陀螺经纬仪观测方法研究与应用
【摘要】陀螺经纬仪(gyro theodolite)是带有陀螺仪装置、用于测定直线真方位角的经纬仪。其关键装置之一是陀螺仪,简称陀螺,又称回转仪。陀螺经纬仪的用途在于它能够确定真北方向(子午面)在水平度盘上的读数,在跟踪状态下即陀螺轴进动(摆动)中心所对应的水平度盘读数,求M的方式不同,确定了两大类陀螺经纬仪定向观测方法:跟踪式与不跟踪式。本文对观测精度进行分析后总结出观测方法、注意事项。
【关键词】陀螺经纬仪;观测方法;研究与应用
引言
陀螺经纬仪(见图1)主要由一个高速旋转的转子支承在一个或两个框架上而构成。具有一个框架的称二自由度陀螺仪;具有内外两个框架的称三自由度陀螺仪。经纬仪上安置悬挂式陀螺仪,是利用其具指北性确定真子午线北方向,再用经纬仪测定出真子午线北方向至待定方向所夹的水平角,即真方位角。指北性,是指悬挂式者在受重力作用和地球自转角速度影响下,陀螺轴将产生进动、逐渐向真子面靠拢,最终达到以真子面为对称中心,作角简谐运动的特性。确定真子午线北方向的常用方法,有中天法和逆转点法。
图1 陀螺经纬仪
目前主要应用于矿用巷道施工测量,以及盾构掘进中的水平及真北方向测量,可大大弥补导线过长所造成的精度损失。
1 陀螺经纬仪观测方法简介
1.1 逆转点法
逆转点法是一种最基本的陀螺定向方法。用逆转点法进行定向观测时,要求照准部处于跟踪状态,即在观测过程中使目镜分划板的零刻线始终与陀螺灵敏部的摆动光标相重合。当跟踪陀螺灵敏部到逆转点时,在经纬仪水平读盘上读数u1;跟踪到另一个逆转点时,在经纬仪水平读盘上读数u2。连续读取五个逆转点读数u1、u2、u3、u4、u5,取舒勒平均值计算结果。五个读数可以得到三个舒勒平均值N1、N2、N3:
则一次测定陀螺方位角的平均值为:
N均=(N1+N2+N3)/3=(u1+3u2+4u3+3u4+u5)/12。
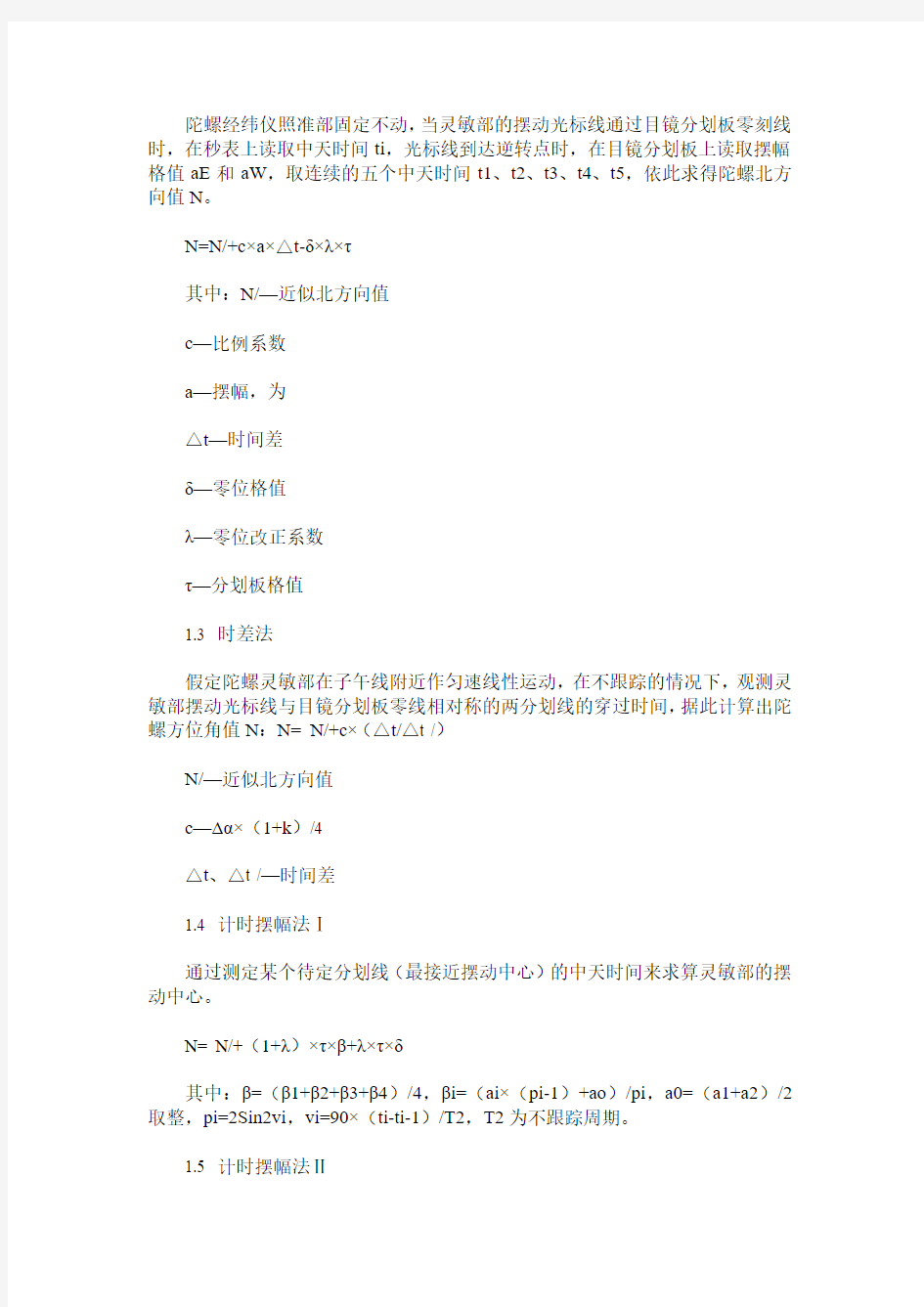
1.2 中天法
陀螺逆转点法定向及精度评定 摘要 隧道或井巷工程测量导线布设的形式因受巷道形状的制约,若单纯采用改变导线布设形式或提高测角次数与精度等方法,往往难以满足工程施工对于测量的精度要求。陀螺经纬仪是测量井下导线边方位角、提高测量精度的重要仪器。尤其是在贯通测量中陀螺经纬仪的应用非常广泛。贯通测量是一项十分重要的测量工作,必须严格按照设计要求进行。巷道贯通后,其接合处的偏差不能超过一定限度,否则就会给采矿工程带来不利影响,甚至造成很大的损失。本文对陀螺经纬仪工作原理介绍,以及陀螺经纬仪在贯通测量中的精度评定。陀螺经纬仪在不同领域的贯通测量工作中运用实例的分析,总结出在贯通测量导线加测陀螺定向边的最佳位置。 关键词:陀螺定向,贯通测量,陀螺经纬仪,精度评定 ABSTRACT Tunnel or shaft engineering measurement wires for the form of roadway, if simple shape by changing arrangement forms or improve wires and precision Angle measurement methods, and often difficult to satisfy the measurement accuracy for engineering construction. Gyro theodolite is measured in wire edge Angle, improve the measuring precision instruments. Especially in the measurement of the photoelectric theodolite gyro breakthrough is used extensively. Through measurement is a very important measurement work, must strictly according to the design requirements. The roadway expedite, its joint deviation cannot exceed a certain limit, otherwise they will be detrimental to the mining project, and even cause great losses. This paper introduces working principle of gyro theodolite, as well as the breakthrough in the measurement of the gyro theodolite accuracy assess. Gyro theodolite in different fields
