基于OpenCV的车道线实时检测
- 格式:ppt
- 大小:2.65 MB
- 文档页数:23
使用Python和OpenCV在道路上找到车道线
使用Python和OpenCV在道路上找到车道线
识别道路上的车道是所有司机的共同任务,以确保车辆在驾驶时处于车道限制之内,并减少因越过车道而与其他车辆发生碰撞的机会。
对自动驾驶汽车来说,这同样也是一项关键任务。
事实证明,使用计算机视觉技术识别道路上的车道标记是可能的。
本算法将介绍其中的一些技术。
这个项目的目标是创建一种方法,使用Python和OpenCV在道路上找到车道线。
实例图像
Udacity提供了960 x 540像素的示例图像,用于训练我们的算法。
下面是提供的两个图像。
算法步骤
在这一部分中,我们将详细介绍本算法所需的不同步骤,这将使我们能够识别和分类车道线,如下所示:
将原始图像转换为HSL
从HSL图像中分离出黄色和白色
将分离的HSL与原始图像相结合
将图像转换为灰度,便于操作
应用高斯模糊来平滑边缘
在平滑的灰色图像上应用Canny边缘检测
跟踪感兴趣的区域,并剔除其他区域的信息
执行一个霍夫变换,在我们感兴趣的区域内找到车道,并用红色跟踪它们
分开左车道和右车道
插入直线梯度来创建两条平滑的直线
每个步骤的输入都是前一步的输出(例如,我们对区域分割图像应用Hough变换)。
转换到不同的色彩空间
虽然我们的图像目前是RBG格式,但是我们应该探索在不同的颜色空间,如HSL或HSV。
基于OpenCV的视频道路车辆检测与跟踪近年来,智能驾驶技术飞速进步,视频道路车辆检测与跟踪技术成为了分外重要的探究方向之一。
OpenCV是一个广泛应用于计算机视觉领域的开源库,可以提供各种强大的图像处理和分析功能。
本文将介绍技术,并展示其在智能交通系统中的应用。
1. 引言在智能交通系统中,视频监控系统可以实时得到道路上的交通信息,并援助提高交通安全性和效率。
其中,车辆检测与跟踪是视频监控系统中一个重要的环节。
本文将使用OpenCV实现车辆检测与跟踪算法,并探讨其在实际应用中的效果和问题。
2. 车辆检测车辆检测是智能交通系统中关键的一环。
起首,需要将视频图像进行预处理,包括去噪、图像增强和尺寸归一化等。
接下来,可以使用机器进修算法或深度进修算法训练一个目标检测模型,来检测图像中的车辆位置。
其中,传统的机器进修算法如Haar特征分类器、HOG+SVM等已经被证明有效。
此外,深度进修算法如YOLO、Faster R-CNN等也能够在车辆检测任务中取得不俗效果。
3. 车辆跟踪车辆跟踪是在车辆检测的基础上,通过追踪连续的视频帧来实现对车辆的跟踪。
在OpenCV中,有多种跟踪算法可供选择,如均值漂移、卡尔曼滤波、基于流的光流跟踪等。
这些算法可以依据车辆的运动特点和场景要求,选择最适合的算法进行车辆跟踪。
4. 算法实现与优化基于OpenCV,可以通过编程实现车辆检测与跟踪算法。
在实现过程中,需要注意优化算法的效率和准确性。
起首,可以通过图像金字塔技术来提高算法的检测和跟踪速度。
其次,可以利用GPU加速和多线程技术来提高算法的处理速度。
此外,还可以借助OpenCL等并行计算框架来加速算法的执行。
5. 试验与结果分析为了验证基于OpenCV的车辆检测与跟踪技术的有效性,进行了一系列试验。
试验数据包括不同场景下的道路视频,通过与手动标注的真值进行比较,评估了算法的检测准确度和跟踪精度。
试验结果表明,基于OpenCV的车辆检测与跟踪技术在不同场景下都具备一定的检测和跟踪能力。
基于OpenCV实现车道线检测(⾃动驾驶机器视觉)⽬录0 前⾔1 车道线检测2 ⽬标3 检测思路4 代码实现4.1 视频图像加载4.2 车道线区域4.3 区域4.4 canny 边缘检测4.5 霍夫变换(Hough transform)4.6 HoughLinesP 检测原理0 前⾔⽆⼈驾驶技术是机器学习为主的⼀门前沿领域,在⽆⼈驾驶领域中机器学习的各种算法随处可见,今天学长给⼤家介绍⽆⼈驾驶技术中的车道线检测。
1 车道线检测在⽆⼈驾驶领域每⼀个任务都是相当复杂,看上去⽆从下⼿。
那么⾯对这样极其复杂问题,我们解决问题⽅式从先尝试简化问题,然后由简⼊难⼀步⼀步尝试来⼀个⼀个地解决问题。
车道线检测在⽆⼈驾驶中应该算是⽐较简单的任务,依赖计算机视觉⼀些相关技术,通过读取 camera 传⼊的图像数据进⾏分析,识别出车道线位置,我想这个对于 lidar 可能是⽆能为⼒。
所以今天我们就从最简单任务说起,看看有哪些技术可以帮助我们检出车道线。
我们先把问题简化,所谓简化问题就是⽤⼀些条件限制来缩⼩车道线检测的问题。
我们先看数据,也就是输⼊算法是车辆⾏驶的图像,输出车道线位置。
更多时候我们如何处理⼀件⽐较困难任务,可能有时候我们拿到任务时还没有任何思路,不要着急也不⽤想太多,我们先开始⼀步⼀步地做,从最简单的开始做起,随着做就会有思路,同样⼀些问题也会暴露出来。
我们先找⼀段视频,这段视频是我从⽹上⼀个关于车道线检测项⽬中拿到的,也参考他的思路来做这件事。
好现在就开始做这件事,那么最简单的事就是先读取视频,然后将其显⽰在屏幕以便于调试。
2 ⽬标检测图像中车道线位置,将车道线信息提供路径规划。
3 检测思路图像灰度处理图像⾼斯平滑处理canny 边缘检测区域 Mask霍夫变换绘制车道线4 代码实现4.1 视频图像加载import cv2import numpy as npimport sysimport pygamefrom pygame.locals import *class Display(object):def __init__(self,Width,Height):pygame.init()pygame.display.set_caption('Drive Video')self.screen = pygame.display.set_mode((Width,Height),0,32)def paint(self,draw):self.screen.fill([0,0,0])draw = cv2.transpose(draw)draw = pygame.surfarray.make_surface(draw)self.screen.blit(draw,(0,0))pygame.display.update()if __name__ == "__main__":solid_white_right_video_path = "test_videos/丹成学长车道线检测.mp4"cap = cv2.VideoCapture(solid_white_right_video_path)Width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))Height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))display = Display(Width,Height)while True:ret, draw = cap.read()draw = cv2.cvtColor(draw,cv2.COLOR_BGR2RGB)if ret == False:breakdisplay.paint(draw)for event in pygame.event.get():if event.type == QUIT:sys.exit()上⾯代码学长就不多说了,默认⼤家对 python 是有所了解,关于如何使⽤ opencv 读取图⽚⽹上代码⽰例也很多,⼤家⼀看就懂。

