出功)的原则,求出未知的一个常数力矩,然后 求出最大盈亏功[W] 。
水轮发电机的飞轮力矩和机组的惯性时间常数 一.水轮发电机的飞轮力矩 绕定轴转动的物体都具有一定的转动惯量,转动惯量是物体在转动中的惯性大小的量度,即反映物体维持原有运动状态的能力。转动惯量_,是指刚体内各质点的质量与其到转轴距离平方的乘积之和。由转动惯量的定义可以看出,在质量相同的情况下,转动惯量与质量的分布有关,另外还与转轴的位置有关。 在一定大小的力矩作用下,转动惯量越大,角加速度越小,也就是角速度越不容易改变。利用转动物体的这种性质,可以减少机组转速的周期性波动,并且在机组发生甩负荷时,机组的转速不至于急剧上升。转动惯量对水轮发电机组的稳定,以及电力系统的稳定都有着极其重要的作用;因此,水轮发电机组的转动部分需要有一定的转动惯量。一些小型机组因为转动部分的质量不够大,往往需要装设一个飞轮来增加转动惯量。 工程上往往用飞轮力矩GD2来代替转动惯量,而飞轮力矩并不等于转动陨量,它们之间的关系近似为GD2=4gJ。 转动部分的重量与其惯性直径平方的乘积称为飞轮力矩GD2,对于给定的刚体和转轴,它是一个常数。GD2不能简单的看成是转子重量乘以某一直径的平方;只有在均质圆环的特殊情况下,才可以近似是这种关系。由于飞轮力矩主要集中在发电机的转子,转子的飞轮力矩约占整个机组飞轮力矩的90%左右;所以常用发电机转子的飞轮力矩来代表机组转动部分的飞轮力矩。
如果飞轮力矩过大,不但使发电机的重量和尺寸加大,制造成本提高,并且还会恶化机组的调节性能,因而对电力系统的暂态过程和动态稳定也有很大的影响。反之,若飞轮力矩太小,为限制转速上升率,则要求导叶加快关闭速度,这将使水轮机的引水压力管道的水压上升率升高。因此GD2的值与机组的转速上升率、水压上升率,以及调节时间等参数相互矛盾又相互制约着。 当发电机的基本尺寸决定以后,GD2的数值可以按经验公式估算GD2= KD3.48L 式中D——定子铁芯内径,m; L ――定子铁芯长度,m; K --- 经验系数,见表1-1 表1-1 K值表 二。.机组的惯性时间常数 这是一个与转动惯量相联系的量,表示机组在额定转矩作用下,把转子从静止状态加速到额定转速所需的时间,用Tmec表示,单位为秒 (s)。Tmec的大小就表征了机组本身惯性的大小,可按下式计算 ― 式中PN--额定功率,也有用额定容量(kVA)代替,kW;
nema标准中的计算是如下(转化公式):J=A×0.055613×(Pn^0.95)÷(n/1000)^2.4-0.004474×(Pn^1.5)÷(n/1000)^1.8 A小于等于1800rpm时取24,A大于1800rpm时取27 Pn为功率(kw) n 为同步转速 高压电动机在设计时,要求计算出转子的转动惯量。下面对计算方法做一分析。 转动惯量是物体在转动时惯性的度量,它不仅与物体质量的大小有关,还与物体质量分体情况有关。机械工程师手册给出了一些简单形状物体的转动惯量。 1、圆柱体沿轴线转动惯量: Kg?m2 (1) 式中:M —圆柱体质量Kg R —圆柱体外径半径 m 2、空心圆柱体沿轴线转动惯量: Kg?m2 (2) 式中: M —空心圆柱体质量Kg R —空心圆柱体外半径 m r —空心圆柱体内半径m 3、薄板沿对称线转动惯量: Kg?m2 (3) 式中:M —薄板质量Kg a —薄板垂直于轴线方向的宽度m 物体的转动惯量除了用J表示外,在工程上有的用物体的重量G和物体的回转直径D的平方的乘积GD2来表示,也称为物体的飞轮力矩或惯量矩,单位N?m2或Kg f m2。 物体的飞轮力矩GD2和转动惯量J之间的关系,用下式表示: N?m2 (4) 式中:g —重力加速度 g=9.81 m/s2 将重力单位N化为习惯上的重力单位Kgf ,则(4)变为: Kg f m2 (5) 由以上公式,可以对鼠笼型高压电机的转动惯量进行计算。计算时,将高压电机转子分解为转子铁心(包括导条和端环)、幅铁、转轴三部分,分别算出各部分的Jn,各部分的转动惯量相加即得电机的转动惯量J。如需要,按(5)式换算成飞轮力矩GD2。一般产品样本中要求给定的是转动惯量J,兰州引进的电磁设计程序计算出的是飞轮力矩GD2。 计算程序如下:
