Fault Detection And Isolation
- 格式:ppt
- 大小:879.50 KB
- 文档页数:10

汽车发动机是为汽车提供动力的装置,是汽车的心脏,决定着汽车的动力性、经济性、稳定性和环保性。
下面是搜索整理的汽车发动机英文参考文献,欢迎借鉴参考。
汽车发动机英文参考文献一:[1]Barouch Giechaskiel,Ricardo Suarez-Bertoa,Tero L?hde,Michael Clairotte,Massimo Carriero,Pierre Bonnel,Maurizio Maggiore. Evaluation of NO x emissions of a retrofitted Euro 5 passenger car for the Horizon prize “Engine retrofit”[J]. Environmental Research,2018,166.[2]Shixuan Wang,Ying Liu,Carla Di Cairano-Gilfedder,Scott Titmus,Mohamed M. Naim,Aris A. Syntetos. Reliability Analysis for Automobile Engines: Conditional Inference Trees[J]. Procedia CIRP,2018,72.[3]Kévin Rosset,Violette Mounier,Eliott Guenat,Jürg Schiffmann. Multi-objective optimization of turbo-ORC systems for waste heat recovery on passenger car engines[J]. Energy,2018,159.[4]Mohamed Kamal Ahmed Ali,Hou Xianjun,Mohamed A.A. Abdelkareem,M. Gulzar,A.H. Elsheikh. Novel approach of the graphene nanolubricant for energy saving via anti-friction/wear in automobile engines[J]. Tribology International,2018,124.[5]Shweta Tripathi,K.A. Subramanian. Control of fuel spray wall impingement on piston bowl in palm acid oil biodiesel fueled direct injection automotive engine using retarded injection timing, EGR and increased compression ratio[J]. Applied Thermal Engineering,2018,142.[6]Gianfranco Gagliardi,Francesco Tedesco,Alessandro Casavola. A LPV modeling of turbocharged spark-ignition automotive engine oriented to fault detection and isolation purposes[J]. Journal of the Franklin Institute,2018.[7]Gritsada Sua-Iam,Natt Makul. Innovative utilization of foundry sand waste obtained from the manufacture of automobile engine parts as a cement replacement material in concrete production[J]. Journal of Cleaner Production,2018.[8]Kanhu Charan Nayak,Prashant P. Date. Manufacturing of light automobile engine piston head using sheet metal[J]. Procedia Manufacturing,2018,15.[9]Yisong Chen,Jinqiu Ma,Bin Han,Peng Zhang,Haining Hua,Hao Chen,Xin Su. Emissions of automobiles fueled with alternative fuels based on engine technology: A review[J]. Journal of Traffic and Transportation Engineering (English Edition),2018.[10]Xinfeng Zhang,Minghui Luo,Wei Dai,Chuanqi Yao,Jiwen Wang,DaojinHuang,Chunyang Wang. Automotive fuel cell engine test cell design and its thermal flow analysis[J]. International Journal of Hydrogen Energy,2018.[11]K. Sato,T. Sadahiro,M. Yamazaki,M. Iwase. Throttle Valve Control of Automotive Engine based on Boundary Model[J]. IFAC PapersOnLine,2018,51(13).[12]Ajay Kumar Maddineni,Dipayan Das,Ravi Mohan Damodaran. Numerical Investigation of Pressure and Flow characteristics of Pleated Air Filter System for Automotive Engine Intake Application[J]. Separation and Purification Technology,2018.[13]Masahiro Yamazaki,Kotoru Sato,Katsuya Shinozaki,Masami Iwase. Boundary Modeling and Identification of Normal Operation for Automobile Engine[J]. IFAC PapersOnLine,2018,51(31).[14]Guo Bin,Chen Hong,Song Dafeng. Research on Fast Matching Method of Power System Parameters of Parallel Hybrid Electric Vehicles[J]. IFAC PapersOnLine,2018,51(31).[15]Natália de Assis Brasil Weber,Bárbara Pacheco da Rocha,Paulo Smith Schneider,Luiz Carlos Daemme,Renato de Arruda Penteado Neto. Energy and emission impacts of liquid fueled engines compared to electric motors for small size motorcycles based on the Brazilian scenario[J]. Energy,2019,168.[16]Francesco Del Pero,Massimo Delogu,Marco Pierini. Life Cycle Assessment in the automotive sector: a comparative case study of Internal Combustion Engine (ICE) and electric car[J]. Procedia Structural Integrity,2018,12.[17]Shan Lin,Li Zhao,Shuai Deng,Jiaxin Ni,Ying Zhang,Minglu Ma. Dynamic performance investigation for two types of ORC system driven by waste heat of automotive internal combustion engine[J]. Energy,2019,169.[18]Zhang Jian,Piao Zhong-yu,Liu Shi-ying,Su Sheng-wei,Deng Li-jun. Investigation of wear behavior of graphite coating on aluminum piston skirt of automobile engine[J]. Engineering Failure Analysis,2019.[19]Karsten Wittek,Frank Geiger,Jakob Andert,Mario Martins,Vitor Cogo,Thompson Lanzanova. Experimental investigation of a variable compression ratio system applied to a gasoline passenger car engine[J]. Energy Conversion and Management,2019,183.[20]Adnan Kadhim Rashid,Mohd Radzi Abu Mansor,Alexandru Racovitza,Radu Chiriac. Combustion Characteristics of Various Octane Rating Fuels for Automotive Thermal Engines Efficiency Requirements[J]. Energy Procedia,2019,157.[21]Marlon Cadrazco,Alexander Santamaría,John R. Agudelo. Chemical and nanostructural characteristics of the particulate matter produced by renewable diesel fuel in an automotive diesel engine[J]. Combustion and Flame,2019,203.[22]Kenneth Holmberg,Ali Erdemir. The impact of tribology on energy use and CO 2 emission globally and in combustion engine and electric cars[J]. Tribology International,2019,135.[23]Hongli Gao,Fujun Zhang,Sufei Wang,Hao Wu,Zhengkai Wang. Effect of Characteristic Parameters on the Magnetic Properties of Voice Coil Motor for Direct Fuel Injection in Gasoline Engine[J]. Energy Procedia,2019,158.[24]Xunan Gao,Bojan Savic,Roland Baar. A numerical procedure to model heat transfer in radial turbines for automotive engines[J]. Applied Thermal Engineering,2019,153.[25]Senthil Kumar Kandasamy,Arun Saco Selvaraj,Thundil Karuppa Raj Rajagopal. Experimental investigations of ethanol blended biodiesel fuel on automotive diesel engine performance, emission and durability characteristics[J]. Renewable Energy,2019,141.[26]Ganesh Duraisamy,Murugan Rangasamy,Nagarajan Govindan. A comparative study on methanol/diesel and methanol/PODE dual fuel RCCI combustion in an automotive diesel engine[J]. Renewable Energy,2020,145.[27]Nosratollah Izadiamoli,Hoseyn Sayyaadi. Conceptual design, optimization, and assessment of a hybrid Otto-Stirling engine/cooler for recovering the thermal energy of the exhaust gasses for automotive applications[J]. Energy Conversion and Management,2018,171.[28]Federico Millo,Pranav Arya,Fabio Mallamo. Optimization of automotive diesel engine calibration using genetic algorithm techniques[J]. Energy,2018,158.[29]Yonggyu Lee,Seungmook Oh,Changup Kim,Junsun Lee,Kanghun Lee,Junghwan Kim. The dual-port fuel injection system for fuel economy improvement in an automotive spark-ignition gasoline engine[J]. Applied Thermal Engineering,2018,138.