SK-2系列智能PID调节数显控制仪说明书
- 格式:pdf
- 大小:2.14 MB
- 文档页数:23
![PID调节器说明书[2]](https://img.taocdn.com/s1/m/cee25e59767f5acfa0c7cd09.png)
一、概述SLRT系列智能PID调节仪是一种测量调节精度高,功能强的数字显示调节仪,它可为第一流的尖端设备提供优质服务,广泛地用于炼油、化工、冶金、建材、轻工、电子等行业温度、压力、流量、液位的自动检测和自动控制。
二、主要技术指标1、测量精度:0.3级2、报警输出:等同测量精度3、PID无扰动稳态,温度±2℃4、变送输出精度:±0.3%FS 负载能力:0-600∩5、输入特性要求:0-10mA:500∩、4-20mA:250∩、DC.V:≥200K∩热电偶及DC.mV:≥10M∩冷端自动补偿精度0-40℃范围内±0.3℃热电阻:三线制输入3×10∩以内完全补偿6、继电器接点容量:AC220V 7A7、过零触发式外接可控硅(可控硅小于500A)。
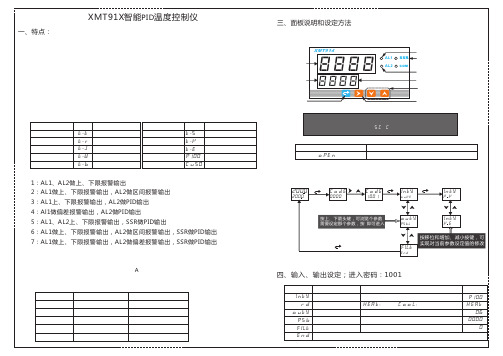
8、供电电源:AC220V±10%、直流DC24V±10%供选择9、功耗:≤15W10、工作环境:温度0-50℃、相对温度:<85%,无腐蚀性气体,无震动场合11、控制参数:比例带(P):0-999.9%可调积分时间(I):3-9999S可调微分时间(d):1-9999S可调调节周期(t):1-65S可调12、可以接受的输入信号:8种热电偶温度信号:K、E、S、B、J、T、EA、N5种热电阻温度信号:Pt100、Cu100、Cu50、G53、BA1、BA23种线性mV信号:0-20mV、0-100mV、0-500mV远传压力表等线性电阻信号:0-400∩2种线性mA信号:0-10mA、4-20mA2种线性直流V信号:0-5V、1-5V三、面板型式“SET”设定键:在正常运行状态下,按下该键可查看有关设定值的参数,此时上排主显示窗显示参数名称代号,下排付显示窗显示参数值。
停止按键1 分钟或同时按下退到正常运行状态。
进入设定状态,当显示SP1(第一报警参数)符号时,键入,主显示窗显示“SEL”,辅助显示窗显示“555”.输入象征操作权限的密码后,进入正式设定状态。

PID调节器说明书RKC日本理化CD系列PID调节器在工业生产中,通常需要把某递增物理量(如温度\压力\流量\液位等)维持在指定的数值上.当这些物理量偏离所希望的给定值时,即产生偏差.PID控制仪根据测时信号与给定值,达到自动控制的效果.模拟PID比例运算是指输出控制量与偏差的比例关系.仪表比例参数的设定值越大,控制的灵敏度越高.例如仪表的比例参数P设定为4%,表示测量值偏离给定值4%时,输出控制量变化100%积分运算的目的是消除静差.只要在偏差存在,积分作用将控制量向使偏差消除的方向移动.积分时间是表示积分作用强度的单位.仪表设定的积分时间越短,积分作用越强.例如仪表的积分时间设定为240秒时,表示对固定折偏差,积分作用的输出量达到和比例作用相同的输出量需要240秒比例作用的积分作用是对控制结果的修正动作,响应较慢.微分作用是为了消除其缺点而补充的,微分作用根据偏差产生的速度对输出量进行修正,使控制过程尽快回到原来的控制状态,微分时间是表示微分作用强度的单位,仪表设定的微分时间越长,则以微分作用进行的修正越强.位式PID控制一般PID控制是把连续的电流或电压输出到操作器对系统进行量化控制.而位式PID控制则是仪表按一定的周期,通过控制接点的通断对系统进行控制.在一个周期内,接点的接通和断开的时间长短反映控制量的大小,操作时为100%时,接点在整个周期内完全接通,操作量为0%时,接点在整个周期内完全断开.RKC型号定义请参照下列代码表确认产品是否与您指定的型号一致CD□□□□□□* □□□□1 2 3 4 5 6 7 8 9 101、规格尺寸48*48*100(开口:45*45) 48*96*100(开口:45*92)72*72*100(开口:68*68) 96*96*100(开口:92*92)2、控制类型: F:PID动作及自动演算(逆动作)D:PID动作及自动演算(正动作)W:加热/冷却PID动作及自动演算(水冷)*1A:加热/冷却PID动作及自动演算(风冷)*1 3、输入类型:见输入范围表4、范围代码:见输入范围表表1*1:电流输入时应设定电压输入并在输入端上接一只250Ω电阻。