刚体绕轴转动惯性的度量。其数值为J=∑ mi*ri^2, 式中mi表示刚体的某个质点的质量,ri表示该质点到转轴的垂直距离。 ;求和号(或积分号)遍及整个刚体。转动惯量只决定于刚体的形状、质量分布和转轴的位置,而同刚体绕轴的转动状态(如角速度的大小)无关。规则形状的均质刚体,其转动惯量可直接计得。不规则刚体或非均质刚体的转动惯量,一般用实验法测定。转动惯量应用于刚体各种运动的动力学计算中。 描述刚体绕互相平行诸转轴的转动惯量之间的关系,有如下的平行轴定理:刚体对一轴的转动惯量,等于该刚体对同此轴平行并通过质心之轴的转动惯量加上该刚体的质量同两轴间距离平方的乘积。由于和式的第二项恒大于零,因此刚体绕过质量中心之轴的转动惯量是绕该束平行轴诸转动惯量中的最小者。 还有垂直轴定理:垂直轴定理 一个平面刚体薄板对于垂直它的平面轴的转动惯量,等于绕平面内与垂直轴相交的任意两正交轴的转动惯量之和。 表达式:Iz=Ix+Iy 刚体对一轴的转动惯量,可折算成质量等于刚体质量的单个质点对该轴所形成的转动惯量。由此折算所得的质点到转轴的距离,称为刚体绕该轴的回转半径κ,其公式为_____,式中M为刚体质量;I为转动惯量。 转动惯量的量纲为L^2M,在SI单位制中,它的单位是kg·m^2。 刚体绕某一点转动的惯性由更普遍的惯量张量描述。惯量张量是二阶对称张量,它完整地刻画出刚体绕通过该点任一轴的转动惯量的大小。 补充对转动惯量的详细解释及其物理意义: 先说转动惯量的由来,先从动能说起大家都知道动能E=(1/2)mv^2,而且动能的实际物理意义是:物体相对某个系统(选定一个参考系)运动的实际能量,(P势能实际意义则是物体相对某个系统运动的可能转化为运动的实际能量的大小)。 E=(1/2)mv^2 (v^2为v的2次方) 把v=wr代入上式(w是角速度,r是半径,在这里对任何物体来说是把物体微分化分为无数个质点,质点与运动整体的重心的距离为r,而再把不同质点积分化得到实际等效的r) 得到E=(1/2)m(wr)^2 由于某一个对象物体在运动当中的本身属性m和r都是不变的,所以把关于m、r的变量用一个变量K代替, K=mr^2 得到E=(1/2)Kw^2 K就是转动惯量,分析实际情况中的作用相当于牛顿运动平动分析中的质量的作用,都是一般不轻易变的量。 这样分析一个转动问题就可以用能量的角度分析了,而不必拘泥于只从纯运动角度分析转动问题。 为什么变换一下公式就可以从能量角度分析转动问题呢? 1、E=(1/2)Kw^2本身代表研究对象的运动能量 2、之所以用E=(1/2)mv^2不好分析转动物体的问题,是因为其中不包含转动物体的任何转动信息。 3、E=(1/2)mv^2除了不包含转动信息,而且还不包含体现局部运动的信息,因为里面的速度v只代表那个物体的质 心运动情况。 4、E=(1/2)Kw^2之所以利于分析,是因为包含了一个物体的所有转动信息,因为转动惯量K=mr^2本身就是一种积 分得到的数,更细一些讲就是综合了转动物体的转动不变的信息的等效结果K=∑ mr^2 (这里的K和上楼的J一样) 所以,就是因为发现了转动惯量,从能量的角度分析转动问题,就有了价值。 若刚体的质量是连续分布的,则转动惯量的计算公式可写成K=∑ mr^2=∫r^2dm=∫r^2σdV 其中dV表示dm的体积元,σ表示该处的密度,r表示该体积元到转轴的距离。 补充转动惯量的计算公式 转动惯量和质量一样,是回转物体保持其匀速圆周运动或静止的特性,用字母J表示。 对于杆: 当回转轴过杆的中点并垂直于轴时;J=mL^2/12 其中m是杆的质量,L是杆的长度。 当回转轴过杆的端点并垂直于轴时:J=mL^2/3 其中m是杆的质量,L是杆的长度。 对与圆柱体: 当回转轴是圆柱体轴线时;J=mr^2/2 其中m是圆柱体的质量,r是圆柱体的半径。 转动惯量定理:M=Jβ