opencv车道线检测opencv车道线检测完成的功能1. 图像裁剪:通过设定图像ROI区域,拷贝图像获得裁剪图像2. 反透视变换:⽤的是⽼师给的视频,没有对应的变换矩阵。
所以建⽴⼆维坐标,通过四点映射的⽅法计算矩阵,进⾏反透视变化。
后因ROI区域的设置易造成变换矩阵获取困难和插值像素得到的透视图效果不理想,故没应⽤。
3. ⼆值化:先变化为灰度图,然后设定阈值直接变成⼆值化图像。
4. 形态学滤波:对⼆值化图像进⾏腐蚀,去除噪点;然后对图像进⾏膨胀,弥补对车道线的腐蚀。
5. 边缘检测:canny变化、sobel变化和laplacian变化中选择了效果⽐较好的canny变化,三者在代码中均可⽤,canny变化效果稍微好⼀点。
6. 直线检测:实现了两种⽅法①使⽤opencv库封装好的霍夫直线检测函数,在原图对应区域⽤红线描出车道线②⾃⼰写了⼀种直线检测,在头⽂件中,遍历ROI区域进⾏特定⾓度范围的直线检测。
两种⽅法均可在视频中体现,第⼀种⽅法运⾏效率较快。
7. 按键控制:空格暂停,其余键退出,⽅便调试和截图。
实现的效果在亮度良好道路条件良好的情况下,检测车前区域的车道线实现⽐较成功,排除掉⾼速护栏的影响,⽽且原图像还能完整体现。
车⼦⾏驶在⾼速公路⼤型弯道上,可以在⼀定⾓度范围内认定车道线仍是直线,检测出为直线。
车⼦切换过程中只有⼀根车道线被识别,但是稳定回变换车道后,实现效果良好。
减速线为黄⾊,⼆值化是也被过滤,没造成影响。
亮度,图像亮度变低,⼆值化时同⼀阈值把车道线给过滤掉,造成⽆法识别车道线的现象。
在道路损坏的情况下,由于阈值⼀定,基本上检测不出车道线。
结论实现的功能:实现了车道线检测的基本功能,反透视变换矩阵实现了但效果不太理想,使⽤⾃⼰写的直线检测部分,车道线识别抗⼲扰能⼒较强。
缺点:整个识别系统都是固定的参数,只能在特定的环境产⽣良好的效果。
改进空间:提取全部关键参数,每次对ROI图像进⾏快速扫描更新参数,否则使⽤默认参数。
041基于OpenCV 的车道线检测Abstract: In order to complete the lane detection target, taking turns OpenCV as the main platform for image preprocessing, edge detection, Canny operator, Hof transform operation of the onboard camera picture of the road, lane detection, provides a reference for the detection of the lane.Key words: Lane detection OpenCV Canny operator Hof transformJiang Liangchao Li Chuanyou Yin Fanqing (Chang'an University)Lane Detection Based on OpenCV摘要:为完成车道线检测的目标,本文以OpenCV 转件为主要平台,对车载摄像机拍摄的道路图片进行图像预处理、canny 算子边缘提取、霍夫变换等操作,完成车道线的检测,为车道线的检测提供了一定的参考。
关键词:车道线检测 OpenCV Canny 算子 霍夫变换姜良超 李传友 殷凡青 (长安大学)1 前言近年,随着车辆数量急剧增加,导致交通事故频发。
据统计,美国约有 28%以上的交通事故均由车辆偏离驾驶路线引起;在中国,由车辆车道偏离引发的交通安全事故占比约 50%。
为解决上述问题,需要提高智能交通系统(ITS )方面的发展。
汽车安全驾驶辅助系统作为智能交通系统的一个重要分支,具体的应用主要包括以下几个方面:车道保持辅助、碰撞警告、停车辅助、偏离车道警告等。
为实现上述功能,车辆必须准确地获取车道线。
基于深度学习的车道线检测方法研究与应用I. 简述随着科技的发展,越来越多的人开始关注这一领域。
近年来研究人员们提出了许多新的算法和技术,使得车道线检测的准确性和鲁棒性得到了很大的提高。
同时这些方法也在不断地应用于实际的道路监控系统和自动驾驶汽车中,为人们的出行带来了极大的便利。
基于深度学习的车道线检测方法是一项非常有前景的技术,相信在未来的日子里,它会为我们的生活带来更多的惊喜和便利。
A. 研究背景和意义随着科技的飞速发展,人工智能技术在各个领域都取得了显著的成果。
其中基于深度学习的计算机视觉技术在车道线检测方面具有广泛的应用前景。
然而当前市场上的车道线检测方法仍存在许多问题,如检测精度不高、对复杂场景适应性差等。
因此研究一种高效、准确且具有良好泛化能力的车道线检测方法具有重要的理论和实际意义。
首先车道线检测对于自动驾驶汽车的安全驾驶至关重要,在复杂的道路环境中,车辆需要能够准确地识别车道线,以便更好地规划行驶路线和保持车速稳定。
此外车道线检测还有助于提高驾驶员的驾驶舒适度和安全性,降低交通事故的发生率。
其次车道线检测方法的研究与应用将推动计算机视觉技术的发展。
深度学习作为一种强大的机器学习方法,已经在图像识别、目标检测等领域取得了突破性进展。
将深度学习技术应用于车道线检测,有望提高检测方法的性能和效率,为其他计算机视觉任务提供有力支持。
车道线检测方法的研究与应用将促进智能交通系统的建设,随着城市化进程的加快,交通拥堵和交通安全问题日益严重。
通过研究更先进的车道线检测方法,可以为智能交通系统提供更加精确的道路信息,从而提高道路通行效率和交通安全水平。
基于深度学习的车道线检测方法研究与应用具有重要的研究背景和意义。
