非线性系统的鲁棒自适应控制 Robust Adaptive Control of Uncertain Nonlinear Systems 郝仁剑3120120359 摘要:本文以非线性系统的控制问题为背景,介绍了多种经典的非线性系统的控制方法以及研究进展,分析了各种控制方法存在的优点和不足。着重介绍了鲁棒自适应控制在非线性系统中的应用,结合该领域的近期研究进展和实际应用背景,给出对鲁棒自适应控制的进一步研究目标。 关键词:非线性系统鲁棒控制自适应控制 1.前言 任何实际系统都具有非线性特性,非线性现象无处不在。严格地说,线性特性只是其中的特例,但是非线性系统与线性系统又具有本质的区别。由于非线性系统不满足叠加原理,因此非线性特性千差万别,这也给非线性系统的研究带来了很大的困难。同时,对于非线性系统很难求得完整的解,一般只能对非线性系统的运动情况做出估计。众所周知,控制理论经历了经典控制理论和现代控制理论两个发展阶段。在第二次世界大战前后发展起来的经典控制理论应用拉普拉斯变换等工程数学工具来分析系统的品质。它广泛地应用于单输入单输出、线性、定常、集中参数系统的研究中。随着控制对象的日益复杂以及人们对控制系统精度的不断提高,经典控制理论的局限性就暴露出来了。在20世纪50年代,Bellman根据最优原理创立了动态规划。同时庞特里亚金等学者创立了最大值原理。后来,Kalman提出了一系列重要的概念,如可观性,可控性,最优线性二次状态反馈,Kalman滤波等。这些理论和概念的提出大大促进了现代控制理论的发展。控制系统的设计都需要以被控对象的数学模型为依据,然而对于任何被控对象不可能得到其精确的数学模型,如在建立机器人的数学模型时,需要做一些合理的假设,而忽略一些不确定因数。不确定性的必然存在也正促使了现代控制理论中另一重要的研究领域——鲁棒控制理论的发展。Zmaes关于小增益定理的研究以及Kalman关于单输入单输出系统LQ调节器稳定裕量的分析为鲁棒控制理论的发展产生了重要的影响。特别是Zmaes1981年发表的论文[1]标志H∞控制理论的起步。1984年Francis和Zmaes基于古典插值理论提出H∞问题的初步解法。Glover运用Hankel算子理论给出了H∞问题的解析解。Doyle在状态空间上对Glover解法进行整理和归纳。至此H∞控制理论体系初步形成。同时,Doyle首次提出结构化奇异值的概念,后来形成了μ解析理论。另外一种重要的控制器设计方法是基于Lyapunov函数的方法。在进行鲁棒控制器的设计时,一般都假设系统的不确定性属于一个可描述集,比如增益有界,且上界己知等。一般来说,鲁棒控制是比较保守的控制策略。对所考虑集合内的个别元素,该系统并不是最佳控制。对于具有参数不确定性的一类系统,自适应控制技术被提了出来,如模型参考自适应控制和自校正控制等。在实际应用中,由于被控对象具有未建模动态,过程噪声或扰动的统计特性远比设计时所设想的情况更复杂,以及持续激励条件和严正实条件等“理想条件”被打破,这都会导致自适应控制算法的失稳。于是自适应控制的鲁棒性课题,即鲁棒自适应控制受到了广泛的关注。大量的工程实践表明,对于复杂的工业对象和过程,引入自适应策略能够提高控制精度,提高生产效率,降低成本。近年来,非线性自适应控制技术取得突破性的发展,控制器的结构化设计技术也正日益得到广泛的研究与应用。
10.自适应控制 严格地说,实际过程中的控制对象自身及能所处的环境都是十分复杂的,其参数会由于种种外部与内部的原因而发生变化。如,化学反应过程中的参数随环境温度和湿度的变化而变化(外部原因),化学反应速度随催化剂活性的衰减而变慢(内部原因),等等。如果实际控制对象客观存在着较强的不确定,那么,前面所述的一些基于确定性模型参数来设计控制系统的方法是不适用的。 所谓自适应控制是对于系统无法预知的变化,能自动地不断使系统保持所希望的状态。因此,一个自适应控制系统,应能在其运行过程中,通过不断地测取系统的输入、状态、输出或性能参数,逐渐地了解和掌握对象,然后根据所获得的过程信息,按一定的设计方法,作出控制决策去修正控制器的结构,参数或控制作用,以便在某种意义下,使控制效果达到最优或近似更优。目前比较成熟的自适应控制可分为两大类:模型参考自适应控制(Model Reference Adaptive Control)和自校正控制(Self-Turning)。 10.1模型参考自适应控制 10.1.1模型参考自适应控制原理 模型参考自适应控制系统的基本结构与图10.1所示: 10.1模型参考自适应控制系统 它由两个环路组成,由控制器和受控对象组成内环,这一部分称之为可调系统,由参考模型和自适应机构组成外环。实际上,该系统是在常规的反馈控制回路上再附加一个参考模型和控制器参数的自动调节回路而形成。
在该系统中,参考模型的输出或状态相当于给定一个动态性能指标,(通常,参考模型是一个响应比较好的模型),目标信号同时加在可调系统与参考模型上,通过比较受控对象与参考模型的输出或状态来得到两者之间的误差信息,按照一定的规律(自适应律)来修正控制器的参数(参数自适应)或产生一个辅助输入信号(信号综合自适应),从而使受控制对象的输出尽可能地跟随参考模型的输出。 在这个系统,当受控制对象由于外界或自身的原因系统的特性发生变化时,将导致受控对象输出与参考模型输出间误差的增大。于是,系统的自适应机构再次发生作用调整控制器的参数,使得受控对象的输出再一次趋近于参考模型的输出(即与理想的希望输出相一致)。这就是参考模型自适应控制的基本工作原理。 模型参考自适应控制设计的核心问题是怎样决定和综合自适应律,有两类方法,一类为参数最优化方法,即利用优化方法寻找一组控制器的最优参数,使与系统有关的某个评价目标,如:J=? t o e 2(t)dt ,达到最小。另一类方法是基于稳 定性理论的方法,其基本思想是保证控制器参数自适应调节过程是稳定的。如基于Lyapunov 稳定性理论的设计方法和基于Popov 超稳定理论的方法。 系统设计举例 以下通过一个设计举例说明参数最优化设计方法的具体应用。 例10.1设一受控系统的开环传递函数为W a (s)=) 1(+s s k ,其中K 可变,要求 用一参考模型自适应控制使系统得到较好的输出。 解:对于该系统,我们选其控制器为PID 控制器,而PID 控制器的参数由自适应机构来调节,参考模型选性能综合指标良好的一个二阶系统: W m (d)= 1 414.11 2 ++s s 自适应津决定的评价函数取 minJ =?t e 2 (t)dt ,e(t)为参考模型输出与对象输出的误差。 由于评价函数不能写成PID 参数的解析函数形式,因此选用单纯形法做为寻优方法。(参见有关优化设计参考文献)。 在上述分析及考虑下,可将系统表示具体结构表示如下图10.2所示。