[30]S. d'Ambrosio,A. Ferrari,D. Iemmolo,A. Mittica. Dependence of combustion noise on engine calibration parameters by means of the response surface methodology in passenger car diesel engines[J]. Applied Thermal Engineering,2019.汽车发动机英文参考文献二:[31]Ivan Bortel,Ji?í Vávra,Michal Takáts. Effect of HVO fuel mixtures onemissions and performance of a passenger car size diesel engine[J]. Renewable Energy,2019,140.[32]Jaeho Cho,Kangjin Kim,Sungha Baek,Cha-Lee Myung,Simsoo Park. Abatement potential analysis on CO 2 and size-resolved particle emissions from a downsized LPG direct injection engine for passenger car[J]. Atmospheric Pollution Research,2019.[33]Jamie Sleigh,Catherine E. Warnaby. Finding the starter motor for the engine of consciousness[J]. British Journal of Anaesthesia,2019,123(3).[34]S. Prakash,M. Prabhahar,S. Sendilvelan,R. Venkatesh,Sanjay Singh,K. Bhaskar. Experimental studies on the performance and emission characteristics of an automobile engine fueled with fish oil methyl ester to reduce environmental pollution[J]. Energy Procedia,2019,160.[35]Sabino Caputo,Federico Millo,Giulio Boccardo,Andrea Piano,Giancarlo Cifali,Francesco Concetto Pesce. Numerical and experimental investigation of a piston thermal barrier coating for an automotive diesel engine application[J]. Applied Thermal Engineering,2019,162.[36]Nicole D?rr,Adam Agocs,Charlotte Besser,Andjelka Risti?,Marcella Frauscher. Engine Oils in the Field: A Comprehensive Chemical Assessment of Engine Oil Degradation in a Passenger Car[J]. Tribology Letters,2019,67(3).[37]Sumanchandran Devendran,Rajeshkumar Ramasamy,Varatharaj Neelakandan,Thulasirajan Ganesan,Praveen Chakrapani Rao. Failure assessment using accelerated testing on IC engine’s starter motor for reliability improvement[J]. Life Cycle Reliability and Safety Engineering,2019,8(2).[38]Jaegu Choi,Jongmin Lee,Namgyu Jun,Chang-Sung Seok,Sunghwan Park,Gayeon Kim. Development of Laboratory Fatigue Testing Apparatus for Automotive Vehicle Engine Valve Simulating Actual Operating Conditions[J]. International Journal of Precision Engineering and Manufacturing,2019,20(7).[39]Pavel Nicolaie,Chiriac Radu,Birtas Adrian,Draghici Florin,Dinca Mihai. On the improvement by laser ignition of the performances of a passenger car gasoline engine.[J]. Optics express,2019,27(8).[40]Ahmadipour Fatemeh,Esmaeili Sari Abbas,Bahramifar Nader. Characterization, concentration and risk assessment of airborne particles using car engine air filter (case study: Tehran metropolis).[J]. Environmental geochemistry and health,2019.[41]Sleigh Jamie,Warnaby Catherine E. Finding the starter motor for the engine of consciousness.[J]. British journal of anaesthesia,2019,123(3).[42]Derry Matthew J,Smith Timothy,O'Hora Paul S,Armes Steven P. Block Copolymer Nanoparticles Prepared via Polymerization-Induced Self-Assembly Provide Excellent Boundary Lubrication Performance for Next-Generation Ultralow-Viscosity Automotive Engine Oils.[J]. ACS applied materials & interfaces,2019.[43]. Hyundai Motor Company; Patent Issued for Continuous Variable Valve Duration Apparatus And Engine Provided With The Same (USPTO 10,060,307)[J]. Journal of Engineering,2018.[44]. Mazda Motor Corporation; Patent Issued for Engine Control Device (USPTO 10,060,372)[J]. Journal of Engineering,2018.[45]. Automotive Engine Market 2018 Global Industry Outlook By Size, Key Players, Trends, Share, Suppliers, Statistics, Sales, Growth, And Regional Forecast To 2023[J]. M2 Presswire,2018.[46]. Mathematics - Applied Mathematics; Researchers at University of Calabria Report New Data on Applied Mathematics (A LPV modeling of turbocharged spark-ignition automotive engine oriented to fault detection and isolation purposes)[J]. Journal of Transportation,2018.[47]. Ford Global Technologies LLC; "Hybrid Module, Hybrid Unit And Motor Vehicle As Well As Starting Process For An Internal Combustion Engine" in Patent Application Approval Process (USPTO 20180238291)[J]. Politics & Government Week,2018.[48]. Mazda Motor Corporation; Patent Application Titled "Engine Control Device" Published Online (USPTO 20180245529)[J]. Energy Weekly News,2018.[49]. Hitachi Automotive Systems Ltd.; "Cooling Device For Internal Combustion Engine Of Vehicle And Control Method Thereof" in Patent Application Approval Process (USPTO 20180245504)[J]. Journal of Transportation,2018.[50]. Automotive Engine Valves Market 2018 Global Industry Size, Key Player, Share, Mergers, Acquisition, Growth Analysis By Valves Type, Technology, Fuel Type, Vehicle And Region To 2023[J]. M2 Presswire,2018.[51]. Litens Automotive Partnership; Patent Issued for Isolator For Use With Engine That Is Assisted Or Started By An MGU Or A Motor Through An Endless Drive Member (USPTO 10,060,502)[J]. Journal of Engineering,2018.[52]. Honda Motor Co. Ltd.; Patent Issued for Supercharged Engine (USPTO 10,060,337)[J]. Journal of Engineering,2018.[53]. Hyundai Motor Company; Patent Issued for Method Of And System For Generating Virtual Engine Sound (USPTO 10,059,260)[J]. Journal of Engineering,2018.[54]. Suzuki Motor Corporation; Researchers Submit Patent Application, "Lubrication Structure For Internal Combustion Engine", for Approval (USPTO 20180238203)[J]. Politics & Government Week,2018.[55]. Energy; Studies from Brunel University in the Area of Energy Described (Expander Technologies for Automotive Engine Organic Rankine Cycle Applications)[J]. Journal of Engineering,2018.[56]. Hitachi Automotive Systems Ltd.; Patent Application Titled "Cooling Device For Internal Combustion Engine Of Vehicle And Control Method Thereof" Published Online (USPTO 20180245503)[J]. Journal of Transportation,2018.[57]. Honda Motor Co.Ltd.; Patent Application Titled "Internal Combustion Engine For Vehicle" Published Online (USPTO 20180245509)[J]. Politics & Government Week,2018.[58]. Honda Motor Co. Ltd.; Patent Issued for V Engine Having Valve Property Varying Mechanism (USPTO 10,066,553)[J]. Journal of Engineering,2018.[59]. Nissan Motor Co. Ltd.; Patent Issued for Vehicle Engine Stop Control Device (USPTO 10,065,646)[J]. Journal of Transportation,2018.