目录1、概述 (3)2、产品使用环境 (4)3、产品主要技术参数和功能 (4)4、工作原理 (6)5、控制机构操作 (12)6、系统校正及调试 (14)7、隔爆装置 (19)8、系统安装、维护与故障排除 (20)一、概述SKHF--2型数字式智能型电液自动控制执行机构(以下简称执行机构)是在我公司SKHF-1型基础上升级换代的新型数字电液控制执行机构,专为炼油催化装置配套的更新型自动控制执行机构,其适用于滑阀控制、蝶阀控制、塞阀控制、主风机静叶阀控制及其它控制。
该执行机构在仪表控制上采用全数字化PLC控制,全套进口AD/DA 转换模块,工业控制液晶触摸屏做数据设定和操纵界面显示单元,名品开关电源。
因此,该执行机构比以往的控制执行机构更具有精度高、寿命长、定位准确、安全可靠、维护维修方便、调试简单等优点,是石油化工催化裂化装置中更理想的更新换代产品。
该执行机构按国家标准GB3836﹒2—2000《爆炸性环境用防爆电气设备隔爆型电气设备“d” 》的有关规定,制成隔爆型,防爆标志dⅡBT5。
可用于石油化工企业具有ⅡB级T1—T5组爆炸性气体混合物存在的场所,该隔爆型装置已经国家指定的检验机关检验合格。
该控制机构以电流信号(4~20mA)作为给定的控制信号,以高精度位移传感器做反馈元件,液压功率放大产生大推力输出。
执行机构具有伺服阀和比例阀互换通用模式,满足不同用户要求。
采用进口伺服比例阀,具有控制精度高,抗污染能力强,解决了比例阀死区问题。
当采用伺服阀控制时,系统能自动校正伺服阀的零点漂移,使控制精度始终保持在0.3%内。
系统在自锁上采用运行趋势分析,使滑阀运行更安全可靠。
系统采用液晶触摸屏作显示单元,所有调试都通过触摸屏输入方式,使调试更直观简单,电路部分更可靠稳定。
二、产品使用环境1、环境温度:-35℃ ~ +60℃;2、适用于低于海拔4000m的陆地区域;3、适用于是类别区ⅡB级防爆场所;三、产品主要技术参数和功能1、技术参数.1)、电机电源三相380V,50HZ,额定功率2.2KW;2)、仪表电源220V、50HZ,额定功率0.2KW;3)、系统工作压力8Mpa;4)、正常运行速度≥40mm/s;5)、控制精度:1/1000;6)、重复性:1/600;7)、分辨率:1/1000;8)、输入信号:4~20mA;9)、阀位输出信号:4~20mA;10)、反馈阻抗:不大于500Ω;11)、报警触电:无源常开触点,触点容量DC24V /1A;12)、工作油液:N32低凝液压油,热带地区可用N46抗磨液压油;13)、液压油清洁度:NAS7级;14)、液压系统过滤精度:5um;2、主要操作方式.1)、仪表室远程遥控操作;2)、现场仪表就地操作;3)、备用蓄压器操作;4)、液压手动操作;5)、机械手轮操作;3、显示功能.1)、显示输入信号0%--100%;2)、显示阀位信号0%--100%;3)、显示位置偏差±0%--±100%;4)、显示伺服阀信号或比例阀信号;5)、显示系统压力;6)、显示蓄压器压力;7)、显示油箱内油液温度-30℃~120℃;8)、显示报警参数;9)显示开关电源电压±15v;4、报警功能.当系统工作不正常时,提供下列报警:1)、液位低:油箱液面低于下限标记10—20mm;2)、油温高:油箱温度超过60℃(可设定);3)、压差大:精滤器压降超过0.45MP(可设定);4)、蓄压器压力低:蓄压器压力低于7MP(可设定);5)、系统压力低:系统压力低于5.5MP(可设定);6)、输入消失:输入信号≤-2.0%﹑≥105%时;7)、反馈消失:阀位信号≤-2.0%﹑≥105%时;8)、跟踪失调:当误差大于设定值时;5、自锁功能.1)、手动自锁功能;2)、输入信号≤-2.0%﹑≥105%自锁;3)、阀位信号≤-2.0%﹑≥105%自锁;4)、当输入信号和阀位信号反方向偏差设定值范围时自锁;以上任一种故障出现时执行机构立即就地自锁,保持阀位不变,保护现场,同时通往仪表室一对不带电常开触点闭合,现场液晶屏显示报警。

周聚天下管理目录一、产品型号 (1)二、用途 (1)三、工作原理 (1)四、结构简介 (1)五、技术参数 (4)六、安装与调试 (5)七、操作与维护 (5)八、易损件明细表 (7)九、附图 (7)一、产品型号及含义二、用途SKT系列筛下空气室数控跳汰机可用于选煤厂分选块煤、末煤和不分级原煤。
三、工作原理设备的工作原理:风阀按一定的频率将压缩空气压入并排出筛下空气室,使机体内的介质(水)形成脉动运动,而原煤在介质(水)的脉动作用下按比重分层,比重大的矸石分布在底层,比重小的中煤分布在中间,而比重轻的精煤则分布在上层,从而完成原煤的分选工作。
其工作过程:原煤由入料端给入机体第一段,在脉动水流的作用下,矸石分布在底层经排矸装置排出,而中煤、次精煤与精煤分布在上层,并随脉动水流进入机体的第二段(中煤段)。
在此段里,中煤分布在底层经排料装置排出;次精煤分布在中层溢流到第三段并通过排料装置排出;而精煤在上层至第三段末端通过溢流堰溢出跳汰机。
