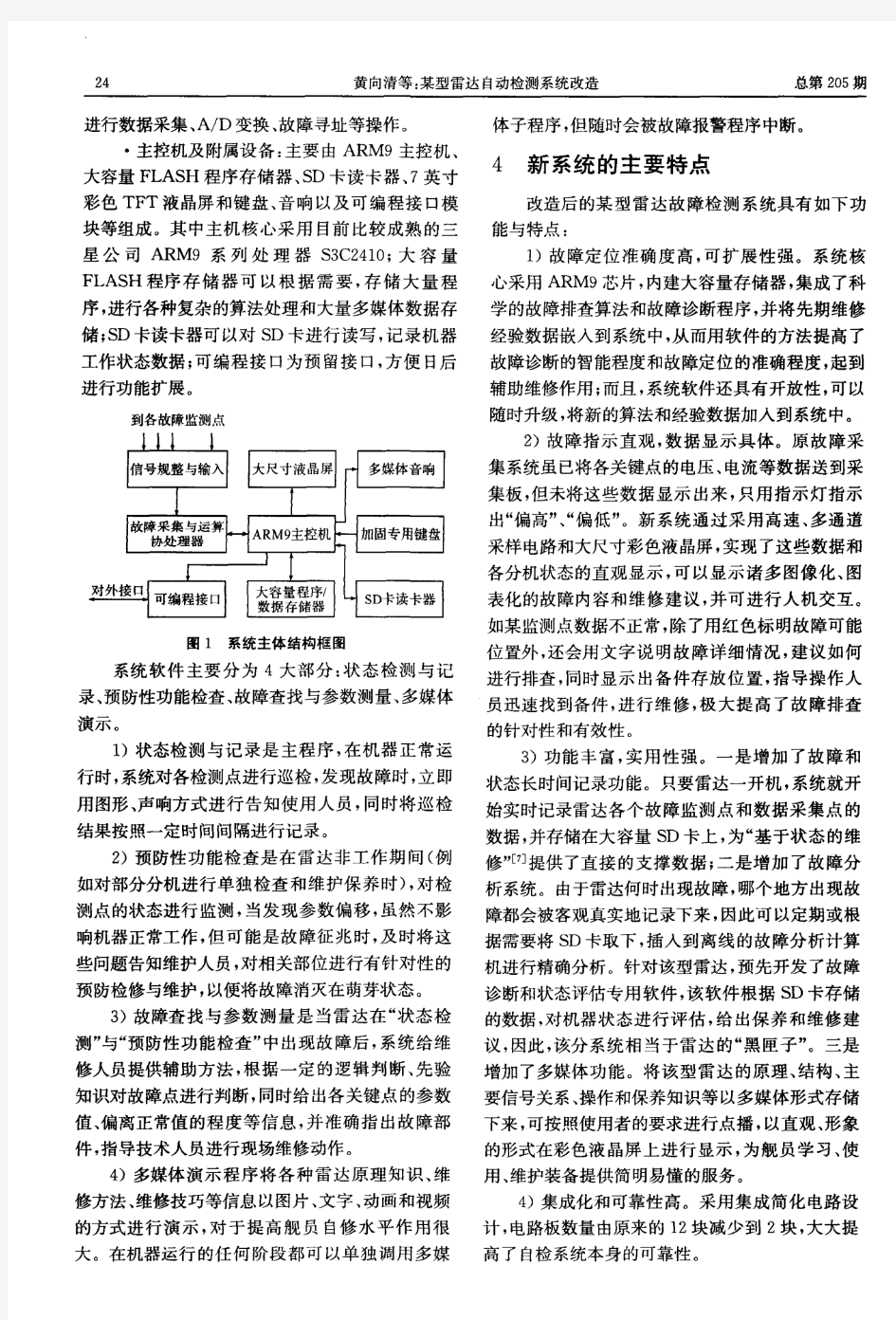
智能雷达光电探测监视系统单点基本方案
一、 系统概述
根据监控需求: 岸基对海 3~10 公里范围内主要大小批量目标; 主动雷达光电探测和识别; 多目标闯入和离去自动报警智能职守; 系统接入指挥中心进行远程监控管理; 目标海图显示管理; 系统能够自动发现可疑目标、跟踪锁定侵入目标、根据设定条件进行驱散、 同时自动生成事件报告记录,可以实现事故发生后的事件追溯,协助事故调查。 1. 项目建设主要目的 ? 为监控区域安全提供综合性的早期预警信息; ? 通过综合化监测提高处置和应对紧急突发事件的指挥能力。 2. 基本需求分析: 需配置全自动、全量程具备远距离小目标智能雷达探测监视和光电识别系 统,系统具备多目标自动持续稳定跟踪、多种智能报警功能、支持雷达视频实 时存储、支持留查取证的雷达视频联动回放功能等;同时后期系统需具备根据 用户需求的功能完善二次开发能力。同时支持后续相关功能、扩点组网应用需 求。 根据需求和建设主要目的,选型国际同类技术先进水平,拥有相关技术自 主知识产权,具备二次技术深化开发的北京海兰信数据科技股份有限公司 (2001 年成立,2010 年国内创业板上市,股票代码:300065,致力于航海智 能化与海洋防务/信息化的国内唯一上市企业)的智能监视雷达光电系统。该系 统在国内外有众多海事相关成熟应用案例,熟悉国内海事、海监、海警、渔政
公务执法及救捞业务需求特点等。同时,该系统近期成功中标国内近年来相关 领域多套(20 套)雷达光电组网项目,充分说明该系统的技术领先及成熟应 用的市场广泛接受度。
3. 项目建成后的主要特点 ? 全天候、全覆盖、全自动的立体化监控。该系统具备对多传感器信息 融合的能力,确保对探测范围内雷达信息源、光电、AIS、GPS 等设备信号源 进行有机的融合和整合。 ? 系统具备了预警、报警、实时录取回放的综合功能。任何目标物进入 雷达视距时,系统即开始进行监测。目标物触碰警报规则后,指挥室获得报警 信号,同时联动设备综合光电锁定警报目标,以便驱离。整个过程系统实时记 录、方便随时调用回放。 ? 系统技术水平国内领先。该系统中创新地采用了国际先进的“先跟踪 后探测”算法技术对目标进行探测和跟踪,保证了在严苛条件下满足对目标地 探测与持续跟踪能力。 ? 该系统采用先进的设计思想,开放灵活的系统网络架构,能够根据需 求进行不同的组合和配置,系统可扩展性强。 ? 维护便捷,由于采用网络架构,获得用户授权后能连接到用户网络, 可以远程支援维修维护系统,从而提高维护效率,减少维护成本。 ? 可靠性高,充分适应不同的海洋环境。
二、 系统设备清单
序号 1
2
材料名称
规格型号
X 波段雷达,IP65(含安装支架) HLD800/900;8ft,25kw
小目标雷达数据处理器及显示 HLD-STTD-1000
终端软件
Radpro V1.6.0.0
数量 1套
1套
雷达的目标识别技术 摘要: 对雷达自动目标识别技术和雷达目标识别过程进行了简要回顾,研究了相控阵雷达系统中多目标跟踪识别的重复检测问题提出了角度相关区算法,分析了实现中的若干问题,通过在相控阵雷达地址系统中进行的地址实验和结果分析表明:采用角度相关区算法对重复检测的回波数据进行处理时将使识别的目标信息更精确从而能更早地形成稳定的航迹达到对目标的准确识别。 一.引言 随着科学技术的发展,雷达目标识别技术越来越引起人们的广泛关注,在国防及未来战争中扮演着重要角色。地面雷达目标识别技术目前主要有-Se方式,分别是一维距离成象技术、极化成象技术和目标振动声音频谱识别技术。 1.一维距离成象技术 一维距离成象技术是将合成孔径雷达中的距离成象技术应用于地面雷达。信号带宽与时间分辨率成反比。例如一尖脉冲信号经过一窄带滤波器后宽度变宽、时间模糊变大。其基本原理如图1所示。 2.极化成象技术 电磁波是由电场和磁场组成的。若电场方向是固定的,例如为水
平方向或垂直方向,则叫做线性极化电磁波。线性极化电磁波的反射与目标的形状密切相关。当目标长尺寸的方向与电场的方向一致时,反射系数增大,反之减小。根据这一特征,向目标发射不同极化方向的线性极化电磁波,分别接收它们反射(散射)的回波。通过计算目标散射矩阵便可以识别目标的形状。该方法对复杂形状的目标识别很困难。 3.目标振动声音频谱识别技术 根据多普勒原理,目标的振动、旋转翼旋转将引起发射电磁波的频率移动。通过解调反射电磁波的频率调制,复现目标振动频谱。根据目标振动频谱进行目标识别。 传统上我国地面雷达主要通过两个方面进行目标识别:回波宽度和波色图。点状目标的回波宽度等于入射波宽度。一定尺寸的目标将展宽回波宽度,其回波宽度变化量正比于目标尺寸。通过目标回波宽度的变化可估计目标的大小。目标往往有不同的强反射点,如飞机的机尾、机头、机翼以及机群内各飞机等,往往会在回波上形成不同形状的子峰,如图2所示。 这类波型图叫作波色图。根据波色图内子峰的形状,可获得一些目标信息。熟练的操作员根据回波宽度变化和波色图内子峰形状,进行目标识别。