[60]. Yamaha Motor Power Products Kabushiki Kaisha; Patent Issued for Engine (USPTO 10,066,522)[J]. Journal of Engineering,2018.汽车发动机英文参考文献三:[61]. Continental Automotive Systems Inc.; Patent Application Titled "Connected Energy Management And Autonomous Driving Strategy For Engine Cylinder Deactivation" Published Online (USPTO 20180238249)[J]. Journal of Transportation,2018.[62]. Honda Motor Co. Ltd.; Patent Issued for Variable Valve Mechanism For Internal Combustion Engine (USPTO 10,066,518)[J]. Journal of Engineering,2018.[63]. Suzuki Motor Corporation; Patent Issued for Engine For Outboard Motor (USPTO 10,059,416)[J]. Journal of Engineering,2018.[64]. MAHLE International GmbH; "Internal Combustion Engine For A Motor Vehicle" in Patent Application Approval Process (USPTO 20180216583)[J]. Energy Weekly News,2018.[65]. Hyundai Motor Company; "Engine Cooling System" in Patent Application Approval Process (USPTO 20180163608)[J]. Energy Weekly News,2018.[66]Jedd Cole. Grinder Simplifies Automotive Engine Part Production[J]. Modern Machine Shop,2018,91(3).[67]. Energy; Reports Outline Energy Study Results from Swiss Federal Institute of Technology in Lausanne (Multi-objective optimization of turbo-ORC systems for waste heat recovery on passenger car engines)[J]. Energy Weekly News,2018.[68]. Science - Applied Sciences; Researchers from Inha University Provide Details of New Studies and Findings in the Area of Applied Sciences (A New Method for Active Cancellation of Engine Order Noise in a Passenger Car)[J]. Science Letter,2018.[69]. Honda Motor Co. Ltd.; Researchers Submit Patent Application, "Engine Generator", for Approval (USPTO 20180283340)[J]. Energy Weekly News,2018.[70]. Mazda Motor Corporation; Patent Application Titled "Control Device Of Compression Self-Ignition Engine" Published Online (USPTO 20180283296)[J]. Energy Weekly News,2018.[71]. Continental Automotive GmbH; "High-Pressure Fuel Pump And Fuel Supply Device For An Internal Combustion Engine, In Particular Of A Motor Vehicle" in Patent Application Approval Process (USPTO 20180283336)[J]. Energy Weekly News,2018.[72]. Kia Motors Corporation; "Hybrid Vehicle And Method Of Controlling Engine Start" in Patent Application Approval Process (USPTO 20180297578)[J]. Energy Weekly News,2018.[73]. Mazda Motor Corporation; Patent Issued for Fuel Injection Control Device For Direct-Injection Engine (USPTO 10,119,492)[J]. Energy Weekly News,2018.[74]. Nissan Motor Co. Ltd.; Patent Issued for Engine Control Device And Engine Control Method (USPTO 10,119,486)[J]. Energy Weekly News,2018.[75]. Johnson Electric S.A.; "Motor, Circuit Board, And Engine Cooling Module Including The Motor" in Patent Application Approval Process (USPTO 20180337578)[J]. Electronics Business Journal,2018.[76]. Mazda Motor Corporation; Patent Application Titled "Structure Of Mounting Intake Air Temperature Sensor Of Engine With Supercharger" Published Online (USPTO 20180340496)[J]. Energy Weekly News,2018.[77]. Kia Motors Corporation; "System And Method For Controlling Engine Clutch" in Patent Application Approval Process (USPTO 20180335096)[J]. Energy Weekly News,2018.[78]. Kia Motors Corporation; "Method For Starting Engine For Hybrid Electric Vehicle" in Patent Application Approval Process (USPTO 20180340503)[J]. Energy Weekly News,2018.[79]. Kia Motors Corporation; "Piston For Engine" in Patent Application Approval Process (USPTO 20180340491)[J]. Energy Weekly News,2018.[80]Maniatis P,Wagner U,Koch T. A model-based and experimental approach for the determination of suitable variable valve timings for cold start in partial load operation of a passenger car single-cylinder diesel engine[J]. International Journal of Engine Research,2019,20(1).[81]Tauzia Xavier,Maiboom Alain,Karaky Hassan,Chesse Pascal. Experimental analysis of the influence of coolant and oil temperature on combustion and emissions in an automotive diesel engine[J]. International Journal of Engine Research,2019,20(2).[82]. Kia Motors Corporation; Patent Issued for Engine Idle Operation Control Method And System For Heating Of Hybrid Electric Vehicle (USPTO 10,220,828)[J]. Energy Weekly News,2019.[83]. Suzuki Motor Corporation; Patent Issued for Engine Control Device And Engine Control Method (USPTO 10,232,924)[J]. Computers, Networks & Communications,2019.[84]. Kia Motors Corporation; "Gasoline Direct Injection Engine" in Patent Application Approval Process (USPTO 20190078500)[J]. Energy Weekly News,2019.[85]. Proposed Information Collection Request; Comment Request; Motor Vehicle and Engine Compliance Program Fees (Renewal), EPA ICR 2080.07, OMB Control No. 2060-0545[J]. The Federal Register / FIND,2019,84(070).[86]. Energy; Findings from Federal University of Santa Maria in the Area of Energy Reported (Experimental Investigation of a Variable Compression Ratio System Applied To a Gasoline Passenger Car Engine)[J]. Energy Weekly News,2019.[87]. Energy; Studies from Federal University in the Area of Energy Described (Energy and Emission Impacts of Liquid Fueled Engines Compared To Electric Motors for Small Size Motorcycles Based On the Brazilian Scenario)[J]. Energy Weekly News,2019.[88]. Central Motor Wheel Co. Ltd.; Patent Application Titled "Thermoacoustic Engine, And Designing Method For Thermoacoustic Engine" Published Online (USPTO 20190085833)[J]. Energy Weekly News,2019.[89]. Kia Motors Corporation; Researchers Submit Patent Application, "Apparatus For Improving Efficiency Of Turbocharger Engine", for Approval (USPTO 20190093548)[J]. Energy Weekly News,2019.[90]. Engineering - Automobile Engineering; University of Birmingham Reports Findings in Automobile Engineering (On-board Thermochemical Energy Recovery Technology for Low Carbon Clean Gasoline Direct Injection Engine Powered Vehicles)[J]. Energy Weekly News,2019.汽车发动机英文参考文献四:[91]. Kia Motors Corporation; "Method And Device For Controlling Engine During Idle Purge Of Canister" in Patent Application Approval Process (USPTO 20190112993)[J]. Energy Weekly News,2019.[92]. Hitachi Automotive Systems Ltd.; Patent Issued for Fuel Injection System For Internal Combustion Engine (USPTO 10,267,253)[J]. Energy Weekly News,2019.[93]Song Kang,Upadhyay Devesh,Xie Hui. A physics-based turbocharger model for automotive diesel engine control applications[J]. Proceedings of the Institution of Mechanical Engineers,2019,233(7).