从而原煤被分离成矸石、中煤、次精煤和精煤四种产品。
四、结构简介SKT系列筛下空气室跳汰机主要由机体、电控气动风阀装置、PLC控制系统、自动排料装置等部分组成。
其结构简图见附图1。
1)机体:机体由厚钢板焊接而成,沿跳汰机纵向可分为单段、两段或多段。
每段又分成2个或3个隔室,每个隔室都设有空气室、风阀和筛下顶水管。
工作过程中,水流形成一个单独的U形振荡体,洗水脉动互不干扰,减少能耗,同时也防止在进气期或排气期内洗水撞击,使洗水平稳升降,改善了物料的分选条件。
机体内的筛板采用倒锥形孔筛板,可避免筛孔堵塞。
2)风阀装置:采用数控气动立式滑阀。
跳汰机在工作时通过控制风阀实现进气、膨胀、排气、休止等4个连续过程,完成一个脉动周期。
每一个室需要一个进气阀和一个排气阀共同配合来完成上述四个过程,实现跳汰机的脉动,达到物料分层的目的。
而每一个风阀的开闭是通过数控风阀控制器控制电磁阀的换向,从而控制高压风(0.8Mpa)驱动气缸来完成的。
1. PID调试步骤没有一种控制算法比PID调节规律更有效、更方便的了。
现在一些时髦点的调节器基本源自PID。
甚至可以这样说:PID调节器是其它控制调节算法的吗。
为什么PID应用如此广泛、又长久不衰?因为PID解决了自动控制理论所要解决的最基本问题,既系统的稳定性、快速性和准确性。
调节PID的参数,可实现在系统稳定的前提下,兼顾系统的带载能力和抗扰能力,同时,在PID调节器中引入积分项,系统增加了一个零积点,使之成为一阶或一阶以上的系统,这样系统阶跃响应的稳态误差就为零。
由于自动控制系统被控对象的千差万别,PID的参数也必须随之变化,以满足系统的性能要求。
这就给使用者带来相当的麻烦,特别是对初学者。
下面简单介绍一下调试PID参数的一般步骤:1.负反馈自动控制理论也被称为负反馈控制理论。
首先检查系统接线,确定系统的反馈为负反馈。
例如电机调速系统,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。
其余系统同此方法。
2.PID调试一般原则 a.在输出不振荡时,增大比例增益P。
b.在输出不振荡时,减小积分时间常数Ti。
c.在输出不振荡时,增大微分时间常数Td。
3.一般步骤 a.确定比例增益P 确定比例增益P 时,首先去掉PID的积分项和微分项,一般是令Ti=0、Td=0(具体见PID的参数设定说明),使PID为纯比例调节。
输入设定为系统允许的最大值的60%~70%,由0逐渐加大比例增益P,直至系统出现振荡;再反过来,从此时的比例增益P逐渐减小,直至系统振荡消失,记录此时的比例增益P,设定PID的比例增益P为当前值的60%~70%。
比例增益P调试完成。
b.确定积分时间常数Ti 比例增益P确定后,设定一个较大的积分时间常数Ti的初值,然后逐渐减小Ti,直至系统出现振荡,之后在反过来,逐渐加大Ti,直至系统振荡消失。
记录此时的Ti,设定PID的积分时间常数Ti为当前值的150%~180%。

XMK-2型温度控制器------------------------------------使用说明书功能:1、被控对象的温度测量和显示;2、温度上、下限的设定被控设备的开停控制;3、制冷和制热两种控制模式选择;4、温度传感器故障显示(开路或短路);5、用户可修正显示温度;6、全量程0.1℃分辨率;7、制冷模式时压缩机停机延时3分钟保护;一、功能和操作:1.通电温度显示:控制器通电后显示“---”,约3秒后显示实际温度测量值。
2.参数设定:(1)进入设定状态:为了防止误操作和避免闲人玩弄,必须连按“set(设置)”键三下,才能进入设定状态。
(2)控制器进入设定状态后,首先显示上限设定提示符为“H--”(高,即下限),首次按“▲”健或“▼”键显示上限设定值,再次按“▲”健或“▼”键改变上限设定值;此时可按“▲”健或“▼”键改变设定值,直至符合要求(设定为负值时,负号闪烁);再次按“set(设置)” 显示下限设定提示符为“L--”(低,即下限),设定方法同上;再次按“set(设置)”显示显示修正温度提示符为“C--”,设定方法同上;再次按“set(设置)” 显示显示控制模式提示符为“J--”,首次按“▲”健或“▼”键显示当前控制模式(CC:制冷,HH:制热),按“▲”健选择制冷控制模式,制冷模式指示灯点亮,按“▼”键选择制热控制模式,制热模式指示灯点亮。
(3)当上限设定值≤下限设定值,本控制器自动调正上限设定值=下限设定值+l℃。
(4)退出设定:15秒之内不按任何一个键,控制器自动退出设定状态,并自动保存设定值,显示屏上仍显示温度测量值。