刚体对轴转动惯量的计算 一、转动惯量及回转半径 在第一节中已经知道,刚体对某轴z 的转动惯量就就是刚体内各质点与该点到 z 轴距离 2 平方的乘积的总与,即 J z 口小。如果刚体质量连续分布,则转动惯量可写成 J z r 2 dm M (18-11) 由上面的公式可见,刚体对轴的转动惯量决定于刚体质量的大小以及质量分布情况 ,而与 刚体的运动状态无关,它永远就是一个正的标量。如果不增加物体的质量但使质量分布离轴 远一些, 就可以使转动惯量增大。例如设计飞轮时把轮缘设计的厚一些 ,使得大部分质量集中 在轮缘上,与转轴距离较远,从而增大转动惯量。相反,某些仪器仪表中的转动零件,为了提高灵 敏 度,要求零件的转动惯量尽量小一些 ,设计时除了采用轻金属、 塑料以减轻质量外,还要尽量 将材料多靠近转轴。 工程中常把转动惯量写成刚体总质量 M 与某一当量长度 的平方的乘积 (18-12) 相距为z 的点上,则此集中质量对z 轴的转动惯量与原刚体的转动惯量相同。 具有规则几何形状的均质刚体,其转动惯量可以通过计算得到,形状不规则物体的转动惯 量往往不就是由计算得出,而就是根据某些力学规律用实验方法测得。 二、简单形状物体转动惯量的计算 1.均质细直杆 dm 如图18-7所示,设杆长为I ,质量为M 。取杆上微段dx ,其质量为 图 18-7 杆对z c 轴的转动惯量为 对应的回转半径 2.均质细圆环 如图18-8所示均质细圆环半径为 R ,质量为M 。任取圆环上一微段,其质量为dm ,则对z z 称为刚体对于 z 轴的回转半径(或惯性半径),它的意义就是 ,设想刚体的质量集中在与 Mdx I ,则此 J z c I 2 2 x 2 dm 2/ —Ml 12 J z c I M 2、3 0.289I
飞轮的转动惯量确定后,就可以确定其各部分的尺寸了。需要注意的是, 在上述讨论飞轮转动惯量的求法时,假定飞轮安装在机械的等效构件上。实际 设计时,若希望将飞轮安装在其它构件上,则在确定其各部分尺寸时需要先将 计算所得的飞轮转动惯量折算到其安装的构件上。飞轮按构造大体可分为轮形 和盘形两种。 ●轮形飞轮 图中,这种飞轮由轮毂、轮辐和轮缘三部分组成。由于与轮缘相比,其它 两部分的转动惯量很小,因此,一般可略去不计。这样简化后,实际的飞轮转 动惯量稍大于要求的转动惯量。若设飞轮外径为D1,轮缘内径为D2,轮缘质量 为m,则轮缘的转动惯量为 (10.28) 当轮缘厚度H 不大时,可近似认为飞轮质量集中于其平均直径D 的圆周上, 于是得 (10.29) 式中, m D2称为飞轮矩 ,其单位为kg·m2。知道了飞轮的转动惯量 ,就可以 求得其飞轮矩。当根据飞轮在机械中的安装空间,选择了轮缘的平均直径D后, 即可用上式计算出飞轮的质量 m。 若设飞轮宽度为B (m),轮缘厚度为H(m),平均直径为D(m),材料密度 为ρ(kg·m3),则
(10.30) 在选定了D并由式(10.28)计算出m后,便可根据飞轮的材料和选定的比值H/B 由式(10.30)求出飞轮的剖面尺寸H和B,对于较小的飞轮,通常取H/B≈2, 对于较大的飞轮,通常取H/B≈1.5。 由式(10.29)可知,当飞轮转动惯量一定时,选择的飞轮直径愈大,则质量 愈小。但直径太大,会增加制造和运输困难,占据空间大。同时轮缘的圆周速度 增加,会使飞轮有受过大离心力作用而破裂的危险。因此,在确定飞轮尺寸时应 核验飞轮的最大圆周速度,使其小于安全极限值。 ●盘形飞轮 当飞轮的转动惯量不大时,可采用形状简单的盘形飞轮,如图所示。 设m ,D和B分别为其质量、外径及宽度,则整个飞轮的转动惯量为 (10.31) 当根据安装空间选定飞轮直径D后,即可由该式计算出飞轮质量m 。又因 ,故根据所选飞轮材料,即可求出飞轮的宽度B为 (10.32) 返回 【典型例题】
转动惯量指导书 力学实验室 2016年3月
转动惯量的测量 【预习思考】 1.转动惯量的定义式是什么? 2.转动惯量的单位是什么? 3.转动惯量与质量分布的关系? 4.了解单摆中摆长与周期的关系? 5.摆角对周期的影响。 【仪器照片】 【原理简述】 1、转动惯量的定义 构件中各质点或质量单元的质量与其到给定轴线的距离平方乘积的总和,即
∑ =2 J mr(1)转动惯量是刚体转动时惯性的量度,其量值取决于物体的形状、质量分布及转轴的位置。刚体的转动惯量有着重要的物理意义,在科学实验、工程技术、航天、电力、机械、仪表等工业领域也是一个重要参量。 图1 电磁系仪表的指示系统,因线圈的转动惯量不同,可分别用于测量微小电流(检 流计)或电量(冲击电流计)。在发动机叶片、飞轮、陀螺以及人造卫星的外形 设计上,精确地测定转动惯量,都是十分必要的。 2、转动惯量的公式推导 测定刚体转动惯量的方法很多,常用的有三线摆、扭摆、复摆等。本实验采用的是三线摆,是通过扭转运动测定物体的转动惯量,其特点是无力图像清楚、操作简便易行、适合各种形状的物体,如机械零件、电机转子、枪炮弹丸、电风扇的风叶等的转动惯量都可用三线摆测定。