圆锥齿轮行星机构运动分析
- 格式:docx
- 大小:15.92 KB
- 文档页数:1
行星齿轮工作原理行星齿轮,也称为行星传动,是广泛应用于各种机械装置中的一种传动机构。
它由一个太阳齿轮、一组行星齿轮和一个内齿圈组成。
行星齿轮通常用于需要高传动比和紧凑结构的应用,如自行车排挡、汽车变速器、机器人等等。
行星齿轮的工作原理是将输入的动力通过齿轮的组合转换为输出的动力,并且可以在传递动力的同时实现传动比的改变。
行星齿轮的工作过程如下:1.太阳齿轮:太阳齿轮位于行星齿轮机构的中心位置,接受输入的动力。
当太阳齿轮旋转时,它会通过齿轮齿距的干涉将动力传递给行星齿轮。
2.行星齿轮:行星齿轮是连接在太阳齿轮和内齿圈之间的一组齿轮。
它们被一个轴连接在一起,并且每个行星齿轮都有自己的齿数。
当太阳齿轮旋转时,行星齿轮也会随之旋转。
3.内齿圈:内齿圈是行星齿轮机构的外部齿轮,它与行星齿轮嵌合在一起。
当行星齿轮旋转时,内齿圈也会转动。
而内齿圈的齿数要大于行星齿轮的齿数,从而实现较大的传动比。
行星齿轮机构的工作原理主要是基于齿轮的齿距干涉和相对转动来实现动力的传递和传动比的改变。
当太阳齿轮旋转时,它的齿距会与行星齿轮的齿距相干涉,从而将动力传递给行星齿轮。
同时,行星齿轮的转动也会受到内齿圈的影响,进一步改变传动比。
行星齿轮的优点主要有以下几个方面:1.高传动比:由于行星齿轮结构的特殊性,可以实现大传动比的转动,比其他传动机构更有优势。
2.紧凑结构:行星齿轮机构的结构紧凑,占用空间小,适用于空间有限的场合。
3.负载分配:行星齿轮机构可以将负载分散到多个行星齿轮上,从而提高传动的可靠性和承载能力。
4.无倒退传动:行星齿轮机构的输出轴可以在不断电或无法输入动力的情况下保持静止,不会产生倒退传动的问题。
总结来说,行星齿轮是一种应用广泛的传动机构,通过太阳齿轮、行星齿轮和内齿圈的组合运动,可以实现输入动力的传递和输出动力的变化。
其结构紧凑、传动效率高、传动比可调等特点使得行星齿轮在各种机械装置中都得到了广泛应用。
行星齿轮的自转与公转1.引言1.1 概述概述部分的内容可以根据文章整体的主题和目的进行编写。
在这篇长文中,文章主要讨论的是行星齿轮的自转与公转的现象及其相关原理和关系。
在引言的概述部分,我们可以先简要介绍行星齿轮和自转与公转的概念。
行星齿轮是一种机械传动装置,其结构类似于太阳系中的行星运动,因而得名。
自转是行星齿轮内部某一个齿轮的旋转运动,而公转则是行星齿轮整体围绕中心轴的旋转运动。
这两种运动的协同作用使得行星齿轮能够实现更加复杂的传动方式,具有广泛的应用领域。
接着,在概述部分中,可以提及本文的结构安排,即接下来将分别介绍自转的定义和原理,以及行星齿轮的自转现象。
自转的定义和原理部分将展开对自转概念的解释,并阐述自转运动的发生机制和影响因素。
行星齿轮的自转现象部分将具体讲述行星齿轮内部各个齿轮之间的自转关系,以及其在传动中的特殊功能和应用。
最后,可以简要提及本文的目的,即通过对行星齿轮的自转与公转现象的研究,进一步了解该机械传动装置的工作原理和特点。
深入理解这些概念和原理,有助于实际工程应用和改进设计,也能为机械传动领域的研究提供新的思路和方向。
综上所述,引言部分的概述内容应包括对行星齿轮、自转和公转的简要介绍,以及本文的结构安排和目的。