陀螺仪的作用 这陀螺仪和重力传感器有什么区别呢?区别很多,但最大的区别就是重力传感对于空间上的位移感受维较少,能做到6个方向的感应就已经很不错了,而陀螺仪则是全方位的。这很重要,毫不夸张的说,这两者不是一个级别上的产品。 可能看到这里,大家还是会觉得有些迷惑,既然陀螺仪很厉害,那么它在手机上到底有什么用呢?我们不妨来看看。 第一大用途,导航。陀螺仪自被发明开始,就用于导航,先是德国人将其应用在V1、V2火箭上,因此,如果配合GPS,手机的导航能力将达到前所未有的水准。实际上,目前很多专业手持式GPS上也装了陀螺仪,如果手机上安装了相应的软件,其导航能力绝不亚于目前很多船舶、飞机上用的导航仪。 第二大用途,可以和手机上的摄像头配合使用,比如防抖,这会让手机的拍照摄像能力得到很大的提升。 第三大用途,各类游戏的传感器,比如飞行游戏,体育类游戏,甚至包括一些第一视角类射击游戏,陀螺仪完整监测游戏者手的位移,从而实现各种游戏操作效果。有关这点,想必用过任天堂WII的兄弟会有很深的感受。 第四大用途,可以用作输入设备,陀螺仪相当于一个立体的鼠标,这个功能和第三大用途中的游戏传感器很类似,甚至可以认为是一种类型。 第五大用途,也是未来最有前景和应用范围的用途。下面重点说说。那就是可以帮助手机实现很多增强现实的功能。增强现实是近期才冒出的概念,和虚拟现实一样,是计算机的一种应用。大意是可以通过手机或者电脑的处理能力,让人们对现实中的一些物体有跟深入的了解。如果大家不理解,举个例子,前面有一个大楼,用手机摄像头对准它,马上就可以在屏幕上得到这座大楼的相关参数,比如楼的高度,宽度,海拔,如果连接到数据库,甚至可以得到这座大厦的物主、建设时间、现在的用途、可容纳的人数等等。 这种增强现实技术可不是用来满足大家的好奇心,在实际生产上,其用途非常广泛,比如盖房子,用手机一照,就知道墙是否砌歪了?歪了多少?再比如,假如您是一位伊拉克抵抗美军的战士,平时只需要揣着一部此类手机,去基地那里转转,出来什么坦克,装甲车或者直升机,用手机对准拍下,马上就能判断出武器的型号,速度、运动方向
第十章陀螺经纬仪概述 第一节陀螺经纬仪的工作原理 一、陀螺经纬仪的工作原理 陀螺经纬仪是一种高精度的定向仪器可以直接测定某条边的真方位角。因此陀螺经纬仪在隧洞测量中,特别是矿山测量和地铁测量中有着重要作用。下面我们主要阐述一下陀螺经纬仪的基本工作原理。首先我们先了解一下陀螺及陀螺仪的特性。 (一)陀螺 凡是绕定点高速旋转的物体,或绕自身轴高速旋转的任意刚体,都称为陀螺。如图1-1所示,设刚体上有一等效的方向支点O。以O为原点,作固定在刚体上的动坐标系O-XYZ。刚体绕此支点转动的角速度在动坐标轴上的分量分别为ωx、ωy、ωz,若能满足以下条件:
成的陀螺仪来说,不管它们的用途如何不同,结构上如何变化,它们都是按照陀螺的这两个基本特性来工作的。 1.进动性 陀螺仪的重要部件是一个高速旋转的均匀质子。图10-2如果转子以高速旋转着,其动量矩 与x 轴重合。这时再把上下方向的力施加在旋转轴的两端,在此力矩的作用下H 矢量的端点将沿力矩方向运动,即在xy 平面内向y 方向转去,也即这时转子将不是绕y 轴转动而是绕Z 轴逆时针转动。 这就是陀螺仪的进动性。 图10-2 2.定轴性 如果动量矩的存在,或转子高速旋转,是陀螺仪产生进动的内因;而外力矩的作用是陀螺仪产生进动的外因。两者缺一不可。如果外力矩为零,则陀螺仪保持其动量矩的方向和大小不变。即此陀螺仪的另一特性:定轴性。 在惯性导航系统中人们常利用陀螺仪的定轴性建立方向基础。但是实际陀螺仪总会受到各种干扰因素的影响。如转子质量不匀,支撑元件的摩擦力,温度变化引起陀螺仪元件尺寸的变化,导电丝的弹性干扰力矩,外界磁场的干扰力矩等等。它们会引起陀螺轴的漂移,漂移率是陀螺质量好坏的主要指标。 在陀螺经纬仪中人们主要利用陀螺的进动性来寻找真北方向,找到了真北方向才可以测定地上直线的方位角。至于为什么能用陀螺找到真北方向,这要从地球自转对陀螺的作用谈起。 (三) 陀螺经纬仪的工作原理 x y
陀螺仪工作原理与应用(陀螺经纬仪Jyro Station) 来源:译自日本《测量》06年8月号作者:日本测量仪器工业会更新日期:2006-9-22 阅读次数:3235 为了求得测量的基准方位和日照时间的方位,必须使用磁针罗盘仪进行天体观测。然而,磁针罗盘仪的精度有限,在天体观测中还要受到确保通视、天气、场所和时间等观测条件的影响。为了解决这些问题,可采用利用了力学原理求得真北的陀螺经纬仪。陀螺经纬仪在隧道测量以及由于不能和已知点通视而无法确定方位、方向角的情况下都能发挥很大的作用。 (图1:陀螺工作站) 1、陀螺工作站的原理 高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于铅直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的
运动(岁差运动)。当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止 时可加以应用。 2、陀螺工作站的构造 (图4:陀螺经纬仪的构造 0点调整螺丝,吊线,照明灯,陀螺转子、指针、供电用馈线、反 射镜、陀螺马达、刻度线、目镜)。
陀螺经纬仪的陀螺装置由陀螺部分和电源部分组成。此陀螺装置与全站仪结合而成。陀螺本体在装置内用丝线吊起使旋转轴处于水平。当陀螺旋转时,由于地球的自转,旋转轴在水平面内以真北为中心产生缓慢的岁差运动。旋转轴的方向由装置外的目镜可以进行观测,陀螺指针的振动中心方向指向真北。利用陀螺经纬仪的真北测定方法有“追尾测定”和“时间测定”等。 追尾测定[反转法] 利用全站仪的水平微动螺丝对陀螺经纬仪显示岁差运动的刻度盘进行追尾。在震动方向反转的点上(此时运动停止)读取水平角。如此继续测定之,求得其平均震动的中心角。用此方法进行20分钟的观测可以求得+/-0。5分的真北方向。 时间测定[通过法] 用追尾测定观测真北方向后,陀螺经纬仪指向了真北方向,其指针由于岁差运动而左右摆动。用全站仪的水平微动螺丝对指针的摆动进行追尾,当指针通过0点时反复记录水平角,可以提高时间测定的精度,并以+/-20秒的精度求得真北方向。 (图2:摇头运动) (图3:向子午线的岁差运动)
