羽毛球发球机及其控制系统设计
- 格式:doc
- 大小:914.50 KB
- 文档页数:31
国内外羽毛球发球机的研究现状---------------------------------------------------------------范文最新推荐------------------------------------------------------ 国内外羽毛球发球机的研究现状19世纪中叶,当时印度的「浦那城」里,有一种游戏开展得十分普遍,它用绒线编织成球形物上插上羽毛,练习者手拿木拍,击出仍到空中的球,这就是羽毛球运动的雏形。
根据考证,在中国古代也早就有了类似羽毛球活动的板羽球游戏。
现在用的比较多的羽毛球发球机主要由三部分组成,它们是储球装置,发球装置以及支撑装置。
储球装置一般由一个圆盘支撑起六到十二个相同的球筒组合而成。
发球装置普遍采用两个柔软的可转动的轮子挤压羽毛球橡胶头部将羽毛球打出,轮子分别由两个电机驱动,通过改变两个电机的转动快慢从而改变发球方向[5]。
支撑装置一般都采用支架。
优点是存球量大,减少重复装球时间,结构合理,易于操作。
缺点是容易卡球造成羽毛球被破坏[6]。
5737还有一种羽毛球发球机是靠气动将羽毛球打出的,该装置体积比较大,同时还需要空气压缩机,成本也1 / 4很高而且操作复杂。
原理是先用空气压缩机将气体压缩后,通过导管将气体传输到喷射口,只要控制喷射口的方向,就能将羽毛球射出去。
一般能发出高吊球、后场球,杀球等[7]。
最后一种发球机是发明最早不过现在不常见的球拍式发球机。
其立板,支撑架,手柄固定安装在上盘上,支撑架同立板和手柄固定连接,立板的上部固定有横梁,横梁上有用于固定球筒的孔,横梁的下方固定有为拨叉提供动力的拨叉盘电机,立板下部同上盘连接的内侧与支撑架固定连接,支撑架上固定有球拍轴和凸轮轴,两轴通过轴承与支撑架相连,球拍轴上设有弹簧装置,球拍柄与凸轮通过键与各自的轴相连,凸轮安装在凸轮轴上,凸轮轴与凸轮电机输出轴相连,手柄与支撑架也固定连接,上盘通过弹簧同底座相连,底座内安装有电池。
羽毛球发球机的功能和使用方法作文英文回答:Badminton Serving Machine: Features and Usage.The badminton serving machine is a fantastic tool for badminton players to practice their serves and improvetheir skills. It is a mechanical device that can automatically serve shuttlecocks to players, simulatingreal game situations. In this essay, I will discuss the features and usage of the badminton serving machine.Firstly, let's talk about the features of the badminton serving machine. One of the key features is the adjustable speed and direction of the serves. Players can set the speed of the shuttlecock to match their skill level and gradually increase the speed as they improve. The machine can also serve shuttlecocks in different directions, allowing players to practice returning shots from various angles. Another feature is the ability to adjust the heightof the