这种实验方法在理论和技术上有一定的实际意义本实验的目的就是要求学生掌握用三线摆测定物体转动惯量的方法,并验证转动惯量的平行轴定理。 两半径分别为r'和R'(R'>r')的刚性均匀圆盘,用均匀分布的三条等长l的无弹性、无质量的细线相连,半径为r'的圆盘在上,作为启动盘,其悬点到盘心的距离为r;半径为R'的圆盘在下,作为悬盘,其悬点到盘心的距离为R。将启动盘固定,则构成一振动系统, 称为三线摆(图2)。当施加力矩使悬盘转过角 θ后,悬盘将绕中心轴O O''做角简谐振动。 A A' O O' O'' r R B θ h2 h1 H . . . C'
农业机械学报 Transactions of the Chinese Society of Agricultural Machinery 1999年 第30卷 第5期 Vol.30 No.5 1999 回转机械转动惯量和动摩擦力矩测试方法 曾平 程光明 张军 常颖 【摘要】 针对机械的回转系统,提出一种整机测试其转动惯量和动摩擦力矩的新方法,分析了测试原理,推导了计算公式,并进行了初步的测试研究。实测证明,这种测试计算方法可以直接进行回转系统的惯量和动摩擦力矩的测试,测试的对象为回转系统中的全部零部件,因此这种测试计算方法为整机回转系统的测试研究提供了依据。 叙词: 回转机构 惯量 动摩擦 力矩 测试 STUDY ON MEASURING METHOD OF ROTATIONAL INERTIA AND DYNAMIC FRICTION MOMENT OF SLEWING GEAR Zeng Ping Cheng Guangming Zhang Jun Chang Ying (Jilin University of Technology) Abstract Rotational inertia and dynamic friction moment of slewing gear have an important influence on its overall performance. In this paper, a new measuring method of rotational inertia and dynamic friction moment of complete appliance was developed. The measuring principle was analyzed, the calculation formula was deduced and primary test research was made. Practical tests show that this measuring and calculating method could be directly used for measuring the rotational inertia and dynamic friction moment of a whole rotation system. All parts of the system are measuring objects. The measuring and calculating method lays the foundation of measurement research for the whole rotation system. Key words Slewing gear, Inertia, Dynamic friction, Moment, Measurement 前言 机械回转系统的惯量和动摩擦力矩是影响其工作性能、效率和寿命等的重要因素,随着机械向高速、精密、高效率的方向发展,对惯量和动摩擦力矩的测试要求也