陀螺仪工作原理与应用(陀螺经纬仪 Jyro Station)专业 2010-04-25 11:45:57 阅读19 评论0 字号:大中小订阅 来源:译自日本《测量》06年8月号作者:日本测量仪器工业会更新日 期:2006-9-22 阅读次数:10977 为了求得测量的基准方位和日照时间的方位,必须使用磁针罗盘仪进行天体观测。然而,磁针罗盘仪的精度有限,在天体观测中还要受到确保通视、天气、场所和时间等观测条件的影响。为了解决这些问题,可采用利用了力学原理求得真北的陀螺经纬仪。陀螺经纬仪在隧道测量以及由于不能和已知点通视而无法确定方位、方向角的情况下都能发挥很大的作用。 (图1:陀螺工作站) 1、陀螺工作站的原理 高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于铅直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止时可加以应用。 2、陀螺工作站的构造 (图4:陀螺经纬仪的构造 0点调整螺丝,吊线,照明灯,陀螺转子、指针、供电用馈线、反射镜、陀螺马达、刻度线、目镜)。 陀螺经纬仪的陀螺装置由陀螺部分和电源部分组成。此陀螺装置与全站仪结合而成。陀螺本体在装置内用丝线吊起使旋转轴处于水平。当陀螺旋转时,由于地球的自转,旋转轴在水平面内以真北为中心产生缓慢的岁差运动。旋转轴的方向由装置外的目镜可以进行观测,陀螺指针的振动中心方向指向真北。利用陀螺经纬仪的真北测定方法有“追尾测定”和“时间测定”等。 追尾测定[反转法] 利用全站仪的水平微动螺丝对陀螺经纬仪显示岁差运动的刻度盘进行追尾。在震动方向反转的点上(此时运动停止)读取水平角。如此继续测定之,求得其平均震动的中心角。用此方法进行20分钟的观测可以求得+/-0。5分的真北方向。 时间测定[通过法] 用追尾测定观测真北方向后,陀螺经纬仪指向了真北方向,其指针由于岁差运动而左右摆动。用全站仪的水平微动螺丝对指针的摆动进行追尾,当指针通过
简单介绍各类陀螺仪的使用 最近,被安排调试MPU6050模块,之前从没接触过相关MEMS传感器,所以感觉一头雾水。幸好还有网络,还有强大的兄弟团的支持。不过,很可惜,网上大部分资料只是简单教你如何配置MPU6050并从数据寄存器读出测量值,而之后的数据处理很少涉及。这使得像我一样的菜鸟们十分抓狂。所以在此开辟专栏,希望大家集思广益,共同征服MPU6050。对于那些还不知道MPU6050是啥玩意的童鞋们,百度文科会告诉你。由于对此传感器的介绍铺天盖地,所以此处就一笔带过,不再详细介绍。 毫无疑问,无论是学习MPU6050,还是其他ICs,大家首先想到的是数据手册。没错,MPU6050有两个非常重要的数据手册,一个是PS-MPU- 6000A,另一个是RM-MPU-6000A。其他的都是原厂评估板的相关使用手册,对我们屌丝来说可以不用拜读了。PS-MPU-6000A是产品说明书,主要介绍了内部的结构、技术参数以及封装等内容;RM-MPU-6000A(*)是寄存器映射和描述文档,里面详细介绍了MPU6050内部各个寄存器的实现功能,对我们用户来说相当重要。网上虽然有一些翻译的中文资料,但自己还是硬着头皮仔细研读了一下两个手册。下面就把自己的心得和大家一起分享一下(产品说明书网上已有中文版,这里着重讲一下第二个数据手册)。 RM-MPU-6000A列出了将近100个寄存器,还有一部分寄存器没有列出来,估计是不对用户开放的。这些寄存器大致上可分为如下几类:自检寄存器、陀螺仪加速度配置寄存器、总线配置相关寄存器、中断配置寄存器、数据寄存器、第三方传感器配置寄存器、FIFO相关寄存器、系统配置寄存器。第一次看到这么多寄存器时倒吸一口凉气,相信很多网友会跟我有相同的感觉。其实,仔细分析下来,真正需要你配置的寄存器也就一半左右。由于我手中的MPU6050模块并没有外接第三方传感器,所以需要配置的寄存器就更少了。下面我们就一起来学习一下一些比较重要的寄存器。 系统配置寄存器 1、PWR_MGMT_1 该寄存器用来配置工作模式和时钟源。此外,还可以通过配置该寄存器复位整个器件以及禁止使用温度传感器。偶设置为0x08,处于正常工作模式,禁止使用温度传感器,选用内部8MHZ的时钟源。 2、PWR_MGMT_2 该寄存器用来配置加速度计模式下的唤醒频率和待机模式。 3、USER_CTRL 该寄存器用来使能或禁止FIFO缓冲、IIC主模式、和IIC接口。 4、MOT_DETECT_CTRL 该寄存器用来添加加速度计上电的延迟时间,默认是延时为4ms。 5、SIGNAL_PATH_RESET
GAK-1陀螺经纬仪操作说明: GAK-1陀螺经纬仪是上架悬挂式陀螺仪器,由陀螺仪、经纬仪、逆变器(带蓄电池)和三脚架组成。 一、首先进行陀螺仪悬带零位测定: 先将经纬仪整平并固定照准部,下放陀螺灵敏部,从读数目镜中观测灵敏部的摆 动,在分划板上连续读三个逆转点读数,估读到0.1格。第一和第三个逆转点取 平均后,再和第二个逆转点取平均得到陀螺仪的零位。同时还需要用秒表测定周 期。 二、粗略定向 在测定已知边和定向边的陀螺方位角之前,必须把经纬仪望远镜视准轴置于近似 北方。最常用的方法为两个逆转点法。 三、精密定向 精密定向就是精确测定已知边和定向边的陀螺方位角。精密定向一般采用逆转点 法或者中天法。 逆转点法: 1、严格整置经纬仪,以一个测回测定待定和已知测线的方向值,然后将仪器大 致对正北方。 2、锁紧摆动系统,启动陀螺马达,待达到额定转速后,下放陀螺灵敏部,进行 粗略定向,再制动陀螺并托起锁紧,将望远镜视准轴转到近似北方位置,固 定照准部,把水平微动螺旋调到行程中间位置。 