
1. 一列简谐横波沿x 轴传播,波长为1.2m ,振幅为A 。当坐标为x =0处质元的位移为且向y 轴负方向运动时,坐标为x =0.4m 处质元的位移为。当坐标为x =0.2m 处的质元位于平衡位置且向y 轴正方向运动时,x =0.4m 处质元的位移和运动方向分别为
A. 、沿y 轴正方向
B. ,沿y 轴负方向
C. 、沿y 轴正方向
D. 、沿y 轴负方向
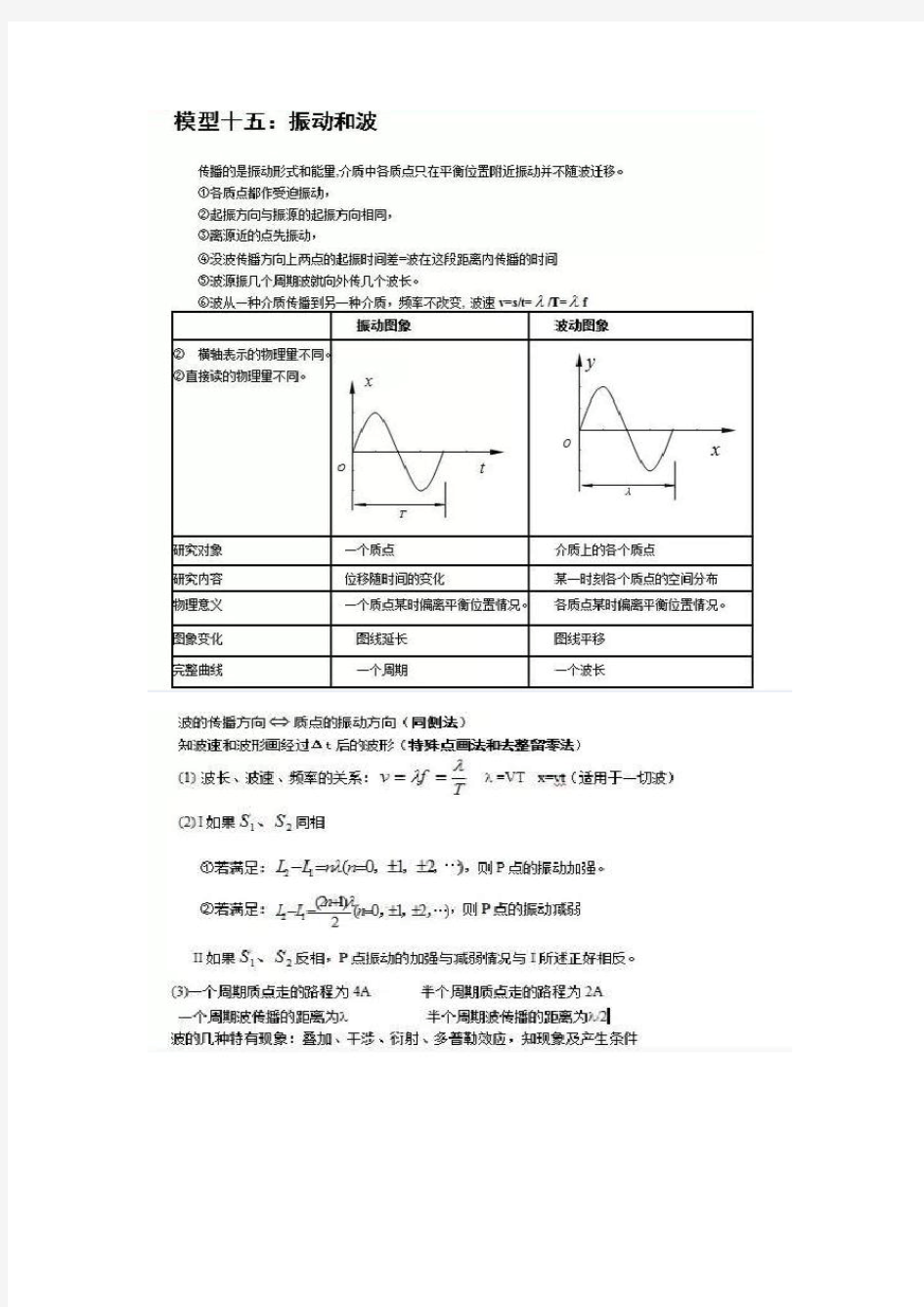
2. 一列简谐横波在t=0时的波形图如图所示。介质中x=2m 处的质点P 沿y 轴方向做简谐运动的表达式为y=10sin (5πt)cm 。关于这列简谐波,下列说法正确的是______。
A. 周期为 4.0s
B. 振幅为20cm
C. 传播方向沿x 轴正向
D. 传播速度为10m/s
3. 图示为一列沿x 轴负方向传播的简谐横波,实线为t =0时刻的波形图,虚线为t =0.6 s 时的波形图,波的周期T >0.6 s ,则( )
A. 波的周期为2.4 s
B. 在t =0.9s 时,P 点沿y 轴正方向运动
C. 经过0.4s ,P 点经过的路程为4m
D. 在t =0.5s 时,Q 点到达波峰位置
4.如图所示,波源S 从平衡位置y=0开始振动,运动方向竖直向上(y 轴的正方向),振动周期T=0.01s ,产生的简谐波向左、右两个方向传播,波速均为v=80 m/s.经过一段时间后,P 、Q 两点开始振动。已知距离SP=1.2 m ,SQ=2.6 m.若以Q 点开始振动的时刻作为计时的零点,则在下列振动图象中,能正确描述P 、Q 两点振动情况的是( )
2A
-
2
A 1
2A -
1
2A
-
A
A
A. 甲为Q点的振动图象
B. 乙为Q点的振动图象
C. 丙为P点的振动图象
D. 丁为P点的振动图象
5.图甲为一列简谐横波在某一时刻的波形图,图乙为质点P以此时刻为计时起点的振
动图象。从该时刻起()
A. 经过0.35 s时,质点Q距平衡位置的距离小于质点P距平衡位置的距离
B. 经过0.25 s时,质点Q的加速度大于质点P的加速度
C. 经过0.15 s,波沿x轴的正方向传播了3 m
D. 经过0.1 s时,质点Q的运动方向沿y轴正方向
答案解析
1. 解析:
当坐标为x =0处质元的位移为且向y 轴负方向运动时,只可能出现上边所画的两种图形,又由于坐标为x =0.4m 处质元的位移为,
所以一定是第二个图形出现,此时0.2m 处的质点在平衡位置且向y 轴负方向运动。当坐标为x =0.2m 处的质元位于平衡位置且向y 轴正方向运动时,应该在半个周期的奇数倍时间之后。波形应该和此时的波形关于x 轴对称,质点运动方向与此时刻的情况正相反。
答案:C
2. 解析:
周期为:,由波的图象得:振幅、波长,
故波速为,P 点在t=0时振动方向为正y 方向,波沿x 轴正方向传播。
答案:C 、D
3. 解析:根据题意应用平移法可知
T =0.6s ,解得T =0.8s ,A 错;由图可知振幅A =0.2m 、波长λ=8m 。t =0.9s =1T ,此时P 点沿y 轴负方向运动,B 错;0.4s =T
,
A
2
A 5ωπ=20.4T s π
ω
==10A cm =4m λ=10/v m s T
λ
=
=3
4181
2
运动路程为2A =0.4m ,C 错;t =0.5s =
T =T +T ,波形图中Q 点正在向下振动,从平衡位置向下振动了T ,经T 到波谷,再过T 到波峰,D 对。