无模型自适应(MFA)控制 无模型自适应控制的概念和意义 无模型自适应控制系统应具有如下属性或特征: ? 无需过程的精确的定量知识; ?系统中不含过程辨识机制和辨识器; ?不需要针对某一过程进行控制器设计; ? 不需要复杂的人工控制器参数整定; ? 具有闭环系统稳定性分析和判据,确保系统的稳定性。 下面结合燃烧过程的控制详细讨论以下五个问题,阐述无模型自适应控制理论的精髓: 过程知识 大多数先进控制技术都需要对过程及其环境有较深的了解,一般用拉普拉斯变换或动态微分方程来描述过程动态特性。然而在过程控制领域,许多系统过于复杂,或者其内在规律难以了解,因此很难得到过程的定量知识,这通常称为“黑箱”问题。 在许多情况下,我们可能掌握了一些过程知识但是不知道这些知识是否精确。在包括燃烧控制的过程控制中,经常碰到进料的波动,燃料类型和热值的改变,下游需求不可预测的变化以及产品尺寸、配方、批次和负荷等频繁的切换。这些就导致一个问题:即无法确定所掌握的过程知识的精确程度。这种现象通常被叫做“灰箱”问题。 如果能掌握过程的大量知识,那就是一个“白箱”问题。在这种情况下,基于对过程的了解,利用成熟的控制方法及工具设计控制器就容易多了。 尽管无模型自适应控制器可以解决黑箱、灰箱和白箱问题,但更适用于灰箱问题,事实上大多数工业过程都是灰箱问题。 过程辨识 对于传统的自适应控制方法,如果不能获得过程的定量信息,一般需要采用某种辨识机制,以在线或离线的方式获得系统的动态特性。由此产成了以下一些难以解决的问题: ? 需要离线学习; ?辨识所需的不断的激励信号与系统平稳运行的矛盾; ?模型收敛和局部最小值问题; ? 系统稳定性问题。 基于辨识的控制方法不适用于过程控制的主要原因是控制和辨识是一对矛盾体。好的控制使系统处于一个稳定状态,这种情况下设定值(SP)、控制器输出(OP)和过程变量(PV)在趋势图中显示出来的都是直线。任何稳定系统都会达到另一个稳定状态,而其中的过程动态特性的变化却不能被察觉,因此通常需要施加激励信号来进行有效的过程辨识。然而,实际生产过程很难容许这样做。 MFA控制系统中没有辨识环节因此可以避免上述问题。一旦运行,MFA控制器就可立刻接管控制。MFA控制器中
无模型自适应控制方法的应用研究 XXX (北京化工大学自动化系,北京100029) 摘要:概述了一种新型的控制方法无模型自适应控制。目的是对当前无模型自 适应控制有一个总体的认识, 它是一种无需建立过程模型的自适应控制方法。与传统的基于模型的控制方法相比,无模型控制既不是基于模型也不是基于规则,它是一种基于信息的控制方法。无模型控制器作为一种先进的控制策略,具有很强的参数自适应性和结构自适应性。基于以上背景,首先介绍了无模型自适应控制的性质及特征,结合对北京化工大学405仿真实验室三级液位控制系统的仿真研究,并将其与PID控制器的效果进行了对比。仿真表明, 无模型控制器具有良好的抗干扰能力、参数自适应性和结构自适应性。 关键字:无模型;自适应;控制; Model Free Adaptive Control Theory and its Applications XXX (Department of Automation, Beijing University of Chemical Technology Beijing 100029) Abstract: A new kind of control method model-free adaptive control is given. The purpose is to make MFA to be understood. Model free adaptive control(MFAC)theory is an adaptive control method which does not need to model the industrial process.Compared with traditional control methods based on modeling,MFAC is an advanced control strategy which based on information of Input/Output Data.It has parameter adaptability and structure adaptability.Based on the background,First the property and character of MFA are introduced, Then Combining 405 Simulation Laboratory of Beijing University of Chemical technology three- level control system simulation.The simulation results show that MFAC controller has excellent robustness,anti-jamming capability, parameter and structure adaptability.