3、打开陀螺照明,下放陀螺灵敏部,进行测前悬带零位观测,同时用秒表记录 自摆周期。零位观测完毕,托起并锁紧灵敏部。 4、启动陀螺马达,达到额定转速后,慢慢下放灵敏部到半脱离位置,稍停数秒, 再全部下放。用水平微动螺旋微动照准部,让光标像与分划板零刻划线随时 重合,在摆动到逆转点时,连续读取5个逆转点读数。然后锁紧灵敏部,制 动陀螺马达。 5、进行测后零位观测 6、以一个测回测定待定和已知测线的方向值 中天法: 和逆转点法一样进行粗略定向和零位测定,启动陀螺马达,到达额定转速后下放 灵敏部,经限幅,使光标像摆幅不超过目镜视场。然后按下列顺序观测:、 1、灵敏部指标线经过分划板零刻划线时启动专用秒表,读取中天时间 2、灵敏部指标线到达逆转点时,在分划板上读取摆幅读数 3、灵敏部指标线返回零刻划线时读出秒表上的读数 4、灵敏部指标线到达另一逆转点时读取摆幅读数 5、灵敏部指标线返回零刻划线时再读取秒表上中天时间 重复上述操作,一次定向需连续测定5次中天时间,记录不跟踪摆动周期。 观测完毕,托起并锁紧灵敏部,制动陀螺马达。 6、进行测后零位观测 7、以一个测回测定待定和已知测线的方向值
陀螺经纬仪工作原理与应用 【2007-4-28来源:中翰仪器网】 为了求得测量的基准方位和日照时间的方位,必须使用磁针罗盘仪进行天体观测。然而,磁针罗盘仪的精度有限,在天体观测中还要受到确保通视、天气、场所和时间等观测条件的影响。为了解决这些问题,可采用利用了力学原理求得真北的陀螺经纬仪。陀螺经纬仪在隧道测量以及由于不能和已知点通视而无法确定方位、方向角的情况下都能发挥很大的作用。 (图1:陀螺工作站) 1、陀螺工作站的原理 高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于铅直方向的倾向。而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。当轴平行于子午线而静止时可加以应用。
2、陀螺工作站的构造 (图4:陀螺经纬仪的构造 0点调整螺丝,吊线,照明灯,陀螺转子、指针、供电用馈线、反射镜、陀螺马达、刻度线、目镜)。 陀螺经纬仪的陀螺装置由陀螺部分和电源部分组成。此陀螺装置与全站仪结合而成。陀螺本体在装置内用丝线吊起使旋转轴处于水平。当陀螺旋转时,由于地球的自转,旋转轴在水平面内以真北为中心产生缓慢的岁差运动。旋转轴的方向由装置外的目镜可以进行观测,陀螺指针的振动中心方向指向真北。利用陀螺经纬仪的真北测定方法有“追尾测定”和“时间测定”等。
追尾测定[反转法] 利用全站仪的水平微动螺丝对陀螺经纬仪显示岁差运动的刻度盘进行追尾。在震动方向反转的点上(此时运动停止)读取水平角。如此继续测定之,求得其平均震动的中心角。用此方法进行20分钟的观测可以求得+/-0。5分的真北方向。 时间测定[通过法] 用追尾测定观测真北方向后,陀螺经纬仪指向了真北方向,其指针由于岁差运动而左右摆动。用全站仪的水平微动螺丝对指针的摆动进行追尾,当指针通过0点时反复记录水平角,可以提高时间测定的精度,并以+/-20秒的精度求得真北方向。 (图2:摇头运动) (图3:向子午线的岁差运动) (图5:指针与刻度盘刻度线/0点/指针)
光纤陀螺仪的应用及发展 谷军,蔺晓利,何南,姜凤娇,邓长辉 (大连海洋大学信息工程学院) 摘要:本文介绍了光纤陀螺的工作原理,并根据光纤陀螺的特点介绍了在各个领域的应用,阐述了光纤陀螺在国内外的发展现状,并指出了光纤陀螺的发展趋势。从发展角度看,光纤陀螺仪将成为21世纪前期的发展重点。 关键词:光纤陀螺;现状;应用; 0 引言 萨格纳克(Sagnac)在1913年首先论证了运用无运动部件的光学系统能够检测出相对惯性空间的旋转的奇特现象,现在统称为萨格纳克效应。1976年Vali和Shorthill首次提出了光纤陀螺(Fiber optic gyro)的概念,它标志着第二代光学陀螺的诞生。光纤陀螺一问世就以其明显的优点、结构的灵活性以及诱人的前景引起了世界上许多科学家和工程师的普遍关注。国内对光纤陀螺的研究也有20多年的历史,经历开环到闭环的研究历程。在20多年的研究过程中,光纤陀螺的广泛应用前景已经得到了专家的认可,光纤陀螺作为惯性技术的核心器件,已经逐渐成为陀螺市场的主流产品。人类对光纤陀螺的需求也变得十分迫切。 光纤陀螺的应用非常广泛,是基于Sagnac效应的原理工作的。作为继激光陀螺仪之后出现的新一代陀螺,各国的研制工作已经取得了重大的进展。光纤陀螺仪的研制对惯性导航和控制领域十分重要,随着计算机、微电子和光纤技术的发展和应用,它将取代传统的机械陀螺和平台惯导系统。与机械陀螺相比,光纤陀螺无运动部件、使用寿命长;全固化结构、抗冲击能力强;测量动态范围大、无预热时问、启动时问短;不受地球吸引力影响;工艺相对简单,价格便宜;对捷联应用有先天优势。与激光陀螺相比,光纤陀螺的成本低、性价比高;体积小、功耗低、应用灵活;克服了激光陀螺闭锁带来的负效应;随着工艺和信号处理方案的发展,精度也可以和激光陀螺相当。 1 光纤陀螺仪 光纤陀螺仪是光学陀螺仪的一种。所谓光学陀螺仪就是利用萨格纳克Sagnac)效应构成的陀螺仪。利用光纤线圈构成的干涉仪效应来敏感角运动的装置称为干涉型光纤陀螺仪(IFOG);采用光纤作为谐振器来敏感角运动的装置称为谐振型光纤陀螺仪(RFOG);利用布里渊光纤环形激光器的频率变化原理构成的测角装置称为布里渊光纤陀螺仪(BFOG)。由于光学陀螺仪不象传统陀螺那样,依靠自转子的动量矩来敏感角运动。所以国外学术界也把这类陀螺定义为非陀螺仪角运动敏感器。 1.1光纤陀螺仪的特点 光纤陀螺仪作为一种新兴传感器件,具有许多深受欢迎的特点:(1)无运动部件,仪器牢固稳定,耐冲击和抗加速度运动;(2)结构简单,零部件少,价格低廉;(3)启动时间短(原理上可瞬间启动);(4)检测灵敏度和分辨率高(可达10 -7rad/s);(5)可直接用数字输出并与计算机接口联网;(6)动态范围极宽;(7)寿命长,信号稳定可靠;(8)易于采用集成光路技术;(9)克服了激光陀螺因闭锁现象带来的负效应。 光纤陀螺最大的特点是可根据不同的用途,选择不同的光纤长度和线圈直径及不同的信息处理方法,可覆盖陆地、航空、航天、航海等所有陀螺仪应用范围。与传统陀螺仪(液浮