答案:D
4. 解析:波的能量由S 点传播到Q 点所需要的时间:t 1=
=
s=3T ,则Q 点
振动滞后S 点3个周期。波的能量由S 点传播到P 点所需要的时间:t 2==s=1
T ,则P 点振动滞后S 点1个周期。若以Q 点开始振动的时刻为计时零点,Q 点恰好处
于平衡位置且向上振动,而P 点超前Q 点1个周期,此时P 点恰好处于波谷。综上可得
A 、D 正确。
答案: A D
5. 解析:由振动图象可判定t =0时刻质点P 向下振动,则机械波向右传播。经0.35s ,
即经1
T 时,P 点在波峰,故Q 距平衡位置的距离小于P 到平衡位置的距离,A 对;经0.25 s ,即经1T 时,P 在波谷,Q 的加速度小于P 的加速度,B 错;波速v ==m/s
=20 m/s ,所以经0.15 s 波沿x 轴的正方向传播的距离s =vΔt=20×0.15 m=3 m ,C 对;Q 点图示时刻向上振动,经半个周期,其运动方向沿y 轴负方向,D 错。
答案:AC
58121
8
18181
2
v SQ
x 80
6.241
41v
SP x
802.1212
1
4
3
4
3
43T 2
.04
万方数据
2010年12月噪声与振动控制第6期 时可忽略阻尼的影响。忽略阻尼的单元动平衡方程如下: 瞰H甜)。+区]I“}。={厂}。 式中:[M卜质量矩阵; {瑟■单元节点加速度; [K】乞单元的刚度矩阵; {扰■单元节点位移矩阵; {厂}f-等效节点力。 1.2梁单元BEAMl88的描述 BEAMl88假设与限带0: (1)梁长度不能为0。 (2)默认的翘曲约束效应假定为忽略。 (3)截面失效和折叠不计算。 (4)如果存在偏移的话,转动自由度在集中质量矩阵时不计算。 2挠曲轴系有限元模型的计算 船舶推进轴系是一个结构复杂的弹性连续系统,为了便于计算,必须对实际轴系进行简化,而模型简化得是否合理,对计算结果具有很大的影响【7】。常规的推进轴系振动计算中,过去大多采用集总参数模型。对于轴系这样的复杂结构,运用有限元方法进行振动计算具有明显的优越性。本文应用ANSYS有限元软件对其传动轴系进行振动计算,为进一步的设计提供参考。 针对本文的研究对象即某近海拖轮推进轴系,根据其实际结构,发动机输出法兰通过齿轮箱变速后,和中间轴连接;中间轴和艉轴之间有联轴节。中间轴长7.6m,外径0.26m,有一个轴承支承;艉轴长10.75m,外径0.248m,前、中、后分别有三个轴承;中间轴和艉轴中都布置有润滑系统;螺旋桨总重2739kg。见图1,为此轴系经简化处理后的结构示意图。研究其横向振动的模型对轴系部件的简化方法如下: (1)将推力轴、中间轴及螺旋桨轴按自然分段为等截面均质轴段元件,对轴系本体部分采用BEAMl88梁单元模拟。 (2)对联轴节部分,将其同样简化为梁单元,其内径不变,只是将梁单元的外径适当放大,来模拟这部分的强度。 (3)对螺旋桨部分,将艉轴部分适当延长来模拟螺旋桨部分的长度,将螺旋桨的质量加上附水质量(变距桨按30%的螺旋桨干质量计算)简化为集中质量,集中质量直接加在螺旋桨的几何中心位置。 (4)一般不考虑齿轮啮合刚度和油膜刚度。 (5)对弹性支承的轴承部分采用COMBINEl4 簧单元模拟,略去其长度的影响。 (6)与主机相连的连轴节或离合器如系弹性连接算作弹性支座,如为刚性连接则作为固定端。 在轴系的有限元建模中,只保留从齿轮箱输出法兰到螺旋桨部分的轴系。