自适应PID控制 摘要:自适应PID控制是一门发展得十分活跃控制理论与技术,是自适应控制理论的一个重要组成部分,本文简要回顾PID控制器的发展历程,对自适应PID控制的主要分支进行归类,介绍和评述了一些有代表性的算法。 关键词:PID控制,自适应,模糊控制,遗传算法。 Abstract: The adaptive PID control is a very active developed control theory and technology and is an important part of adaptive control theory.This paper briefly reviews the development process PID controller.For adaptive PID control of the main branches, the paper classifies,introduces and reviews some representative algorithms. Keywords: PID control, adaptive, fuzzy control, genetic algorithm 1 引言 从问世至今已历经半个世纪的PID控制器广泛地应用于冶金、机械、化工、热工、轻工、电化等工业过程控制之中,PID控制也是迄今为止最通用的控制方法, PID控制是最早发展起来的控制策略之一,因为他所涉及的设计算法和控制结构都很简单,并且十分适用于工程应用背景,所以工业界实际应用中PID 控制器是应用最广泛的一种控制策略(至今在全世界过程控制中用的80% 以上仍是纯PID调节器,若改进型包含在内则超过90%)。由于实际工业生产过程往往具有非线性和时变不确定性,应用常规PID控制器不能达到理想控制效果,长期以来人们一直寻求PID控制器参数的自动整定技术,以适应复杂的工况和高指标的控制要求。随着微机处理技术和现代控制理论诸如自适应控制、最优控制、预测控制、鲁棒控制、智能控制等控制策略引入到PID控制中,出现了许多新型PID控制器。人们把专家系统、模糊控制、神经网络等理论整合到PID控制器中,这样既保持了PID控制器的结构简单、适用性强和整定方便等优点,又通过先进控制技术在线调整PID控制器的参数,以适应被控对象特性的变化。 2 自适应PID控制概念及发展 2.1 PID控制器 常规PID控制系统原理框图如下图所示,系统由模拟PID控制器和被控对象组成。
第九章 模型参考自适应控制(Model Reference Adaptive Control )简称MRAC 介绍另一类比较成功的自适应控制系统,已有较完整的设计理论和丰富的应用成果(驾驶仪、航天、电传动、核反应堆等等)。 §9 —1MRAC 的基本概念 系统包含一个参考模型,模型动态表征了对系统动态性能的理想要求,MRAC 力求使被控系统的动态响应与模型的响应相一致。与STR 不同之处是MRAC 没有明显的辨识部分,而是通过与参考模型的比较,察觉被控对象特性的变化,具有跟踪迅速的突出优点。 设参考模型的方程为 式(9-1-1) 式(9-1-2) 被控系统的方程为 式(9-1-3) 式(9-1-4) 两者动态响应的比较结果称为广义误差,定义输出广义误差为 e = y m – y s 式(9-1-5); X A X Br y CX m m m m m ? =+= X A B r y CX S S S S S ? =+=
状态广义误差为 ε = X m – X s 式(9-1-6)。 自适应控制的目标是使得某个与广义误差有关的自适应控制性能指标J 达到最小。J 可有不同的定义,例如单输出系统的 式 (9-1-7) 或多输出系统的 式(9-1-8) MRAC 的设计方法目的是得出自适应控制率,即沟通广义误差与被控系统可调参数间关系的算式。有两类设计方法:一类是“局部参数最优化设计方法”,目标是使得性能指标J 达到最优化;另一类是使得自适应控制系统能够确保稳定工作,称之为“稳定性理论的设计方法。 §9 —2 局部参数最优化的设计方法 一、利用梯度法的局部参数最优化的设计方法 这里要用到非线性规划最优化算法中的一种最简单的方法—— J e d t = ?20 ()ττ J e e d T t = ?()()τττ