这不仅有助于解决当前市场上存在的问题,提高车道线检测的性能和实用性,还将推动计算机视觉技术的发展和智能交通系统的建设。
因此我们应该积极投入到这一领域的研究中,为实现自动驾驶汽车的普及和道路交通安全做出贡献。
占用应急车道检测Python
车道线检测是自动驾驶汽车以及一般计算机视觉的关键组件。
这个概念用于描述自动驾驶汽车的路径并避免进入另一条车道的风险。
在本文中,我们将构建一个机器学习项目来实时检测车道线。
我们将使用 opencvo 库使用计算机视觉的概念来做到这一点。
为了检测车道,我们必须检测车道两侧的白色标记。
使用 Python 和 opencvo 进行道路车道线检测
使用Python 中的计算机视觉技术,我们将识别自动驾驶汽车必需行驶的道路车道线。
这将是自动驾驶汽车的关键部分,因为自动驾驶汽车不应该越过它的车道,也不应该进入对面车道以避免事故。
帧掩码和霍夫线变换
要检测车道中的白色标记,首先,我们需要屏蔽帧的其余部分。
我们使用帧屏蔽来做到这一点。
该帧只不过是图像像素值的bumpy 数组。
为了掩盖帧中不必要的像素,我们只需将bumpy 数组中的这些像素值更新为 0。
制作后我们需要检测车道线。
用于检测此类数学形状的技术称为霍夫变换。
霍夫变换可以检测矩形、圆形、三角形和直线等形状。
再来说下实现的主要步骤和环节吧
第一步:对视频的每一帧,做图像处理,包括蒙版、灰度化、二值化和去除噪声;
第二步:利用霍夫变换,在图片中提取出线段集合;
第三步:对提取出的线段集合做一定的处理。
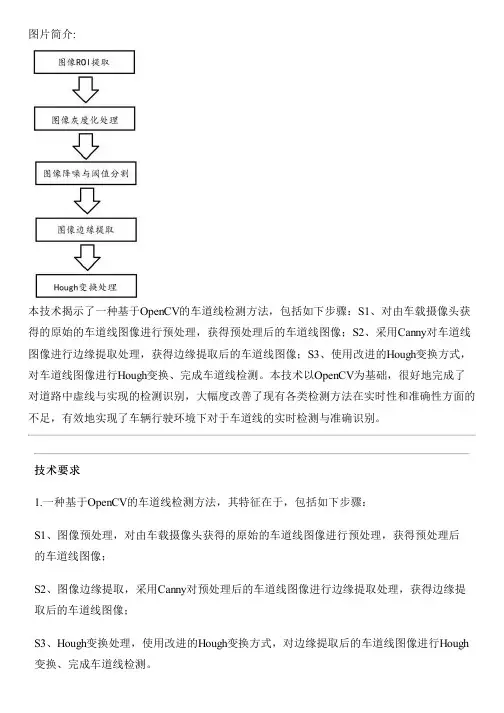
图片简介:本技术揭示了一种基于OpenCV的车道线检测方法,包括如下步骤:S1、对由车载摄像头获得的原始的车道线图像进行预处理,获得预处理后的车道线图像;S2、采用Canny对车道线图像进行边缘提取处理,获得边缘提取后的车道线图像;S3、使用改进的Hough变换方式,对车道线图像进行Hough变换、完成车道线检测。
本技术以OpenCV为基础,很好地完成了对道路中虚线与实现的检测识别,大幅度改善了现有各类检测方法在实时性和准确性方面的不足,有效地实现了车辆行驶环境下对于车道线的实时检测与准确识别。
技术要求1.一种基于OpenCV的车道线检测方法,其特征在于,包括如下步骤:S1、图像预处理,对由车载摄像头获得的原始的车道线图像进行预处理,获得预处理后的车道线图像;S2、图像边缘提取,采用Canny对预处理后的车道线图像进行边缘提取处理,获得边缘提取后的车道线图像;S3、Hough变换处理,使用改进的Hough变换方式,对边缘提取后的车道线图像进行Hough 变换、完成车道线检测。
2.根据权利要求1所述的基于OpenCV的车道线检测方法,其特征在于,S1所述图像预处理,包括如下步骤:S11、图像ROI提取,采用OpenCV中的cvSetImageROI函数对车载摄像头所拍摄的图片进行感兴趣区域的剪裁选取;S12、图像灰度化处理,对彩色三通道RGB的原始的车道线图像进行转化,建立亮度H与R、G、B三个颜色的对应,以H亮度值表达出图像中每个像素点的灰度值,并采用OpenCV中的cvCvtColor函数完成对整个原始的车道线图像的灰度处理,获得单通道HSV 的车道线图像;S13、图像降噪与阈值分割,采用OpenCV中的medianBlur_SortNet函数消除车道线图像中的噪声,采用OTSU算法对车道线图像进行阈值分割,获得预处理后的车道线图像。
3.根据权利要求1所述的基于OpenCV的车道线检测方法,其特征在于,S2所述图像边缘提取,包括如下步骤:S21、图像平滑处理,使用高斯滤波器平滑图像、对车道线图像进行加权平均,图像中任意一个像素点的值均由其自身及邻域内其他像素点的值经加权平均后获得,计算公式为,,其中,为概率,为高斯半径值,;S22、确定梯度幅值和方向,使用soble算子、结合车道线图像进行水平和垂直方向的边缘检测计算,得到对应图像的梯度幅值和梯度方向;S23、图像边缘量化,沿着梯度方向对梯度幅值进行非极大值抑制,完成对图像的边缘量化;S24、边缘细化,选取车道线图像上的任意一个像素点,将其领域中心与沿梯度方向上的相邻两个像素点进行比较,若该像素点的中心像素为最大值则保留,否则将该像素点的中心像素置0;S25、边缘连接,使用双阈值算法检测和连接边缘,选取两个系数作为阈值,其中一个为高阈值TH、另外一个为低阈值TL,取TH=0.2、TL=0.1,将小于阈值的像素点标记为0并抛弃;将大于阈值的点标记为1。
基于OpenCV的车道线识别与跟踪算法作者:王玉萍张晨晨来源:《企业科技与发展》2018年第02期【摘要】随着无人驾驶汽车技术和机器视觉研究的不断升温,车道线识别与跟踪算法逐渐被人们重视。
文章通过定义热点区域并融合其他检测算法提出一种车道线识别与跟踪方法。
经过验证,该方法能够在复杂环境下准确地提取出车道线,并预测出消失点,具有较强的实时性、准确性和鲁棒性,对无人驾驶技术具有一定辅助作用。
【关键词】车道线识别与跟踪;Canny边缘检测;Hough检测器;热点区域【中图分类号】TP391 【文献标识码】A 【文章编号】1674-0688(2018)02-0197-02随着近年计算机视觉和深度学习算法的快速发展,越来越多学者将视觉传感器融合进无人驾驶技术。
车道线作为车辆行驶道路上较为重要的信息也迎来了研究热潮。
本文提出了一种有效的车道线识别与跟踪算法,以提高车道线识别的效率及准确率。
1 车道线识别与跟踪算法思路车道线识别与跟踪算法属于典型的机器视觉应用:通过视觉传感器获取每一帧图像进行智能分析,判断出车辆是否偏移路线,算法主要思路如下。
Step1:图像预处理。
获取视觉传感器传递的一帧图像进行中值滤波,选择适当的边缘检测算法将图像边缘信息进行细化,然后对其检测结果进行热点区域分割。
Step2:车道线检测。
选择检测器进行直线检测,图像经过预处理之后,车道线区域将会比较突出,利用检测器在进行车道线检测的同时会自动过滤掉无效信息,保留与真实车道线最接近的两条直线。
Step3:车道线跟踪。
检测消失点,延长两条直线交于一点,交点转化到二维平面的消失点。
Step4:偏移预警。
通过偏移度对车辆进行监控以达到辅助驾驶的目的[1]。
2 车道线识别与跟踪算法实现2.1 图像预处理图像预处理决定车道线检测的效果,主要研究内容分为中值滤波、边缘检测和兴趣区域选定三部分。
(1)中值滤波。
中值滤波能够很好地剔除干扰像素,并且保护边缘信息。
基于OpenCV的车道线识别技术研究一、概述随着车辆的普及,交通安全问题变得愈加重要。