serves. This is particularly useful for practicing different types of serves, such as high serves or low serves. Additionally, some advanced models of the serving machine come with a remote control, allowing players to control the serves without having to go back and forth to the machine.Now let's move on to the usage of the badminton serving machine. To use the machine, players need to set it up in a suitable location, preferably on a badminton court or a spacious area with enough room to move around. They should also ensure that there is enough space behind the machinefor the shuttlecocks to be launched without any obstruction. Once the machine is set up, players can adjust the speed, direction, and height of the serves according to their preferences. They can then stand at the receiving end and practice their returns. It is important to start withslower serves and gradually increase the speed as players become more comfortable. Additionally, players can use the machine to practice specific types of serves, such as short serves or flick serves, by adjusting the height anddirection accordingly.In conclusion, the badminton serving machine is a valuable tool for badminton players to improve their serving skills. Its adjustable features and ease of use make it a convenient and effective training aid. By practicing with the serving machine, players can enhance their serves and become more confident in their game. So,if you are a badminton enthusiast looking to take your game to the next level, I highly recommend giving the badminton serving machine a try!中文回答:羽毛球发球机,功能和使用方法。
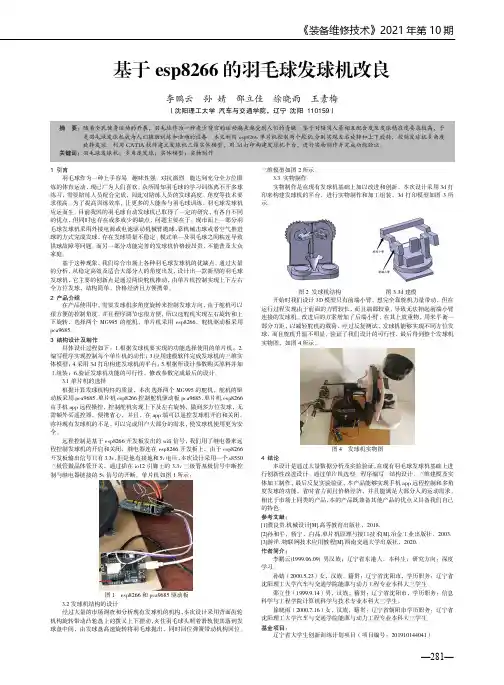
《装备维修技术》2021年第10期—281—基于esp8266的羽毛球发球机改良李鹏云 孙 婧 邵立佳 徐晓雨 王素梅(沈阳理工大学 汽车与交通学院,辽宁 沈阳 110159)1 引言羽毛球作为一种上手容易、趣味性强、对抗激烈、能达到充分全方位锻炼的体育运动,现已广为人们喜欢。
