几何组成分析的目的,自由度和约束教学单元设计.
- 格式:doc
- 大小:496.00 KB
- 文档页数:6
几何单元整体教学设计一、教学目标通过这个几何单元的教学,学生将能够:1. 理解几何的基本概念和术语;2. 掌握几何中的基本图形的性质和特点;3. 能够运用几何知识解决实际问题;4. 发展几何思维和创造力。
二、教学内容1. 基本概念和术语:点、线段、射线、直线、平行线、垂直线等;2. 基本图形的性质:点、线、角、多边形、圆等;3. 图形的分类及特征:三角形、四边形、正方形、长方形、平行四边形等;4. 图形之间的关系:相似、全等、对称等。
三、教学方法1. 探究式教学:- 学生根据自己的观察和思考,提出和发现几何概念和性质;- 学生通过实验和推理,探索图形之间的关系。
2. 合作研究:- 学生分组合作完成一些几何问题的解决;- 学生相互讨论和交流,共同解决困难和错误。
3. 演示与实践:- 教师通过示范和演示,直观地展示几何概念和性质;- 学生通过实践和实验,巩固和应用所学知识。
四、教学流程1. 引入:- 通过展示一些几何图形和实际场景,激发学生的兴趣和好奇心。
2. 提出问题:- 提出几何问题,引导学生思考和探究。
3. 探究和讨论:- 学生自主探究和讨论几何概念和性质,帮助他们理解和掌握。
4. 教师辅助讲解:- 教师讲解和解释一些学生提出的问题,并给出相关的例子和证明。
5. 实践和应用:- 学生进行几何实践和应用,运用所学知识解决一些实际问题。
6. 小组合作:- 学生分组合作,共同解决一些几何问题。
7. 总结和归纳:- 学生总结所学内容,并归纳出几何的基本思维方法和策略。
五、教学评估1. 平时作业:- 学生完成几何题目的练和作业,检测他们的掌握情况。
2. 课堂表现:- 学生在课堂上的参与度、合作精神和表达能力等。
3. 小组合作评价:- 合作小组评价自己合作的过程和结果,给予反馈和建议。
六、教学资源1. 教材:几何教材,包括概念解释、例题和题等。
2. 教具:几何工具,例如直尺、量角器、图钉等。
3. 多媒体资源:几何图形的展示、动画和实例教学等。

4-3几何不变体系的组成规则教学活动设计2.教学实施【步骤l】复习巩固和引入新课自由度,约束类型⑵引入新课(例题):1)三个刚片之间如何用铰连接可形成几何不变体系且无多余约束2)三个刚片之间如何用链杆连接可形成几何不变体系且无多余约束【步骤2】课程介绍及知识讲授教学地点教师任务学生任务教学条件时间(分钟)多媒体教室※1.三刚片规则的描述;※2.两刚片规则的描述;※3.二元体规则。
4. 瞬变体系(注:标注“※”为重要内容)。
听课,获取有关知识和信息多媒体课件70㈠三刚片规则平面中三个独立的刚片,共有九个自由度,而组成一个刚片后便只有三个自由度。
由此可见,在三个刚片之间至少应加入六个约束,才可能将三个刚片组成一个几何不变体系。
图1(a)所示,刚片Ⅰ、刚片Ⅱ和刚片Ⅲ用不在同一直线的A、B和C三个铰两两相连。
这一情况如同用三条直线AB、AC和BC作一三角形。
由平面几何知识可知,用三条定长的线段只能做出一个形状和大小都一定的三角形。
也就是说,由此得出的三角形是几何不变的。
所以得出,三个刚片用不在同一直线上的三个铰两两相联,则所组成的体系是没有多余约束的几何不变体系。
当然,两两相连的铰也可以是由两根链杆构成的虚铰,如图1(b)所示。
图1(二)两刚片规则两个刚片用一个铰和一根不通过该铰的链杆相连,则所组成的体系是没有多余约束的几何不变体系。
有时用两刚片规则来分析问题更方便些。
前边已指出,两根链杆的约束作用相当于一个铰的约束作用。
因此,若将图2(a)所示体系中的铰C用两根链杆来代替,则两刚片规则也可叙述为:两个刚片用三根不完全平行也不完全交于一点的链杆相连,所组成的体系是没有多余约束的几何不变体。