敬告一:修改设定值后必需再按一下“set”键,使设定值得以确认并储存,否则控制器不能按新的设定值进行控制。
敬告二:若设定完后未经延时退出就(断电)关机,新设定值将得不到保存,控制器仍按原设定值运行。
(5)显示屏显示温度=实际温度+温度修正值,一般情况下,修正值设定为0。

智能温度调节仪使用说明书(PID)(使用此产品前,请仔细阅读说明书,以便正确使用,并请妥善保存,以便随时参考)一、概述本仪表由单片机控制,具有热电阻、热电偶等多种信号自由输入,五种输出方式只须插上相应模块即可,正反控制任意设置;提供了四种报警方式;手动自动切换,主控有两位式、PID两种控制方式,在各种不同的系统上,经仪表自整定的参数大多数能得到满意的控制效果,具有无超调,抗扰动性强等特点。
二、主要技术指标1、基本误差:±0.5%F.S±1个字2、冷端补偿误差:≤±2.0℃3、采样周期: 0.5秒4、控制周期:继电器输出时的控制周期为2~120秒可调,其它为2秒。
5、继电器触点输出:AC220V/5A(阻性负载)或AC220V/0.3A(感性负载)6、驱动固态继电器信号输出:驱动电流≥15mA,电压≥9V7、驱动可控硅脉冲输出:幅度≥3V,宽度≥40us的移相或过零触发脉冲’.K8、连续PID调节模拟量输出:0~10mA(负载500±200Ω), 4~20mA(负载250±100Ω),或0~5V(负载≥100kΩ), 1~5V(负载≥100kΩ)9、电源:AC85V~242V(开关电源), 50/60Hz,或其它特殊定货10、工作环境:温度0~50.0℃,相对湿度不大于85%的无腐蚀性气体及无强电磁干扰的场所三、型号意义XMT □9 □□□□⑴⑵ (3) (4) (5)⑴外型及开孔尺寸(mm):空格:160×80×120 152×76;A:96×96×110 92×92;D:72×72×110 68×68;E:48×96×110 44×92;F:96×48×110 92×44;S:80×160×120 76×156;G:48×48×110 44×44⑵控制方式:‘0’位式控制继电器输出,‘2’三位式控制继电器输出;‘4’PID调节继电器输出;‘5’PID 调节固态继电器输出;‘6’单项移相可控硅调节输出;‘7’单项过零可控硅调节输出;‘8’三项过零可控硅调节输出;‘9’连续PID标准电流信号输出;⑶附加报警:‘0’:无报警;‘1’或‘2’:一组报警(报警方式可选);‘3’:二组报警(报警方式可选);‘5’:声音报警;⑷输入信号类型:‘1’:热电偶信号输入;‘2’:热电阻信号输入;‘W’:自由信号输入⑸主控制方式:‘V24’:附加隔离24V电源(25mA)四、面板说明(参考)(1)PV显示窗:正常显示情况下显示温度测量值;在参数修改状态下显示参数符号。

DWSK-2系列智能温湿度控制器使用说明书北京迪辉科技有限公司DWSK-2型是智能型温湿度双数显数显温湿度测量控制仪表,与温湿度传感器配接可构成各种量程和规格的温湿度测控系统。
可广泛适用于蔬菜大棚通讯机房、办公室、厂矿、车间、仓库、医院、档案馆、博物馆、暖通空调、楼宇自控等环境的温湿度测量主要特点:◆主机采用当今最先进的ATMEL单片微机作主机,减少了外围部件,提高了可靠性。
◆配接CMOS数字型温湿度传感器◆采用WATCHDOG电路、软件陷阱与冗余、掉电保护、数字滤波等技术,注重现场容错能力,使整机具有很强的抗干扰能力。
◆采用双四位LED数码管显示,可分别实时显示每个回路的测量值。
二、主要技术指标:基本误差:0.2%FS±1个字分辨力:温度:+0.1℃湿度:+0.1%RH显示:双四位LED数码管红色:代表温度黄色:代表湿度精度:温度:+0.5℃湿度:+3%RH测量范围:温度(-20~80)℃(普通型)温度(-40~120)℃(高温型)湿度:0~100%RH输入信号:数字型温湿度传感器报警输出:2个继电器输出(220VAC/5A30V/7A)每个回路都可以设定上下限报警(温度上、下限和湿度上、下限)电源:开关电源180~260VAC功耗:4W环境温度:(-10~80)℃环境湿度:<85%RH外形尺寸:96mm×48mm×110mm三、操作说明Ⅰ、按键功能说明“SET”—在设定状态时,用于存贮参数的新设定值并选择下一个设定参数。
“▲”—在设定状态时,用于增加设定值。
“▼”—在设定状态时,用于减少设定值。
“A/M”—备用Ⅱ、上电自检⑴按仪表的端子接线图连接好仪表的电源、输入、输出、报警等接线。
⑵仔细检查仪表的接线,正确无误后方可打开电源。
⑶接通电源后仪表显示相应的温度和湿度值Ⅲ、操作说明在设定状态下,仪表上排数码管显示参数提示符,下排数码管显示设定值;工作状态下,上排红色数码管显示温度的测量值,下排黄色数码管显示湿度的测量值。