众所周知羽毛球的学习训练离不开多球练习,需要陪练人员配合完成,因此对陪练人员的发球高度、角度等技术要求很高。
为了提高训练效率,让更多的人能参与羽毛球训练,羽毛球发球机应运而生。
目前我国的羽毛球自动发球机已取得了一定的研究,有各自不同的优点,但同时也存在或多或少的缺点,问题主要在于:现市面上一部分羽毛球发球机采用外接电源或电池驱动机械臂抛球,靠机械击球或者空气推进球的方式完成发球,存在发球质量不稳定、模式单一及羽毛球之间粘连导致供球故障等问题。
而另一部分功能完善的发球机价格较昂贵,不能普及大众家庭。
基于这种现象,我们综合市场上各种羽毛球发球机的优缺点,通过大量的分析,从稳定高效及适合大部分人的角度出发,设计出一款新型的羽毛球发球机,它主要的创新点是通过两块舵机推动,由单片机控制实现上下左右全方位发球,结构简单、价格经济且方便携带。
2 产品介绍 在产品使用中,需要发球机多角度旋转来控制发球方向,由于舵机可以很方便的控制角度,并且程序调节也很方便,所以选舵机实现左右旋转和上下旋转,选择两个MG995的舵机,单片机采用esp8266,舵机驱动板采用pca9685。
3 结构设计及制作 具体设计过程如下:1.根据发球机要实现的功能选择使用的单片机;2.编写程序实现控制每个单片机的动作;3.应用建模软件完成发球机的三维实体模型;4.采用3d 打印构建发球机的平台;5.根据所设计参数购买原料并加工组装;6.验证发球机功能的可行性,修改参数完成最后的设计。
3.1单片机的选择根据计算发球机构件的质量,本次选择两个MG995的舵机,舵机的驱动板采用pca9685。
第一章绪论1.1引言随着物质生活水平的提高,人们越来越重视生命的质量。
据调查运动作为一种绿色消费在人民日常消费中所占得比例呈持续上升的趋势。
随着2008年北京奥运会的临近,全民健身运动热潮将愈演愈烈,健身器材的市场需求也会不断扩大。
在我国羽毛球运动是一项很普及的运动,更深受青少年的喜爱。
目前羽毛球发球机的种类还比较少,应该有很大的发展空间。
我的题目是“羽毛球发球机及其控制系统”,主要是利用机械电子相结合的技术,对现有发球机的结构,控制电路加以改进。
主要功能和特点:连续发球、发球方式多、发球变化大、操作简便、发致性好等特点[1]。
这种发球机可以一次性储球160个,羽毛球的扣杀速度最高可达280公里/小时,发球频率不少于60次/分[1]。
1.2国内羽毛球发球机的现状目前我国已存在的发球机种类有三种:第一种是用马达甩动特制拍击球发出,这一种跟我们的击球原理一样,但是角度受限,能模仿的球路不多,一般用于羽毛球工厂的挑球速,挑飞行性的步骤;第二种击打球头发出,相对于第一种比较新,是今年前刚研制出来;第三种是目前国家队正在用的机械臂夹球头高速甩出去,机器很重同时体积也很大。
需要三米高的支架支持,可以模仿出杀球路线,价格也比较贵;第四种是用高压气喷羽毛球发射,这种是刚研制出不久的,它的出现填补了羽毛球自动发球机的空白,是一种新型的发球机[2]。
1.3本文的主要内容和课题的意义在分析和比较羽毛球发球机发球原理的基础上对羽毛球发球机的发球方向和发球速度等运动规律进行分析,设计出一台羽毛球发球机。
要求完成发球机的总体结构设计,选择发球机的发球方向和发球速度的检测和控制系统。
具体内容:1 发球机的结构设计;2 发球机的控制系统设计。
第二章羽毛球发球机的工作原理2.1羽毛球发球机的原理这种羽毛球发球机是一个长方体的结构,分为上下两个部分,上半部分是一个底部倾斜的球筒箱,球筒箱内设有推球杆【3】、推求孔、出球孔、弃球筒孔、弃球筒孔挡板、弃球筒孔电机、分球圈,球筒箱提供连续单个出球;下半部分包括电气比例减压阀、储气室、空气电磁阀、气嘴、炮管、发射孔、单片机控制单元【4】;抓球壁杆从球筒箱的出球孔抓取羽毛球置入炮管,并使羽毛球发球机的原理是用高压气体把羽毛球吹出去[5]。
羽毛球的球托内侧贴在气嘴上,然后空气电磁阀打开,气嘴喷气射出羽毛球。
单片机通过电磁比例阀的通断调节储气室压力,进而控制球发射的距离;单片机通过改变电磁阀的通断间隙,控制发射频率。