自适应控制器的实际应用 一、概述 近20年来,系统辨识和参数估计理论获得了迅速的发展,已经成为自动控制理论的一个十分活跃而又重要的分支。这是由于系统辨识和参数估计是建立被控系统数学模型的重要途径之一,许多问题在做出决策之前都需要寻找描述该问题的数学模型,因而,模型化方法是进行系统分析、设计、预测、控制、决策的前提和基础,形成了与辨识技术紧密结合的综合新技术--如自适应控制、自适应预报、自适应滤波、自适应信号处理等。 随着控制理论的发展与应用面的扩大,系统辨识出自身发展之外,与其他技术的联系也更加紧密,如与模糊方法的结合形成的模糊自适应;与神经网络技术相结合形成的神经网络自适应;与人工智能技术相结合形成的智能自适应技术;与故障诊断技术相结合形成的自适应故障诊断技术等。 为了加深对系统辨识的认识,我从实际的角度,选取了四个不同类型的自适应技术,进行了解和分析,力求做到学以致用。 二、模糊自适应控制器的实际应用 模糊自适应控制理论是模糊控制理论与自适应控制理论相互交叉、相互渗透而形成的一个研究领域。模糊控制理论的特点是运用模糊集合理论,总体考虑系统因素,协调控制作用的一种控制方法。它的方
法是用模糊控制命题表示一组控制规律,将指标函数与控制量联系起来,经模糊推理决定控制量,而不管系统本身的内在因素。因而模糊控制是处理控制系统不确定性的一种有效方法。 这里我选用的是水温的模糊自适应控制器的设计。 模糊控制器的设计:1.确定模糊控制器的输入变量和输出变量:温度误差和温度误差的变化量作为输入量,以提前打开电加热的时间为输出变量; 2.确定模糊集的隶属函数和模糊控制器控制规则:a.输入和输出变量的词集:①中文:{负大,负中,负小,零,正小,正中,正大} 英文:{NB,NM,NS,Z,PS,PM,PB};b.定义各模糊变量的模糊 子:F(x)=exp[-( σa x-)2](其中a为正态形隶属函数的中心,参数σ的大小直接影响隶属函数的形状,而隶属函数的开关不同会导致不同的控制特性);c:建立模糊控制器的控制规则: 3.确立模糊化和非模糊化(又称清晰化)的方法:如果精确量x的实
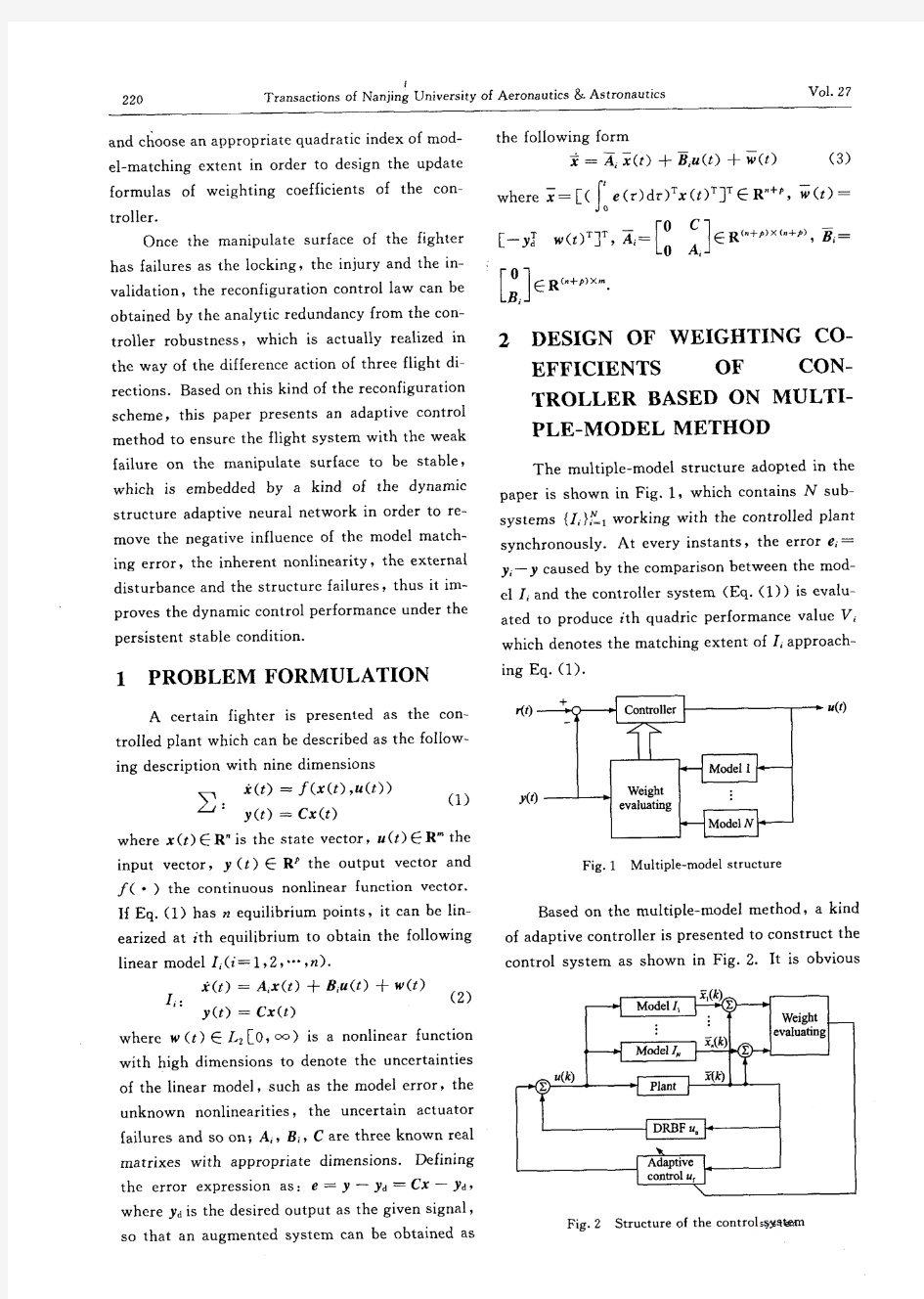
多模型自适应控制方法的研究 王昕李少远 (上海交通大学自动化研究所上海200030) wangxin26@https://www.doczj.com/doc/9213886743.html, 摘要:本文针对多模型自适应控制方法进行了详尽的分析和论述,包括间接多模型,直接多模型和加权多模型自适应控制,同时介绍了多模型自适应控制在工业中的应用实例,最后对多模型自适应控制的发展进行了展望。 关键词:多模型控制,自适应控制,工业应用 Research on Multiple Models Adaptive Control Xin Wang Shaoyuan Li (Institute of Automation, Shanghai Jiaotong University, Shanghai 200030) wangxin26@https://www.doczj.com/doc/9213886743.html, Abstract: Multiple models adaptive control (MMAC) algorithms are discussed in this paper, including indirect multiple models adaptive control algorithm, direct multiple models adaptive control algorithm and weighted multiple models adaptive control algorithm. The applications of multiple models adaptive control to industrial process are introduced. Finally, the future tendency of MMAC is pointed out. Keyword: Multiple models control, Adaptive control, Industrial application 1 引言 对于复杂的工业过程,当被控系统模型参数未知或发生缓慢时变时,可以采用常规自适应方法进行控制器设计[1-3]。所谓常规自适应控制方法,就是将控制器的设计和模型的辨识有机地结合起来,在对被控系统进行辨识的基础上实时调节控制器参数以尽可能地降低模型不确定性带来的影响,使得控制系统拥有一定程度的适应能力。而适应能力的好坏,除了取决于控制器的设计方法外,还取决于辨识算法的收敛速度。当辨识算法的参数初值选择得距离参数真值很近时,可以得到令人满意的控制效果。但在复杂工业过程中,边界条件改变、子系统故障、外界干扰等多种因素常常导致被控系统从一个工作点变到另一个工作点,这时,系统参数往往发生大范围跳变,导致辨识算法的收敛速度减慢,无法得到令人满意的控制效果。为了解决上述问题,可以采用多模型自适应控制方法设计控制器进行控制。 多模型控制的思想可以追溯到七十年代。从1971年https://www.doczj.com/doc/9213886743.html,iniotis提出的基于后验概率加权的多模型控制器[4-6],到目前基于切换指标的多模型自适应控制器[7-10],已经经历了三十多年的发展。