使用说明书U-HSX1300-MICN2 1.产品介绍傻瓜式模糊PID温控器/调节仪采用模糊PID算式,无需人工整定参数,控温精度基本达±0.5℃,无超调、欠调,性价比高。
傻瓜式操作,7款外型尺寸,支持33种信号输入功能,可与各类传感器、变送器配合使用,实现对温度、压力、液位、容量、力等物理量的测量显示,并配合各种执行器对电加热设备和电磁、电动阀进行PID调节和控制、报警控制、数据采集等功能。
适用于工业炉,电炉,烘箱,试验设备,制鞋机械,注塑机械,包装机械,食品机械,印刷机械等行业。
支持2路报警功能,支持1路控制输出或支持采用标准MODBUS RTU协议的RS485通讯接口,1路DC24V配电输出。
输入端、输出端、电源端光电隔离。
100-240VAC/DC或12-36V DC开关电源供电,标准卡入式安装,工作环境温度在0-50℃,且相对湿度5-85%RH无凝结。
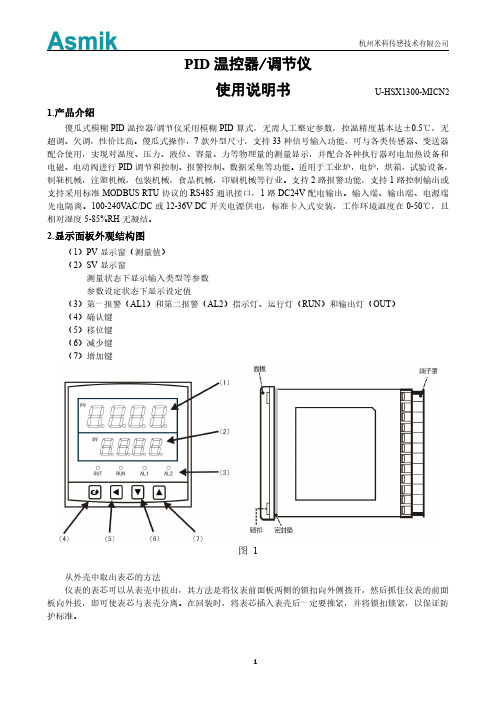
2.显示面板外观结构图(1)PV显示窗(测量值)(2)SV显示窗测量状态下显示输入类型等参数参数设定状态下显示设定值(3)第一报警(AL1)和第二报警(AL2)指示灯、运行灯(RUN)和输出灯(OUT)(4)确认键(5)移位键(6)减少键(7)增加键图1从外壳中取出表芯的方法仪表的表芯可以从表壳中拔出,其方法是将仪表前面板两侧的锁扣向外侧拨开,然后抓住仪表的前面板向外拔,即可使表芯与表壳分离。
在回装时,将表芯插入表壳后一定要推紧,并将锁扣锁紧,以保证防护标准。
外形尺寸开孔尺寸外形尺寸开孔尺寸160*80mm(横式)152*76mm48*96mm(竖式)45*92mm 80*160mm(竖式)76*152mm72*72mm(方式)68*68mm 96*96mm(方式)92*92mm48*48mm(方式)45*45mm 96*48mm(横式)92*45mm3.接线图2规格尺寸为A、B、C、D、E型接线图注:横竖式仪表后盖接线端子方向不一样,见示意图3图3图4规格尺寸为F型接线图图5规格尺寸为H型接线图注1:上述接线图中在同一组端子标有不同功能的,只能选择其中一种功能。
目录一、概述 (2)二、主要技术指标 (2)三、面板形式 (3)四、型号和开孔对照表 (3)五、安装与接线 (3)六、按键功能与指示灯说明 (6)七、设置流程图 (8)八、参数设置符号意义解释表 (10)九、使用 (11)十、抗干扰级别设置 (12)十一、显示精度校准 (13)十二、校准流程图 (14)十三、PID控制 (14)十四、一般常见故障 (16)十五、通信协议 (19)十六、仪表的保管和维护 (20)一、概述LDC系列智能化数字调节仪采用了我公司自行研制开发、委托日本集成电路制造商定制生产的专用微型单片机电路,它博采众长,汇集了目前自动控制系统中各类调节仪表的大部份功能,经过多年现场验证,本仪表独具以下特色:㈠由于采用了大规模的集成电路,结构简单,性能卓越,寿命更长。
无飞线、无调整电位器,所有的功能由软件完成。
㈡输入信号每秒50次的高速采样,使得本仪表相对于同类仪表的精度更高、性能更稳,抗干扰能力更强。
可由用户自己设定的六个类别近百种级别的抗干扰模式,使本仪表能够适应各种条件下的工作环境;可高精度隔离变送输出;仪表自馈的直流24V恒压源,可满足各种两线制变送器的需求。
校准由软件处理,部分参量可现场标定。
㈢最大可达到8种热电偶、5种热电阻(小量程Pt100X)、5种线性电压、3种线性电流输入,1种频率输入信号。
㈣PID控制量光电隔离输出。
多种PID默认调节模式满足各种需求。
过零触发的PID调节器,可外接驱动大到500A的三相可控硅,省去ZK系列可控硅触发器,可为用户提高经济效益。
手/自动无扰动切换功能,保证了系统的安全、稳定、可靠。
㈤可实现PID连续电流输出+时间比例调节的冷输出控制。
也可实现自学习,自整定功能,操作方便,控制精确。
㈥最多可实现五个开关量输出,四个位式报警输出口,可任意组态出上下限报警、Ok报警、绝对值报警、关联报警等多种报警方式,还可对报警点的进行监控输出。
特别的断线报警功能,断线报警时仪表将自动锁定报警前的输出状态。
SKT系列跳汰机PLC控制系统安装使用说明书天地科技股份有限公司唐山分公司跳汰选煤工程部目录一.前言二.系统简介三.系统安装与调试四.系统操作五.系统维护及常见问题处理六.附录前言现代工矿企业里,用PLC作为控制部分的设备应用的越来越多,同时PLC 的种类也越来越多,而基于每一品牌的PLC所构成的控制系统又各有属于自己的一套操作和编程方法,为了方便用户早日了解和掌握该控制系统的操作与日常维护,特编写了本说明书。