真理惟一可靠的标准就是永远自相符合。土地是以它的肥沃和收获而被估价的;才能也是土地,不过它生产的不是粮食,而是真理。如果只能滋生瞑想和幻想的话,即使再大的才能也只是砂地或盐池,那上面连 小草也长不出来的。在伺服系统选型及调试中,常会碰到惯量问题。 其具体表现为: 在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知 机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;在调试时,正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提。此点在要求高速高精度的系统上表现尤为突出,这样,就有了惯量匹配的问题。 一、什么是惯量匹配”?/ g4 j) e* S/ J- o; I/ D4 B 1、根据牛顿第二定律:进给系统所需力矩T =系统传动惯量J X角加速度。角”。加速度。影响系统的动态特性,。越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。如果0变化,则系统反应将忽快忽慢,影响加工精度。由于马达选定后最大输出T值不变,如果希望。的变化小,则J应该尽量小。 2、进给轴的总惯量“扣伺服电机的旋转惯性动量JM +电机轴换算的负载惯性动量JL。负载惯量JL由(以平面金切机床为j 例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到马达轴 上的惯量组成。JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工 件等负载改变而变化。如果希望J变化率小些,则最好使JL所占比例小些。这就是通俗意 义上的惯量匹配”。 二、惯量匹配"如何确定?7 [1 K/ S- m' c4 a! g9 g9 K; ~$ P& _ 传动惯量对伺服系统的精度,稳定性,动态响应都有影响。惯量大,系统的机械常数 大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响 系统刚度的条件下,应尽量减小惯量。 衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。不同的机构, 对惯量匹配原则有不同的选择,且有不同的作用表现。不同的机构动作及加工质量要求对 JL与JM大小关系有不同的要求,但大多要求JL与JM的比值小于十以内。一句话,惯性匹 配的确定需要根据机械的工艺特点及加工质量要求来确定。对于基础金属切削机床,对于 伺服电机来说,一般负载惯量建议应小于电机惯量的5倍。:B- e* G3 G& m3 k) f3 ': O8 W# d 惯量匹配对于电机选型很重要的,同样功率的电机,有些品牌有分轻惯量,中惯量, 或大惯量。其实负载惯量最好还是用公式计算出来。常见的形体惯量计算公式在以前学的书 里都有现成的(可以去查机械设计手册)。我们曾经做过一试验,在一伺服电机的轴伸,加 一大的惯量盘准备用来做测试,结果是:伺服电机低速时停不住,摇头摆尾,不停地振荡怎 么也停不下来。后来改为:在两个伺服电机的轴伸对接加装联轴器,对其中一个伺服电机 通电,作为动力即主动,另一个伺服电机作为从动,即做为一个小负载。原来那个摇头摆尾的伺服电机,启动、运动、停止,运转一切正常! 三、惯量的理论计算的功式? 惯量计算都有公式,至于多重负载,比如齿轮又带齿轮,或涡轮蜗杆传动,只要分别 算出各转动件惯量然后相加即是系统惯量,电机选型时建议根据不同的电机进行选配。负载的转动惯量肯定是要设计时通过计算算出来拉,如果没有这个值,电机选型肯定是不那么 合理的,或者肯定会有问题的,这是选伺服的最重要的几个参数之一。至于电机惯量,电机 样本手册上都有标注。当然,对某些伺服,可以通过调整伺服的过程测出负载的惯量,作
转矩、转动懊量和飞轮转矩的折算 上节所介绍的是单轴拖动系统的运动方程式,但实际的拖动系统一般是多轴拖动系统,如图2-20所示。在这种情况下,为了列出这个系统的运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量都折算到某一根轴上,一般折算到电动机轴上,即折算成图2-18所示的最简单的典型单轴系统,折箅时的基本原则是折算前的多轴系统同折算后的单轴系统,在能量关系上或功率关系上保持不变。下面介绍折算方法。 负载转矩是静态转矩,可根据静态时功率守恒原则进行折算。 对于旋转运动,如图2-20(0所示,当系统勾速运动时,生产机械的负载功率为