近年来随着经济的迅速发展和人口的不断增长,我国的突发性事故时有发生,如化学危险品库燃烧大爆炸;装载剧毒农药车辆翻车造成农药泄露;又或者是什么地方又开始发生洪灾什么等等。这类事故发生突然,破坏性大,直接关系到生命安全,这已成为当今社会不可忽视的问题,引起政府各个部门高度重视。 河道水库监测终端对河道或水库的水、雨情进行全天候在线监测;监测中心应用软件对相关数据进行快速的分析和处理,并无缝对接山洪灾害预警信息发布平台。河道、水库的水位、雨量监测系统对该地的防洪减灾工作意义重大,并起到了很好的示范作用。目前,该系统已在全国范围内得到了全面的推广和应用。 据了解,水文信息采集系统是目前我国很多城市排水防涝数字化管控平台的重要组成部分,也是整个项目信息采集、传输、接收、存储、分发、上报的最基础环节。 水文监测设施设备的主要功能是,通过相应水情监测设施和水情传感器,实现对各种水情信息的现场检测,水文信息监测主要包括:降水量、水位、流量、水质等。 一般来说,防汛水位监测会采用水文信息采集系统建设会在城市多处安装自动水位站、超声波、雷达水位计等警示装置,并通过GPRS 模块无线传输的方式,与中心站联网通信,实现对水位的自动采集。
HZ-SVR-24Q雷达流量计 航征科技是目前国内具有自主知识产权的雷达方案提供商,拥有多项专利和软件著作权。航征面向水文、水利、环境保护、城市排水管网等行业用户,提供雷达流速流量在线监测解决方案。航征分别在上海、无锡建立了运营和研发测试中心,拥有完整的技术研发体系和阵容强大的科研队伍,与清华大学、国防科技大学、上海交通大学等知名院校达成长期战略合作,有多位业内专家作为公司的技术后盾,立志成为全球优秀的智能传感解决方案提供商。
31 自动跟踪 本章介绍了跟踪检测目标的技术。使用雷达硬件和雷达信号处理实现跟踪,从而形成一个闭环系统。单目标跟踪(STT)和边跟踪边扫描(TWS)模式(在第2章中介绍)被检验。在我们考虑跟踪测量和方法之前,我们需要定义一些术语。 估计,准确性和精确度通常用于描述跟踪的不同方面。估算应用于任何参数的值,该参数的值(1)仅在与腐蚀干扰相结合时才能测量,例如热噪声(图31-1);(2)不能直接测量,例如基于一系列距离测量的距离速率。 根据该定义,雷达系统测量或计算的每个参数,无论多么精确,都是估计值。 接下来,区分两个重要参数:准确度和精度。通常,两者都指数量的测量,其在跟踪中包括目标参数,例如真实范围,速度和方位。因此,测量值表示雷达系统对目标的真实参数的估计。 准确度表示测量值与真实值的接近程度,而精度表示在同一参数的多个测量值中存在多少可变性。它们共同构成了雷达系统对真实目标参数进行估算的基础。图31-2显示了一个示例,其中准确度和精度可以看作非常不同并且(有时)彼此独立。跟踪雷达的目标是具有高准确度和高精度。
跟踪中使用的另一个术语是判别式,其量化测量函数的校准。它通常由执行测量的硬件或软件输出与跟踪误差的真实值的关系图表示(图31-3)。曲线的线性部分的斜率是判别式并且确定测量的灵敏度。通常,斜率随着信噪比的增加而增加。 判别式的一个重要特征是它们通常是归一化的,因此无量纲。因此,不一定需要精确测量电压或功率电平。此外,除了信噪比的影响之外,跟踪误差的测量值不随信号强度而变化。它们与目标的大小,范围,机动和雷达截面(RCS)波动无关。如果需要,可以通过将判别式乘以预先计算的常数来给出判别式。在整个跟踪过程中使用判别式,其目的是改进目标测量参数的估计,例如距离,多普勒,仰角和方位角。 31.1 单目标跟踪 单目标跟踪可提供有关目标位置,速度和加速度的连续且准确的当
49642009,30(21)计算机工程与设计Computer Engineering and Design 0引言 复杂背景下低信噪比运动目标的检测和跟踪是雷达信号处理系统的关键技术之一。在微弱运动目标检测和跟踪的应用中,雷达接收的远距离目标回波强度非常弱,信噪比很低,目标易被噪声淹没,单个脉冲回波的信噪比甚至是负的,若仅对单帧图像处理,不能可靠地检测目标。在预警雷达应用中,由于运动目标距离雷达较远,又处在强杂波环境中,对微弱运动目标的检测与跟踪是雷达信号处理的一个重要课题。早期算法主要有Kalman滤波等方法,主要采用检测后跟踪(detect before track,DBT)方法,这类方法在信噪比较高时可以取得很好的效果,否则不能检测出目标。要想对微弱目标进行有效的检测及跟踪,除了抑制杂波和降低系统噪声等方法外,一种有效的方法是检测前跟踪(track before detect,TBD)方法,即对单次观测信号先不进行判断,而是结合雷达图像特点,对目标进行多次观测,计算出目标在各帧图像之间的移动规律,预测目标在下一帧图像的可能位置,同时在帧与帧之间将多次扫描得到的数据沿着预测轨迹进行几乎没有信息损失的相关处理,从而改善目标的信噪比,提高检测性能,在得到检测结果的同时获得目标航迹。 目前,用于微弱目标检测的TBD方法主要有极大似然法、粒子滤波法、动态规划(dynamic programming,DP)法、Hough变换法,等[1-2]。其中,Hough变换法对检测沿径向做匀速直线运动的目标具有较好的检测性能,目标在直线轨迹上的能量集中在Hough变换后的单点上,目标轨迹的能量远大于其它点的能量,但计算量和存储量都较大[3],难以实现。动态规划算法对目标信噪比要求较低,可以探测各种运动形式的目标[4-5]。 动态规划算法是美国Y.Barniv于1985年提出的,利用动态规划的分段优化思想,将目标轨迹搜索问题分解为分级优化的问题[6]。将其应用到雷达微弱目标检测中,可将雷达回波信号在多普勒频率和距离二维方向的幅度排列成图像,在多帧相继的图像序列中,运动目标轨迹可看作是一条连续变化的曲线,利用动态规划算法,检测是否存在着这样一条曲线,从而判断目标是否存在。 基于动态规划的检测前跟踪的关键在于沿目标运动航迹积累能量[7-8],可以看出,搜索目标航迹的计算量非常大,在实际应用中存在不足。在预警雷达中,来袭目标比远离雷达的目标更具有威胁性,更需早期发现和预防,所以单独针对来袭目标进行探测,可以大大减少动态规划法搜索的运算量,提高预警雷达的探测能力。本文针对动态规划算法计算量大的缺 收稿日期:2009-02-26;修订日期:2009-06-10。