本说明书将就以下几部分展开说明:一,系统简介二,系统安装与调试三,系统操作四,系统维护关于PLC的资料参阅<SC—500 PLC(SC—500 Series CPUs)用户使用手册>本控制系统电气原理图详见我们随本说明书附送的电气图纸。
一系统简介本系统是SKT系列跳汰机的数字控制部分,主要由浮标、传感器、控制柜三部分组成。
浮标将跳汰机床层的厚度测出来,测出来的床层信号经传感器转变为可被控制柜识别的电信号,直接送到控制柜,控制柜经过对该信号的处理去控制跳汰机洗煤。
由此可见浮标是该控制系统的核心。
控制柜主要由中达—斯米克PLC、触摸屏以及直流电机调速箱组成,与以前的控制柜相比,体积更小,重量更轻,工作更可靠,操作更方便。
它不仅能完成原来控制柜所能完成的功能,而且还增加了许多新的功能,如对给煤机的控制、对电动风门和水门的控制、可以接受原煤和精煤的灰分等新的功能,这些功能本着用户的实际需要各有不同。
本系统将所有控制设备都集成在一个控制柜子里,使系统看上去更简洁、美观,而且它还易于扩展,大大方便了用户以后的设备改造和扩大生产规模,充分体现了本公司‘一切为用户着想’的宗旨。
PLC采用交流电源电压220V供电,可驱动和控制交、直流电,其驱动和控制的点数可按用户的要求灵活的设计。
本说明书着重对PLC及触摸屏的操作进行了介绍,但实际中的操作有时需要对其它的相关控制设备进行操作,这些我们都放在了相应位置的注意里了,如有不便望你原谅。
目录1.一般安全措施general safety measures (1)2.安装设置installation settings (1)2-1运输注意事项Transportation notice (1)2-2组装场所Assembly site (2)2-3配管piping。
(2)2-4电器配线Electrical wiring (3)3.运转操作Operation (3)3-1运转前检查项目Inspection items before operation (3)3-2控制操作Control operation (3)4.维修保养Maintenance (4)4-1清理Clear (4)4-2储存Storage (5)5.故障排除Trouble shooting (5)5-1渗漏leakage (5)5-2异常报警及排除Exception alarm and troubleshooting (5)1.一般安全措施在使用本冷却机前,请先详细了解这些安全要求。
使用本冷却机时请遵守这些安全要求以避免火灾、电击或人身伤害。
(1)维持工作区域干净并通风良好,杂乱或昏暗的环境易造成意外。
(2)不可在危险环境操作:请勿在潮湿、被雨淋或有潜在爆炸性的场所使用本冷却机。
(3)勿使儿童接近:所有非操作人员皆应在工作区域之外的安全场所。
(4)使用适当的电线:请使用可承受本冷却机额定电流且状况良好的电源线。
(5)请勿堆积物品在本冷却机上:请勿在冷却机上方放置任何物品,物品掉落容易造成人身伤害或机械损伤。
(6)更换电线前,请先将电源关闭。
(7)若有任何修理或更换零件时,请注意下列事项:(A)首先请将操作开关关闭,并切掉电源,再更换零件。
(B)若需要用到气焊的场合,请避免火直接碰到油或油气而产生火灾。
(C)若需要排放冷媒时,请在通风良好的场所排放,以免窒息。
2.安装设置本冷却机是为精密机械而设计的水冷却装置,它在精密机械上,能提供高精度的水温控制。

XM系列智能仪表使用手册XMA数字显示PID控制仪1一、概述XMA系列数字显示PID控制仪,是以微电脑为核心的新一代智能化仪表。
可配合多种标准传感器或变送器,对温度、压力、液位、流量、重量等各种工业过程参数进行测量、显示与PID控制。
是一种高性能、多功能的智能化仪表,广泛适用于冶金、能源、建材、轻工等工业部门。
特点如下:1.软件运算进行线性化处理,线性化精度高2.通用性好,同一块仪表可混合使用不同分度号的测温元件3.按键修改仪表参数,掉电不丢失信息4.采用先进的数字自动调校系统.测量值零点迁移功能.测量值增益放大功能.变送输出零点迁移功能.变送输出增益放大功能5.采用国际通用卡入式结构,安装、维修、更换十分方便6.安装尺寸与传统仪表兼容,互换性好7.具有4~20mA或0~10mA输出8.自动稳零功能随时消除零点漂移9.具有热电偶冷端温度自动补偿功能10.传感器分度号可任意设定,即设即用,无需重新校表二、主要技术指标1.输入信号:◆毫伏信号:热电偶和霍尔变送器,输入阻抗>1MΩ◆电阻信号:热电阻和远传压力表,三线制接法2◆电流信号:0~10mA,4~20mA,输入阻抗≤250Ω◆电压信号:0~5V,1~5V,输入阻抗≥100KΩ2.显示范围:-1999~19993.