』 式中,71和"^生产机械的负载转矩和旋转角速度。 图2-20多轴抱动系统 率的过程中有损耗, —输出功莾 1=11^11 (?―的) ,0^ 1^3 式中,》为电动机拖动产生机械运动时的传动效率,)^"^/^为传动机构的速比。 对于直线运动,如图2-20(10所示的卷扬机构就是一例。若生产机械直线运动部件的负载 力为尸,运动速度为^则所需的机械功率为 它反映在电动机轴上的机械功率为 如果是电动机拖动生产机械旋转或移动,则传动机构中的损耗应由电动机承担,根据功 率平銜关系就有丁,^^0?。 将^》^,^!^""/^代人上式可得 (^!^^-?. 551 "丄)』―"〉'―〉、1-11、 式中, ?为电动机轴的转速。 如果是生产机械拖动电动机旋转,例如,卷扬机构下放重物时,
本文章由轴承网站整理发布,转载请注明出处 第2章机电传动分析的基础知识 式中,八为生产机械拖动电动机运动时的传动效率。1.转动惯最和飞轮转矩的折算 由于转动惯量和飞轮转矩与运动系统的动能有关,因此,可根据动能守恒原则进行折箅。对于旋转运动,如图2-20(10所示的拖动系统,折算到电动机轴上的总转动惯量为 式中,^丄、入为电动机轴、中间传动轴、生产机械轴上的转动惯量;为电动机轴与中间传动轴之间的速比&^^/^为电动机轴与生产机械轴之间的速比;咖、的、^分别为电动机轴,中间传动轴、生产机械轴上的角速度。折箅到电动机轴上的总飞轮转 ^ ^ 001 式中,、(^ 、00[分别为电动机轴,中间传动轴、生产机械轴上的飞轮转矩。当速比)较大时,中间传动机构的转动惯虽^或飞轮转矩0巧,在折算后占整个系统的比重不大,实际工程中为了计算方便起见,多用适当加大电动机轴上的转动惯量^或飞轮转矩的方法,来忽略中间传动机构的转动惯量^或飞轮转矩00!的影响,于是有 I , 一般1?1 25。 对于直线运动[如图2 - 20(3〉所示的拖动系统],设直线运动部件的质量为加,折箅到电动机轴上的总转动惯量或总飞轮转矩分别为 或^;^-^!^+^^' +'^ 十365 ^ 11 九1*4^ ;!^/!^' 依照上述方法,就可把具有中间传动机构带有旋转运动部件或直线运动部件的多轴拖 动系统,折箅成等效的单轴拖动系统,将所求得的11,^代人式^-?"就可得到多轴拖动系统的运动方程式 "丄一一汀,!一」1^]"力"""―〃-鹏
8.5.3 飞轮主要尺寸的确定 飞轮的转动惯量确定后,就可以确定其各部分的尺寸了。需要注意的是, 在上述讨论飞轮转动惯量的求法时,假定飞轮安装在机械的等效构件上。实际 设计时,若希望将飞轮安装在其它构件上,则在确定其各部分尺寸时需要先将 计算所得的飞轮转动惯量折算到其安装的构件上。飞轮按构造大体可分为轮形 和盘形两种。 ●轮形飞轮 图中,这种飞轮由轮毂、轮辐和轮缘三部分组成。由于与轮缘相比,其它 两部分的转动惯量很小,因此,一般可略去不计。这样简化后,实际的飞轮转 动惯量稍大于要求的转动惯量。若设飞轮外径为D1,轮缘内径为D2,轮缘质量 为m,则轮缘的转动惯量为 (10.28) 当轮缘厚度H 不大时,可近似认为飞轮质量集中于其平均直径D 的圆周上, 于是得 (10.29) 式中, m D2称为飞轮矩 ,其单位为kg·m2。知道了飞轮的转动惯量 ,就可以 求得其飞轮矩。当根据飞轮在机械中的安装空间,选择了轮缘的平均直径D后, 即可用上式计算出飞轮的质量 m。 若设飞轮宽度为B (m),轮缘厚度为H(m),平均直径为D(m),材料密度 为ρ(kg·m3),则
(10.30) 在选定了D并由式(10.28)计算出m后,便可根据飞轮的材料和选定的比值H/B 由式(10.30)求出飞轮的剖面尺寸H和B,对于较小的飞轮,通常取H/B≈2, 对于较大的飞轮,通常取H/B≈1.5。 由式(10.29)可知,当飞轮转动惯量一定时,选择的飞轮直径愈大,则质量 愈小。但直径太大,会增加制造和运输困难,占据空间大。同时轮缘的圆周速度 增加,会使飞轮有受过大离心力作用而破裂的危险。因此,在确定飞轮尺寸时应 核验飞轮的最大圆周速度,使其小于安全极限值。 ●盘形飞轮 当飞轮的转动惯量不大时,可采用形状简单的盘形飞轮,如图所示。 设m ,D和B分别为其质量、外径及宽度,则整个飞轮的转动惯量为 (10.31) 当根据安装空间选定飞轮直径D后,即可由该式计算出飞轮质量m 。又因 ,故根据所选飞轮材料,即可求出飞轮的宽度B为 (10.32) 返回 【典型例题】