非均匀空时自适应处理 摘要 本文首先依次介绍了在非均匀环境下的STAP处理法,包括降维、降秩以及LSMI方法,接着重点分析了直接数据域(DDD)方法的原理及实现过程,最后针对直接数据域方法进行了仿真实验。 引言 机载雷达对运动目标检测时, 面临的主要问题是如何抑制强大的地面杂波和各种类型的干扰,空时自适应处理(STAP)是解决该问题的关键技术。STAP 技术通过对杂波或干扰训练样本分布特性的实时学习来来形成空域—时域二维自适应权值,实现对机载雷达杂波和干扰的有效抑制。 STAP技术在形成自适应权值时,需要计算杂波协方差矩阵R。实际系统的协方差矩阵是估计得到的,即先在待检测距离单元的临近单元测得K个二维数 据矢量样本V i(i=1,2…K),再计算R的估计值?=Σ i=1K V i V i H∕K,然后可得自 适应权值W=μR^-1S,其中μ为常数,S为空时导向矢量。临近训练样本的选择必须满足独立同分布(IID)条件。同时,为了使由杂波协方差矩阵估计引起的性能损失控制在3dB内,要求均匀训练样本数K至少要2倍于其系统自由度(DOF)。如果所选样本非均匀,则形成的权值无法有效对消待检测单元中所含有的杂波和干扰,从而大大降低对运动目标的检测性能。 在实际应用中, 机载雷达面临的杂波环境往往是非均匀的, 这对经典的S T A P 技术带来了极大的挑战。针对这一难题, 许多新的适用于非均匀杂波环境的S T A P 方法不断被提出。 1、解决非均匀样本的方法 1.1、降维方法 降维方法的最初目的是为了减少空时自适应处理时所需的巨大运算量, 但后来发现该类方法同时大大减少了对均匀训练样本数的需求, 对非均匀情况下杂波抑制起到了积极的作用。降维方法将每次自适应处理所需要抑制的杂波范围限制在某一个较小杂波子空间内, 根据RMB准则和Brennan定理, 自适应处理时所需要的均匀训练样本数由2 倍于整体系统自由度减至降维后2 倍于子空间系统自由度。降维程度越高, 对均匀训练样本的需求就越少。降维方法属固定结构方法, 无法充分利用杂波的统计特性。当辅助波束与杂波谱匹配很好时, 处理性能往往很好。反之, 则性能下降。 1.2、降秩方法 与固定结构降维方法相反, 降秩方法充分利用回波中杂波的分布特性, 每次处理选取完备杂波空间来形成自适应权值对消杂波分量, 可看作依赖回波数据的自适应降维方法。该类方法在形成权值过程中利用的信息中不含噪声分量, 所以避免了小样本情况下噪声发散带来的性能下降问题, 故减少了对均匀训练样本数的需求。同样, 该类方法在满足信杂噪比损失不超过 3 d B 条件时所需的训练样本数约为 2 倍的杂波子空间的维数。从处理器结构上来看, 降秩方法可
机场跑道异物(FOD)雷达检测系统(Foreign Object Debris radar Detection system) ●研发背景 ●对FOD雷达检测系统的要求 ●赛英公司与研发团队简介 ●赛英产品的技术特点 ●赛英产品与国外同类产品比较 ●赛英产品的工作流程 赛英科技 2010.6.8
一、研发背景简介 机场跑道异物(FOD)泛指可能损伤飞机的某种外来物质。FOD会危及飞机和乘客的生命,造成航班延误、中断起飞,引起巨大的经济损失。据保守估计,每年全球因FOD造成的直接损失至少在30亿—40亿美元。而间接损失是这个数字的4倍!我国民航局机场司2009年出版的【FOD防手册】指出:从2007年5月到2008年5月,FOD损伤飞机轮胎的事件在我国有4500起! 2000年7月25日,法航一架协和式客机从法国巴黎戴高乐机场起飞,两分钟后随即坠毁,共有113 人遇难,法航向遇难家属赔偿约1.3亿美元。这次事件的罪魁祸首就是FOD——跑道上的一块45公分长的金属条,这也是史上FOD造成的最大空难。 协和悲剧发生后,FOD探测系统的研究与开发提上日程,2006年12月,加拿大温哥华机场安装了Tarsier FOD监测雷达,成为全球安装FOD 监测系统的第一个民航机场。现在,欧美国家的一些大型民航机场已经陆续安装FOD监测系统。 在我国,既没有引进这种系统的机场,也没有研发这种系统的报道。我国机场对FOD的监测都是靠人工定时巡视,靠人眼近距离搜寻,这种落后的方法效率低,可靠性差,而且大大占用了宝贵的跑道使用时间,使航班次数被迫减少。因此,研发具有自主知识产权的国产FOD监测系统是我国航空业的当务之急,航管业界称之为雪中送炭。国产FOD监测雷达的问世必将产生巨大的社会和经济效益。
智能雷达检测系统方案 XXXX科技开发有限公司 2014年6月
目录 1概述 (1) 2系统特点 (1) 3系统原理 (1) 4与传统微波车检的区别 (2) 5系统构成 (2) 5.1单雷达系统 (2) 5.2多雷达系统 (3) 6系统性能及技术指标 (4) 7安装布局 (5) 7.1安装在高速路路侧 (5) 7.2安装在收费站 (6) 7.3安装在十字路口 (6) 7.4灵活的安装高度 (7) 8选型 (8)
