《机械原理》课件-第3章运动分析第2讲电子教案
- 格式:ppt
- 大小:2.17 MB
- 文档页数:28

01机械原理概述Chapter机械原理的定义与重要性定义重要性机械原理的研究对象和内容研究对象主要研究各种机构(如连杆机构、凸轮机构、齿轮机构等)和机器(如内燃机、电动机、机床等)的工作原理、运动特性、力学性能以及设计计算方法等。
研究内容包括机构的组成原理、运动学分析、动力学分析、机械效率与自锁、机器的平衡与调速等。
机械原理的发展历程和趋势发展历程发展趋势02机构的结构分析与设计Chapter机构的基本概念和分类机构定义由刚性构件通过运动副连接而成的系统,用于传递运动和力。
机构分类根据运动特性可分为连杆机构、凸轮机构、齿轮机构等。
运动副类型包括低副(转动副、移动副)和高副(点接触、线接触)。
结构分析通过自由度计算、运动链分析等方法,确定机构的组成、运动特性和约束条件。
综合方法基于功能需求,选择合适的机构类型,进行组合、变异和演化,设计出满足特定要求的机构。
创新设计运用创新思维和现代设计方法,如拓扑优化、仿生学等,进行机构创新设计。
机构的结构分析和综合方法机构设计的原则和方法设计原则设计方法案例分析03机械传动与驱动Chapter机械传动的类型和特点摩擦传动啮合传动利用齿轮、链轮等啮合元件传递动力和运动。
具有传动效率高、工作可靠、使用寿命长等优点,但需要较高的制造精度和安装精度。
齿轮类型选择齿轮参数设计强度校核030201齿轮传动的设计与分析链传动和带传动的设计与分析链传动设计带传动设计强度校核液压与气压传动的设计与分析液压传动设计01气压传动设计02控制与调节0304机械系统动力学与振动Chapter机械系统动力学的基本概念和方法动力学基本概念动力学建模方法动力学分析方法机械系统的振动分析和控制振动基本概念振动分析方法振动控制策略机械系统动力学优化设计方法优化设计基本概念动力学优化设计方法优化设计实例分析05机械制造工艺与装备Chapter机械制造工艺的基本概念和流程机械制造工艺的基本概念机械制造工艺的流程机械制造装备的分类和特点机械制造装备的分类机械制造装备的特点先进制造技术是指基于先进制造理论、技术和方法的总称,包括计算机辅助设计(CAD )、计算机辅助制造(CAM )、计算机辅助工艺规划(CAPP )、数控技术(NC )、柔性制造系统(FMS )等。
机械原理电子教案第一章:机械原理概述1.1 教学目标了解机械原理的定义和发展历程。
理解机械原理的基本概念和内容。
掌握机械原理的应用领域和重要性。
1.2 教学内容机械原理的定义和发展历程。
机械原理的基本概念和内容。
机械原理的应用领域和重要性。
1.3 教学方法采用讲解和案例分析相结合的方式进行教学。
通过图片和视频等多媒体手段辅助教学。
引导学生进行思考和讨论,提高学生的理解能力。
1.4 教学评估课堂讲解和案例分析的参与度。
对机械原理的基本概念和内容的掌握程度。
对机械原理的应用领域和重要性的理解程度。
第二章:力学基础2.1 教学目标了解力学的基本概念和原理。
掌握力学中的重要定律和公式。
理解力学在机械原理中的应用。
2.2 教学内容力学的基本概念和原理。
牛顿定律及其应用。
摩擦力、弹力和重力的概念及其计算。
2.3 教学方法采用讲解和实验相结合的方式进行教学。
通过物理实验和实例分析,帮助学生直观地理解力学原理。
引导学生进行思考和问题解决,提高学生的应用能力。
2.4 教学评估课堂讲解和实验操作的参与度。
对力学基本概念和原理的掌握程度。
对力学在机械原理中应用的理解程度。
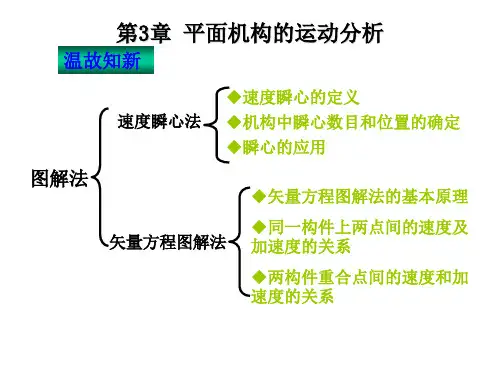
第三章:机械运动和动力学3.1 教学目标了解机械运动的基本概念和类型。
掌握动力学的基本原理和计算方法。
理解机械运动和动力学在实际工程中的应用。
3.2 教学内容机械运动的基本概念和类型。
速度、加速度和动量的概念及其计算。
牛顿第二定律和动力学的计算方法。
3.3 教学方法采用讲解和实例分析相结合的方式进行教学。
通过图解和物理实验,帮助学生直观地理解机械运动和动力学的概念。
引导学生进行思考和问题解决,提高学生的应用能力。
3.4 教学评估课堂讲解和实例分析的参与度。
对机械运动和动力学的基本概念和原理的掌握程度。
对机械运动和动力学在实际工程中应用的理解程度。
第四章:机械结构设计4.1 教学目标了解机械结构设计的基本原则和方法。
掌握机械结构的基本元件和连接方式。
理解机械结构设计在工程中的重要性和影响因素。