刚体对轴转动惯量的计算 一、转动惯量及回转半径 在第一节中已经知道,刚体对某轴z 的转动惯量就就是刚体内各质点与该点到z 轴距离 平方的乘积的总与,即∑=2 i i z r m J 。如果刚体质量连续分布,则转动惯量可写成 ?=M z dm r J 2 (18-11) 由上面的公式可见,刚体对轴的转动惯量决定于刚体质量的大小以及质量分布情况,而与 刚体的运动状态无关,它永远就是一个正的标量。如果不增加物体的质量但使质量分布离轴远一些,就可以使转动惯量增大。例如设计飞轮时把轮缘设计的厚一些,使得大部分质量集中在轮缘上,与转轴距离较远,从而增大转动惯量。相反,某些仪器仪表中的转动零件,为了提高灵敏度,要求零件的转动惯量尽量小一些,设计时除了采用轻金属、塑料以减轻质量外,还要尽量将材料多靠近转轴。 工程中常把转动惯量写成刚体总质量M 与某一当量长度ρ的平方的乘积 2z z M J ρ= (18-12) z ρ称为刚体对于z 轴的回转半径(或惯性半径),它的意义就是,设想刚体的质量集中在与z 轴 相距为z ρ的点上,则此集中质量对z 轴的转动惯量与原刚体的转动惯量相同。 具有规则几何形状的均质刚体,其转动惯量可以通过计算得到,形状不规则物体的转动惯量往往不就是由计算得出,而就是根据某些力学规律用实验方法测得。 二、简单形状物体转动惯量的计算 1. 均质细直杆 如图18-7所示,设杆长为l ,质量为M 。取杆上微段dx,其质量为 dx l M dm = ,则此 图18-7 杆对z c 轴的转动惯量为 220 2 20 2 12122Ml dx l M x dm x J l l z c ===?? 对应的回转半径 l l M J c z z 289.03 2== = ρ 2. 均质细圆环 如图18-8所示均质细圆环半径为R,质量为M 。任取圆环上一微段,其质量为dm ,则对z
机械原理课程设计说明书题目:铰链式颚式破碎机方案分析 班级: 姓名: 学号: 指导教师: 成绩: 2011年11月10日
目录 一设计题目 (1) 二已知条件及设计要求 (1) 2.1已知条件 (1) 2.2设计要求 (2) 三. 机构的结构分析 (2) 3.1六杆铰链式破碎机 (2) 3.2四杆铰链式破碎机 (2) 四. 机构的运动分析 (2) 4.1六杆铰链式颚式破碎机的运动分析 (2) 4.2四杆铰链式颚式破碎机的运动分析 (5) 五.机构的动态静力分析 (7) 5.1六杆铰链式颚式破碎机的静力分析 (8) 5.2四杆铰链式颚式破碎机的静力分析 (13) 六. 工艺阻力函数及飞轮的转动惯量函数 (18) 6.1工艺阻力函数程序 (18) 6.2飞轮的转动惯量函数程序 (19) 七 .对两种机构的综合评价 (23) 八 . 主要的收获和建议 (23) 九 . 参考文献 (23)
一、设计题目:铰链式颚式破碎机方案分析 二、已知条件及设计要求 2.1已知条件 (a) 六杆铰链式破碎机(b) 工艺阻力 (c) 四杆铰链式破碎机 图(a)所示为六杆铰链式破碎机方案简图。主轴1的转速为n1 = 170r/min,各部尺寸为:l O1A = 0.1m, l AB = 1.250m, l O3B = 1m, l BC = 1.15m, l O5C = 1.96m, l1=1m, l2=0.94m, h1=0.85m, h2=1m。各构件质量和转动惯量分别为:m2= 500kg, J s2 = 25.5kg·m2, m3 = 200kg, J s3 = 9kg·m2, m4 = 200kg, J s4 = 9kg·m2, m5=900kg, J s5=50kg·m2, 构件1的质心位于O1上,其他构件的质心均在各杆的中心处。D为矿石破碎阻力作用点,设L O5D = 0.6m,破碎阻力Q在颚板5的右极限 位置到左极限位置间变化,如图(b)所示,Q力垂直于颚板。 图(c)是四杆铰链式颚式破碎机方案简图。主轴1 的转速n1=170r/min。l O1A = 0.04m, l AB = 1.11m,l1=0.95m, h1=2m,l O3B=1.96m,破碎阻力Q的变化规律与六杆铰链式破碎机相同,Q 力垂直于颚板O3B,Q力作用点为D,且l O3D = 0.6m。各杆的质量、转动惯量为m2 = 200kg,