图2(三)二元体规则所谓二元体是指由两根不在同一直线上的链杆联结一个新结点的装置。
如图3(a)、(b)所示。
图3(a)所示,在一个无多余约束的刚片上增加一个二元体,组成无多余约束的几何不变体系,此规则称二元体规则。
利用连续增加二元体的方法,可以得到更为一般的几何不变体。
4.1-4.2几何组成分析的目的,自由度和约束教学单元设计
单元名称几何组成分析的目的,自由度和约束学时 3 项目名称平面体系的几何组成分析
教学地点多媒体教室学生角色设计辅助人员
教学目标
知识目标技能目标态度目标
(1)掌握杆件体系的分类
(2)掌握几何不变体系的的概
念
(3)掌握几何可变体系的概念
(4)知道几何组成分析的目的
(5)自由度的概念
(6)约束的类型
(1)能对平面杆件体系进行
分类
(2)能找出平面体系中的刚
片
(3)会进行约束之间的相互
替换
(1)能按时到课,遵守
课堂纪律,积极回答课堂
问题,按时上交作业;
(2)课下能积极认真练
习教室布置的工作任务;
(3)认真完成老师布置
的预习任务。
能力训练任务
及案例(1)完成案例任务1:几何不变体系的概念;(2)完成案例任务2:几何可变体系的概念;(3)完成案例任务3:各种约束之间的关系。
教学重点、难点重点:自由度和约束。
难点:几何组成分析的目的,约束的类型。
教学方法、手段案例法,讲练结合法,黑板、多媒体课件,动画。
教学组织过程
引入新课:教师用“案例法”引入案例,提出问题(该体系是否可以作为结构使用?)让学生根据已掌握的基础知识分组讨论解决问题,教师辅导评价;然后,讲述几何不变体系的概念,几何可变体系的概念,几何组成分析的目的,自由度和约束的概念。
布置练习(通过课后查找资料,加深对平面杆件体系类型等知识的理解),教师辅导答疑,教师提供答案,评价此过程。
教学条件工程案例;练习题;课程相关课件。
作业基础试题(填空、选择题等)
备注
2.教学实施
【步骤l】引入新课
教学地点教师任务学生任务教学条件时间(分钟)多媒体教室学习任务引入与教师互动回答多媒体课件10
(1)引入新课(案例):
1)该体系是否可以作为结构使用?
【步骤2】课程介绍及知识讲授
教学地点教师任务学生任务教学条件时间(分钟)
多媒体教室
1.几何不变体系的的概念(特征、结构组成和
工作原理);
2.几何可变体系的概念;
3.几何组成分析的目的。
4 自由度的概念;
※5 约束的类型
(注:标注“※”为重要内容)。
听课,获取有关
知识和信息
多媒体
课件
100
㈠几何组成分析的目的
1. 分析体系的几何组成,以确定它们属于哪一类体系,称为体系的几何组成分析。
几何组成分析的目的主要有以下几个方面。
(1)结构必须是几何不变体系。
判别某一体系是否几何不变,从而决定它能否作为结构应用。
(2)通过对结构体系的几何组成分析,能正确区分静定结构和超静定结构,以便选择计算方法。
(3)对结构体系的几何组成分析,可明确各物体之间的几何组成顺序,在求解静定结构的约束力时能确定选取研究对象的次序。
(4)通过对结构体系的几何组成分析, 可明确各构件之间的几何组成过程的依赖关系,以便确定结构的施工顺序。
(二)平面体系的几何性质
结构要能承受荷载,首先要求其几何形状保持不变;其次是要满足强度、刚度和稳定性。
结构受荷载作用后是要发生变形的,这种变形一般是微小的,因此,在不考虑材料的变形情况下,单从几何性质方面考虑,将杆件体系可以分为以下两类:
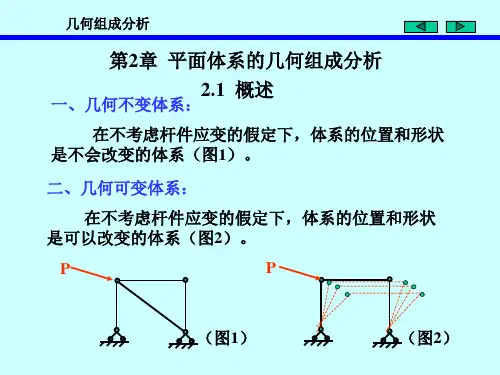
(1) 几何不变体系。
体系受任意荷载作用后,其几何形状和位置都不改变,。
(2) 几何可变体系。
