第五节振型向量正交性
- 格式:doc
- 大小:637.00 KB
- 文档页数:16
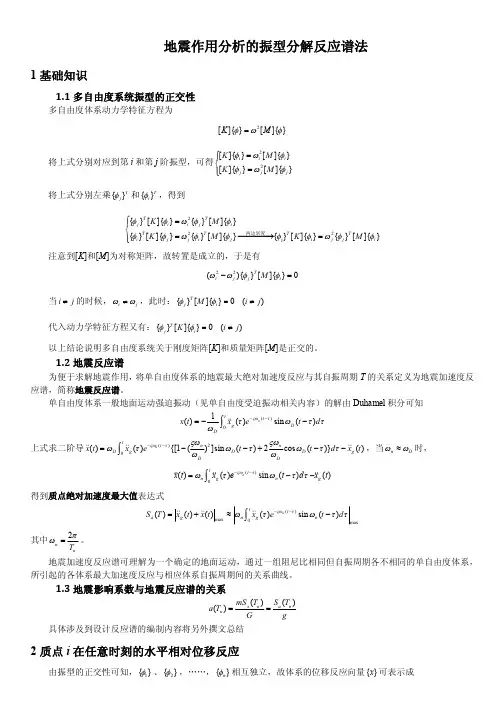
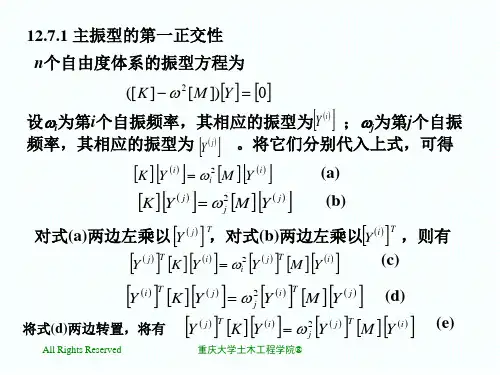
《结构动力学》小论文关于多自由度体系主振型正交性的几点思考姓 名:×× 学 号:U2009158×× 专业班级: 土木工程0905班 指导老师:龙晓鸿完成时间:2012年3月21日 关于多自由度体系主振型正交性的几点思考教材中对于多自由度体系主振型的正交性证明过程中,经过简单的变形之后,得到下式:和不同频率相应的主振型相对于质量矩阵M 来说,是彼此正交的: 以及不同频率相应的主振型相对于刚度矩阵M 来说,是彼此正交的: 上述得到式①和式②的前提都是在不同频率k l ωω≠下,那么我们有必要讨论一下,当k l ωω=时,主振型还是否能保持这种正交性。
一、 在重频()k l ωω=情况下主振型的正交性在重频情况下,一般来说是不正交的,但由于之间是线性独立的,那么,可以通过一些正交化手段和线性组合的方式,来找到使式①及式②成立的向量。
设多自由度体系有多个相同频率,且假设为12ωω=,则计算对应的阵型时,由方程组可以令1,2,,i n =L ,可得出n 个向量方程,其中有两个是不独立的。
我们不妨将最后两个方程去掉,同时将方程中与对应的振型向量()i Y 的最后两个元素1,n n y y -有关的项移动到方程的右边化作:22221111111,211,221,111,111,11,2222,11,11,21,22,11,11,1,()()()() ()()()() n n n n n n n n n i i i n i n n i n i n n i n i n n k m y k m y k m y k m y k m y k m y k m y k m y ωωωωωωωω-------------++-=-----++-=----L L L 2222,112,112,212,222,112,1122,12, ()()() ()n n n n n n n n n n n n n n n n nk m y k m y k m y k m y ωωωω--------------⎫⎬-++-=----L L ⎪⎪⎪⎪⎪⎪⎪⎪⎭④任意给定1,n n y y -两组线性独立的值()()111,n n y y -和()()221,n n y y -,例如可令对于给定的以上两组值,从方程组④解出其余2n -个()1,2,,2j y j n =-L的两组解,分别记作()1j y 和()2j y ,与⑤组合为第一主振型和第二主振型此组合的第一主振型和第二主振型显然不是唯一的,为保证它们之间满足正交性条件,将()2Y 改为(2)(1)Y cY +也是方程④的解,c 由以下正交性条件确定解出待定系数c从而得到相互独立且正交的第一主振型和第二主振型。
第五节振型向量正交性对多自由度系统振动问题的分析与两自由度系统没有本质上的区别。
只是由于自由度上的增多导致数学上计算变得复杂多了。
