系统辨识与自适应控制课件
- 格式:pdf
- 大小:159.34 KB
- 文档页数:16
系统辩识与自适应控制教材(电子版)第一章系统辩识引论§1—1系统辨识的基本概念(要求:掌握什么是系统系统辨识、定义、主要步骤,对系统辨识有比较全面的初步了解)一、什么是系统辨识System Identification系统辩识,又译为“系统识别”和“系统同定”,目前尚无公认的统一定义。
《中国大百科全书》中记述为:系统辩识是根据系统的输入/输出时间函数,确定系统行为的数学模型,是现代控制理论的一个分支(中国大百科自动控制卷486-488页)。
通俗地说,系统辩识是研究怎样利用对未知系统的试验数据或在线运行数据(输入/输出数据)建立描述系统的数学模型的科学。
钱学森把系统广义概括为“依一定顺序相互联系着的一组事物”。
“系统辩识”是“系统分析”和“控制系统设计”的逆问题。
基于实际系统的复杂性,描述其特性的数学模型具有“近似性”和“非唯一性”;辩识方法亦有多样性。
没有绝对好的数学模型和绝对好的辩识方法。
什么是较好的模型?依据辩识的不同目的,有不同答案。
一般说,能够满足目的要求的,比较简单的模型,是较好的模型。
二、系统辩识的目的通常有四类:1.为了估计具有特定物理意义的参数(如:时间常数;转动惯量;经济、生物、生态系统的参数);2.为了预测(如:气象、大气污染、市场、故障等);3.为了仿真(“性能仿真”与“过程仿真”对模型的要求不同);4.为了控制(如设计控制系统的需要)。
三、统辩识的基本步骤系统辩识包括结构辩识和参数估计两个主要内容。
辩识的内容和一般步骤如下:(1)明确目的和获取先验知识首先要尽可能多的获取关于辨识对象的先验知识和明确辩识的目的。
明确目的和掌握尽可能多的先验知识往往是辨识结果好坏的重要先决条件。
(2)实验设计(§3—3)实验设计主要包括以下六个方面内容:a)选择观测点;b)输入信号的形状和幅度(可持续激励条件);c)采样间隔T0;d)开环和闭环辩识(§3—2闭环可辩识条件);e)在线和离线辩识;f) 测量数据的存储和预处理。

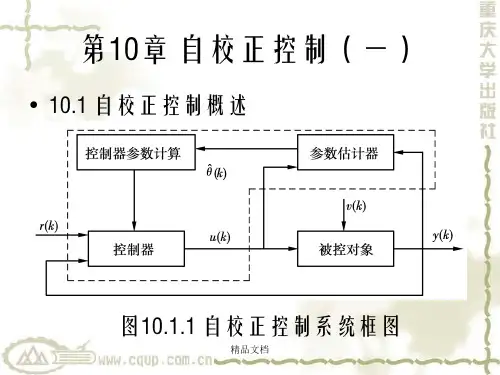
控制系统中的系统辨识与自适应控制在控制系统中,系统辨识与自适应控制是两个关键的方面。
系统辨识是指通过实验或推理的方法,从输入和输出的数据中提取模型的参数和结构信息,以便更好地理解和控制系统的行为。
而自适应控制是指根据系统辨识得到的模型参数和结构信息,实时地调整控制器的参数以适应系统变化,以提高控制性能。
一、系统辨识1.1 参数辨识参数辨识是指确定系统动态模型中的参数。
常用的方法包括最小二乘法、极大似然估计法等。
最小二乘法是一种常见的参数辨识方法,通过最小化实际输出与模型输出之间的误差平方和来确定参数。
1.2 结构辨识结构辨识是指确定系统动态模型的结构,包括确定系统的阶数、输入输出关系等。
常用的结构辨识方法有ARX模型、ARMA模型等。
ARX模型是指自回归外部输入模型,适用于输入输出具有线性关系的系统。
ARMA模型是指自回归滑动平均模型,适用于输入输出关系存在滞后效应的系统。
二、自适应控制自适应控制是根据系统辨识得到的模型参数和结构信息,动态地调整控制器的参数以适应系统的变化。
常用的自适应控制方法有模型参考自适应控制、模型预测控制等。
2.1 模型参考自适应控制模型参考自适应控制是建立在系统辨识模型基础上的控制方法。
通过将系统输出与参考模型输出进行比较,通过调整控制器参数来减小误差。
常见的模型参考自适应控制方法有自适应PID控制、自适应模糊控制等。
2.2 模型预测控制模型预测控制是一种基于系统辨识模型的控制策略,通过对系统未来的状态进行预测,以求得最优控制输入。
模型预测控制可以同时考虑系统的多个输入和多个输出,具有较好的控制性能。
三、应用案例3.1 机械控制系统在机械控制系统中,系统辨识和自适应控制可以被应用于伺服控制系统。
通过系统辨识可以得到伺服电机的动态模型,然后利用自适应控制方法调整PID控制器的参数,以提高伺服系统的响应速度和稳定性。
3.2 化工控制系统在化工控制系统中,系统辨识和自适应控制可以被应用于控制某个反应器的温度。