陀螺仪的选择:其机械性能是最重要的参数 作者:ADI公司Harvey Weinberg 选择陀螺仪时,需要考虑将最大 误差源最小化。在大多数应用中,振动敏感度是最大的误差源。其它参数可以轻松地通过校准或求取多个传感器的平均值来改善。偏置稳定度是误差预算较小的分量之一。 浏览高性能陀螺仪数据手册时,多数系统设计师关注的第一个要素是偏置稳定度规格。毕竟,它描述的是陀螺仪的分辨率下限,理所当然是反映陀螺仪性能的最佳指标!然而,实际的陀螺仪会因为多种原因而出现误差,使得用户无法获得数据手册中宣称的高偏置稳定度。的确,可能只有在实验室内才能获得那么高的性能。传统方法是借助补偿来最大程度地降低这些误差源的影响。本文将讨论多种此类技术及其局限性。最后,我们将讨论另一种可选范式——根据机械性能选择陀螺仪,以及必要时如何提高其偏置稳定度。 环境误差 所有中低价位的MEMS陀螺仪都有一定的时间-零点偏置和比例因子误差,此外还会随温度而发生一定的变化。因此,对陀螺仪进行温度补偿是很常见的做法。一般而言,陀螺仪集成温度传感器的目的就在于此。温度传感器的绝对精度并不重要,重要的是可重复性以及温度传感器与陀螺仪实际温度的紧密耦合。现代陀螺仪的温度传感器几乎毫不费力就能达到这些要求。 许多技术可以用于温度补偿,如多项式曲线拟合、分段线性近似等。只要记录了足够数量的温度点,并且在校准过程中采取了充分的措施,那么具体使用何种技术是无关紧要的。例如,在每个温度的放置时间不足是一个常见的误差源。然而,无论采用何种技术,无论有多细心,温度迟滞——即通过冷却与通过加热达到某一特定温度时的输出之差——都将是限制因素。 图1所示为陀螺仪ADXRS453的温度迟滞环路。温度从+25℃变为+130℃,再变为–45℃,最后回到+25℃,与此同时记录未补偿陀螺仪的零点偏置测量结果。加热周期与冷却周期中的+25℃零点偏置输出存在细微的差异(本例中约为0.2°/s),这就是温度迟滞。此误差无法通过补偿来消除,因为无论陀螺仪上电与否,它都会出现。此外,迟滞的幅度与所施加的温度“激励”量成比例。也就是说,施加于器件的温度范围越宽,则迟滞越大。
第三节 陀螺经纬仪定向 将陀螺特性与地球自转有机结合构成的陀螺仪能够自动寻找真北方向,将这样的陀螺仪安装在经纬仪上,组成的陀螺经纬仪便可以测定真北方向在经纬仪水平度盘上的读数N ,从而可求出任一方向的真方位角。这一工作称为陀螺经纬仪定向观测,或陀螺经纬仪定向测量,或简称陀螺经纬仪定向 (gyro-theodolite orientation )。 如图3-1,C 、D 为地面上两点,在C 点上安置 陀螺经纬仪,测得真北方向在经纬仪水平度盘上的读数N ,D 方向在水平度盘上的读数为r CD ,则可求得 地理方位角 CD =r CD N (3-1) 和高斯平面直角坐标方位角 T CD =CD C (3-2) 其中C =(C L C )sin C C ,C 为天文经度,L C 为大地经度,C 为天文纬度,C 为C 处的子午线收敛角。 陀螺特性的发现与应用始于我国西汉末年,将陀螺技术应用于测北定向则是由于近代航海与采矿业发展的需要。法国人L. Foucault 1852年创造了第一台实验陀螺罗经;德国人H.Ansch ütz 制成第一台实用陀螺罗经样机;德国人M. Schuler 1908年首次制成单转子液浮陀螺罗经,用于军事和航海;在船用陀螺罗经的基础上,1949年德国Clausthal 矿业学院O.Rellensmann 研制出MW1型子午线指示仪,并于1958年研制出金属带悬挂陀螺灵敏部的KT-1陀螺经纬仪。此后的几十年间,世界各国先后开展了陀螺经纬仪的研制工作,相继生产出多种型号的产品。依仪器结构和发展阶段,可将各种陀螺经纬仪划分为液体漂浮式、下架悬挂式和上架悬挂式三种类型。液体漂浮式陀螺经纬仪的结构特点是将陀螺转子装在封闭的球形浮子中,采用液体漂浮电子磁定中心,陀螺转子由空气压缩涡轮机带动三相交流电机供电,全套仪器重达几百千克,一次定向需几小时,陀螺方位角一次测定中误差为1~2。这是陀螺经纬仪的早期型式。下架悬挂式陀螺经纬仪则是利用金属悬挂带把陀螺房悬挂在经纬仪空心轴下,悬挂带上端与经纬仪的壳体相固连;采用导流丝直接供电方式,附有携带式蓄电池组和晶体变流器。相对于液浮式,下架式陀螺经纬仪在定向精度、定向时间以及仪器的重量和体积上都产生了飞跃式改进。上架式陀螺经纬仪的结构特征是,用金属丝悬挂带把陀螺转子(装在陀螺房中)悬挂在灵敏部的顶端,灵敏部可稳定地联接在经纬仪横轴顶端的金属桥形支架上(该支架需预先制做、安装),不用时可取下,也就是说,灵敏部实际上相当于经纬仪的一个附件,这是仪器朝更方便使用的一种改进。本节以上架式陀螺经纬仪为例进行讨论。 C D N 真 北 ?C αCD T CD 图3-1 用陀螺经纬仪测量方位角