在道路行驶过程中,车道线扮演着重要的角色。
传统的车道线识别技术需要人工标注,效率低并且耗时。
基于OpenCV的车道线识别技术可以自动识别车道线,提高行车安全性。
本文将对基于OpenCV的车道线识别技术进行详细研究。
二、OpenCV简介OpenCV是一个跨平台的开源计算机视觉库,使用C++和Python编写。
它具有一系列用于图像处理、计算机视觉和机器学习的函数,可用于开发桌面或移动端等应用。
OpenCV可在Windows、Linux、macOS、iOS和Android等多个平台上运行,且支持多种编程语言。
三、车道线识别技术原理车道线识别技术需要使用图像处理和计算机视觉技术。
当车辆行驶时,车载摄像头按一定间隔获取路面的图像。
首先需要对图像进行预处理,在预处理步骤中可以使用滤波器、二值化等技术,以便更好地识别车道线。
接下来,除去不相关的区域,如天空、树木、建筑物等,仅保留车道部分的图像。
这可以通过ROI(region of interest)技术实现。
进一步,可以使用霍夫变换(Hough Transform)将二值化图像中的直线转换为笛卡尔坐标系中的点。
最后,根据这些点,可以使用曲线拟合技术(如最小二乘法)找到最适合车道线参数的多项式系数。
最终,将此曲线绘制在原始图像上。
四、OpenCV实现车道线识别技术OpenCV提供了大量的函数和技术来实现车道线识别技术。
首先,通过OpenCV图像处理函数对图像进行预处理,如高斯滤波、灰度化和边缘检测等。
具体实现步骤如下:1.读取图像并转换为灰度图像Mat img = imread(“image.png”);Mat gray;cvtColor(img, gray, CV_BGR2GRAY);2.使用高斯滤波器平滑图像GaussianBlur(gray, gray, Size(3, 3), 0);3.进行Canny边缘检测Mat edges;Canny(gray, edges, 50, 150);接下来,可以使用ROI技术,实现对车道部分的识别。
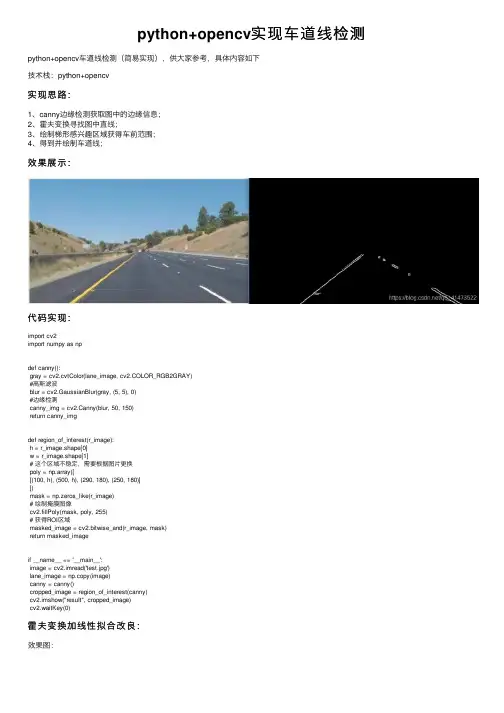
python+opencv实现车道线检测python+opencv车道线检测(简易实现),供⼤家参考,具体内容如下技术栈:python+opencv实现思路:1、canny边缘检测获取图中的边缘信息;2、霍夫变换寻找图中直线;3、绘制梯形感兴趣区域获得车前范围;4、得到并绘制车道线;效果展⽰:代码实现:import cv2import numpy as npdef canny():gray = cv2.cvtColor(lane_image, cv2.COLOR_RGB2GRAY)#⾼斯滤波blur = cv2.GaussianBlur(gray, (5, 5), 0)#边缘检测canny_img = cv2.Canny(blur, 50, 150)return canny_imgdef region_of_interest(r_image):h = r_image.shape[0]w = r_image.shape[1]# 这个区域不稳定,需要根据图⽚更换poly = np.array([[(100, h), (500, h), (290, 180), (250, 180)]])mask = np.zeros_like(r_image)# 绘制掩膜图像cv2.fillPoly(mask, poly, 255)# 获得ROI区域masked_image = cv2.bitwise_and(r_image, mask)return masked_imageif __name__ == '__main__':image = cv2.imread('test.jpg')lane_image = np.copy(image)canny = canny()cropped_image = region_of_interest(canny)cv2.imshow("result", cropped_image)cv2.waitKey(0)霍夫变换加线性拟合改良:效果图:代码实现:主要增加了根据斜率作线性拟合过滤⽆⽤点后连线的操作;import cv2import numpy as npdef canny():gray = cv2.cvtColor(lane_image, cv2.COLOR_RGB2GRAY)blur = cv2.GaussianBlur(gray, (5, 5), 0)canny_img = cv2.Canny(blur, 50, 150)return canny_imgdef region_of_interest(r_image):h = r_image.shape[0]w = r_image.shape[1]poly = np.array([[(100, h), (500, h), (280, 180), (250, 180)]])mask = np.zeros_like(r_image)cv2.fillPoly(mask, poly, 255)masked_image = cv2.bitwise_and(r_image, mask)return masked_imagedef get_lines(img_lines):if img_lines is not None:for line in lines:for x1, y1, x2, y2 in line:# 分左右车道k = (y2 - y1) / (x2 - x1)if k < 0:lefts.append(line)else:rights.append(line)def choose_lines(after_lines, slo_th): # 过滤斜率差别较⼤的点slope = [(y2 - y1) / (x2 - x1) for line in after_lines for x1, x2, y1, y2 in line] # 获得斜率数组 while len(after_lines) > 0:mean = np.mean(slope) # 计算平均斜率diff = [abs(s - mean) for s in slope] # 每条线斜率与平均斜率的差距idx = np.argmax(diff) # 找到最⼤斜率的索引if diff[idx] > slo_th: # ⼤于预设的阈值选取slope.pop(idx)after_lines.pop(idx)else:breakreturn after_linesdef clac_edgepoints(points, y_min, y_max):x = [p[0] for p in points]y = [p[1] for p in points]k = np.polyfit(y, x, 1) # 曲线拟合的函数,找到xy的拟合关系斜率func = np.poly1d(k) # 斜率代⼊可以得到⼀个y=kx的函数x_min = int(func(y_min)) # y_min = 325其实是近似找了⼀个x_max = int(func(y_max))return [(x_min, y_min), (x_max, y_max)]if __name__ == '__main__':image = cv2.imread('F:\\A_javaPro\\test.jpg')lane_image = np.copy(image)canny_img = canny()cropped_image = region_of_interest(canny_img)lefts = []rights = []lines = cv2.HoughLinesP(cropped_image, 1, np.pi / 180, 15, np.array([]), minLineLength=40, maxLineGap=20) get_lines(lines) # 分别得到左右车道线的图⽚good_leftlines = choose_lines(lefts, 0.1) # 处理后的点good_rightlines = choose_lines(rights, 0.1)leftpoints = [(x1, y1) for left in good_leftlines for x1, y1, x2, y2 in left]leftpoints = leftpoints + [(x2, y2) for left in good_leftlines for x1, y1, x2, y2 in left]rightpoints = [(x1, y1) for right in good_rightlines for x1, y1, x2, y2 in right]rightpoints = rightpoints + [(x2, y2) for right in good_rightlines for x1, y1, x2, y2 in right]lefttop = clac_edgepoints(leftpoints, 180, image.shape[0]) # 要画左右车道线的端点righttop = clac_edgepoints(rightpoints, 180, image.shape[0])src = np.zeros_like(image)cv2.line(src, lefttop[0], lefttop[1], (255, 255, 0), 7)cv2.line(src, righttop[0], righttop[1], (255, 255, 0), 7)cv2.imshow('line Image', src)src_2 = cv2.addWeighted(image, 0.8, src, 1, 0)cv2.imshow('Finally Image', src_2)cv2.waitKey(0)待改进:代码实⽤性差,⼏乎不能⽤于实际,但是可以作为初学者的练⼿项⽬;斑马线检测思路:获取车前感兴趣区域,判断⽩⾊像素点⽐例即可实现;⾏⼈检测思路:opencv有内置⾏⼈检测函数,基于内置的训练好的数据集;以上就是本⽂的全部内容,希望对⼤家的学习有所帮助,也希望⼤家多多⽀持。
使用Python和OpenCV在道路上找到车道线
识别道路上的车道是所有司机的共同任务,以确保车辆在驾驶时处于车道限制之内,并减少因越过车道而与其他车辆发生碰撞的机会。
对自动驾驶汽车来说,这同样也是一项关键任务。
事实证明,使用计算机视觉技术识别道路上的车道标记是可能的。
本算法将介绍其中的一些技术。
这个项目的目标是创建一种方法,使用Python和OpenCV在道路上找到车道线。
实例图像
Udacity提供了960 x 540像素的示例图像,用于训练我们的算法。
下面是提供的两个图像。
算法步骤
在这一部分中,我们将详细介绍本算法所需的不同步骤,这将使我们能够识别和分类车道线,如下所示:
将原始图像转换为HSL
从HSL图像中分离出黄色和白色
将分离的HSL与原始图像相结合
将图像转换为灰度,便于操作
应用高斯模糊来平滑边缘
在平滑的灰色图像上应用Canny边缘检测
跟踪感兴趣的区域,并剔除其他区域的信息
执行一个霍夫变换,在我们感兴趣的区域内找到车道,并用红色跟踪它们
分开左车道和右车道
插入直线梯度来创建两条平滑的直线
每个步骤的输入都是前一步的输出(例如,我们对区域分割图像应用Hough变换)。
转换到不同的色彩空间
虽然我们的图像目前是RBG格式,但是我们应该探索在不同的颜色空间,如HSL或HSV。
使⽤OpenCV对车道进⾏实时检测的实现⽰例代码项⽬介绍下图中的两条线即为车道:我们的任务就是通过 OpenCV 在⼀段视频(或摄像头)中实时检测出车道并将其标记出来。
其效果如下图所⽰:这⾥使⽤的代码来源于⼤神,此⽂章旨在对其代码进⾏解释。
实现步骤1、将视频的所有帧读取为图⽚;2、创建掩码并应⽤到这些图⽚上;3、图像阈值化;4、⽤霍夫线变换检测车道;5、将车道画到每张图⽚上;6、将所有图⽚合并为视频。
代码实现1、导⼊需要的库import osimport reimport cv2import numpy as npfrom tqdm import notebookimport matplotlib.pyplot as plt其中 tqdm.notebook 是⽤来显⽰进度条的。
2、将图⽚(视频的每⼀帧)加载进来这⾥我们已经将视频的每⼀帧读取为图⽚了,并将它们都放进 frames ⽂件夹。