近几年来在多模型集的建立、模型集的优化、多模型控制器的结构和设计以及闭环系统的稳定性、全局收敛性等方面的研究,取得了大量的成果,分别在IEEE Transactions on Automatic Control,Automatica,International Journal of System Science,System & Control Letters 等国际杂志和IFAC,CDC,ACC等国际会议上发表了大量文章。特别是1999年International Journal of Control将7、8、两期合刊出版了多模型控制专刊以及专著《Multiple Model Approaches to Modeling and Control》[11]的出版,极大地推动了多模型控制的发展,使之成为自适应控制的最新研究方向之一[12]。 2 多模型自适应控制器设计 多模型自适应控制器采用多个不同模型构成模型集覆盖系统参数变化的可能范围,针对每一个模型分别设计控制器,然后依据一定的切换准则选择最优控制器进行控制。多模型自适应控制方法按照控制器的选取方式不同,可以分为三种方式,下面分别予以介绍: 2.1 间接多模型自适应控制方法 间接多模型自适应控制方法首先采用多个不同的模型构成多模型集覆盖系统参数变化
控制工程C ontrol Engineering of China May 2007V ol.14,N o.3 2007年5月第14卷第3期 文章编号:167127848(2007)0320290204 收稿日期:2006203216; 收修定稿日期:2006204226 基金项目:国家自然科学基金资助项目(60304012) 作者简介:李宁宁(19762),女,湖南长沙人,研究生,主要研究方向为智能控制、自适应控制等;宋 苏(19632),男,博士,教授。 一种鲁棒神经网络自适应控制策略及其应用 李宁宁1 ,宋 苏 2 (11北京工业大学人工智能与机器人研究所,北京100022;21国家自然科学基金委员会信息学部,北京100085 ) 摘 要:针对具有外部干扰等不确定因素的离散未知非线性受控对象,提出了一种鲁棒 神经网络自适应控制策略。该策略运用自适应预测及带遗忘因子的递推最小二乘参数估计的思想,对神经网络的预报输出进行修正,利用鲁棒反馈控制器保证系统稳定性,并对控制信号的增量进行限幅以抑制突变大幅值干扰信号对系统的影响。将提出的控制方法应用于实验室级液面系统的仿真中,结果表明了该控制策略的有效性。关 键 词:神经网络;模型参考自适应控制;自适应预测;液面系统中图分类号:TP 273 文献标识码:A R obust Neural Netw ork Adaptive C ontrol Scheme and Its Application LI Ning 2ning 1 ,SONG Su 2 (1.Institute of Artificial Intelligence and R obotics ,Beijing University of T echnology ,Beijing 100022,China ;2.Department of In formation Sciences ,National Natural Science F oundation of China ,Beijing 100085,China ) Abstract :A robust adaptive control based on neural netw ork for unknown nonlinear dynamical systems with bounded disturbances or unm odeled dynamics is proposed.I t is realized using adaptive forecasting and the recursive forgetting factor least square method.The stability of system is guaranteed by a robust controller.The increment of control signal is restricted in a proper range.This scheme is applied to a laboratory 2scale liquid 2level system ,and the results of simulation show the effectiveness of the proposed scheme.K ey w ords :neural netw ork ;m odel reference adaptive control ;adaptive forecasting ;liquid 2level system 1 引 言 近年来,由于神经网络所具有的良好的非线性 映射能力、自学习适应能力和并行信息处理能力等,为解决复杂非线性系统的建模和控制等问题提供了很好的思路。