这些内容将为读者提供一个整体的了解,并引导他们进入文章的正文部分。
1.2文章结构1.2 文章结构本文将分为三个主要部分来探讨行星齿轮的自转与公转现象。
首先,在引言部分中将概述本文要讨论的内容和目的,为读者提供一个整体的了解。
其次,在正文部分中,将分为两个小节来详细介绍自转的定义和原理,以及行星齿轮的自转现象。
最后,在结论部分中,将探讨自转与公转的关系,并探讨行星齿轮自转和公转的应用前景与意义。
通过这样的结构,读者将能够逐步了解行星齿轮的自转与公转现象,从自转的定义和原理开始,了解行星齿轮的自转现象,最后再将这些知识应用到实际生活中,探讨其应用前景与意义。
这样的结构将帮助读者逐步深入了解行星齿轮的自转与公转,从而对这个领域有更深入的理解和认识。
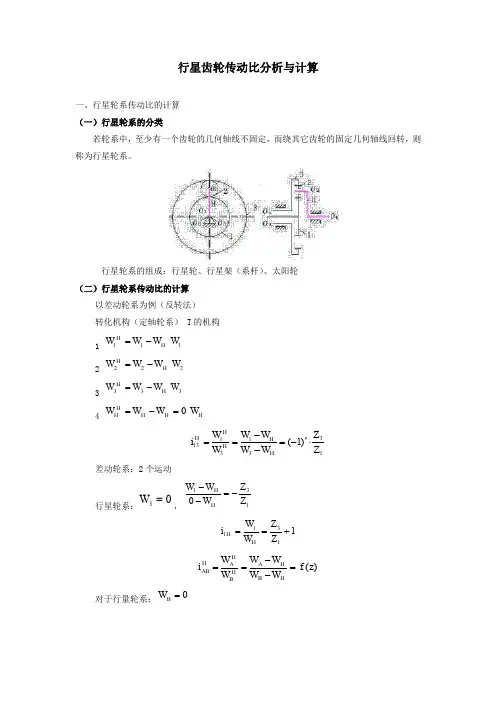
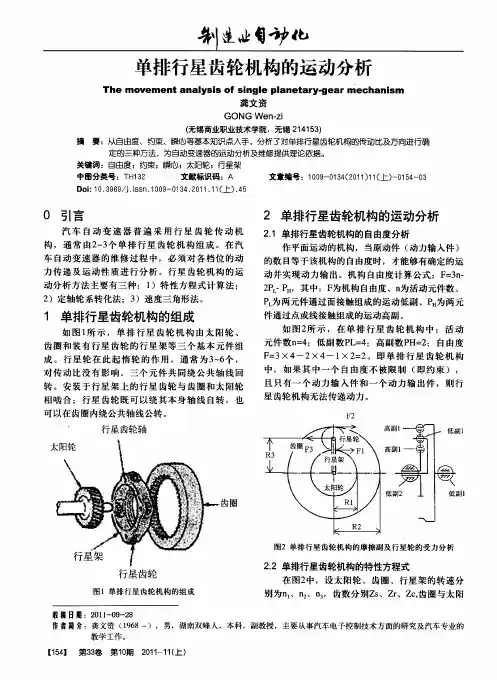
行星齿轮传动比分析与计算一、行星轮系传动比的计算 (一)行星轮系的分类若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。
行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构1234差动轮系:2个运动行星轮系:,对于行量轮系:H H W W W -=111W H H W W W -=222W H H W W W -=333W 0=-=H H H H W W W H W 13313113)1(Z Z W W W W W W i H HH H H⋅'-=--==03=W 1310Z Z W W W H H-=--11311+==Z Z W W i H H )(z f W W W W W W iH B H A H BH A HAB=--==0=B W∴∴例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。
求:输入件H 对输出件1的传动比i H1解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动∵W 3=0∴∴若Z 1=99行星轮系传动比是计算出来的,而不是判断出来的。
AHHA H H A H AB i W WW W W i -=-=--=110HAB AH i i -=1213223113)1('⋅⋅⋅-=--=Z Z Z Z W W W W i H HHH H Hi Z Z Z Z W W W 13213210'=--H H i Z Z Z Z W W 13213211'=+-HH i i 131100100991011⨯⨯-=100001001009910111111=⨯⨯-==HH i i 1001-=H i(三)复合轮系传动比的计算复合轮系:轮系中既含有定轴轮系又含有行星轮系,或是包含由几个基本行星轮系的复合轮系。
行星齿轮机构设计行星齿轮机构,也称太阳齿轮行星廓形机构,是一种常用的传动组件。
它由太阳轮、行星轮、行星架和内凸轮组成,是一种用来实现变速传动的机构。
行星齿轮机构可以根据不同的齿轮比来实现高、低速变速或反向驱动。
行星齿轮机构的设计要考虑到很多方面,如齿轮布置、齿轮参数的选择、行星架的设计以及齿轮的精度等等。
下面将对行星齿轮机构的设计进行详细介绍。