[94]. Hitachi Automotive Systems Ltd.; Patent Issued for Engine Control Device (USPTO 10,309,366)[J]. Energy Weekly News,2019.[95]. Continental Automotive GmbH; "Gas Internal Combustion Engine With Auxiliary Starting System" in Patent Application Approval Process (USPTO 20190162123)[J]. Energy Weekly News,2019.[96]. Fuel Research; Studies from Volvo Car Group Add New Findings in the Area of Fuel Research (Impact of Closely-coupled Triple-pilot and Conventional Double-pilot Injection Strategies In a Ld Diesel Engine)[J]. Energy Weekly News,2019.[97]. Kia Motors Corporation; Patent Issued for Engine Start Control Method (USPTO 10,316,814)[J]. Biotech Business Week,2019.[98]. Kia Motors Corporation; "Apparatus And Method For Starting Engine Of Mild Hybrid Electric Vehicle" in Patent Application Approval Process (USPTO 20190184972)[J]. Energy Weekly News,2019.[99]. Energy; Findings from K.N. Toosi University of Technology Provides New Data on Energy (Conceptual design, optimization, and assessment of a hybrid Otto-Stirling engine/cooler for recovering the thermal energy of the exhaust gasses for automotive ...)[J]. Energy Weekly News,2019.[100]. Toyota Jidosha Kabushiki Kaisha; "Automotive Engine Coolant Composition, Automotive Engine Concentrated Coolant Composition, And Method Of Operating Internal Combustion Engine" in Patent Application Approval Process (USPTO 20190194516)[J]. Energy Weekly News,2019.[101]. Kia Motors Corporation; "Engine Control Method For Heating Of Hybrid Electric Vehicle" in Patent Application Approval Process (USPTO 20190193516)[J]. Energy Weekly News,2019.[102]. Kia Motors Corporation; "Vehicle And Method For Controlling Engine Startup Reference Power" in Patent Application Approval Process (USPTO 20190202432)[J]. Energy Weekly News,2019.[103]. Energy; Technical University Details Findings in Energy (A fully automated smooth calibration generation methodology for optimization of latest generation of automotive diesel engines)[J]. Energy Weekly News,2019.[104]. Black &Decker Inc.; "Battery And Motor System For Replacing Internal Combustion Engine" in Patent Application Approval Process (USPTO 20190238083)[J]. Energy Weekly News,2019.[105]. Mazda Motor Corporation; "Exhaust Gas Control Device, Method, And Computer Program Product For An Engine" in Patent Application Approval Process (USPTO 20190234330)[J]. Energy Weekly News,2019.[106]Dongha Kim,JongRoul Woo,Jungwoo Shin,Jongsu Lee,Yongdai Kim. Can search engine data improve accuracy of demand forecasting for new products? Evidence from automotive market[J]. Industrial Management & Data Systems,2019,119(5).[107]R. Ellappan,S. Arumugam. The effect of corrosion inhibitor on corrosion of automotive materials in Biodegradable engine oil[J]. IOP Conference Series: Materials Science and Engineering,2018,390(1).[108]P. Wi?niowski,M ?l?zak,A Niewczas,T Szczepański. Method for synthesizing the laboratory exhaust emission test from car engines based on road tests[J]. IOP Conference Series: Materials Science and Engineering,2018,421(4).[109]J Kaszkowiak,M Markiewicz-Patalon. The impact on the manner of loading theengines powered with biogas and natural gas on the selected parameters of the motor oil[J]. IOP Conference Series: Materials Science and Engineering,2018,421(4).[110]A Wolff. Numerical analysis of gas flow through the labyrinth seal of piston rings of an automotive IC engine[J]. IOP Conference Series: Materials Science and Engineering,2018,421(4).[111]Z Kneba. Research on the phenomena of warming up and free cooling down the car engine[J]. IOP Conference Series: Materials Science and Engineering,2018,421(4).[112]N C Nutu,C Pana,N Negurescu,A Cernat,D Fuiorescu,L Nemoianu. An experimental approach on fuelling a passenger car diesel engine with LPG[J]. IOP Conference Series: Materials Science and Engineering,2018,444(7).[113]T Ulian,V Vornicu,E Rakosi,G Manolache,S Talif,I Agape. The study of the performance improvement possibilities by using the principle of zonal cooling for the automotive engine[J]. IOP Conference Series: Materials Science and Engineering,2018,444(7).[114]V Serevina,A A Azhar,T Sutandi,K Sumeru. Effect Of Engine Speed On The Performance Of Automotive Air Conditioning System Using R134a And R152a As Refrigerants[J]. Journal of Physics: Conference Series,2019,1150(1).[115]Willyanto Anggono,Sutrisno,Fandi D Suprianto,Muji Setiyo,Rendy Wibisono,Gabriel Jeremy Gotama. Experimental investigation of the effect of Nephelium Lappaceum seed biodiesel to the automotive diesel engine performance[J]. IOP Conference Series: Earth and Environmental Science,2019,257(1).[116]Guorui Jia,Huanhuan Ren,Dongchang Zhao,Chuan Chen,Rujie Yu,Peng Ge,Shaohui Liu. Numerical Simulation of Multiple Injections on the Combustion of Reactivity Distribution in Automotive Engine[J]. IOP Conference Series: Earth and Environmental Science,2019,252(3).[117]Xitong Zhang,Tao Peng,Fuxin Mao,Ming Cheng. Research on Key Technologies of Integrated Teaching Platform for Automotive Engine ECU Control System[J]. Journal of Physics: Conference Series,2019,1237(4).[118]Huanhuan Ren,Guorui Jia,Dongchang Zhao,Chuan Chen,Rujiex Yu,Peng Ge,Shaohui Liu. Simulation Study of Injection Strategy on the Emission in Automotive Engine[J]. IOP Conference Series: Earth and Environmental Science,2019,252(3).[119]Olufemi Sylvester Bamisaye,Anthony Yinka Oyerinde,Ubong Akpan Essien. Investigation of the Effects of Air-Conditioning System on the Temperature and Speed of Automobile Engine Using Paired T-Test and Regression Analysis[J]. Open AccessLibrary Journal,2019,06(01).[120]Huali Guo,Jia Cui,Guofu Wang,Hongwang Zhao. Analysis and Research on the Teaching Principle of Automotive Engine Based on CDIO Concept[P]. Proceedings of the 2018 International Conference on Sports, Arts, Education and Management Engineering (SAEME 2018),2018.以上就是关于汽车发动机英文参考文献的分享,希望对你有所帮助。