然而,神经网络控制在实际中的应用大大受阻,原因之一是在实际的工业控制中,大量的干扰等不确定因素广泛存在,使系统的控制效果等受到影响,甚至失去稳定性。因此,提高神经网络控制系统的鲁棒性变得十分重要,而目前在此领域的研究成果还比较少见。 本文基于神经网络模型参考自适应控制,提出了一种鲁棒神经网络自适应控制策略。 2 鲁棒神经网络自适应控制策略的设计 考虑到实际的受控对象多为具有不确定因素的 未知非线性系统,本文以间接型神经网络模型参考自适应控制为基础,提出了一种鲁棒神经网络自适应控制策略,其控制结构如图1所示 。 图1 提出的鲁棒神经网络自适应控制策略的结构 Fig 11Structure of the proposed robust neural netw ork ad aptive control 图中,两个神经网络分别作为辨识器NNI 和控 制器NNC 。为提高系统鲁棒性,采用对辨识误差进行自适应预测的方法,并通过一个鲁棒反馈控制器 RC 保证系统稳定性。y p ,y ^ ,y m 分别为受控对象、NNI 和参考模型的输出;u n 和u r 分别为NNC 和RC 的输出;ξ为干扰输入。
%以下是侯忠生教授无模型自适应控制中的一个简单例子,在网上找了很多参考程序没找到,故而自己简单写了下,运行没问题,欢迎探讨。 clc,clear for k=1:1000 if k<=300 ys(k)=0.5*(-1)^round(k/100); elseif 300
这种新的自适应控制技术用来应付各种控制的挑战PID 回路控制着大部分工业装置中的自动化过程。比例-积分-微分算法简单、可靠,50年来被广泛用于成千上万个控制回路。 然而,并不是所有工业过程都可以用PID回路来控制。例如,多变量、非线性和时变等过程都需要用更先进的控制技术。曾几何时,这些技术只出现在学术界的实验室和航天领域,价廉物美的计算机平台的出现使得那些晦涩难解的算法接近了工业用户。 一 自适应控制就是这样的例子。早在1970年代,学术界和工业界的研究人员一直在研究能够自己学习和适应被控过程特性渐变的反馈控制器。 诚然,就迫使过程的输出调整到操作人员所需要的值来讲,所有的过程控制器都是‘自适应的’。然而大多数控制器是根据控制器开始工作之前由操作人员设计(至少是调整)好的算法运行的。操作员会定期地调整常规控制器的参数,在一般情况下,只有在控制器性能由于某种原因恶化后才由人工进行这种调整。真正的自适应控制器,即使过程的特性发生了变化,也能够在运行中自己调整参数以保持其最佳性能。这相当于自动改变控制器的整个策略以适应过程新的特性。例如,一个原先调好用于控制迟缓过程的自适应控制器,当它发现过程对控制作用的响应变得敏感时,就会采用比较保守的整定参数。而固定参数的常规控制器则会继续过度地控制该过程,造成过程的输出严重振荡。 自适应控制器的形式大小各异,也许最常见的是能够自己产生整定参数的自整定PID。1980年代推出的那些按指令或可连续整定PID参数的方法在单回路控制器中到处可见。许多自整定控制器采用专家系统来解决自身P、I、D参数的刷新问题。它们试图仿效控制专家的思维过程,按照一组旨在改善回路闭环性能的、复杂的经验规则来整定参数。当被控过程比较简单并且可以预测时,这种方法很奏效。许多专家自整定控制器都假设过程的动态特性可以完全用增益、滞后时间和时间常数加以量化。控制器无需知道这三个参数的值,但它假定控制器提供的过程输入与由此而生的过程输出之间的关系不受任何其它过程动态特性的影响。 当过程的动态特性变得复杂时问题就会出现。专家系统的规则可能会产生虚假的结果,因为它们并没有收录对付更复杂过程的经验。 在投运新回路时,专家自整定控制器会经历一段痛苦的历程。它们的规则一般被设计成用于处理过程动态特性的逐渐变化或用于校正已有的整定参数。在启用控制器时,一般需人工设定一组控制器的初始参数。 基于模型的自适应控制提供了比专家系统启发式逼近更为精确的控制算法。其控制决策建立在对过程的经验模型上,把输入输出的关系量化为一个微分方程。在连续控制过程的同时,它也能根据最新的输入输出数据提炼模型。 假定最新的模型可以保持到不久的将来,控制器就可以预测未来的过程变化并决定采取何种控制作用拨正其运行方向。考虑到意外因素或时变系统会影响控制作用的未来结果,控制器必须不断地更新自己的过程模型。 据本人的经验,这种方法比起基于规则的控制器,可以适应更广范的过程动态特性。基于模型的自适应控制器可以利用各种已开发出来的整定公式将模型参数转化成控制器参数,如P、I、D值。事实上,我推测这就是在线建模如此受宠