# 获取帧的⽂件名col_frames = os.listdir('frames/') # 读取 frames ⽂件夹下的所有图⽚col_frames.sort(key=lambda f: int(re.sub('\D', '', f))) # 按名称对图⽚进⾏排序# 加载帧col_images=[]for i in notebook.tqdm(col_frames):img = cv2.imread('frames/'+i)col_images.append(img) # 将所有图⽚添加进 col_images 列表3、选择⼀张图⽚进⾏处理3.1 选定⼀张图⽚# 指定⼀个索引idx = 457# plot frameplt.figure(figsize=(10,10))plt.imshow(col_images[idx][:,:,0], cmap= "gray")plt.show()3.2 创建掩码# 创建0矩阵stencil = np.zeros_like(col_images[idx][:,:,0])# 指定多边形的坐标polygon = np.array([[50,270], [220,160], [360,160], [480,270]])# ⽤1填充多边形cv2.fillConvexPoly(stencil, polygon, 1)# 画出多边形plt.figure(figsize=(10,10))plt.imshow(stencil, cmap= "gray")plt.show()3.3 将掩码应⽤到图⽚上# 应⽤该多边形作为掩码img = cv2.bitwise_and(col_images[idx][:,:,0], col_images[idx][:,:,0], mask=stencil)# 画出掩码后的图⽚plt.figure(figsize=(10,10))plt.imshow(img, cmap= "gray")plt.show()这⾥的按位与操作 cv2.bitwise_and() 可以参考⼀⽂。
基于OpenCV的改进RANSAC车道线检测方法王智宇; 陈光; 陈勇【期刊名称】《《科学技术与工程》》【年(卷),期】2019(019)028【总页数】5页(P222-226)【关键词】车道线检测; 积分图; Harris角点; RANSAC【作者】王智宇; 陈光; 陈勇【作者单位】河北工业大学机械工程学院天津300130【正文语种】中文【中图分类】TP391.4在自动驾驶汽车的视觉系统中,车道检测一直是其重要的一部分[1]。
通过车道线的检测可以定位车辆在车道中的相对位置,为车道偏离报警(lane departure warning, LDW)和车道保持辅助系统(lane keeping aid, LKA)提供数据信息。
随着智能驾驶汽车技术的迅速发展,近几年提出了许多的车道线检测方法。
Dong等[2]利用像素的强度和车道线宽度方向的像素个数生成模板进行匹配来区分车道线和路面。
Kalaki等[3]通过设定包含所在车道的三角形感兴趣区域来减少干扰,使用最大类间方差法二值化,利用Hough变换提取车道线。
Bhujbal等[4]通过将彩色RGB图像转换到YCbCr空间,仅保留Y通道,使用最大类间方差法二值化,把图像分成左右两部分,分别进行边缘检测和Hough变换提取车道线。
Yasin等[5]通过将图像二值化后转化成鸟瞰图,使用Soble算子检测边缘,再用二次曲线拟合车道线。
Jun等[6]通过具有车道线位置和方向属性的模板来确定候选区域,再用RANSAC(random sample consensus)方法进行车道线拟合。
上述基于视觉传感器的车道线检测方法可以分为基于边缘特征的方法和基于模版匹配的方法两大类。
路面的信息复杂多变,积水、车辆阴影和树木阴影对边缘特征有很大的挑战。
车辆在道路中的行驶位置对模板匹配方法有重大影响。
光照强度严重影响图像二值化效果。
为解决上述问题,现提出一种改进RANSAC的车道线检测方法。
车道线检测—python_opencv代码解读 1#!D:/Code/python2# -*- coding: utf-8 -*-3# @Time : 2019/8/29 16:584# @Author : Johnye5# @Site :6# @File : detect_RoadL.py7# @Software: PyCharm89import cv2 as cv10import numpy as np11import math1213# LaneLineDetection类14# 通过对象封装,将其中的重要函数隔离开15class LaneLineDetection:16def__init__(self):17print("instace it")18# leftline 和rightline车道检测的两条线19# 每⼀条线分别有两个点决定20 self.left_line = {'x1': 0, 'y1': 0, 'x2': 0, 'y2': 0}21 self.right_line = {'x1': 0, 'y1': 0, 'x2': 0, 'y2': 0}2223def process(self, frame, method=0):24# 将图像转化为灰度图像25 gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY)26# canny边缘检测27 binary = cv.Canny(gray, 150, 300)28 h, w = gray.shape29# 这⼀步操作没看懂30 binary[0:np.int(h/2+40),0:w] = 031# 轮廓查找32 contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)33# 创建输出⽤的空⽩图像34 out_image = np.zeros((h, w), frame.dtype)35# 遍历每⼀个轮廓,进⾏轮廓分析36for cnt in range(len(contours)):37# 通过多种特征筛选38 p = cv.arcLength(contours[cnt], True)39# 计算轮廓⾯积40 area = cv.contourArea(contours[cnt])41# 获取轮廓的中⼼坐标以及长、宽42 x, y, rw, rh = cv.boundingRect(contours[cnt])43if p < 5 or area < 10:44continue45if y > (h - 50):46continue47# 计算最⼩外接矩形⾓度48 (x, y), (a, b), angle = cv.minAreaRect(contours[cnt]);49 angle = abs(angle)50# 筛选标准⾓度不能⼩于20或者⼤于90度或者等于90度,剔除51if angle < 20 or angle > 160 or angle == 90.0:52continue53# contour的长度⼤于554if len(contours[cnt]) > 5:55# 椭圆拟合56 (x, y), (a, b), degree = cv.fitEllipse(contours[cnt])57# 