经过以上简化处理,可以建立轴系的计算模型。如图2为其有限元计算模型。轴系共有节点98个,BEAMl88梁单元73个,采用了11种不同的截面形状,COMBINEl4弹簧单元12个,MASS21质量单元1个。 对其进行计算,从而求出固有频率,见表1。 图1轴系的简化模型 Fig.1Simplified modeloftheshaft 图2轴系的有限元模型 Fig.2Finiteelementmodeloftheshaft 对已经建好的正常轴系的有限元模型进行静力分析,轴系的挠曲状态如图3。 图3静力分析后轴系的弯曲变化 Fig.3Bendingdeflectionoftheshaftafterstaticanalysis根据此状态时节点的位移变化,利用同样的方法建立挠曲轴系有限元模型(由于本论文所研究的实船轴系较短,总长度是15.2m,当量直径是0.248m,因此静力分析后轴系上各节点的位移变化比较小,即轴系的挠度也较小)。然后进行横向振动计算,求出固有频率值,见表1。 经过比较,发现挠曲轴系固有频率的大小比正常轴系的固有频率要小,而且随着振动阶数的上升 而明显减小。 万方数据
第13例有预应力模态分析实例—弦的横向振动本例介绍了利用ANSYS进行有预应力模态分析的方法、步骤和过程,并使用解析解对有限元分析结果进行了验证。有预应力模态分析分为两大步骤:首先进行结构静应力分析,并把静应力作为预应力施加在模型上;其次进行模态分析。 13.1概述 有预应力模态分析用于计算有预应力结构的固有频率和振型,例如,对高速旋转的锯片的分析。除了首先要进行静力学分析把预应力施加到结构上外,有预应力模态分析的过程与普通的模态分析基本一致。 (1)建模并进行静力学分析。当进行静力学分析时,预应力效果选项必须打开(PSTRES,ON),关于集中质量的设置( LUMPM)必须与随后进行的有预应力模态分析一致。静力学分析过程与普通的静力学分析完全一致。 (2)重新进入Solution,进行模态分析。同样,预应力效果选项也必须打开(PSTRES,ON)。另外,静力学分析中所生成的文件Jobname.EMAT和Jobname.ESAV 必须都存在。 (3)扩展模态后在后处理器中查看它们。 13.2问题描述及解析解 图13-1所示为一被紧的琴弦,已知琴弦的横截面面积A=10-6m2,长度L=1m,琴弦材料密度ρ=7800 kg/m3,紧力T=2000 N,计算其固有频率。根据振动学理论,琴弦的固有频率计算过程如下:
琴弦单位长度的质量 γ=ρA =7800×10?6=7.8×10?3kg/m 波速 α=√T γ=√2000 7.8×10?3 =506.4m/s 琴弦的第i 阶固有频率 ?i = ia 2L =i ×506.42×1 =253.2iHz (i =1,2,… 按式(13-1)计算出琴弦的前10阶频率,如表13-1所示。 13.3分析步骤 13.3.1 改变任务名 拾取菜单Utility Menu →File →Change Jobname ,弹出如图13-2所示的对话框,在“[/FILNAM]”文本框中输入EXAMPLE13,单击“OK ”按钮。 图13-2 改变任务名对话框 13.3.2选择单元类型 拾取菜单Main Menu →Preprocessor →Element Type →Add/Edit/Delete ,弹出如图13-3所示的对话框,单击“Add …”按钮,弹出如图13-4所示的对话框,