自适应控制系统综述 摘要: 本文首先介绍了自动控制的基本理论及其发展阶段,然后提出自适应控制系统,详细介绍了自适应控制系统的特点。最后描述的是自适应控在神经网络的应用和存在的问题。 关键字:自适应控制神经网络 一、引言 1.1控制系统的定义 自动控制原理是指在没有人直接参与的情况下,利用外加的设备或装置,使机器,设备或生产过程的某个工作状态或参数自动地按照预定的规律运行。 在不同的控制系统中,可能具有各种不同的系统结构、被控对象,并且其复杂程度和环境条件也会各不相同,但他们都具有同样的控制目地:都是为了使系统的状态或者运动轨迹符合某一个预定的功能性能要求。其中,被控对象的运动状态或者运动轨迹称为被控过程。被控过程不仅与被控系统本身有关,还与对象所处的环境有关。控制理论中将控制系统定义为由被控系统及其控制器组成的整体成为控制系统。 1.2控制理论的发展阶段 控制理论发展主要分为三个阶段: 一:20世纪40年代末-50年代的经典控制理论时期,着重解决单输入单输出系统的控制问题,主要数学工具是微分方程、拉氏变换、传递函数;主要方法是时域法、频域法、根轨迹法;主要问题是系统的稳、准、快。 二:20世纪60年代的现代控制理论时期,着重解决多输入多输出系统的控制问题,主要数学工具是以此为峰方程组、矩阵论、状态空间法主要方法是变分法、极大值原理、动态规划理论;重点是最优控制、随即控制、自适应控制;核心控制装置是电子计算机。 三:20世纪70年代之后的先进控制理时期,先进控制理论是现代控
制理论的发展和延伸。先进控制理论内容丰富、涵盖面最广,包括自适应控制、鲁棒控制、模糊控制、人工神经网络控制等。 二、自适应控制系统 2.1自适应控制的简介 在反馈控制和最优控制中,都假定被控对象或过程的数学模型是已知的,并且具有线性定常的特性。实际上在许多工程中,被控对象或过程的数学模型事先是难以确定的,即使在某一条件下被确定了的数学模型,在工况和条件改变了以后,其动态参数乃至于模型的结构仍然经常发生变化。 在发生这些问题时,常规控制器不可能得到很好的控制品质。为此,需要设计一种特殊的控制系统,它能够自动地补偿在模型阶次、参数和输入信号方面非预知的变化,这就是自适应控制。 自适应控制的研究对象是具有一定程度不确定性的系统,这里所谓的“不确定性”是指描述被控对象及其环境的数学模型不是完全确定的,其中包含一些未知因素和随机因素。 任何一个实际系统都具有不同程度的不确定性,这些不确定性有时表现在系统内部,有时表现在系统的外部。从系统内部来讲,描述被控对象的数学模型的结构和参数,设计者事先并不一定能准确知道。作为外部环境对系统的影响,可以等效地用许多扰动来表示。这些扰动通常是不可预测的。此外,还有一些测量时产生的不确定因素进入系统。面对这些客观存在的各式各样的不确定性,如何设计适当的控制作用,使得某一指定的性能指标达到并保持最优或者近似最优,这就是自适应控制所要研究解决的问题。 自适应控制和常规的反馈控制和最优控制一样,也是一种基于数学模型的控制方法,所不同的只是自适应控制所依据的关于模型和扰动的先验知识比较少,需要在系统的运行过程中去不断提取有关模型的信息,使模型逐步完善。具体地说,可以依据对象的输入输出数据,不断地辨识模型参数,这个过程称为系统的在线辩识。随着生产过程的不断进行,通过在线辩识,模型会变得越来越准确,越来越接近于实际。既然模型在不断的改进,显然,基于这种模型综合出来的控制作用也将随之不断的改进。在这个意义下,控制系统具有一定的适应能力。比如说,当系统在设计阶段,由于对象特性的初始信息比较缺乏,系统在刚开始投入运行时可能性能不理想,但是只要经过一段时间的运行,通过在线辩识和控制以后,控制系
一 原理及方法 模型参考自适应系统,是用理想模型代表过程期望的动态特征,可使被控系统的特征与理想模型相一致。一般模型参考自适应控制系统的结构如图1所示。 图1 一般的模型参考自适应控制系统 其工作原理为,当外界条件发生变化或出现干扰时,被控对象的特征也会产生相应的变化,通过检测出实际系统与理想模型之间的误差,由自适应机构对可调系统的参数进行调整,补偿外界环境或其他干扰对系统的影响,逐步使性能指标达到最小值。 基于这种结构的模型参考自适应控制有很多种方案,其中由麻省理工学院科研人员首先利用局部参数最优化方法设计出世界上第一个真正意义上的自适应控制律,简称为MIT 自适应控制,其结构如图2所示。 图2 MIT 控制结构图 系统中,理想模型Km 为常数,由期望动态特性所得,被控系统中的增益Kp 在外界环境发生变化或有其他干扰出现时可能会受到影响而产生变化,从而使其动态特征发生偏离。