椭圆的⾓度⼩于5 或者⾓度⼤于160 或者⾓度在80和160之间,剔除58if degree< 5 or degree>160 or 80<degree<100:59continue60# 不被以上的条件剔除的,在创建的空⽩图像上绘制该轮廓61 cv.drawContours(out_image, contours, cnt, (255), 2, 8)62 result = self.fitLines(out_image)63 cv.imshow("contours", out_image)64 dst = cv.addWeighted(frame, 0.8, result, 0.5, 0)65 cv.imshow("lane-lines", dst)66# 直线拟合67def fitLines(self, image):68 h, w = image.shape69 h1 = np.int(h / 2 + 40)70 out = np.zeros((h, w, 3), dtype=np.uint8)71 cx = w // 272 cy = h // 273 left_pts = []74 right_pts = []75for col in range(100, cx, 1):76for row in range(cy, h, 1):77 pv = image[row, col]78if pv == 255:79 left_pts.append((col, row))80for col in range(cx, w-20, 1):81for row in range(cy, h, 1):82 pv = image[row, col]83if pv == 255:84 right_pts.append((col, row))85# 检测出的左车道线数量⼤于286if len(left_pts) >= 2:87 [vx, vy, x, y] = cv.fitLine(np.array(left_pts), cv.DIST_L1, 0, 0.01, 0.01)88 y1 = int((-x * vy / vx) + y)89 y2 = int(((w - x) * vy / vx) + y)90 dy = y2 - y191 dx = w - 192 k = dy/dx93 c = y19495 w1 = (h1 -c)/k96 w2 = (h - c) / k97 cv.line(out, (np.int(w1), np.int(h1)), (np.int(w2), np.int(h)), (0, 0, 255), 8, 8, 0)98 self.left_line['x1'] = np.int(w1)99 self.left_line['y1'] = np.int(h1)100 self.left_line['x2'] = np.int(w2)101 self.left_line['y2'] = np.int(h)102# 检测出的左车道线数量为1103else:104 x1 = self.left_line['x1']105 y1 = self.left_line['y1']106 x2 = self.left_line['x2']107 y2 = self.left_line['y2']108 cv.line(out, (x1, y1), (x2, y2), (0, 0, 255), 8, 8, 0)109# 检测出的右车道线数量⼤于2110if len(right_pts) >= 2:111 x1, y1 = right_pts[0]112 x2, y2 = right_pts[len(right_pts) - 1]113 dy = y2 - y1114 dx = x2 - x1115 k = dy / dx116 c = y1 - k * x1117 w1 = (h1 - c) / k118 w2 = (h - c)/k119 cv.line(out, (np.int(w1), np.int(h1)), (np.int(w2), np.int(h)), (0, 0, 255), 8, 8, 0) 120 self.right_line['x1'] = np.int(w1)121 self.right_line['y1'] = np.int(h1)122 self.right_line['x2'] = np.int(w2)123 self.right_line['y2'] = np.int(h)124# 检测出的右车道线数量为1125else:126 x1 = self.right_line['x1']127 y1 = self.right_line['y1']128 x2 = self.right_line['x2']129 y2 = self.right_line['y2']130 cv.line(out, (x1, y1), (x2, y2), (0, 0, 255), 8, 8, 0)131return out132133134def video_run():135 capture = cv.VideoCapture("images/road_line.mp4")136 height = capture.get(cv.CAP_PROP_FRAME_HEIGHT)137 width = capture.get(cv.CAP_PROP_FRAME_WIDTH)138 count = capture.get(cv.CAP_PROP_FRAME_COUNT)139 fps = capture.get(cv.CAP_PROP_FPS)140print(height, width, count, fps)141 detector = LaneLineDetection()142while (True):143 ret, frame = capture.read()144if ret is True:145 cv.imshow("video-input", frame)146 detector.process(frame, 0)147 c = cv.waitKey(1)148if c == 27:149break150else:151break152153154if__name__ == "__main__":155 video_run()156 cv.waitKey(0)157 cv.destroyAllWindows()。