1、概述 随着社会的发展和人们生活需求的提高,车辆数量日益增多并且多样化,交通问题越来越重要。在道路交通管理过程中,车流信息是决定控制策略的关键因素之一。因此更加精确地、多类型地采集车辆信息日益显示出其重要性,从而实现交通智能化,最终实现道路资源的高效利用,本文介绍的是来自德国的一款全新概念的智能检测雷达。 2、系统特点 ?精确测量每个对象的位置和速度; ?具有跟踪和分类功能,同时测量多个物体(卡车,汽车,自行车,行人 等); ?同时可检测4车道(或更多),最长达300米的范围; ?300公里/小时以内,速度可精确测量; ?灵活的安装:在公路旁、交叉口,在桅杆臂或横跨道路的门架; ?测量每车道和多车辆信息,占用率,速度,间距等; ?上电自校准和诊断; ?全天候运转; ?灵活小巧,重量轻; ?免维护; ?四天线设计,通信更稳定可靠; ?可选择多种接口通信。 3、系统原理 基本原理是应用‘多普勒效应’, 利用持续不断发射出电波的装置,当无线电波在行进的过程中, 碰到物体时被反射, 而且其反弹回来的电波波长会随着所碰到的物体的移动状态而改变. 经由计算之后, 便可得知该物体与雷达之间相对移动速度。 若无线电波所碰到的物体是固定不动的, 那么所反弹回来的无线电波其波长是不会改变的. 但若物体是朝着无线电线发射的方向前进时, 此时所反弹回来的无线电波其波长会发生变化, 借于反弹回来的无浅电波波长所产生的变化,
测速抓拍系统 设 计 方 案 沈阳腾翔科技有限公司
一、概述 1.1前言 近年来,随着城市机动车数量的不断增长,在带来诸多便利的同时,也存在着一些问题。车辆违法行为层出不穷,交通事故频频发生,都给城市交通管理造成了一定的难度。在“向科技要警力、向科技要效率”的今天,充分利用高科技手段,开发和研制出可以纠正遏制交通违法行为,有效实现交通管理,提高交通运输效率的产品显的十分必要。目前国内外虽有类似产品先后被研发出并面世,但都或多或少存在着不足之处。产品大多采取标清摄像机加视频采集卡的方式实现对违法车辆的记录,虽然价格低廉,但稳定性欠缺,故障率较高,增加了维护成本和工作量。国外产品较为稳定,但功能相对比较单一,价格十分昂贵,不适宜全面推广,大多只应用在一些要求非常严格的高端智能测速抓拍领域。 针对上述情况,公司推出了新一代窄波高清一体化测速抓拍取证系统。它相对第一代测速仪有了很大的改进,像素200万、500万可选,采取触摸屏操作,操作简便明了。同时二代测速系统设计更加简单轻便,更加灵活,并且增加了一些智能调节功能。该系统紧密结合公安业务需求,综合吸收了国内外产品的优点,采用全嵌入式结构,系统稳定可靠、功能强大、安装方便,适宜全面推广。系统的设计还充分利用了公司在安防监控行业的技术优势,实现了安防监控与智能交通的完美结合,随着该系统的推出,将真正的解放警力,提高交警的工作效率,实现“科技强警”。 1.2设计依据 1.《中华人民共和国道路交通安全法》 2.《中华人民共和国道路交通安全法实施条例》 3.《公路交通安全实施设计技术规范》 (JTJ074-2003) 4.《公路车辆智能监测记录系统通用技术条件》( GA/T497-2009) 5.《公安交通指挥系统工程建设通用程序和要求》(GA/T651-2006) 6.《公安交通管理外场设备基础施工通用要求》(GA/T652-2006) 7.《公安交通指挥系统工程设计制图规范》(GA/T515-2004) 8.《安全防范工程技术规范》(GB50348—2004)
?雷达信号的模拟 大功率信号,低相噪信号 宽带信号, 相参信号 ?雷达信号的分析 ?矢量分析 ?脉冲参数分析 ?脉冲相噪测试 ?脉冲器件寄生相噪测试 ?数字相控阵系统测试 ?模块级(T/R组件)测试 ? Agilent Technologies, Inc. 2009 2
对目标方位的确定多卜勒频移效应 f d= 2 * v r/ λc 对目标速度的确定 相控阵雷达 ?功率合成,实现大的功率孔径乘积 ?系统效率高,可获得很高的发射信号功率 ?简化复杂的馈线系统设计,改善了发射天线的体积和重量 ?通过电扫描完成波束扫描,波束扫描速度快 ?波束的成形控制 ?系统的多功能,实现频谱共享阵面和综合化电子系统 ?提高电子对抗能力 ?稳定性提高,T/R组件5%损坏时,系统仍能工作。
全数字式相控阵雷达 ?数字T/R模块:包含微波电路,数字电路,时钟电路和光电路的复杂系统?数字波束合成 ?大容量高速数据传输技术 ?高性能信号处理机 ?雷达信号的模拟 ?雷达信号的分析 ?模块级(T/R组件)测试 ? Agilent Technologies, Inc. 2009 6
替换 信号类型测试应用技术要求 正弦波信号替代系统本振,ADC等电路性能测试功率,频率精度,相位噪声 调制信号测试接收机或关键部件性能功率,频率精度,调制带宽,调制能力,调制精度失真信号测试接收机或关键处理器性能信号带宽,失真处理能力,信号幅度精度 基带信号测试模拟或数字基带电路性能模拟IQ,数字IQ 信号输出能力。数字接口形式,速率 备注 具有一定相关性的两路信号同时发射。两路信号的 双路信号具有定相关性的两路信号同时发射。两路信号的 PRI和载波频率可以相同也可不同。 用户反侦察积抗干扰信号 脉冲压缩信号具备很大的时宽带宽积。包含线性调频,非线性调频 信号,二相编码信号,多相编码信号和频率编码信号。用于预警雷达和高分辨力雷达