体系受任意荷载作用后,其几何形状和位置都是可以改变的。
几何不变体系几何可变体系
刚片的概念
在几何组成分析中,可能遇到各种各样的平面物体,不论其具体形状如何,由于不考虑杆件的变形,因此可把体系中的每一杆件或几何不变的某一部分看作一个刚体。
平面内的刚体称为刚片。
(三)自由度
所谓平面体系的自由度是指该体系运动时可以独立变化的几何参数的数目,即确定体系的位置所需的独立坐标的数目。
图1 图2
平面内一点有两种独立运动方式(两个坐标x, y可以独立地改变),所以一点在平面内有两个自由度,如图1所示。
一个刚片在平面内有三种独立运动方式(三个坐标x, y, 可以独立地改变),所以一个刚片在平面内有三个自由度,如图2所示。
如果一个体系有n 个独立的运动方式,则这个体系有n 个自由度。
一个体系的自由度,等于这个体系运动时可以独立改变的坐标数目。
普通机械中使用的机构是有自由度的,即可发生运动;一般工程结构都是几何不变体系,其自由度为零。
凡是自由度大于零的体系就是几何可变体系。
(四)约束
凡是能够减少体系自由度的装置都可称为约束。
能减少一个自由度,就说它相当于一个约束。
(1)链杆——是两端以铰与别的物体相联的刚性杆。
一个刚片在平面内有三个自由度
( θ,,A A y x ) ,若增加一根链杆把 A 点与基础相连,如图1所示。
则A 点的坐标A A y x ,相互不独立,并且都是角β的函数;则此刚片还剩下两个运动独立几何参数角θ和角β;故此刚片的自由度变为2。
所以,一根链杆可抵销一个自由度,即相当于一个约束。
图1
(2)单铰——联结两个刚片的铰。
两个刚片在平面内有6个自由度,若用铰A 连接,则还剩下四个运动独立几何参数A x , A y ,1θ , 2θ,如图2所示。
因此,一个单铰相当于两个约束,抵销两个自由度。
图2 图3
(3)复铰——联结三个或三个以上刚片的铰。
三个刚片用铰A 连接,其自由度由9减少为5(A x , A y ,1θ , 2θ,
3
θ),如图3所示。
由此类推:连接n 个刚片的复铰,相当于n-1个单铰
或2(n-1)个约束。
例如连接10个刚片的复铰,相当于18个约束,而体系的自由度应为3×10-18=12。
图4
(4)刚性连结。
两个刚片,若用刚结点连接,则两者被连为一体成为一个刚片,自由度由6减少为3。
连接两个刚片的刚结点相当于3个约束,如图4(a)所示。
连接 n 个刚片的刚结点,它相当于n-1个单刚结点或3(n- 1)个约束,图4-8(b)所示刚结点相当于6个约束。
(5)虚铰。
两根链杆的约束作用相当于一个单铰,不过,这个铰的位置若是在链杆轴线的延长线上,且其位置随链杆的转动而变化,与一般的铰不同,称为虚铰, 如图5(a)所示。
当连结两个刚片的两根链杆平行时,则认为虚铰位置在沿链杆方向的无穷远处,如图5(b)所示。
图5
【步骤3】实训任务布置(或提问)
教学地点教师任务学生任务教学条件时间(分钟)
多媒体教室提出问题接受任务多媒体课件 5
教学内容及要求:
1、链杆约束,单铰约束,复铰约束和刚性连接之间有什么关系?
2、列举出一些几何不变体系。
【步骤4】学生实训
教学地点教师任务学生任务教学条件提交成果时间(分钟)多媒体教室辅导、解惑分组进行分析多媒体教室作业25
教学内容及要求:
1. 给予必要的教学提示,如一个单铰相当于两根链杆约束;
2. 学生列举常见的几何不变体系和几何可变体系。
【步骤5】评价及反馈
教学地点教师任务学生任务教学条件时间(分钟)多媒体教室评判、任务布置记录课后任务多媒体10
教学内容及要求:
1. 教师根据学生完成任务及成果提交情况点评。
2. 课下学习任务布置(查找资料,加深对几何不变体系的特征、约束类型等知识的理解)。