飞机故障报告常用英语1)两个外流活门在自动时不工作Both outflow valves failed to operate in Auto mode.2)自动时不能增压到所选高度Unable to pressurize to selected altitude in auto.3)后货舱加温测试失效AFT cargo heat failed to test.4)1号空调组件的旁通活门在自动位时与其他组件不一致NO.1 pack bypass valve differs from other packs in Auto mode.5)设备冷却无气流灯亮Equipment cooling no airflow light illuminated.6)1号空气循环机出口温度指示最大NO.1 ACM outlet temperature indicator reads off scale high.7)自动驾驶A在衔接电门不能衔接A/P A engage switch failed to engage.8)自动驾驶A在高度选择截获时不能保持水平飞行A/P A failed to maintain level while flight altitude select captured.9)机长姿态指引仪上出现计算机警告旗Computer warning flag in captain’s ADI.10)自动驾驶仪A的垂直速度方式不能正确控制飞行A/P vertical speed mode failed to control airplane properly with A/P A.111)自动驾驶仪B的红色警告灯常亮A/P B warning light illuminated steady red.12)飞行指引A不能截获NA V模式F/D A failed to capture NA V mode.13)偏航阻尼接通时,方向舵运动过大Rudder movement excessive with yaw dampers on.14)自动油门不能用油门杆电门切断A/T will not disconnect with thrust lever switches.15)自动着陆改平时自动油门不能收回A/T failed to retard during auto land flare16)1号高频不能对所选频率调谐,没有调谐音NO.1 HF radio will not tune to frequency selected . Tune tone failed to sound.17)2号高频无线电收发机在所有状态下都不工作NO.HF radio transceiver inept on all modes.18)C区的旅客广播音量太小PA audio level in zone C is too weak.19)3号发动机CSD出口滑油温度高NO.3 generator CSD out oil temperature high.20)机长座椅不能往后靠Captain’s seat reclines inept.21)B区天花板漏水Water leaking from ceiling in zone B .22)左一门的水灭火瓶需要更换Water fire extinguisher at door 1 left needs replacement.23)右2门的二氧化碳灭火瓶需要更换CO2 fire extinguisher at door 2 right needs replacement.24)1发火警警告。

fdb策略-回复什么是FDB策略?如何制定并实施FDB策略?如何评估FDB策略的有效性?在文章中,我们将一步一步地回答这些问题并逐步探讨FDB策略的重要性和实施过程。
FDB策略,全称为“Fault Detection and Isolation”(故障检测和隔离)策略,是一种用于识别、定位和隔离系统中故障的方法和措施。
在复杂的系统中,故障的出现几乎是不可避免的。
因此,为了保证系统的可靠性和稳定性,必须采取相应的FDB策略来及时发现并处理故障。
首先,制定FDB策略的第一步是明确系统的故障模式和可能的故障类型。
不同的系统具有不同的故障模式和故障类型。
例如,机械系统可能会出现机械部件磨损、断裂或机械结构失效等故障;电子系统可能会出现电路短路、元器件故障或电源波动等故障。
了解系统的故障模式和故障类型是制定FDB策略的基础。
其次,制定FDB策略的第二步是选择合适的故障检测和隔离方法。
常见的故障检测方法包括传感器信号分析、信号处理和故障诊断算法等。
传感器信号分析可以通过监测系统各个部件的传感器信号变化来检测潜在的故障。
信号处理和故障诊断算法可以通过对传感器信号进行数学处理和模式识别来诊断系统中的故障。
隔离方法通常包括基于故障模式和故障类型的逻辑判断、故障树分析和故障模式效应分析等。
选择合适的故障检测和隔离方法是制定有效的FDB策略的关键。
第三步是实施FDB策略。
实施FDB策略涉及到安装故障检测传感器、编写故障检测算法、配置故障隔离逻辑和建立故障库等。
安装故障检测传感器是获取系统状态信息的关键,可以通过传感器监测关键参数来检测潜在故障。
编写故障检测算法可以对传感器数据进行处理和分析,从而实现故障检测。
配置故障隔离逻辑可以根据检测到的故障信息,通过逻辑判断和分析来确定故障的位置和隔离策略。
建立故障库是记录和管理已知故障信息,可以用于故障诊断和隔离。
最后,评估FDB策略的有效性是关键一步。
可以通过系统实际运行中的故障事件和维修记录来评估FDB策略的有效性。


1民航专业英语词汇民航专业英语词汇民航专业英语词汇民航专业英语词汇Main service points:主勤务点Cockpit arrangement: 驾驶舱布局Captain console: 机长操纵台Glare shield panel: 遮光板面板Observer console:观察员操纵台Landing gear free fall lever compartment:起落架自由落下手柄舱Control pedestal forward panel:控制台前面板Control pedestal:控制台Control stand:控制台Cockpit partition:驾驶舱分区Hanger: 机库Protective breathing equipment PBE: 呼吸保护器Crank handle: 摇臂Locking pin: 锁销Seat lateral unlocking: 座位横向锁Seat locking(neutral position): 座位锁Seat longitudinal unlocking:座位纵向锁Inertial real unlocked/locked::::Thigh rest upward/downward setting:Backrest locking:靠背锁Backrest reclining:靠背调节Seat height locking:座位高度锁Seat upward/downward setting:座位上下调整Lumber support pushbutton:Lateral locking pin:横侧锁销Manual control handle:人工操纵手柄Plug:插塞Electric actuator:电动致动器Top- off fitting:Cockpit emergency evacuation:座舱应急逃离Cockpit window emergency exit:座舱窗口应急出口Commonality:通用性Detent protection:致动器保护Cursor control device: CCD 光标控制器光标控制器光标控制器光标控制器White stripped bar:白色斜纹条白色斜纹条白色斜纹条白色斜纹条Reversionary panel:复原面板复原面板复原面板复原面板Display selector knob:显示选择器旋钮Radio altitude data:无线电高度数据FPA acceleration pointer: FPA加速指针Electronic checklist: ECL 电子检查单ECL Database loading page: ECL数据载入页面2Closed loops:闭环Total fuel quantity:De-clutter: 整理Cyan box: 蓝绿色盒子A dual concentric rotary knob:同心双旋钮Electronic bay:电子舱A 20-slot cabinet:插槽柜Glare shield lights control panel:Guidance panel: 制导面板Flood/storm panel lighting: 泛光灯面板照明Chart holder lighting control knob:Flight crew reading lights:机组阅读灯Adjust aperture size of light pattern:调整照明灯孔Passenger sign control panel:Toggle switch:搬扭开关Sterile toggle switch:Rain bow lights :Passenger cabin temperature rotating knob:Courtesy light reset switch:Lavatory dome light:厕所顶灯Water tank capacity and fault indication:水箱容量和故障显示Logotype lights : 航徽灯A colored solid square:有色实心方快Reinforced cockpit door:座舱加强门Electronic mechanic door latch: 机电门闩Waste compartment:废物舱Handset cradle : 通话手机托架Dispensing units : 氧气面罩放出装置Air gasper outlets: 换气口Manual deploy tool:Individual reading light:独立阅读灯Waste flap:Waste disposal:废物箱Chart lights:航图灯Dome lights: 顶灯Fluorescent flood /storm light:萤光泛光灯Cabin /cockpit emergency flood light: 客舱/座舱应急泛光灯Emergency escape path: 应急撤离线路Photoluminscent strip: 荧光发光带Protective grills:Vent flap:Escape slide: 逃生滑梯External handle:Escape slide handle:逃生滑梯手柄3Lock/vent flap handle:Girt bar: 束缚杆束缚杆束缚杆束缚杆Fuel control unit:燃油调节器ramp扶梯Water line:吃水线Access door:检查盖Service door:Lock handle:锁销Proximity sensor: 近地传感器Fabric girt:Floor fittings:Floating device:漂浮设备Mooring line: 系绳系绳系绳系绳Fair safe:Inflation cylinder pressure readiness inspection window:充气瓶压力检查窗Girt bar engagement indicator window:Manual inflation handle:人工充气手柄Pressure gauge:压力表NO.GO indication: 无冲压指示GO indication: 冲压指示Deflated handle:放气手柄Pivot pin:主销Strap handle:Security lever:安全手柄An emergency egress:应急出口A passive lock:Blowout panel:Grill-protected openings: 防火孔/口Peephole:窥视孔Air compressor:空气压缩机Lavatory faucet:厕所水龙头Retention tanks: 贮藏箱Tarmac :停机坪停机坪停机坪停机坪Auto drain valve:自动排放活门Clogs: 塞满Drain mast heater: 排水加热器Vacuum waste system:真空污水系统A flushing switch:冲洗电门Rinse:冲洗Water system controller:净水系统控制器Fill/drain nipple:Sump/sink:收水池,水箱Faucet:水龙头Water filter: 滤水器4Toilet bowl:抽水马桶Overflow tube:外溢排水管Lever sensor:杆式水量传感器Fill/ drain valve:加/放水阀Liquid level sensor: 液位/面传感器Waste line:污水管Rinse line:冲水管Vacuum waste servicing panel:真空污水检查面板Waste drain ball valve handle:污水排泄阀手柄Fire extinguishing system: 灭火系统Automatic configuration monitoring system:自动配置监控系统Non-dispatchableMiscompare:Air management system:空气管理系统Pack flow control valve:主件流量控制活门Cockpit temperature rotating knob: 座舱温度旋钮Recirculation fan:再循环风扇Flight attendant control panel:乘务控制面板Cross-bleed button:交输引气按键Bleed air button: 引气按键Engine bleed valves:发动机引气活门Stripped bar:条纹Cabin altitude selector knob: 座舱高度选择旋钮Pressurization mode selector knob:增压方式选择旋钮Outflow valve:外流活门Landing field elevation:着陆机场标高Differential pressure indication:压差指示ECS synoptic page: ECS 简图页面Air shutoff valves status:空气关断活门状态页面Diagonal:斜的Outflow valve scale /pointer: 排放活门刻度/指针Flow line:排放管Ground cart:地面气源车Gasper:Flow control valve:流量控制阀Low/high stage bleed valve:低压/高压引气活门Engine start ground cart:发动机启动地面气源车发动机启动地面气源车发动机启动地面气源车发动机启动地面气源车Fan air bleed