测量精度:%FS或%FS4.分辨率:1、、或5.热电偶冷端补偿范围:0~50℃- 1 -6.输出信号:◆开关量输出:继电器ON/OFF带回差,触点容量为3A/220VAC(阻性负载,感性负载需加灭弧元件)◆馈电输出:DC24V,负载能力≤30mA◆模拟量输出:DC0~10mA(负载电阻≤750Ω)DC4~20mA(负载电阻≤500Ω)DC0~5V(输出电阻≤250Ω)DC1~5V(输出电阻≤250Ω)8.使用环境:环境温度:0~40℃相对湿度:≤85RH避免腐蚀性气体9.供电电源:线性电源:AC220C±10% 开关电源:AC9010.功耗:线性电源:≤5W 开关电源:≤4W11.重量;≤500克12.安装方式:盘装卡入式313.仪表外形及开孔尺寸:- 2 -三、操作方式(一) 仪表按键说明:“S”键:在正常工作方式下,按该键可进入设置方式;在设置方式下,该键用于确认输入数据;在设置过程中,按该键3秒后,将退出设置方式。

目录内容提要写作提纲正文一、资产减值准备的理论概述 (4)(一)固定资产减值准备的概念 (4)(二)固定资产减值准备的方法 (5)(三)计提资产减值准备的意义 (5)二、固定资产减值准备应用中存在的问题分析 (5)(一)固定资产减值准备的计提模式不固定 (5)(二)公允价值的获取 (6)(三)固定资产未来现金流量现值的计量 (7)(四)利用固定资产减值准备进行利润操纵 (8)三、解决固定资产减值准备应用中存在的问题的对策 (10)(一)确定积累时间统一计提模式 (10)(二)统一的度量标准 (11)(三)提高固定资产可收回金额确定方式的操作性 (11)(四)加强对固定资产减值准备计提的认识 (12)(五)完善会计监督体系 (12)参考文献 (15)内容提要在六大会计要素中,资产是最重要的会计要素之一,与资产相关的会计信息是财务报表使用者关注的重要信息。
然而长期以来,我国的企业普遍存在资产不实、利润虚增的情况,从而使资产减值问题一度成为我国会计规范的热点问题。
人们也期望通过会计上的法律法规减少信息的不对称,让企业向广大投资者提供真实有效的信息。
在企业生产经营过程中,资产减值是一个不可避免的现象,本文通过对新旧会计准则的对比,针对会计实务中对资产减值准备会计处理,分析资产减值准备在会计实务操作中的存在的问题,并对新会计准则下的会计处理方法进行分析与评价,进而提出解决问题的方法,阐述了资产减值准备提取在实务操作中面临的境况。
从资产减值准备入手,对固定资产减值准备进行分析,提出了计提标准不恰当,计提时间未作统一规定等问题,并针对存在的问题提出了分析方法等对策。
写作提纲一、资产减值准备的理论概述(一)固定资产减值准备的概念(二)固定资产减值准备的方法(三)计提资产减值准备的意义二、固定资产减值准备应用中存在的问题分析(一)固定资产减值准备的计提模式不固定(二)公允价值的获取(三)固定资产未来现金流量现值的计量(四)利用固定资产减值准备进行利润操纵三、解决固定资产减值准备应用中存在的问题的对策(一)确定积累时间统一计提模式(二)统一的度量标准(三)提高固定资产可收回金额确定方式的操作性(四)加强对固定资产减值准备计提的认识(五)完善会计监督体系固定资产减值准备问题的探讨随着我国经济的发展,市场经济日益完善,大众对企业会计信息披露要求也逐步提高。

北京安控科技发展有限公司4.PID模块控制目录概述..............................................................123 PID控制介绍........................................................124 比例控制 (124)开/关控制 (125)比例积分控制 (126)比例积分微分控制 (127)串级控制 (128)套炉控制 (128)球磨机控制 (129)比率/偏压控制 (129)时间比例输出 (130)平方根线性化 (131)平方根标准化 (132)控制块介绍.........................................................133 控制块的特点 (133)后台运行 (133)独立的取样时间 (133)应用程序存取 (133)终止积分 (134)输出极限 (134)平方根提取 (134)外部执行禁止 (134)自动报警扫描 (134)静带 (134)存取控制块.........................................................135 C语言函数 (135)位设置 (135)位清除 (136)梯形逻辑函数 (136)控制块变量.........................................................137 变量介绍 (137)报警输出地址-AO (138)串级调整点源-CA (138)控制寄存器-CR (138)静带-DB (138)递减输出-DO (139)误差-ER (139)全范围输出-FS (139)增益-GA (139)高温报警-HI (140)输入偏压-IB (140)禁止执行输入-IH (140)积分误差-IN (141)递增输出-IO (141)输入源-IP (141)低温报警-LO (142)输出偏压-OB (142)输出数值-OP (143)过程值-PV (143)微分时间-RA (143)复位时间-RE (143)调整点-SP (143)状态寄存器-SR (143)零范围输出-ZE (144)控制块输入概念.....................................................145 常量块输入 (145)过程模拟 (145)信号调节 (145)模拟块输入 (145)输入信道块输入 (145)输出信道块输入 (146)块输出块输入 (146)流体混合控制 (146)输出跟踪 (146)控制块输出概念.....................................................147 块输出类型 (147)模拟输出 (147)时间比例输出 (147)假模拟输出 (148)输出极限 (148)零范围输出极限 (148)全范围输出极限 (149)模拟块输出极限 (149)时间比例输出极限 (149)假模拟输出极限 (149)内部块输出极限 (149)控制块调整点概念....................................................150 常数调整点 (150)串级调整点 (150)远程块调整点 (150)倾斜调整点 (151)控制寄存器.........................................................152 块报警 (153)绝对级报警 (153)偏差报警 (153)变化率报警 (153)手控方式 (153)调整点跟踪 (154)I/O规格 (154)拥有V.1.23版或更新固件的控制器 (154)拥有V.1.22或更旧版固件的控制器 (154)状态寄存器.........................................................155 报警应答位 (155)控制块执行.........................................................156 突变接合 (156)非突变接合 (156)C语言程序 (156)梯形逻辑语言程序 (157)配置控制块.........................................................159 寄存器分配 (159)配置PID控制器 (159)模拟输出 (159)时间比例输出 (161)配置比率/偏压控制器 (163)配置串级控制器 (164)配置主控制器 (164)配置从控制器 (164)配置自动报警 (165)禁用自动报警 (166)配置实例...........................................................167 报警:高温报警 (167)报警:高温和低温报警 (168)PID控制:模拟输出 (168)PID控制:模拟输出和报警 (170)PID控制:单作用时间比例输出 (171)PID控制:双重作用时间比例输出 (172)PID控制:串级控制器 (172)PID控制:流量控制的平方根线性化 (175)输出跟踪 (176)比例控制 (176)批量控制 (177)调节PID控制块......................................................178 闭合环路调节:Ziegler-Nichol方法 (178)开放环路调节:Cohen-Coon方法 (179)选择执行周期 (180)PID或者比率/偏压控制器 (181)时间比例输出控制器 (181)高级控制...........................................................182 数字计算机和离散控制 (182)程序设计算法 (182)附录A:变换函数....................................................184 概述自本世纪开始以来,PID(比例、积分、微分)控制算法就一直被应用于反馈控制系统之中。