本文详细介绍了意法半导体公司的电容式微机械陀螺仪的基本工作原理,其采用对称双质量块结构,驱动质量块由静电力驱动产生可控的运动速度,而检测质量块则由哥氏力推动运动。振荡驱动电路采用了双闭环的控制结构,有效地减小了温度或其它缺陷对振幅的影响,显著提高了陀螺仪的分辨率和稳定性。最后,以单轴偏航陀螺仪LY530AL为例,详细介绍其关键参数及其应用,并配合三轴加速度传感器LIS3LV02DL,实现了新型无线遥控器和鼠标,验证了LY530AL的性能参数。 微机械陀螺仪 陀螺仪又称角速度计可以用来检测旋转的角速度和角度。正如我们所熟知,传统的机械式陀螺、精密光纤陀螺和激光陀螺等已经在航空、航天或其它军事领域得到了广泛地应用。然而,这些陀螺仪由于成本太高和体积太大而不适合应用于消费电子中。微机械陀螺仪由于内部无需集成旋转部件,而是通过一个由硅制成的振动的微机械部件来检测角速度,因此微机械陀螺仪非常容易小型化和批量生产,具有成本低和体积小等特点。近年来,微机械陀螺仪在很多应用中受到密切地关注,例如,陀螺仪配合微机械加速度传感器用于惯性导航、在数码相机中用于稳定图像、用于电脑的无线惯性鼠标等等[1]。 微机械工艺的发展和成熟,使得微机械陀螺仪在消费电子中的广泛应用成为可能,并且已有相应的产品面世,如罗技的空中鼠标。这些都使业界相信微机械陀螺仪很快就会成为继微机械加速计之后用于动作感测的另一重要元件。鉴于此,意法半导体公司基于其先进的Thelma工艺先后开发并量产了超小型单轴偏航陀螺仪LISY300AL和LY530AL。LY530AL具有两种接口:模拟和数字接口,提高了设计的灵活性,简化了设计难度,可测角速率达到±300度/秒。本文以LY530AL为例讨论意法半导体微机械陀螺仪的工作原理及其应用。
陀螺经纬仪观测方法研究与应用 【摘要】陀螺经纬仪(gyro theodolite)是带有陀螺仪装置、用于测定直线真方位角的经纬仪。其关键装置之一是陀螺仪,简称陀螺,又称回转仪。陀螺经纬仪的用途在于它能够确定真北方向(子午面)在水平度盘上的读数,在跟踪状态下即陀螺轴进动(摆动)中心所对应的水平度盘读数,求M的方式不同,确定了两大类陀螺经纬仪定向观测方法:跟踪式与不跟踪式。本文对观测精度进行分析后总结出观测方法、注意事项。 【关键词】陀螺经纬仪;观测方法;研究与应用 引言 陀螺经纬仪(见图1)主要由一个高速旋转的转子支承在一个或两个框架上而构成。具有一个框架的称二自由度陀螺仪;具有内外两个框架的称三自由度陀螺仪。经纬仪上安置悬挂式陀螺仪,是利用其具指北性确定真子午线北方向,再用经纬仪测定出真子午线北方向至待定方向所夹的水平角,即真方位角。指北性,是指悬挂式者在受重力作用和地球自转角速度影响下,陀螺轴将产生进动、逐渐向真子面靠拢,最终达到以真子面为对称中心,作角简谐运动的特性。确定真子午线北方向的常用方法,有中天法和逆转点法。 图1 陀螺经纬仪 目前主要应用于矿用巷道施工测量,以及盾构掘进中的水平及真北方向测量,可大大弥补导线过长所造成的精度损失。 1 陀螺经纬仪观测方法简介 1.1 逆转点法 逆转点法是一种最基本的陀螺定向方法。用逆转点法进行定向观测时,要求照准部处于跟踪状态,即在观测过程中使目镜分划板的零刻线始终与陀螺灵敏部的摆动光标相重合。当跟踪陀螺灵敏部到逆转点时,在经纬仪水平读盘上读数u1;跟踪到另一个逆转点时,在经纬仪水平读盘上读数u2。连续读取五个逆转点读数u1、u2、u3、u4、u5,取舒勒平均值计算结果。五个读数可以得到三个舒勒平均值N1、N2、N3: 则一次测定陀螺方位角的平均值为: N均=(N1+N2+N3)/3=(u1+3u2+4u3+3u4+u5)/12。 1.2 中天法
贯通:两个或两个以上的掘进工作面预定地点彼此接通的工程。 联系测量:为保证地下工程沿设计方向掘进,应通过平峒、斜井及竖井将地面坐标系统及高程系统传递到地下,该项工程叫联系测量。 自由陀螺仪在高速旋转时具有两个特性:定轴性和进动性。 竖井联系测量工作分为:平面联系测量、高程联系测量。 无定向导线:没有方向检核的导线及从一条已知边出发闭合到已知点上。伪距:由GPS观测而得的站星距离未对卫星钟差等加已改正故求得的距离并不是真正的站星距离所以称为伪距贯通工程包括三种情况:相向贯通、同向贯通、单向贯通。 详述陀螺经纬仪的作业过程。 (1在地面已知边上测定仪器常数。(2在井下定向边上测定陀螺方位角。(3仪器上井后重新测定仪器常数。(4求算子午线收敛角。(5求算井下定向边的坐标方位角。 某矿通过主、副井开拓,打了一对相距60米的800米立井现想将地面坐标高程系统统传递到井下试分析各种联系测量的方法的优缺点和应用条件。平面联系测量的方法主要有一井定向、两井定向和陀螺经纬仪定向。该矿原则上三种方法皆可,一井定向只需占用一个井筒,但精度低,作业方法复杂,在深井中投点困难。两井定向投点要求低,精度较高,但需占用两个井筒,且主副井之间需巷道相通。陀螺经纬仪定向精度高,时间短,基本不占用井筒,适合任意使用条件,但仪器价格昂贵。 导入高程可以使用:钢尺法、钢丝法和测距仪法。 地下工程对测量有哪些要求? 应严格按照先控制后碎步,高级控制低级,对测量成果步步检核,测量精度必须满足要求;应采取措施严格控制横向误差和纵向误差以保证工程质量;为保证地下工程的施工质量,在工程施工前,应进行工程测量误差预计;在地下工程中尽量采用先进的测量设备。 一井定向中连接三角形的最有利形状应满足什么条件? (1CD和CˊDˊ的长度应尽量大于20米;(2应使C和Cˊ点处的锐角γ及γˊ小于2°,构成最有利的延伸三角形;(3点C和Cˊ应适当的靠近最近的的垂球线,使a∕c和bˊ∕c之值尽量小一些,一般应小于1.5。 常用的地面控制网有哪些,各有和特点? 平面控制网:三角网、导线网、GPS 网。高程控制网:水准网三角高程网。