valve:风扇空气引气活门EMERG RAM air valve:应急冲压空气活门Fan air valve:风尚空气活门Low pressure check valve:低压单向活门Anti-ice supply ducting:防冰引气供气管道Overheat detection system:过热探测系统Dual loop sensing:双环探测5Trim pressure duct:压力调节管道FLAPPER VALVES瓣状活门Bleed source:引气源Bleed priority logic: 引气优先逻辑Takeoff data set: TDS 起飞数据设置Cargo bay ventilation:货舱通风ECS cooling packs: ECS 散热主件Pack flow control valve:主件流量控制阀Cabin pull-up mode:座舱拉升方式Electronic compartment ventilation:电子设备舱通风Secondary power distribution assembly:辅助配电组件Emergency integrated control center: 应急集控中心Forced cooling air:强制散热散空气RAM air circuit: RAM 空气电路Emergency ram air ventilation valve:应急冲压空气通风活门Recirculation bay:再循环舱Static pressure port:静压孔Cabin pressure control system:座舱压力控制系统Negative differential pressure:负压差Orifice:孔,口Sensing orifice:探测孔Cabin altitude rate of change: 座舱高度变化率Cabin altitude change rate: 座舱高度变化率Cabin pressure variation rate: 座舱压力变动率Pressure rate of variation:压力变动率Maximum differential pressure limiter: 最大压差限制器Offset of 0.11psi:偏差Bleed isolation valve: 引气隔离活门Lateral guidance control: 水平导航控制Lateral Navigation 侧向导航Vertical guidance control: 垂直导航控制Synchronize:同步HDG selector knob: HDG 选择旋钮Autopilot approach status annunciator: 自动驾驶进近状态信号器Altitude holding mode: 高度保持方式Altitude pre-selected window: 高度预选窗FD guidance cue: 飞行指引仪引导提示符Primary servo:主侍服Thrust control system :TCS 推力系统Thrust reverser trigger: 反推触发器FD declutter button: FD整理键AFCS processing module: 飞控系统处理组件Automatic pitch trim:自动俯仰配平Elevator AP servo:6Aileron AP servo:A hot spare channel: 热备用通道Elevator thrust compensation: 升降舵推力补偿Captain /first office load feel: 机长/副驾驶载荷感应Synchronize the heading bug to the current heading: 航向同步航向同步航向同步航向同步Approach preview mode: 进近预览方式进近预览方式进近预览方式进近预览方式Flight path reference line:飞行航迹基准线Flap-pitch based guidance: 基于襟翼俯仰的引导Overspeed protection: 超速保护Vertical profile:纵向/垂直剖面Waypoint altitude constraint: 航路点高度限制Temperature compensation:温度补偿Descent angle: 下降角Path angle:航迹角Speed/altitude limit protection: 速度/高度限制保护Speed constraint:速度限制Speed reversion: 速度恢复速度恢复速度恢复Latched speed protection: 闩锁速度保护闩锁速度保护闩锁速度保护闩锁速度保护Trim rate command: 配平指令Thrust rating selection: 推力等级选择Thrust lever angle trim:推力手柄角配平Thrust control quadrant:油门操纵杆Speed control mode: 速度控制方式Flight level change thrust control mode: 飞行高度改变的推力控制方式Takeoff thrust control mode:起飞推力控制方式Go-around thrust control mode:复飞推力控制方式Takeoff thrust hold mode:起飞推力保持方式Retard mode: 减速方式Limited thrust: 限制推力Auto rating type transition logic:自动功率型过度逻辑Air cooler inlet:空气三热器进气口APU air inlet silencer: APU进气口消音器APU operational envelope: APU 运行包线图APU selector knob :APU 选择旋钮APU emergency stop button: APU 应急停车键APU RPM indication: APU 转速表APU EGT indication: APU排气温度表APU fuel supply: APU 燃油供应Ejector fuel pump:喷射器燃油泵APU master switch: APU 总电门Electronic starter controller:电子启动器控制器Brushless starter generator:无刷启动发电机Cooldown period: 冷却时间spool 級;短管7spool down 發動機減速spool up 發動機加速Spool down period:发动机减速时间Electrical fault isolation:电气故障隔离Bus tie contactor:母联接触器AC power quality requirement:AC电能质量规定Electrical flow line: 电力线High lift system actuation:大升力系统启动Load shedding:减负荷Electrical-electronic integrated device:电气电子集成设备Thermal circuit breaker:热跳开关Electronic mechanical relays: 电子机械继电器Load distribution:负载分配负载分配负载分配Solid state power controller: 固态电力控制器Line select key:行选择键Priority logic:优先逻辑Load shedding protection:减负荷保护Fan rotor (N1 rotor speed):Compressor (N2 rotor speed)Exciter:激励器Thrust lever detent:Thrust reverser trigger:反推触发器Fire handle:灭火手柄Fire protection control panel:防火保护控制面板Engine control panel:发动机控制面板Start/stop selector knob:启动/关断选择旋钮Ignition selector knob:点火选择旋钮N1 wing anti-ice cyan line:Thrust level:推力级Thrust rating mode indication:推力等级方式显示N1 request indication:Auto re-light system: 自动重起系统Vibration level:变动级Fuel /oil heat exchanger:燃油/滑油热交换器Fuel-cooled oil cooler:燃油致冷式滑油散热器Fuel metering valve:燃油计量活门Fuel filter blockage:燃油滤堵塞Variable stator vanes:可变静子叶扇Fuel driven actuator:燃油驱动致动器Compressor efficiency:压缩机效率Fuel injector:燃油喷嘴Ejector fuel pump:喷射器燃油泵Lubrication system:Shaft bearings:8Accessory gearbox:附件齿轮箱Oil quantity sensors:滑油量传感器Scavenge pumping elements:回油泵元件Lube and scavenge pump:Chevron nozzle:Sump drain: 收油池Puddle:坑A filter bypass:Cold start relief valve:冷启动释放活门Deaerator:CHIP detector: 金属探测器Scavenge screens:回油筛Transfer gear box:转换齿轮箱Starter cutout speed:启动机关断速度Ignition selector knob:点火选择旋钮Engine start selector knob:发动机启动选择旋钮Ground idle speed:地面慢车速度Thrust reverser stowing:Interlock function:互锁功能Actuator locks:启动器锁Cowl lock:Engine condition monitoring:发动机状态监控Engine inlet air temperature:发动机进气温度Fan speed data:风扇速度数据Airplane vibration monitoring system:飞机抖动监控系统Automatic dry monitoring:自动干转监控Performance calculation:Flexible takeoff:灵活起飞A reduced takeoff thrust:减功率起飞推力Assumed temperature:假定温度Minimum flex takeoff thrust:最小灵活起飞推力Maximum rated takeoff thrust:最大额定起飞推力Flex takeoff reduction limit:灵活起飞推力减少限制N1 request valve:Takeoff reserve:起飞保留Default mode setting:默认方式设置Flat rated temperature:Hot start :热启动No light off:无点火Hung start:延迟启动ITT OVER limit protection: ITT 超温限制保护Engine start high ITT prevention:发动机启动ITT温度过高预防Engine fire extinguisher handle:发动机灭火器手柄APU fire extinguisher button:9Hydraulic shutoff valve:液压关短活门High and low –rate cargo extinguisher bottle: 货舱大/小功率灭火瓶Fire detection system test button:火警探测系统测试键Engine fire protection system:发动机防火系统Fire extinguisher handle:灭火手柄Fuselage fairing:机身整流罩Engine bleed air shutoff valve:发动机引气关断活门Pneumatic fire detector:气源火警探测器Cargo smoke detection:货舱烟雾探测器Ventilation outflow valve:通风排放活门Smoke sensor:烟雾传感器Flight control system:飞控系统Multifunction roll spoiler:多功能横滚扰流板Ground spoiler:地面扰流板Hydraulic actuator:液压制动器Control cables:操纵纲索Primary actuator control electronics:主控电子装置Flight control module:飞控组件Electro-hydraulic actuators:电子液压启动器Electro-mechanical actuators:Pitch trim switch:俯仰配平电门AP/Trim disconnect button:Slat/flap selector lever:Speed brake lever:减速板手柄Pitch trim system 1 cutout button:Flight control mode panel:飞控方式面板Flight control mode button:Elevator disconnect handle:升降舵断开手柄Aileron disconnect handle:A solid green pointer:Analog control:模拟操纵Rudder /elevator surface actuator:方向舵/升降舵舵面驱动器Controller area network bus:Stroke limiting:High level function:高级功能Avionics standard communication bus: ASCB航空电子标准通讯汇流条System diagnostics:系统诊断Central maintenance computer 中央维护计算机CMCElevator