OpenCV-Python:车道检测任务:⼀共要完成两项任务:1. 在所提供的公路图⽚上检测出车道线并标记2. 在所提供的公路视频上检测出车道线并标记⽅案:要检测出当前车道,就是要检测出左右两条车道直线。
由于⽆⼈车⼀直保持在当前车道,那么⽆⼈车上的相机拍摄视频中,车道线的位置应该基本固定在某⼀个范围内:如果我们⼿动把这部分ROI区域抠出来,就会排除⼤部分⼲扰。
接下来检测直线肯定⽤霍夫变换,但ROI区域内的边缘直线信息还是很多,考虑到只有左右两条车道,⼀条斜率为正、⼀条斜率为负,可将所有的线分为两组,每组再通过均值或最⼩⼆乘法拟合的⽅式确定唯⼀⼀条线就可以完成检测。
具体步骤如下:1. 灰度化2. ⾼斯模糊3. Canny边缘检测4. 不规则ROI区域截取5. 霍夫直线检测6. 车道计算对于视频来说,只要能检测出⼀幅图,后⾯将图像合成⼀下即可。
灰度化和滤波操作是⼤部分图像处理的必要步骤。
灰度化是因为不需要⾊彩信息,可以减少计算量。
⽽滤波会削弱图像噪点,排除⼲扰信息。
另外,边缘提取是基于图像梯度的,梯度对噪声很敏感,所以平滑操作必不可少。
这⾥我们⽤分模块来写,⽅便调⽤:import cv2import numpy as np# ⾼斯滤波核⼤⼩blur_ksize = 5# Canny边缘检测⾼低阈值canny_lth = 50canny_hth = 150def process_an_image(img):# 1. 灰度化、滤波和Cannygray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)blur_gray = cv2.GaussianBlur(gray, (blur_ksize, blur_ksize), 1)edges = cv2.Canny(blur_gray, canny_lth, canny_hth)if __name__ == "__main__":img = cv2.imread('test_pictures/lane.jpg')result = process_an_image(img)cv2.imshow("lane", np.hstack((img, result)))cv2.waitKey(0)边缘检测结果图ROI按前⾯⽅案中提到的,只需保留边缘图中红线部分区域⽤于后续的霍夫直线检测,其余的都是⽆⽤的信息:我们可以穿件⼀个梯形的掩膜,然后与边缘检测结果图混合运算,掩膜中⽩⾊部分保留,⿊⾊部分舍弃。
OpenCV车道线检测原理详解1. 背景介绍车道线检测是计算机视觉中的一个重要应用领域,它在自动驾驶、交通监控和智能驾驶辅助系统中起着关键作用。
OpenCV是一个广泛使用的计算机视觉库,提供了丰富的图像处理和分析工具,包括车道线检测。
2. 基本原理OpenCV车道线检测基于计算机视觉技术,主要通过以下步骤实现:2.1 图像预处理首先,需要对输入图像进行预处理以提取车道线的特征。
常见的预处理步骤包括:- 图像灰度化:将彩色图像转换为灰度图像,简化后续处理步骤。
- 高斯模糊:对灰度图像进行高斯滤波以减少噪声。
- 边缘检测:使用Canny边缘检测算法提取图像中的边缘。
2.2 区域选择在车道线检测中,我们通常只关注图像中感兴趣的区域,即前方道路上可能存在车道线的区域。
因此,需要通过区域选择来限制车道线检测的范围。
常见的区域选择方法是使用多边形来定义一个感兴趣区域,通常是一个梯形或矩形。
2.3 霍夫变换接下来,使用霍夫变换来检测图像中的直线。
霍夫变换是一种通过在参数空间中累加满足特定几何形状条件的点来检测这些几何形状的方法。
在车道线检测中,我们可以使用霍夫直线变换来检测图像中的直线。
2.4 直线筛选由于霍夫变换会产生大量的直线候选项,因此需要进行筛选以找到真正表示车道线的直线。
常见的筛选方法包括: - 斜率过滤:根据斜率阈值排除不符合要求的直线。
- 区域过滤:根据直线是否在感兴趣区域内进行筛选。
2.5 直线拟合最后,对筛选后的直线进行拟合以获得车道线模型。
常见的拟合方法是使用最小二乘法对直线进行拟合,得到车道线斜率和截距。
3. 示例代码import cv2import numpy as npdef lane_detection(image):# 图像预处理gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)blurred = cv2.GaussianBlur(gray, (5, 5), 0)edges = cv2.Canny(blurred, 50, 150)# 区域选择height, width = edges.shaperoi_vertices = np.array([[(0, height), (width / 2, height / 2), (width, he ight)]], dtype=np.int32)masked_edges = region_of_interest(edges, roi_vertices)# 霍夫变换lines = cv2.HoughLinesP(masked_edges, rho=1, theta=np.pi/180,threshold=50, minLineLength=100, maxLineGap=50)# 直线筛选filtered_lines = filter_lines(lines)# 直线拟合lane_lines = fit_lines(filtered_lines)# 绘制车道线result = draw_lane_lines(image, lane_lines)return resultdef region_of_interest(img, vertices):mask = np.zeros_like(img)cv2.fillPoly(mask, vertices, 255)def filter_lines(lines):# 实现直线筛选逻辑,根据斜率和区域进行筛选def fit_lines(lines):# 实现直线拟合逻辑,使用最小二乘法进行拟合def draw_lane_lines(img, lines):# 绘制车道线到原图像上# 车道线检测主流程image = cv2.imread('lane_image.jpg')result = lane_detection(image)cv2.imshow('Lane Detection', result)cv2.waitKey(0)cv2.destroyAllWindows()4. 总结OpenCV车道线检测基于计算机视觉技术,通过图像预处理、区域选择、霍夫变换、直线筛选和直线拟合等步骤来实现。