1. 齿轮布置行星齿轮机构的齿轮布置是整个机构设计的基础,它决定了行星齿轮机构的齿轮比。
在行星齿轮机构中,通常选择两个固定齿轮(太阳轮和内凸轮),以及一个围绕其中心轴线旋转的行星架。
不同的齿轮布置方式影响行星轮的齿轮数量和行星轮的齿轮比。
2. 齿轮参数的选择为了使行星齿轮机构具有良好的传动性能,需要对齿轮参数进行精确的计算和选择。
具体来说,需要选择正确的模数、齿数、分度圆直径等参数,以确保齿轮和行星架之间的匹配关系。
在选择齿轮参数时,应尽可能减小齿轮的重量和惯性,以提高机构的传动效率。
3. 行星架的设计行星架是行星齿轮机构中最为关键的组件之一。
它的设计需要考虑到行星轮的数目、行星轮与行星架之间的间隙、行星架的强度和刚度等因素。
在进行行星架设计时,应注意控制行星轮与行星架之间的最小可用空隙,以避免产生不稳定的振荡和噪音。
4. 齿轮的精度行星齿轮机构需要保证齿轮的精度,以确保传动的准确性和可靠性。
具体来说,应保证齿轮的齿面和相邻轴的同轴度,齿轮的轴向间隙以及齿轮的齿廓精度等。
在加工齿轮时,应采用高精度的数控机床,以确保齿轮的精度和质量。
2K—H型行星齿轮机构传动的啮合效率分析H型行星齿轮机构是一种新型的传动机构,具有许多优点,例如传动效率高、结构紧凑等。
啮合效率是评价传动机构性能的重要指标之一,本文将对2K—H型行星齿轮机构的啮合效率进行详细分析。
首先,我们需要了解2K—H型行星齿轮机构的结构。
2K—H型行星齿轮机构由一个太阳轮、两个行星轮和一个内啮合的外齿圈组成,其中每个行星轮上分别有两个齿轮。
当输入轴驱动太阳轮转动时,通过行星轮上的齿轮和外齿圈的啮合,实现输出轴的转动。
为了分析啮合效率,我们首先需要确定啮合损失。
啮合损失主要包括啮合瞬时速度失配损失、摩擦损失和轴向力损失。
啮合瞬时速度失配损失是由于齿轮啮合时速度不同导致的能量损失,摩擦损失是由于齿轮啮合摩擦产生的能量损失,轴向力损失是由于齿轮啮合时的轴向力引起的能量损失。
其次,我们需要计算2K—H型行星齿轮机构的传动效率。
传动效率可以通过下式计算得出:其中,\(P_{out}\)为输出轴功率,\(P_{in}\)为输入轴功率。
传动效率与啮合效率直接相关,啮合效率越高,传动效率也就越高。
最后,我们可以通过仿真软件对2K—H型行星齿轮机构的啮合效率进行分析。
通过建立相应模型,设定合适的工作参数,进行仿真计算得出啮合效率,进而评估传动效率。
通过不断调整参数,优化设计,可以提高传动效率,使其更加稳定可靠。
总之,对2K—H型行星齿轮机构的啮合效率进行分析是非常重要的。
通过深入研究,我们可以更好地了解其工作原理,找出影响啮合效率的关键因素,进一步提高传动效率,实现更好的性能表现。
希望本文的分析能够为相关领域的研究和工程实践提供参考和帮助。
行星齿轮机构太阳轮不动角度关系
太阳轮是行星齿轮机构中的一个重要组成部分,它的运动方式与其他齿轮有所不同。
在行星齿轮机构中,太阳轮是固定不动的,它的角度关系对整个机构的运行起着重要的作用。
为了更好地理解行星齿轮机构中太阳轮的角度关系,让我们以一个具体的例子来说明。
假设行星齿轮机构由太阳轮、行星轮和内圈轮组成,太阳轮是固定不动的,行星轮和内圈轮可以绕着太阳轮旋转。
当太阳轮不动时,行星轮绕着太阳轮旋转,同时内圈轮也绕着太阳轮旋转。