雷达故障自动检测系统 李更祥 (中国航天科工集团公司二院23所,北京 100854) 摘要:本文介绍了雷达故障自动检测系统设计。对雷达故障自动检测系统提出了总体设计任务和目标、构成、功能、性能、技术指标。对雷达自动检测系统硬件设计、软件需求分析、软件概要设计、详细设计的具体内容做了较详细的设计说明和要求。 关键词:雷达;计算机;自动检测;故障 1 引言 随着武器装备的现代化、电子产品的高科技化和复杂化,计算机硬件、软件及信息综合处理的快速化,这些特点在现代雷达技术中的应用非常突出,现代战争实际上就是高科技综合技术的对抗战,谁拥有快速反应、能持续保持战斗力的武器装备,谁就占有取得战争胜利的主动权。雷达综合保障体系的一切工作是为了提高雷达平均无故障工作时间。雷达故障自动检测系统是为了对雷达快速、准确、隔离故障到可更换单元(LRU),以便快速维修,达到降低雷达修复时间的目的,先进的军用雷达都具备完善的故障自动检测系统,该系统对提高雷达的总体性能、可靠性、可使用性、可维修性具有极其重要作用。 2 总体要求 雷达故障自动检测系统是采用现代计算机软件、硬件技术,现代电子测量和控制技术、测量仪器与仪器总线以及信息综合处理等技术,通过系统硬件的组成和软件的集成构成一个雷达故障自动检测系统,通过该系统对雷达信号的测量与采集,实现对雷达一系列电气参数的自动测量、分析、处理,快速、准确、完成故障隔离到LRU等功能。2.1 技术指标 系统自动测试内容的主要技术指标应包括对雷达电气参数的测量精度,对雷达系统、组合、可更换单元的故障检测率、隔离率、隔离深度、虚警率以及检测时间等。 主要技术指标如下: a.测试时间:实时测试时间服从雷达测试周期的时间调度要求,战前功能测试时间应小于3min,維修或维护测试时间应小于5min; b.虚警率: 对系统、组合、可更换单元的总虚警率应小于3%;系统应具有分析是雷达故障还是检测设备发生故障的能力; c.故障检测率:按设计要求,测试系统对分雷达系统机柜、组合级的故障检测率应达到100%,对各组合级可更换单元的故障检测率应达到95%以上; d.故障隔离深度:故障隔离深度为雷达系统的可更换单元;
雷达目标识别发展趋势 雷达具备目标识别功能是智能化的表现,不妨参照人的认知过程,预测雷达目标识别技术的发展趋势: (1)综合目标识别 用于目标识别的雷达必将具备测量多种目标特征的手段,综合多种特征进行目标识别。我们人类认知某一事物时,可以通过观察、触摸、听、闻、尝,甚至做实验的方法认知,手段可谓丰富,确保了认知的正确性。 目标特征测量的每种手段会越来越精确,就如同弱视的人看东西,肯定没有正常人看得清楚,也就不能认知目标。 识别结果反馈给目标特征测量,使目标特征测量成为具有先验信息的测量,特征测量精度会有所提高,识别的准确程度也会相应提高。 雷达具备同时识别目标和背景的功能。人类在观察事物的时候,不仅看到了事物的本身,也看到了事物所处的环境。现有的雷达大多通过杂波抑制、干扰抑制等方法剔除了干扰和杂波,未来的雷达系统需要具备识别目标所处背景的能力,这些背景信息在战时也是有用的信息。 雷达具备自适应多层次综合目标识别能力。用于目标识别的雷达虽然需要具备测量多种目标特征的手段,但识别目标时不一定需要综合所有的特征,这一方面是因为雷达系统资源不允许,另一方面也是因为没有必要精确识别所有的目标。比如司机在开车时,视野中有很多目标,首先要评价哪几个目标有威胁,再粗分类一下,是行人还是汽车,最后再重点关注一下靠得太近、速度太快的是行人中的小孩子还是汽车中的大卡车。 (2)自学习功能 雷达在设计、实现、装备的过程中,即具备了设计师的基因,但除了优秀的基因之外,雷达还需要具有学习功能,才能在实战应用中逐渐成熟。 首先,要具有正确的学习方法,这是设计师赋予的。对于实际环境,雷达目标识别系统应该知道如何更新目标特征库、如何调整目标识别算法、如何发挥更好的识别性能。 其次,要人工辅助雷达目标识别系统进行学习,这就如同老师和学生的关系。在目标识别系统学习时,雷达观测已知类型的合作目标,雷达操作员为目标识别系统指出目标的类型,目标识别系统进行学习。同时还可以人为的创造复杂的电磁环境,使目标识别系统能更好地适应环境。 (3)多传感器融合识别 多传感器的融合识别必定会提高识别性能,这是毋容置疑的。这就好比大家坐下来一起讨论问题,总能讨论出一个好的结果,至少比一个人说的话更可信。但又不能是通过投票的方式,专家的话肯定比门外汉更有说服力。多传感器融合识别需要具备双向作用的能力。 并不是给出融合识别的结果就结束了,而是要利用融合识别的结果反过来提高各个传感器的识别性能,这才是融合识别的根本目的所在。反向作用在一定程度上降低了人工辅助来训练目标识别系统的必要性,也减少了分别进行目标识别试验的总成本。
雷达目标识别技术述评 孙文峰 (空军雷达学院重点实验室,湖北武汉430010) 摘要:首先对雷达目标识别研究领域已经取得的成果和存在的问题进行简单的回顾,然后结合对空警戒雷达,阐明低分辨雷达目标识别研究的具体思路。 关键词:雷达目标识别;低分辨雷达 Review on Radar Target Recognition SUN Wen-feng (Key laboratory, Wuhan Radar Academy, Wuhan 430010, China)Abstract: The acquired productions and existent problems of radar target recognition are reviewed simply, then the specific considerations of target recognition with low resolution radar are illustrated connect integrating with air defense warning radar in active service. Key words: radar target recognition; low resolution radar 1.