三角网为传统方式,受仪器限制,主要测角,目前已淘汰;GPS网能通过全球定位系统,直接确定地点的GPS 控制点的三维坐标,是测区控制的首选;导线网一般用全站仪,做测区的加密控制。三角高程测量适用于高程起伏较大的山地,精度低;水准网适用于地势平坦的地区,精度高。 贯通测量设计书的内容包括哪些? 重要的贯通工程开始之前,应编制测量设计书,其主要任务是选择合理的测量方案和测量方法。 1井巷贯通工程概况;②贯通测量方案的选定;③贯通测量方法包括采用的仪器、测量方法及其限差规定;④贯通测量误差预计;⑤贯通测量中应注意的问题和应采取的相应措施 14、根据地下工程进峒方式的不同地下起始数据的传差可分为两种:横向贯通误差、纵向贯通误差。 15、GPS的点位应符合什么要求?(1应符合工程测量的需要和技术设计要求;(2应便于安置接受仪器和操作,周围视野开阔,便于布设通视方向,对天空通视情况良好,高度角15°以上不得有成片障碍物阻挡卫星信号;(3远离大功率无线电发射,其距离不宜小于200米,远离高压输电线,
三轴陀螺仪的原理和应用 三轴陀螺仪就是可以在同一时间内测量六个不同方向的加速、移动轨迹以及位置的测量装置。单轴的话,就只可以测定一个方向的量,那么一个三轴陀螺就可以代替三个单轴陀螺。它现在已经成为激光陀螺的发展趋向,具有可靠性很好、结构简单不复杂、重量很轻和体积很小等等特点。 很多加速度传感器和角速传感器只是很纯粹的传感器,不一定都是陀螺仪。导弹、轮船以及飞机里都安装有指示仪,定向指示仪是它们的核心部分。它是被安装在可以自由转动方向的框架比较小的飞轮中的,此装置里,由于轴承的摩擦力矩相对来说比较小,因此可以忽略掉。它的刚体结构是属于高度对称的,因此它的质心主要是在连杆中心的位置。如果飞轮绕着自己的对称轴作高速的转动的时候,框架的方向无论发生什么变化,它的中心轴空间的取向是不会发生任何变化的,这个特点是定向指示仪很重要的特征之一。 当给一架飞机安装三轴陀螺仪,同时让它的三个小飞轮的自转轴互相保持垂直的状态,那么根据飞轮轴相对机身的指定方向,驾驶员就可以确定好海伦的航行方向了。其实火箭以及鱼雷之中也安装了定向指示仪的,它有自动导航的功能。鱼雷前进的时候,定向指示仪轴线所指方向是不会发生变化的,当鱼雷受到风浪影响而导致前进的方向发生变化的时候,定向指示仪和鱼雷的纵轴之间就会出现一些偏差,这个时候可以通过启动有关器械来使舵的角度得到一定的改变,这样就可以让鱼雷保持原来的方向继续前进。而在火箭中,是通过使 喷气的方向得到一定的改变来改变飞行的方向。 陀螺仪可以比较准确地测量出运动物体的位置和方向,作为一种惯性的导航仪器,它广泛应用在国防、航天、航海以及航空领域中。它的发展对现代有很重要的意义,例如:高新科技、国防以及国家的工业等等。机械式的陀螺其实是传统的惯性陀螺,它的结构很复杂,因此它对工艺上的结构要求是非常严格的,很多因素都会影响它的测量精度。现代陀螺仪的发展已经越来越快了,技术也越来越成熟,已经成功进入到全新的阶段中。发展最快的当属光纤陀螺仪,它的工作很可靠、灵敏度很高以
陀螺仪的原理 陀螺仪简介 绕一个支点高速转动的刚体称为陀螺(top)。通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。由苍蝇后翅(特化为平衡棒)仿生得来。 在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopic effect)。陀螺旋进是日常生活中常见的现象,许多人小时候都玩过的陀螺就是一例。
陀螺仪的原理 我们不用一个完整的轮框,我们用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。轴的底部被托住静止但是能够各个方向旋转。当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如其中的子图1。因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。CD两个质点的情况也是一样的。子图2中质点A 当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。AC质点的组合将导致轴在子图2所示的运动平面内运动。一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。C质点的向下运动现在受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。 万向节陀螺仪 实际上,轴在这个情况下将会在倾斜力的平面上旋转。轴之所以会旋转是因为质点AC在向上和向下运动的一些能量用尽导致轴在运动平面内运动。当质点AC最后旋转到大致上相反的位置上时,倾斜力比向上和向下的阻碍运动的力要大。
班级
姓名
学号
提交日期 2010/5/26
陀螺仪的原理及其应用
XXX
(常州工学院机械设计及其自动化系,江苏,常州,212300) 摘要 综述了陀螺仪对现代国防和科技的重要作用。主要阐述了陀螺仪的发展现状 和未来前景。说明了陀螺仪的各项基本特征、应用原理。也说明了现代陀螺仪的应用 范围及其功能分类。 关键词 基本特征 应用原理 功能分类 Abstract Reviews of national defence and science and technology gyroscope. Mainly expounds the development situation and future gyroscope. The gyroscope illustrates the basic characteristics, application principle. Also explains the application of modern gyroscope and functions. Keywords The basic principle characteristics application functions