这时,行星轮和内圈轮的角度关系会发生变化。
具体来说,行星轮的角度会随着时间的推移而改变,而内圈轮的角度则会保持不变。
行星轮的角度变化是由太阳轮和行星轮的齿轮传动关系决定的。
太阳轮上的齿轮与行星轮上的齿轮咬合,当太阳轮不动时,行星轮的每一次转动都会使行星轮的角度发生变化。
而内圈轮则通过行星轮上的齿轮传动与行星轮保持同步,所以其角度保持不变。
通过这种角度关系,行星齿轮机构可以实现复杂的运动转换。
太阳轮作为固定点,起到了支撑和稳定的作用,而行星轮和内圈轮的角度变化则可以用来驱动其他机械装置。
总结起来,行星齿轮机构中的太阳轮不动,它与行星轮和内圈轮的角度关系使得机构能够实现复杂的运动转换。
太阳轮的固定作用和
行星轮、内圈轮的角度变化相互配合,使得整个机构可以稳定地工作。
这种角度关系是行星齿轮机构设计中的重要考虑因素,对于机械装置的运行起着至关重要的作用。
行星齿轮工作原理
行星齿轮是由一个固定中心轴和若干个围绕中心轴旋转的齿轮组成的机构。
其工作原理可以概括为以下几个步骤:
1. 固定齿轮:行星齿轮的中心轴上固定一个大齿轮,称为太阳轮。
太阳轮的外部齿轮齿数少于行星轮,通常是少于行星轮的两倍。
2. 行星轮运动:围绕太阳轮旋转的是若干个行星轮,它们的齿轮齿数与太阳轮相同,同时也与彼此相同。
这些行星轮以固定的间距连接到一个中心载体上,并能自由旋转。
3. 行星轮运动传递:当太阳轮转动时,它驱动行星轮绕着中心轴旋转。
行星轮由于与太阳轮直接接触,所以齿轮上的力会导致行星轮绕固定轨道旋转。
4. 增速传递:太阳轮上的齿轮与每个行星轮的齿轮都有接触,当太阳轮旋转时,行星轮会以自己的轴心旋转,并绕着太阳轮的轨道旋转。
因为行星轮齿轮齿数多于太阳轮,所以行星轮的转速比太阳轮的转速快。
5. 输出传递:行星轮上的齿轮也与外围的环齿轮相连,环齿轮的齿数与太阳轮的齿数相同。
当行星轮绕太阳轮旋转时,它们的齿轮与环齿轮的齿轮齿数相同,因此环齿轮的转速与太阳轮的转速相同。
通过以上步骤,行星齿轮可以实现从太阳轮到环齿轮的力传递
和速度增大,用于传递和转换机械装置中的动力。
行星齿轮工作原理的设计可以提供更高的转速比并减少对齿轮系统的负载,并且由于各个行星轮的分布,其承载力和稳定性较高。
行星齿轮机构工作原理
行星齿轮机构是一种精密的传动装置,常用于机械设备中,其工
作原理是通过多个行星齿轮与太阳轮和内齿轮的组合来产生不同的传
动比。
行星齿轮机构由多个相同的行星齿轮和一个太阳轮组成,太阳轮
位于行星齿轮的中心,内齿轮位于行星齿轮外侧。
行星齿轮则位于外
齿轮上,并通过轴承固定在外齿轮上。
当内齿轮旋转时,行星齿轮会自转并绕太阳轮旋转,因此太阳轮
也会跟随行星齿轮同时旋转。
由于行星齿轮的数量不止一个,因此太
阳轮的输出转速与内齿轮的输入转速比值取决于行星齿轮的数量。
行星齿轮机构不仅具有高扭矩输出能力,还可以实现多重传动比
和反向转动。
此外,行星齿轮机构的结构紧凑,占用空间小,重量轻,具有良好的噪音和振动控制能力。
但是在实际应用过程中,行星齿轮机构也存在着一些问题。
如行
星齿轮之间的摩擦力会导致能量损失和寿命减少,行星齿轮的制造难
度和成本也相对较高。
为了有效解决这些问题,应注重行星齿轮机构的设计、制造和维护。
确保精度、刚度和耐久性,选择合适的工作液和润滑剂,制定规
范的维护计划和周期,以保证行星齿轮机构的性能和寿命。