thrust compensation:升降舵推理补偿Brake control module:刹车控制组件Proximity sensor electronic module:近地传感器电子组件Airspeed augmentation commands:空速增益指令Latent faults:潜在故障Cells:电池10Reference thrust setting:基准推力值Control column displacement:驾驶杆移位Disconnect mechanism:分离机械Disconnect handle:分离手柄Tail strike avoidance: TSA 尾撬尾撬尾撬尾撬AOA limiter:迎角限制器AOA threshold: AOA 标准标准标准标准Pitch rate:俯仰变化率Wheel main trim switches: 手轮主配平电门Electrical servo motor: 电器侍服马达Horizontal stabilizer actuator:水平安定面致动器Speedbrake auto trim:减速板自动配平Electric trim motor:电动配平马达Automatic mach trim:自动马赫配平Pitch down tendency:机头下沉趋势FWD/AFT torque tubes:Gain scheduling:增益计划增益计划增益计划增益计划Rudder gain:方向舵增益Rudder effectiveness:方向舵效率Interconnect rod:内接连杆Pedal assembly:脚蹬组件Yaw dumping:偏航阻尼偏航阻尼偏航阻尼偏航阻尼Slat system:Slat surface:缝翼翼面Double slotted flap surfaces:双槽襟翼操纵面Power driven unit:PDU 动力驱动组件Skew protection:不对称保护不对称保护不对称保护不对称保护Electronic skew sensor:电子不对称传感器Strike protection:电气过载保护电气过载保护电气过载保护电气过载保护Displacement angle:偏转角度Control wheel displacement:驾驶杆偏移Wheel brake efficiency:机轮刹车效率Stopping distance:停止距离Fixed control laws configuration:Steep approach mode: 大角度进近方式大角度进近方式大角度进近方式大角度进近方式Flap low rate:Pitch trim low rate:Slat low rate:Gliding line:下滑线Aiming point下滑点Climb angle:上升角Descend angle:下降角ALPHA门警告UNSTABLE MODE:CONFIGURATION 不稳定模式:构型不当11 UNSTABLE MODE::::STEEP 不稳定模式不稳定模式不稳定模式不稳定模式::::下降剖面陡下降剖面陡下降剖面陡下降剖面陡EXCESSIVE BANK ANGLE 坡度大EXCEEDENCE OF FLAP ALTITUDE LIMIT襟翼超高度限制EXCEEDENCE SPEED速度超限HIGH NEGATIVE ACCELEARTION (IN FLIGHT)飞行中垂直过载小HIGH POSITIVE ACCELERATION(IN FLIGHT)飞行中垂直过载大DIRECT LAW :Direct law 警告ALTITUDE ALERT:DESCENT高度警告:下降ABNORMAL CONFIGURATION(AT GO—AROUND):复飞构型错BOUNCED LANDING::::着陆跳起着陆跳起着陆跳起着陆跳起LONG FLARE::::着陆有平飘着陆有平飘着陆有平飘着陆有平飘HIGH ACCELERATION (AT LANDING):接地垂直过载大HEADING DEVIATION (AT LANDING):着陆航向不稳定(接地—地速50KTS)PITCH LOW (AT TOUCHDOWN)接地时刻俯仰角小TIRE LIMIT SPEED HIGH轮胎限制速度大LOW SPEED AT LANDING接地速度小HIGH SPEED AT LANDING接地速度大LANDING GEAR OUT OF SEQUENCE起落架放出顺序错USE OF SPEEDBRAKES DURING FINAL APPROAC最终进近使用扰流板LATE LANDING FLAP SETTING着陆构型设置过晚着陆构型设置过晚着陆构型设置过晚着陆构型设置过晚Exceddence of flaps/slats limit speed in conf full ::CONF FULL 构型时襟构型时襟构型时襟构型时襟/缝翼限制速度超缝翼限制速度超缝翼限制速度超缝翼限制速度超限限限限roll cycling during final approach::::最终进近横向姿态变化大最终进近横向姿态变化大最终进近横向姿态变化大最终进近横向姿态变化大pitch cycling during final approach最终进近俯仰姿态变化大最终进近俯仰姿态变化大最终进近俯仰姿态变化大最终进近俯仰姿态变化大Pitch Low In Final approach::::最终进近俯仰角小最终进近俯仰角小最终进近俯仰角小最终进近俯仰角小localizer deviation::::航向道偏差大航向道偏差大航向道偏差大航向道偏差大Glide slope deviation低于下滑道低于下滑道低于下滑道低于下滑道High rate of descent进近下降率大进近下降率大进近下降率大进近下降率大Late thrust reduction收油门过晚收油门过晚收油门过晚收油门过晚Approach speed low进近速度小Approach speed high进近速度大进近速度大进近速度大进近速度大Descent Slope: shallow下降坡度下降坡度下降坡度下降坡度:::小小小、、、、Descent Slope: STEEP下降坡度下降坡度下降坡度下降坡度::::大大大大Maximum Operating Altitude exceedence:高度超限Early configuration change (during initial climb) 初始爬升构型改变过早初始爬升构型改变过早初始爬升构型改变过早初始爬升构型改变过早Height lost高度损失(初始爬升pitch rate high(during initial climb, 初始爬升俯仰率大climb out speed low爬升速度小High positive Acceleration::::起飞阶段垂直过载大起飞阶段垂直过载大起飞阶段垂直过载大起飞阶段垂直过载大lift off speed high离地速度大离地速度大离地速度大离地速度大N1 uncoordination 起飞时左右发起飞时左右发起飞时左右发起飞时左右发N1不匹配不匹配不匹配不匹配taxi speed exceedence滑行速度大地貌飛行地貌飛行地貌飛行地貌飛行((((Contour FlyingContour FlyingContour FlyingContour Flying))))障礙物超越障礙物超越障礙物超越障礙物超越((((Obstruction ClearanceObstruction ClearanceObstruction Clearance Obstruction Clearance))))12SSSSteep turnteep turnteep turnteep turn::::小转弯小转弯小转弯小转弯空中動作(In-flight maneuver)特定飛航動作(*Specific flight characteristics)接近失速及改正(Approaches to stall and recovery)*環繞進場(Circling approach)誤失進場(Missed approach)Navigation radio sensor: 导航无线电传感器Airspeed tape indications:空速速度带显示Selected airspeed /mach readout:Selected airspeed bug: 选择空速游标Vfs speed: takeoff final segment speed:Flap retraction speed reference:襟翼收上速度基准Airspeed trend vector: 空速趋势矢量Approach climb speed:进近爬升速度Reference speed:基准速度Ideal flap selection speed:最佳襟翼收上速度Drift down speed:飘降速度Flap maneuvering speed:襟翼机动速度Shaker speed:抖杆速度Low speed awareness tape:低速意识带Airspeed rolling digits:空速滚动数字Vmo/Mmo Barber Pole: 标杆速度Selected vertical speed direction arrow:选定升降速度方向箭头Selected vertical speed readout:选定升降速度值Vertical speed scale:Altitude tape indication:高度带显示Single or double line chevrons: 单或双线V形标记Green hashed box:Barometric correction:气压修正Altitude trend vector:高度趋势矢量ADI indication: ADI 显示Flight path reference line /readout: 飞行航迹基准线/读数FPA acceleration pointer: FPA加速指针Pitch limit indicator:俯仰姿态限制指示器Stick shaker AOA: 失速抖杆AOAActual AOA: 实际AOASlip/skid indicator: 滑动指示器Roll scale /low bank limit ARC: 横滚刻度/小坡度限制弧Inverted triangle:Steep turns:小转弯ILS glide slop deviation: ILS 下滑道偏离Vertical approach path: 垂直进航迹FMS vertical deviation: FMS垂直偏离13Trapezoidal form:不规则四边形ILS/VOR lateral deviation: ILS/VOR侧向偏离Pitch angle scale:俯仰角刻度Takeoff crossbar:起飞十子杆Excessive pitch chevron annunciator:俯仰过大V形信号牌Radar altitude indication:雷达高度指示Minimum selected readout:最小选择读数Marker beacon annunciation:指点标信号Graphics test data monitor annunciator: 图形测试数据监控器信号牌Attitude source annunciation:姿态源信号Air data source annunciation:大气数据源信号VNAVA altitude constraint annunciation: VNAVA高度限制信号Vertical track alert annunciation:垂直航迹预警信号Primary navigation source annunciation:主导航源信号Selected heading readout: 选定航向读数Bearing pointer:方位指针Course select point:航道选择点Lateral deviation indicator: 侧向偏离显示器Drift angle bug:偏流角游标Dilution of Precision精度扩散因子精度扩散因子精度扩散因子精度扩散因子Bearing source annunciator:方位源信号牌Selected heading bug:选定航向游标Course select preview pointer:航道选择预览指针Desired track readout:目标航迹读数Dead reckoning mode:推测领航方式Approach sensitivity mode annunciator: 进近敏感性方式信号牌Waypoint data block indications:航路点数据块显示Range selection:距离选择Weather radar returns: 气象雷达回波Antenna position indicator:天线位置指示器Slave annunciation:随动显示随动显示随动显示随动显示ADI/HIS miscompare: 不匹配Horizontal profile indications:水平剖面指示Vertical profile indications:垂直剖面指示Horizontal track line:水平航迹线FMS progress window: FMS 进程窗Selected heading out of view arrow:选定航向隐藏箭头Cross track annunciations:十子航迹信号Planned horizontal flight path:计划水平航路Airplane trajectory line:飞机空气轨迹线Vertical situation display:垂直状态显示Target alert checkbox:目标预警复选框/检查盒Rain echo attenuation compensation technique checkbox:雨反射波衰减补偿技术复14选框/检查盒Altitude compensation tilt check box:高度补偿倾斜复选框/检查盒Turbulence detection checkbox:颠簸探测复选框/检查盒Gain indication display:增益指示显示Receiver sensitivity level:接收机灵敏度Antenna stabilization