2.2羽毛球发球机的工作过程球筒箱(1)内放置羽毛球球筒(2),球筒内有顺序紧密排列放置羽毛球(13)。
推球杆(5)顶端为推球头(12),推球电机(6)顺转,推球杆在皮轮(10)的推动下从推球孔(7)伸入球筒推球。
球在出球孔(4)被推出,出球孔前设有分球圈(3),分球圈挡在两个球中间的空隙中,在前面一个球被抓取时,阻挡下一个球被带出去,当推球杆的后限位片(8)处碰到推球杆后限位开关(9)时说明球筒箱的球已经被推完,需要进行弃球筒处理。
当推球头(12)触碰推球杆前限位开关(11)时。
说明推球杆已经退出球筒。
如图2.1所示。
图2.1 羽毛球发球机推球部分剖面图当球被推出出球孔,羽毛球球托伸入抓球套(14)中,羽毛球球托触碰抓球套微动开关(15),抓球套抓住球,中轴电机(22)顺转,通过中轴(17)带动抓球臂杆(16)和抓有羽毛球的抓球套(14)远离机箱。
当抓球臂杆(16)触碰中轴顶微动开关(19)时,中轴顶电机(18)旋转,通过电机端挡杆(20)和抓球臂挡杆(21)使抓球臂杆(16)旋转到抓球套(14)中的球对准发射孔(30),中轴电机(22)倒转使抓球臂杆(16)接近机箱使羽毛球套在发射孔(30)的气嘴(28)上。
如图2.2所示。
图2.2羽毛球发球机抓球部分剖面图高压空气从空气压缩机中通过软管接到压缩空气进入气孔(23),单片机控制单元(29)通过调节电气比例减压阀(24)控制进入储气室(25)的气量,空气电磁阀(26)打开,使储气室内的压缩空气通过气嘴(28)向羽毛球(13)球托内侧做功,羽毛球发射出炮管(27)。
气嘴外壁上镶嵌有魔术贴,在羽毛球(13)套在气嘴(28)上时,魔术贴粘住羽毛球(13)内侧,使羽毛球(13)不会从气嘴(28)上滑落。
如图2.3所示。
图2.3羽毛球发球机压缩空气发射部分剖视图隔板(33)将机箱空间分成两部分,上半部分是球筒箱(1)容纳球筒(2),下半部分容纳发射部分和控制单元。
抓球臂(16)通过中轴(17)的控制使抓球套(14)从出球孔(4)抓取羽毛球(13)送入发射孔(30)。
当当前被抓取的这筒球被抓完时,推球杆(5)退出球筒(2),弃球筒电机(31)转动使其球筒孔挡板(32)打开,弃出这筒球,挡板及时和上挡住接下来装有羽毛球的球筒(2)。
如图2.4所示。
图2.4羽毛球发球机球筒箱与抓球部分剖视图推球杆(5)将球筒(2)中的羽毛球(13)推出出球孔(4)抓球套(14)在出球孔(4)上方抓取羽毛球(13)送入发射孔套在气嘴(28)上,气嘴喷气,羽毛球被发射出去。
当推球杆后限位片(8)触碰到推球杆后限位开关时,推球杆(5)退出球筒,弃球筒孔电机转动使弃球筒孔挡板(32)打开,弃出这筒球,挡板及时合上挡住接下来装有羽毛球的球筒,继续推球和发球。
2.3小结羽毛球发球基于市场上现有的羽毛球发球机在工作原理与工作过程有很多相似之处,其不同之处在于羽毛球发球机主要是把机器和人脑的智能结合起来控制羽毛球球的速度和旋转,经过单片机的控制,有效地做到了按人的各种运动需求来制定相应的方案,发出满足各种需求的球,并力求物美价廉[6]。
羽毛球发球机的几个创新点:1、它将计算机、控制、机械等技术等先进技术集成,开发出具有变频率、变速度、多功能的运动员用训练和全民健身用多功能发球机;2、开发出可发射定点球、高抛球、变速球等多因素组合的专业运动员测试用发球机;3、创新性地设计出羽毛球多球自动连续输送、分离、发射装置。
第三章羽毛球发球机的结构设计现在市场上的羽毛球发球机形式多种多样,结构也各不相同。
根据发球的动力等自身的特点,本机保留了一些传统国内、外羽毛球球发球机的结构特点,又有了不同程度的创新。
从工作原理和工作过程可以看出,该研究的羽毛球发球机主要组成部分有供球系统、发球系统、单片机控制系统三部分。
根据这些部分的功能,本文采取以下设计方案。
3.1 羽毛球发球机的外形结构设计工业产品设计是创造具有实用功能的造型,不仅要求以其形象所具有的功能适应人们工作的需要,提供人们使用,而且要求以其形象表现的式样、形态、风格、气氛给人以美的感觉和艺术的享受,起到美化生产、生活环境,满足人们审美要求的作用,因而成为具有精神和物质两种功能的造型。