第7章 机械的运转及其速度波动的调节 7.1填空题 7.1.1.某机器的主轴平均角速度ωm rad /s =100,机器运转的速度不均匀系数δ=005.,则该机器的最大角速度ωmax 等于___ ___rad/s ,最小角速度ωm i n 等于__ ____rad/s 。 7.1.2.机器等效动力学模型中的等效力(矩)是根据___ ___的原则进行转化的,等效质量(转动惯量)是根据____ __的原则进行转化的。 7.1.3.机器运转时的速度波动有___ ___速度波动和___ ___速度波动两种,前者采用____ __,后者采用_ _____进行调节。 7.2判断题 7.2.1.为了使机器稳定运转,机器中必须安装飞轮。( ) 7.2.2.机器中安装飞轮后,可使机器运转时的速度波动完全消除。( ) 7.2.3.为了减轻飞轮的重量,最好将飞轮安装在转速较高的轴上。( ) 7.2.4.机器作稳定运转,必须在每一瞬时驱动功率等于阻抗功率。( ) 7.2.5.机器等效动力学模型中的等效质量(转动惯量)是一个假想质量(转动惯量),它不是原机器中各运动构件的质量(转动惯量)之和,而是根据动能相等的原则转化后计算得出的。( ) 7.3选择题 7.3.1.在机械稳定运转的一个运动循环中,应有____ __。 (A)惯性力和重力所作之功均为零;(B)惯性力所作之功为零,重力所作之功不为零;(C)惯性力和重力所作之功均不为零;(D)惯性力所作之功不为零,重力所作之功为零。 7.3.2.机器运转出现周期性速度波动的原因是______。 (A)机器中存在往复运动构件,惯性力难以平衡;(B)机器中各回转构件的质量分布不均匀; (C)在等效转动惯量为常数时,各瞬时驱动功率和阻抗功率不相等,但其平均值相等,且有公共周期;(D)机器中各运动副的位置布置不合理。 7.3.3.机器中安装飞轮的一个原因是为了______。 (A)消除速度波动;(B)达到稳定运转; (C)减小速度波动;(D)使惯性力得到平衡,减小机器振动。 7.3.4.图7.1示传动系统中,已知 ,80 ,20 ,60 ,204321====z z z z 如以轮1为等效构件,则齿轮4的等效转动惯量将是它自身转动惯量的______。 (A)12倍; (B)144倍; (C)112; (D)1144 图7.1 题7.3.5图 108
手把手教你应用WorkingModel和Excel求机构的飞轮转动惯量——以偏置曲柄滑块机构为例 题目 一偏置曲柄滑块机构,如图所示: 已知: 曲柄AB——长200 mm,质心在回转中心A,质量10kg,转动惯量0.08kgm2,预期转速n1=60r/min; 连杆BC——长600mm,质心在杆的几何中心,质量30kg,转动惯量0.12kgm2; 滑块3 ——质量20Kg,工作行程受工作阻力2000N 偏距e——100mm M为常数,许用速度不均匀系数[δ]=0.02 驱动力矩 ed 求:加在曲柄轴上的飞轮的转动惯量J F
1 利用WorkingModel软件建立机构模型 1.1 打开Working Model软件,设置单位(view/Numbers and units…) 弹出对话框,在“Unit System”中选择“SI(radians)”
此时,长度(Distance)设为“米”(Meters),质量(Mass)为“公斤”(Kilograms),时间(Time)默认为“秒”(Seconds),角度(Rotation)为“弧度”(Radians)。 1.2 建立构件 1.2.1 建立曲柄1 (1)点击图标,指定宽高: 高度h:0.02m(自己指定的), 宽度W:0.2m (杆长要求的)。 (2)双击构件,弹出属性窗体(Properties),指定质量(mass)为10kg和转动惯量(moment)为0.08kgm2。
(3)单击选中构件,菜单Window/Appearance,改构件名为“AB”,勾选show name(显示名称),勾选show center of ma(显示质心) (4)单击选中构件,菜单Window/Geometry,在COM(Center of Mass)栏,点选offset(质心偏移),第一行(X方向偏移)输入-0.1m(质心默认在中点,往左移动到端点,输入杆长一半的负值)。 1.2.2 建立连杆2 (1)点击图标,指定宽高: 高度h:0.02m(自己指定的,和曲柄同), 宽度W:0.6m。