引言 雷达目标识别(RTR—Radar Target Recognition)是指利用雷达对单个目标或目标群进行探测,对所获取的信息进行分析,从而确定目标的种类、型号等属性的技术。1958年,D.K.Barton(美国)通过精密跟踪雷达回波信号分析出前苏联人造卫星的外形和简单结构,如果将它作为RTR研究的起点,RTR至今已走过了四十多年的历程。目前,经过国内外同行的不懈努力,应该说RTR已经在目标特征信号的分析和测量、雷达目标成像与特征抽取、特征空间变换、目标模式分类、目标识别算法的实现技术等众多领域都取得了不同程度的突破,这些成果的取得使人们有理由相信RTR是未来新体制雷达的一项必备功能。目前,RTR技术已成功应用于星载或机载合成孔径雷达(SAR—Synthetic Aperture Radar)地面侦察、毫米波雷达精确制导等方面。但是,RTR还远未形成完整的理论体系,现有的R TR 系统在功能上都存在一定的局限性,其主要原因是由于目标类型和雷达体制的多样化以及所处环境的极端复杂性。本文首先对RTR研究领域已经取得的成果和存在的问题进行简单的回顾,最后结合对空警戒雷达,阐明了低分辨雷达目标识别研究的具体思路。 2.雷达目标识别技术的回顾与展望 雷达目标识别研究的主体有三个,即雷达、目标及其所处的电磁环境。其中任何一个主体发生改变都会影响RTR系统的性能,甚至可能使系统完全失效,即RTR研究实际上是要找到一种无穷维空间与有限类目标属性之间的映射。一个成功的RTR系统必定是考虑到了目标、雷达及其所处电磁环境的主要可变因素。就目标而言主要有目标的物理结构、目标相对于雷达的姿态及运动参数、目标内部的运动(如螺旋桨等)、目标的编队形式、战术使用特点等等;就雷达而言主要有工作频率、带宽、脉冲重复频率(PRF)、天线方向图、天线的扫描周期等等;环境因素主要有各种噪声(如内部噪声和环境噪声)、杂波(如地杂波、海杂波和气象杂波)和人为干扰等。在研制RTR系统时必须综合考虑这些因素,抽取与目标属性有关的特征,努力消除与目标属性无关的各种不确定因素的影响。
雷达测试系统发展探析 发表时间:2018-05-18T10:37:03.017Z 来源:《防护工程》2018年第1期作者:袁家宝[导读] 雷达是通过利用无线电寻找目标,并对目标在空间中的位置进行检测,因此,雷达又被称为“无线电定位技术”。中国电子科技集团公司第三十八研究所安徽省合肥市 230031 摘要:雷达是现代化科学技术发展下的新兴产物,通过利用雷达技术构建雷达检测系统,可将其运动到多种发展行业,推动现代化科学技术的进程,提高雷达技术的稳定性、可靠性。 关键词:雷达测试系统;发展与应用;探究策略 雷达是通过利用无线电寻找目标,并对目标在空间中的位置进行检测,因此,雷达又被称为“无线电定位技术”。本文将针对雷达测试系统的特点与测试系统组成进行分析,了解雷达测试系统的发展与应用。 一、雷达测试系统的产生与发展 雷达起源于英国与德国的交战时期,因英国需要一种技术对德国飞机进行搜集,实现反空袭作战。因此,二战期间所产生的雷达技术具有空空火控、空地轰炸、地空搜索、敌我识别等功能。二战结束后,雷达技术得到新的发展,通过大量研究学者对雷达技术不断研究,逐步性形成单脉冲角度跟踪雷达体制、脉冲多普勒信号处理雷达体制、合成孔径和脉冲压缩的高分辨率雷达体制、结合敌我识别的组合系统雷达体制、结合计算机的自动火控系统雷达体制、地形回避和地形跟随雷达体制、无源或有源的相位阵列雷达体制、频率捷变雷达体制、多目标探测与跟踪雷达体制等。随着微电子等科学技术的不断发展,对雷达技术产生一定的影响,不但扩大了雷达技术研究领域,还增加了雷达技术的各项功能。如今雷达探测技术已经从传统单一的探测器技术,演变出多种探测技术,例如红外光探测技术、紫外光探测技术、激光探测技术以及其他种类的光学探测技术。 二、雷达测试系统的组成与作用 雷达测试系统的类型有很多,其基本原理大致相同,基本组成结构大体一致,主要由发射机、发射天线、接收机、接收天线,处理部分、显示器组成,并运用电源设备、数据录取设备、抗干扰设备等辅助性设备。例如单基地脉冲雷达测试系统,其基础结构如图1所示,主要由发射机、发射天线、信号处理机、终端设备等构成。当雷达测试系统中的发射机工作时会产生辐射所需的脉冲功率,因此,由发射机所产生的脉冲功率强度符合实际测试需求,是一种重复周期为“Tr”、波形脉冲宽度为“τ”的高频脉冲串。在雷达测试系统中所运用到的发射机主要有两种形式,一种是直接振荡式发射机,另一种是功率放大式发射机。其中,“直接振荡式发射机”是通过控制脉冲调制器使发射机所产生的高频脉冲功率能够直接被馈送到天线中,例如磁控管振荡器;“功率放大式发射机”是将具有较高稳定性的频率源作为频率基准,例如频率综合器,并将低功率电平上所产生的高频脉冲串波形作为激励信号,通过发射机对脉冲功率,将功率馈给天线,例如主振放大式发射机。因此,功率放大式发射机的频率稳定度相对较高,每次辐射相参,为回波信号作相参处理工作提供可靠信息,与此同时功率放大时发电机还能够产生多种具有复杂性的脉压波形,以此满足雷达测试系统的各种需求。