工业造型设计的本源内涵重在物质功能和社会人的感情精神以及人和物相互作用的研究之上。
它以不断变化的人的需求为起点,以积极的势态探求改变人的生存方式的设计。
所以,工业造型设计不是单纯的美术设计,更不是纯粹的造型艺术、美的艺术。
它是科学、技术、艺术、经济融合的产物。
它是从实用和美的综合观点出发,在科学技术、社会、经济、文化、艺术、资源、价值观等的约束下,通过市场交流而为人民服务[7]。
工业造型设计是当代人、自然、社会的有机协调的科学方法论。
其实质是以最优化的设计策划来创造人类自身更合理的生存方式。
它的重要任务是设计物与人相关功能的最优化。
按人类需求去开发新设计、新的工作系统,从而改善人的劳动和生活环境。
由此可见,工业造型设计有以下三个显著的特征,即实用性、科学性和艺术性。
1.实用性特征及要求。
体现使用功能的适合目的性、先进性与可靠性,具有现代科学技术的功能美,充分应用人机工程学原理提高产品的宜人性,表现出产品服务人的舒适美。
2.科学性特征及要求。
体现先进加工手段的工艺美,反映大工业自动化生产及科学性的严格和精确美,标志力学、材料学、机构学新成就的结构美,在不牺牲使用者和生产者利益的前提下,努力降低产品成本,创造最高的附加值。
3.艺术性特征与要求。
应用美学法则创造具有形体美、色彩美、材料美和符合时代审美观念的新颖产品,体现人、产品与环境的整体和谐美[8]。
值得注意的是,在我国从事工业造型设计的设计师还未被确定应有的位置,在大部分工厂和研究设计机构中,这些设计师充当着‘美工”、“外观设计”、“装饰设计”的角色,这也正是我国的工业设计现状与其它先进国家的一个较大差距的原因所在。
简单地将技术、材料和机构布置的设计加上装饰打扮的美化设计,即使是两方面都己达到较高的水平,只要是没有一条统一、清晰的为人类工作、生活方式而设计的思想主线,两者就不会很好地协调在一起,不会取得理想的效果.3.2羽毛球发球机的内部结构设计羽毛球发球机的形状:呈长方体,前侧有一抓球臂杆,后侧有一推球杆,箱体上部有一个底部倾斜的球筒箱,下部容纳电气比例减压阀、储气室、空气电磁阀、发射气嘴、发射炮筒和单片机控制单元。
3.2.1羽毛球发球机球筒箱的设计该系统的作用是储存羽毛球,并将羽毛球按要求供给给发球系统。
是储存羽毛球的地方,还能将羽毛球顺利输送给抓球臂,为了保证能顺利的单个供球,球筒箱底部倾斜,方便球筒顺利滚入出球孔和推球杆之间。
3.2.2推球杆的设计推球杆的作用是把羽毛球从球筒中推出。
推球杆位于球筒箱推球孔后侧,退球电机带动皮轮带动推球杆前进或后退,推球杆上有推球头和后限位片,退球头触动微动开关说明推球杆已经退出球筒,后限位片触动微动开关说明球筒内的球已经被推完,需要进行弃球处理。
3.2.3中轴的设计发球机中有一个中轴,中轴固定在出球孔和发射孔之间,该中轴可以旋转。
中轴的作用是1使抓球臂杆远离机箱,以免抓球臂杆碰到羽毛球发球机的箱体;2使抓球臂绕中轴做圆周运动以实现抓球与放球的动作。
根据中轴的作用,及设计的需要,把中轴设计成阶梯并有螺纹的轴。
如图3.1所示。
图3.1 中轴3.2.4抓球杆臂的设计抓球臂杆通过带有内螺纹的轴套与中轴相连,中轴带动抓球臂杆作相对于球筒箱的垂直运动,中轴顶端有一微动开关和电机,抓球臂杆触动微动开关,电机旋转带动抓球臂旋转,然后中轴旋转,带动抓球臂杆接近球筒箱。
抓球臂一端套在中轴上,一端有抓球套,抓球套被球托顶一下可以抓紧球托,在顶一下可以放松球托。
抓球套中有一微动开关,触动该微动开关,中轴旋转带动抓球臂远离筒箱。
抓球臂杆设计成普通的杆即可。
3.2.5中轴套的设计中轴套的作用是使抓球臂杆远离机箱,中轴套与中轴以螺纹连接。
中轴套的一端与抓球臂杆直接固定在一起,在中轴电机旋转时把中轴的旋转运动变为中轴套与抓球臂杆的平动动。
这样才可以使抓球臂杆触碰中轴顶微动开关。
如图3.2所示。
图3.2 中轴套3.2.6分球圈的设计分球圈位于球筒箱的钱出球孔,当抓球套抓取提离一个球时,分球圈挡住下一个球,阻止下一个球被带出。