因此,在研究多自由度系统振动问题时,应找出一种便于分析的方法,这就是模态分析法(振型叠加法)。
为此,首先讨论有关耦合与解耦的方法。
一、耦合与解耦(教材6.7和6.8)举例说明什么是耦合与解耦。
Dy如图所示是一刚性杆AD,用刚度分别为1k和2k的弹簧支承与A、D两端。
(1) 取质心C 点的垂直位移C y 和刚性杆绕C 点的转角θ为广义坐标。
则刚性杆在振动中任一瞬时的受力如图所示。
由几何关系,得12112212D A C A C D C D A l y l y y y y l l l y y l y y l l θθθ+⎧=⎪=-+⎧⎪⇒⎨⎨=+-⎩⎪=⎪+⎩由牛顿运动定律,的系统的振动微分方程为121122C A DA D my k y k y J k y l k y l θ=--⎧⎨=-⎩ (a ) 式中m 是刚性杆AD 的质量,J 是刚性杆AD 绕质心C 的转动惯量。
整理式(a ),得()()()()12221122221111220C C C my k k y k l k l J k l k l y k l k l θθθ+++-=⎧⎪⎨+-++=⎪⎩ (b ) 写成矩阵的形式12221122221111220000C C y k k k l k l y m J k l k l k l k l θθ+-⎧⎫⎡⎤⎧⎫⎧⎫⎡⎤+=⎨⎬⎨⎬⎨⎬⎢⎥⎢⎥-+⎩⎭⎣⎦⎩⎭⎩⎭⎣⎦ (c ) 在上式中,质量矩阵是一个对角矩阵,反映在方程组中,就是两个微分方程的第一个方程仅包含一个广义坐标的二阶导数(加速度)C y ,第二个方程仅包含另一个广义坐标的二阶导数θ,这种加速度(惯性力)之间没有耦合的情况,称之为惯性解耦。
刚度矩阵是非对角矩阵,反映在方程组中,也就是两个微分方程的每一个方程都包含广义坐标C y 和θ,这种坐标之间有耦合的情况,称之为弹性耦合(静力耦合)。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。
矿产资源开发利用方案编写内容要求及审查大纲
矿产资源开发利用方案编写内容要求及《矿产资源开发利用方案》审查大纲一、概述
㈠矿区位置、隶属关系和企业性质。
如为改扩建矿山, 应说明矿山现状、
特点及存在的主要问题。
㈡编制依据
(1简述项目前期工作进展情况及与有关方面对项目的意向性协议情况。
(2 列出开发利用方案编制所依据的主要基础性资料的名称。
如经储量管理部门认定的矿区地质勘探报告、选矿试验报告、加工利用试验报告、工程地质初评资料、矿区水文资料和供水资料等。
对改、扩建矿山应有生产实际资料, 如矿山总平面现状图、矿床开拓系统图、采场现状图和主要采选设备清单等。
二、矿产品需求现状和预测
㈠该矿产在国内需求情况和市场供应情况
1、矿产品现状及加工利用趋向。
2、国内近、远期的需求量及主要销向预测。
㈡产品价格分析
1、国内矿产品价格现状。
2、矿产品价格稳定性及变化趋势。
三、矿产资源概况
㈠矿区总体概况
1、矿区总体规划情况。
2、矿区矿产资源概况。
3、该设计与矿区总体开发的关系。
㈡该设计项目的资源概况
1、矿床地质及构造特征。
2、矿床开采技术条件及水文地质条件。