从发射机输出的功率能够直接馈送给天线,然后由天线向空间进行辐射。 图1 单基地脉冲雷达测试系统基础结构示意图 三、雷达测试系统的应用特点 雷达性能参数测量工作被融入到雷达装备各个运行阶段,例如技术等级鉴定、雷达验收、维护检修等工作中,实现全寿命周期检测,因此雷达性能参数测量工作是一项基础性技术工作,是判断雷达技战术性能指标是否满足质量要求与技术指标的重要手段。因此,雷达性能参数测量的应用能够保证雷达装备设计具有较高的合理性与科学性,有效降低生产调试成本,提高雷达装备在使用过程中的可信度,使雷达装备能够在整个工作过程有一个良好的工作状态,最大程度上发挥雷达装备的战斗力,提高雷达装备的应用价值。 通过对雷达测试系统进行研究,能够对雷达装备战术性能进行正确评估,了解雷达装备的技术状态,为雷达部队指挥员的作战使用、监控空中目标、搜索目标提供可靠的理论依据,同时能够对雷达装备故障进行系统定位,提升雷达装备质量,延长设备使用寿命。因此,对雷达测试系统工作是雷达装备研制人员、验收人员、使用人员、维修人员的必备工作。
雷达式生命探测系统 一、选题依据 1、发展现状和趋势 “生命探测技术”是用来探测人类生命体并确定其状态的技术,在应急救援、军事和反恐等领域有着广泛的应用前景。目前国际上“生命探测技术”按探测原理主要分为:音频探测、视频探测和雷达式探测等。与基于红外、光学及超声的探测技术相比,雷达式生命探测技术具有非接触、穿透力强、能精确定位的特点,成为目前最具潜力的生命探测技术。 信息和网络技术的应用是应急救援预案设置工作的一项重要内容,而建立一个快速高效的应急移动通信系统,则是保证突发事件应急指挥和处理所必须的硬件。汶川大地震发生后,在地震重灾区北川,一台在废墟、瓦砾中搜寻生命的仪器,以它有效的战绩,引起了救援队伍的关注,它就是我国自主研制的搜救利器——“生命探测雷达”。“生命探测雷达”是基于雷达技术、生物医学工程技术研制的高科技应急救援装备,可通过探测呼吸、心跳等生命体征,快速搜寻被埋于倒塌建筑物、废墟等复杂环境中的幸存者。“生命探测雷达”在汶川地震搜寻中主要发挥了以下两个重要作用: (1)在进入灾害现场的初期,首先利用该雷达可探测生命体的大概位置和距离这一功能,对有呼救能力的受困者进行位置确定,为营救人员提供指导信息,争取救援时间和降低救援危险; (2)在救援中后期,对无呼救能力的被掩埋者进行搜寻。搜寻探测方式主要有两种:一是根据存活者提供的压埋信息,对废墟进行有针对性的探测搜寻,以确定被压埋者是否存活及大致位置。二是对无任何线索的废墟进行拉网式搜寻探测,确定大片废墟中是否还有存活者。在受灾严重的北川县城,雷达搜救小组在60 多个小时的黄金救援搜寻过程中,大约探测搜寻了25 处大型倒塌的建筑废墟,在50 多个点、区内发现生命信息。搜救小组将探测结果及时反馈给营救人员,为及时营救生命提供了重要的指导信息,使后续的救援人员成功地营救了20 位幸存者。 雷达式生命探测技术是近年来迅速发展起来的一项前沿技术,英国《新科学家》杂志近期将该技术评价为未来30 年内最酷的10 项发明之一。非接触生命探测雷达是伴随着雷达技术、生物医学工程技术、微电子技术、计算机技术等的发展,以及军事、医学等领域的需要而产生的,是指借助于外来能量(探测媒介),不接触生命体,可在一定距离范围内、隔一定介质(如衣服、纱布、砖墙、废墟等)、在对人体无约束的情况下,探测生命信号,这是一种新型的探测技术。该探测技术克服了激光、红外生命探测技术受温度影响严重、遇物体阻挡失效的问题,也克服了超声探测空间传播衰减大、受环境杂物反射干扰、水、冰、泥土阻挡失效的问题。采用该探测技术探测生命信息,不仅弥补了接触式探测技术的局限性 (需要电极、传感器接触生命体);而且还弥补采用激光、红外、声波等探测生命信息的局限性 (穿透力弱) , 因此近年来备受国内外学者的关注。目前国外该技术的研究主要集中在美国、日本、德国、希腊等国家。我国也不甘落后,从1998 年起,第四军医大学生物医学工程系王健琪教授带领的研究小组,在我国率先对这一课题开展系统研究。经过长达十年的不懈努力,研制出具有自主知
信号检测与估计理论在 雷达系统方面的应用摘要:随着互联网应用的普及及发展,信号的检测与估计技术的应用也越来越受到人们的 关注。雷达中的信号检测是一个综合性问题,涉及多个学科,多领域知识,所以它是科学领域最为关注的问题。近年来已经开展了大量雷达系统信号实现方法相关的研究课题,其中回波信号的检测和估计是最为重要的方面。本论文就是针对雷达信号检测和估计的精确性问题加以展开的。 关键词:雷达系统,信号估计,信号检测 第一章雷达系统 1.1起源和发展 早期雷达用接收机、显示器并靠人眼观察来完成信号检测和信息提取的工作。接收机对目标的回波信号进行放大、变频和检波等,使之变成能显示的视频信号,送到显示器。人们在显示器的荧光屏上寻找类似于发射波形的信号,以确定有无目标存在和目标的位置。随着雷达探测距离的延伸,回波变弱,放大倍数需要增加。于是,接收机前端产生的噪声和机外各种干扰也随着信号一起被放大,而成为影响检测和估计性能的重要因素。这时,除了降低噪声强度之外,还要研究接收系统频带宽度对发现回波和测量距离精度的影响。这是对雷达检测理论的初期研究。后来,人们开始在各种干扰背景中对各种信号进行检测和估计的理论研究,其中有些结论,如匹配滤波理论,关于滤波、积累、相关之间等效的理论,测量精度极限的理论,雷达模糊理论等,已在实际工作中得到应用.