而Kp 的变化是不可测量的,但这种特性的变化会体现在广义误差e 上,为了消除或降低由于Kp 的变化造成的影响,在系统中增加一个可调增益Kc ,来补偿Kp 的变化,自适应机构的任务即是依据误差最小指标及时调整Kc ,使得Kc 与Kp 的乘积始终与理想的Km 一致,这里使用的优化方法为最优梯度法,自适应律为: ??+=t m d y e B Kc t Kc 0)0()(τ MIT 方法的优点在于理论简单,实施方便,动态过程总偏差小,偏差消除的速率快,而且用模拟元件就可以实现;缺点是不能保证过程的稳定性,换言之,被控对象可能会发散。 Yp Ym e +__ + R 参考模型 调节器被控对象 适应机构 可调系统 ———kmq(s)p(s)Kc Kp q(s)-----p(s) 适应律 R ym yp e +-
模型参考自适应控制 Document serial number【LGGKGB-LGG98YT-LGGT8CB-LGUT-
10.自适应控制 严格地说,实际过程中的控制对象自身及能所处的环境都是十分复杂的,其参数会由于种种外部与内部的原因而发生变化。如,化学反应过程中的参数随环境温度和湿度的变化而变化(外部原因),化学反应速度随催化剂活性的衰减而变慢(内部原因),等等。如果实际控制对象客观存在着较强的不确定,那么,前面所述的一些基于确定性模型参数来设计控制系统的方法是不适用的。 所谓自适应控制是对于系统无法预知的变化,能自动地不断使系统保持所希望的状态。因此,一个自适应控制系统,应能在其运行过程中,通过不断地测取系统的输入、状态、输出或性能参数,逐渐地了解和掌握对象,然后根据所获得的过程信息,按一定的设计方法,作出控制决策去修正控制器的结构,参数或控制作用,以便在某种意义下,使控制效果达到最优或近似更优。目前比较成熟的自适应控制可分为两大类:模型参考自适应控制(Model Reference Adaptive Control)和自校正控制(Self-Turning)。 模型参考自适应控制 10.1.1模型参考自适应控制原理
模型参考自适应控制系统的基本结构与图所示: 模型参考自适应控制系统 它由两个环路组成,由控制器和受控对象组成内环,这一部分称之为可调系统,由参考模型和自适应机构组成外环。实际上,该系统是在常规的反馈控制回路上再附加一个参考模型和控制器参数的自动调节回路而形成。 在该系统中,参考模型的输出或状态相当于给定一个动态性能指标,(通常,参考模型是一个响应比较好的模型),目标信号同时加在可调系统与参考模型上,通过比较受控对象与参考模型的输出或状态来得到两者之间的误差信息,按照一定的规律(自适应律)来修正控制器的参数(参数自适应)或产生一个辅助输入信号(信号综合自适应),从而使受控制对象的输出尽可能地跟随参考模型的输出。 在这个系统,当受控制对象由于外界或自身的原因系统的特性发生变化时,将导致受控对象输出与参考模型输出间误差的增大。于是,系统的自适应机构再次发生作用调整控制器的参数,使得受控对象的输出再一次趋近于参考模型的输出(即与理想的希望输出相一致)。这就是参考模型自适应控制的基本工作原理。
第九章模型参考自适应控制(Model Reference Adaptive Control )简称MRAC 介绍另一类比较成功的自适应控制系统,已有较完整的设计理论和丰富的应用成果(驾驶仪、航天、电传动、核反应堆等等) 。 § 9—1 MRAC的基本概念 系统包含一个参考模型,模型动态表征了对系统动态性能的理 想要求,MRAC力求使被控系统的动态响应与模型的响应相一致。 与STR不同之处是MRAC没有明显的辨识部分,而是通过与参考模 型的比较,察觉被控对象特性的变化,具有跟踪迅速的突出优点。设参考模型的方程为 * X m~ A m X m Br式(9-1-1) y m = CX m 式(9-1-2) 被控系统的方程为 ■ X s A s B s r式(9-1-3) y s - CX s 式(9-1-4) 两者动态响应的比较结果称为广义误差,定义输出广义误差为 e = y m -y s 式(9-1-5); 状态广义误差为
:=X m — s 式(9-1-6)。 自适应控制的目标是使得某个与广义误差有关的自适应控制性能指标J达到最小。J可有不同的定义,例如单输出系统的 J —;e2( )d 式(9-1-7) 或多输出系统的 t T J 二e T( )e( )d 式(9-1-8) MRAC的设计方法目的是得出自适应控制率,即沟通广义误差与被控系统可调参数间关系的算式。有两类设计方法:一类是“局部参数最优化设计方法”,目标是使得性能指标J达到最优化;另一类是使得自适应控制系统能够确保稳定工作,称之为“稳定性理论的设计方法。 § 9 —2局部参数最优化的设计方法 一、利用梯度法的局部参数最优化的设计方法 这里要用到非线性规划最优化算法中的一种最简单的方法梯度法(Gradient Method )。 1. 梯度法