综上所述,行星齿轮机构在机械工程领域中具有广泛的应用前景,充分了解并掌握其工作原理和优缺点对于设计、制造和维护高效、精
准的机械设备具有重要的意义。
% 锥齿轮行星机构运动分析
i=37/12*36/10*50/14; % 前置圆柱轮系传动比
hd=pi/180;d6=14.5*hd;d7=10.25*hd; % 锥齿轮节锥角
n1=[7755 11221 16021]; % 电动机转速(第1、5、10档) for j=1:3
n6=n1(1:j)/i; % 中心锥齿轮6的绝对转速
n7=n6*sin(d6)/sin(2*d7); % 行星锥齿轮7的绝对转速
nh=n7*sin(d7)/sin(d6+d7); % 行星锥齿轮7的公转速度
n7h=n7*sin(d6+2*d7)/sin(d6+d7); % 行星锥齿轮7的自转速度 end
disp ' ======== 已知条件 ========'
fprintf(' 前置圆柱轮系传动比 i = %3.3f \n',i);
fprintf(' 锥齿轮节锥角 d7 = %3.3f 度 \n',d7/hd); disp '
======== 输出计算结果 ========'
for j=1:3
fprintf(' 电动机转速 n1 = %3.0f r/min \n',n1(j));
fprintf(' 中心锥齿轮转速 n6 = %3.3f r/min \n',n6(j));
fprintf(' 行星锥齿轮转速 n7 = %3.3f r/min \n',n7(j)); fprintf('
行星锥齿轮公转转速 nh = %3.3f r/min \n',nh(j)); fprintf(' 行星锥
齿轮自转转速 n7h = %3.3f r/min \n',n7h(j)); disp ' '
end
% 锥齿轮行星机构运动分析
i=37/12*36/10*50/14; % 前置圆柱轮系传动比
hd=pi/180;d6=14.5*hd;d7=10.25*hd; % 锥齿轮节锥角
n1=[7755 11221 16021]; % 电动机转速(第1、5、10档) for j=1:3
n6=n1(1:j)/i; % 中心锥齿轮6的绝对转速
n7=n6*sin(d6)/sin(2*d7); % 行星锥齿轮7的绝对转速
nh=n7*sin(d7)/sin(d6+d7); % 行星锥齿轮7的公转速度
n7h=n7*sin(d6+2*d7)/sin(d6+d7); % 行星锥齿轮7的自转速度 end
disp ' ======== 已知条件 ========'
fprintf(' 前置圆柱轮系传动比 i = %3.3f \n',i);
fprintf(' 锥齿轮节锥角 d7 = %3.3f 度 \n',d7/hd); disp '
======== 输出计算结果 ========'
for j=1:3
fprintf(' 电动机转速 n1 = %3.0f r/min \n',n1(j));
fprintf(' 中心锥齿轮转速 n6 = %3.3f r/min \n',n6(j));
fprintf(' 行星锥齿轮转速 n7 = %3.3f r/min \n',n7(j));
fprintf(' 行星锥齿轮公转转速 nh = %3.3f r/min \n',nh(j));