1.2雷达的概述 雷达的英文名字是radar,是“无线电探测与定位”的英文缩写。雷达的基本任务是探测感兴趣的目标,测定有关目标的距离、方问、速度等状态参数。雷达主要由天线、发射机、接收机(包括信号处理机)和显示器等部分组成。 雷达发射机产生足够的电磁能量,经过收发转换开关传送给天线。天线将这些电磁能量辐射至大气中,集中在某一个很窄的方向上形成波束,向前传播。电磁波遇到波束内的目标后,将沿着各个方向产生反射,其中的一部分电磁能量反射回雷达的方向,被雷达天线获取。天线获取的能量经过收发转换开关送到接收机,形成雷达的回波信号。由于在传播过程中电磁波会随着传播距离而衰减,雷达回波信号非常微弱,几乎被噪声所淹没。接收机放大微弱的回波信号,经过信号处理机处理,提取出包含在回波中的信息,送到显示器,显示出目标的距离、方向、速度等。 为了测定目标的距离,雷达准确测量从电磁波发射时刻到接收到回波时刻的延迟时间,这个延迟时间是电磁波从发射机到目标,再由目标返回雷达接收机的传播时间。根据电磁波的传播速度,可以确定目标的距离为:S=CT/2 其中S:目标距离;T:电磁波从雷达到目标的往返传播时间;C:光速 1.3雷达的工作原理 雷达是利用目标对电磁波的反射(或称为二次散射)现象来发现目标并测定其位置的空间任一目标所在位置可用下列三个坐标来确定:1>目标的斜距R;2> 方位角a;3>仰角B。同时也就是说根据雷达接收到的信号检查是否含有目标反射回波,并从反射回波中测出有关目标状态的数据。 第二章雷达中的信号检测 雷达的基本任务是发现目标并测定其坐标通常目标的回波信号中总是混杂着噪声和各类干扰而噪声和各种干扰信号均具有随机持性在这种条件下发现目标的问题属于信号检测的范畴信号检测理论就是要解决判断信号是否存在的方法及其最佳处理方式。 2.1.雷达信号的最佳检测及基本概念 检测系统的任务是对输入信号进行必要的处理和运算然后根据系统的输出来判断输入是否有信号存在它可用门限检测来描述。 检测过程中,由于门限取值的不同产生的错把噪声检测成了目标,这类错误称之为虚警,出现的概率称为虚警概率;反之,错把信号当成了噪声,称为漏检或漏警,相应出现概率为漏检概率。 门限的确定与选择的最佳准则有关。在信号检测中常采用的最佳准则有贝叶斯准则最小错误概率准则最大后验概率准则极大极小化准则以及纽曼—皮尔逊准则等。
第30卷第3期电子与信息学报Vol.30No.3 2008年3月 Journal of Electronics & Information Technology Mar.2008 一种合成孔径雷达图像特征提取与目标识别的新方法 宦若虹①②杨汝良①岳晋①② ①(中国科学院电子学研究所北京 100080) ②(中国科学院研究生院北京 100039) 摘 要:该文提出了一种利用小波域主成分分析和支持向量机进行的合成孔径雷达图像特征提取与目标识别的新方法。该方法对图像小波分解后提取低频子带图像的主成分分量作为目标的特征,利用支持向量机进行分类完成目标识别。实验结果表明,该方法可以明显提高目标的正确识别率,是一种有效的合成孔径雷达图像特征提取和目标识别方法。 关键词:合成孔径雷达;小波变换;主成分分析;支持向量机;识别 中图分类号:TN957.52 文献标识码:A 文章编号:1009-5896(2008)03-0554-05 A New Method for Synthetic Aperture Radar Images Feature Extraction and Target Recognition Huan Ruo-hong①②Yang Ru-liang①Yue-Jin①② ①(Institute of Electronics, Chinese Academy of Sciences, Beijing 100080, China) ②(Graduate University of the Chinese Academy of Sciences, Beijing 100039, China) Abstract: This paper presents a new method for synthetic aperture radar images feature extraction and target recognition which based on principal component analysis in wavelet domain and support vector machine. After wavelet decomposition of a SAR image, feature extraction is implemented by picking up principal component of the low-frequency sub-band image. Then, support vector machine is used to perform target recognition. Results are presented to verify that, the correctness of recognition is enhanced obviously, and the method presented in this paper is a effective method for SAR images feature extraction and target recognition. Key words: Synthetic Aperture Radar (SAR); Wavelet transform; Principal Component Analysis (PCA); Support Vector Machine (SVM); Recognition 1引言 合成孔径雷达(Synthetic Aperture Radar,SAR)图像目标识别是SAR图像解译和分析的重要组成部分,具有重要的商业和军事价值,是国内外SAR图像处理和模式识别领域的研究热点。特征提取是SAR图像目标识别过程中最重要的一步。为了得到可靠的目标识别结果,用于识别的特征必须在分类空间上具有良好的类内凝聚性和类间差异性[1]。目标识别过程的另一个关键步骤是分类方法的选择,分类方法性能的优劣,直接影响到最后的识别结果。 本文提出了一种利用小波域主成分分析(Principal Component Analysis,PCA)和支持向量机[2](Support Vector Machine,SVM)进行的SAR图像特征提取和目标识别方法。对小波分解得到的低频子带图像进行主成分分析[3]提取目标特征,得到的特征向量用支持向量机分类完成目标识别。用MSTAR数据对该方法进行验证,结果表明,该方法可以有效地提高目标的正确识别率。 2006-08-15收到,2007-01-05改回2目标识别步骤 本文的识别过程如图1所示由3个步骤组成:(1)图像预处理。对图像数据进行规则化调整。(2)特征提取。通过二维离散小波变换将图像变换到不同分辨率下的小波域;对低频子带图像进行主成分分析后提取主成分分量作为目标的特征向量。(3)利用支持向量机进行分类。在特征向量所形成的低维特征空间上完成目标识别并输出识别结果。 图1 识别过程框图 3图像预处理 3.1实验数据 本文使用的图像数据是MSTAR项目组公布的3类SAR 地面静止军用目标数据,包括装甲车BMP2,装甲车BTR70