0
引言
陀螺仪可算是非常复杂的物体,精度要求也相当高。因为它们以独特的方式运动,甚至 像在抵抗重力。 正是这些特殊属性使其在各个方面 (包括自行车和宇宙飞船上的先进导航系 统)都有极为重要的用途。一般的飞机要用约 10 多个陀螺仪,遍布在罗盘和自动驾驶仪等 各个地方。俄罗斯米尔空间站曾使用 11 个陀螺仪保持其方向对准太阳。哈勃太空望远镜也 安装了大量导航陀螺仪。同样,陀螺效应对溜溜球和飞盘等玩具也至关重要。
1
陀螺仪的原理特性
1.1 陀螺仪的特性 1 进 动 性 陀螺能在细线或手指上保持平衡; 能以非常奇妙的方式抵制自转轴运动; 但最有趣的陀 螺效应还数进动。这是陀螺仪抵抗重力的表现。 根据这一原理,回转的自行车轮能够像下 图所那样选在空中:
陀螺仪“抵抗重力”的能力
第1页
实验五陀螺经纬仪认识及使用 一、实验目的: 1、了解陀螺经纬仪的结构及安置方法; 2、掌握逆转点法、中天法观测陀螺北方向的观测方法。 二、仪器准备: 1、JT15型陀螺仪1台、配套电源; 2、配套经纬仪1台、脚架1个; 3、罗盘、跑表各1只。 三、实验步骤: 1、仪器安置与连接 ①正确安置仪器,经纬仪严格整平,对中,稳定。 ②正确与陀螺经纬仪连接(经纬仪位于盘左位置)。 ③将电源线连接好,注意拔插方法。 ④将经纬仪大致指向北方向。(必要时用已知边或罗盘确定) 2、仪器启动与关断 ①打开照明开关,观察视窗光标情况。 ②打开启动开关,陀螺转子启动,待4-5分钟,转子达到额定转速(声音稳定下来)。 ③打开锁紧装置(同时左手紧握托放螺旋,使不要转动)。慢慢下放陀螺,使陀螺灵 敏部缓缓下放。操作者同时在目镜镜中观察,当手轮到达某一位置后,手上有定位感觉,此为半脱位置,光标象开始晃动起来,此时应稍停几秒钟,观察光标移动情况,注意限幅(限幅时使光标与零刻划线一致,慢慢托起,再慢慢放下)至到将陀螺房下放到位。 ④观测时注意跟踪过程中保持仪器稳定、平稳。操作用力均匀平稳。 ⑤观测完毕,先将陀螺房慢慢托起(注意托起过程中光标与零刻划线要重合。托起 位置正确时锁紧装置应能够正确插入小孔)。 ⑥按下制动开关,将陀螺制动,再按下关断开关,关掉电源,待陀螺静止后拆卸仪 器。 3、陀螺北方向观测 逆转点法: ①严格整置经纬仪,以一个测回测定待定和已知测线的方向值,然后将仪器大 致对正北方。 ②锁紧摆动系统,启动陀螺马达,待达到额定转速后,下放陀螺灵敏部,进行 粗略定向,再制动陀螺并托起锁紧,将望远镜视准轴转到近似北方位置,固 定照准部,把水平微动螺旋调到行程中间位置。 ③打开陀螺照明,下放陀螺灵敏部,进行测前悬带零位观测,同时用秒表记录 自摆周期。零位观测完毕,托起并锁紧灵敏部。 ④启动陀螺马达,达到额定转速后,慢慢下放灵敏部到半脱离位置,稍停数秒, 再全部下放。用水平微动螺旋微动照准部,让光标像与分划板零刻划线随时 重合,在摆动到逆转点时,连续读取5个逆转点读数。然后锁紧灵敏部,制 动陀螺马达。 ⑤进行测后零位观测 ⑥以一个测回测定待定和已知测线的方向值 中天法: 和逆转点法一样进行粗略定向和零位测定,启动陀螺马达,到达额定转速后下放灵敏部,经限幅,使光标像摆幅不超过目镜视场。然后按下列顺序观测:、 ①灵敏部指标线经过分划板零刻划线时启动专用秒表,读取中天时间
陀螺仪传感器和加速度传感器的区别和相关应用 对于不熟悉这类产品的人来说,陀螺仪传感器是一个简单易用的基于自由空间移动和手势的定位和控制系统。在假想的平面上挥动鼠标,屏幕上的光标就会跟着移动,并可以绕着链接画圈和点击按键。当你正在演讲或离开桌子时,这些操作都能够很方便地实现。陀螺仪传感器原本是运用到直升机模型上的,已经被广泛运用于手机这类移动便携设备上(IPHONE的三轴陀螺仪技术)。 陀螺仪的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。我们骑自行车其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。现代陀螺仪可以精确地确定运动物体的方位的仪器,它在现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器。传统的惯性陀螺仪主要部分有机械式的陀螺仪,而机械式的陀螺仪对工艺结构的要求很高。70年代提出了现代光纤陀螺仪的基本设想,到八十年代以后,光纤陀螺仪就得到了非常迅速的发展,激光谐振陀螺仪也有了很大的发展。光纤陀螺仪具有结构紧凑,灵敏度高,工作可靠。光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。光纤陀螺仪同时发展的除了环式激光陀螺仪外。 陀螺仪传感器应用 1、国防工业 陀螺仪传感器原本是运用到直升机模型上的,而它现在已经被广泛运用于手机这类移动便携设备上,不仅仅如此现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,所以陀螺仪传感器是现代航空,航海,航天和国防工业应用中的必不可少的控制装置。陀螺仪传感器是法国的物理学家莱昂傅科在研究地球自转时命名的,到如今一直是航空和航海上航行姿态及速率等最方便实用的参考仪表。 2、开门报警器