checkbox:天线稳定复选框/检查盒Sector scan checkbox:扇形扫描复选框/检查盒Forced standby override:强制等待超控键Lightning sensors:雷电传感器Rate of occurrence symbols: 发生率符号Lightning mode:雷电方式Lightning clear function:雷电删除功能Scratch pad:草稿Index display:索引显示Brightness control button:灯光亮度控制键Function buttons:功能键Data link:数据链Thrust rating selection:推力功率选择Display control panel:显示控制面板Full compass:全罗盘ARC mode: ARC 方式Flight path reference:飞行航迹基准Integrated electronic standby system IESS 集成电子备用系统Reference barometric pressure indication:基准气压压力指示Meter altitude indication:米制高度指示Negative altitude:负高度Baro rotary knob:气压设置旋钮Detent :卡位Control wheel chronometer:驾驶盘时钟Standby magnetic compass:备用磁罗盘Glareshield communication:遮光板通讯Hand microphone controls:手持麦克风Headphone::::头戴式耳机头戴式耳机头戴式耳机头戴式耳机Headset头戴式耳机Boom microphone::::Ramp station:SELCAL annunciation button: 选择呼叫信号键Digital voice data recorder: DVDRReversionary panel:复原面板Reversionary logic cycle:复原逻辑循环Multifunction probe:多功能探测管Side-slip effects:侧滑效应Total pressure: 全压Static pressure:静压15Resistive heater element:防热散失加温元件Airplane sink rate variation:飞机下沉率变动Record mandatory parameters:强制记录参数Barometric corrected altitude:气压修正高度Alignment phase: 校准阶段Lateral acceleration:侧向加速Compass card:罗盘卡Lubber line: 罗盘准线Bowl:盘/碟/碗Modular radio cabinet:模块式无线电机柜Squelch type:静噪类型Signal-noise squelch: 信噪静噪信噪静噪信噪静噪信噪静噪Signal /noise squelch high:Signal level squelch :信号电平静噪EM mode: emission mode: 发射方式Carrier power:载波功率Power dispersion: 功率耗散Clarifier:无线电干扰消除器Capture a frequency: 频率截/捕获Communication management function”通讯管理功能Character –oriented communication: 面向字符通讯Voice communication: 语音通讯Airline operational communication:航空公司运营通讯Fault /events reports: 故障/事件报告Uplink:上传Inertial reference unit:惯性基准单元/组件Acquisition:截获Altitude aiding:高度帮助Velocity aiding:速度帮助Prompt:提示符提示符提示符提示符Designated airspace: 指定空域Transponder field:Ground mapping:地面测绘Integrated receiver transmitter antenna unit:集成收发机天线组件集成收发机天线组件集成收发机天线组件集成收发机天线组件Radar weather detection mode:雷达天气探测方式Ground mapping mode:地面测绘方式Slave mode:从模式/方式/用户方式Off MODE:Standby /forced standby mode:备用/强制备用方式Angle of sweep: 扫描范围/角Tilt function:倾斜功能Altitude compensation tilts function:高度补偿倾斜功能Attenuation losses: 衰减损失16Transmit inhibit relay:发射抑制继电器Navigation MAP data: 导航MAP 数据Performance initialization data:性能初始化数据Vertical track alert:垂直航迹预警Initial cruise altitude:初始巡航高度Early/late descent:下降早/迟FMS speed plan:FMS速度计划Speed command flight phase:速度指令飞行阶段Approach speed limit activation logic:进近速度限制激活逻辑Waypoint speed constraints:航路点速度限制Navigation database: 导航数据库Customs database:用户数据库Aircraft database:飞机数据库Performance learning function: “smart performance”Company route identifier:公司航路代号FMS position integrity estimate:FMS 位置整体估计Lateral track alert:侧向航迹预警A steep climb:大角度上升Lateral offset:横横横横/侧向偏至角侧向偏至角侧向偏至角侧向偏至角Maintenance and system configuration:维修和系统构型Navigation identification:导航识别Position initialization:位置初始化Performance initialization: 性能初始化Route selection:航路选择Creating a flight route: 创建飞行航路Alternate flight route:备用飞行航路Tail marker:机位标记Point of No turn: 航线临界点航线临界点航线临界点航线临界点Maximum endurance:最大续航能力Maximum range:最大航程Speed schedule:速度计划Step climb increment:分段爬升增量Step size 分段爬升高度间隔差T/C:top of climb目標爬升最高點S/C:step of climb 階段爬升起點符號E/D: end of descent目標下降終止點T/D:top of descent目標下降點Fuel allowance :可用燃油Contingency fuel:意外情况备份燃油Average cruise wind:平均巡航风Temperature deviation:温度差异Ceiling altitude :升限Latest estimated fuel remaining:最新估计余油Excitation:励磁17Exciter:励磁器Redundancy:冗余/备份Fan Cowl:Feeder route:支线Feeder line:支线航线Feeder fix:支线定位点Final approach course:最后进近航段Full flight simulator:全飞模拟机Fixed base simulation:固定模拟机Flap speed schedule:襟翼速度计划Flight controls:飞行操纵面Float switch:浮子开关Fuel conservation: 节油Throttle Position Idle ::::節流閥位於怠速節流閥位於怠速節流閥位於怠速節流閥位於怠速BUS TIE(埠栓埠栓埠栓埠栓PACK(S)(空調套件空調套件空調套件空調套件GASPER和和和和HUMIDIFIER(增濕器增濕器增濕器增濕器)HI FLOW(高流量開關高流量開關高流量開關高流量開關INERTIAL REFERENCE SYSTEM慣性參考系統慣性參考系統慣性參考系統慣性參考系統Gasper air:Gasper air outlet:Floor bracket:Hub cap:毂盖Ignition exciter: 点火励磁器Inlet guide vanes:进气引导叶扇/片/导向叶片International air route:国际航线Interlock:联锁Jet pump: 喷射泵/引射泵Joggle:折接Jumper wire 跨接线跨接线跨接线跨接线Electric actuator: 电力致动器Limit switch:极限电门Spot light:聚光灯Flood light:泛光灯Default:A confirm entry prompt: 输入提示符Figure of merit:指标值Steep climb /descent:大角度上升/下降Louver:百叶窗Flyover waypoint:飞跃航路点Outbound time/distance: 出航时间/距离18Procedure turn angle:程序转弯角Crossing point:穿越点Point of NO turn:航线临界点航线临界点航线临界点航线临界点Magenta: 洋红色Equal time point:Latitude /longitude crossing:横向/纵向穿越Point abeam:点切Slave cable:随动钢索随动钢索随动钢索随动钢索Flight idle:空中慢车/高慢Ground idle:地面慢车/地慢Turbine blade and vane cooling: 涡轮转子和静子叶片散热涡轮转子和静子叶片散热涡轮转子和静子叶片散热涡轮转子和静子叶片散热Turbine case cooling:涡轮机匣散热Turbine compartment cooling valve:涡轮段散热活门涡轮段散热活门涡轮段散热活门涡轮段散热活门Transfer gearbox: 传动齿轮箱Thrust lever travel: 油门杆行程油门杆行程油门杆行程油门杆行程Thrust lever angle:推力手柄角Threshold overhaul: 大修时间大修时间大修时间大修时间Thrust lever resolver angle: 推力手柄解算器角度Thrust reverser directional valve: 反推换向活门反推换向活门反推换向活门反推换向活门Thermal couple:热电耦Underwater locator beacon: 水下定位信标Above ground level:地标位置地标位置地标位置地标位置Pictorial deviation indicator: 偏航图显示器Thrust rating panel: 推力等级面板Integral wing tanks:Windmill:风转Fuel flow line:燃油供油管Refueling /defueling control panel: 加油/放油控制面板Collector tank:收油槽/收油油箱Surge tank: 通气防波油箱/缓冲油箱Hard breaking:Magnetic level indicator/dipstick: 磁性燃油尺Ejector fuel pump/jet pump:引射泵引射泵引射泵引射泵Scavenge ejector pumps: 回油引射泵回油引射泵回油引射泵回油引射泵Engine motive flow :发动机引射流发动机引射流发动机引射流发动机引射流Engine motive line:发动机引射管发动机引射管发动机引射管发动机引射管Ejector inlet port: 引射泵进口Fuel Collector Box:燃油集油箱Refueling point:加油点Fuel conditioning unit:燃油加温调节器燃油加温调节器燃油加温调节器燃油加温调节器Gravity refuel port:重力加油口Fluid communication point:Electric hydraulic pump:电动Engine driven hydraulic pump:液压泵19Power transfer unit:动力转换器Hydraulic flow line: 液压管Hydraulic system distribution box: 液压系统分配箱Flight-critical function:飞行临界功能飞行临界功能飞行临界功能飞行临界功能Windmill restart: 风转启动Torque load:扭力载荷Temperature transducer: 温度传感器Pump cavitations: 泵空隙现象Mechanical piston:机械泵Hydraulic motor: 液压马达Pump unloader valve:液压泵卸栽活门Flow limiter valve:流量限制活门Bleed air manifold pressure: 引气总管压力Bleed air temperature:引气温度Anti-ice flow line:防冰管防冰管防冰管防冰管Anti-fogging: 防雾SAI IBIT:缝翼防冰空中自箭缝翼防冰空中自箭缝翼防冰空中自箭缝翼防冰空中自箭Dual wheel unit:双轮组件A powered steering system:Downlock release button:电动转弯操纵系统Landing gear lever lock:起落架手柄锁Alternate gear extension compartment:备用起落架释放舱Electrical overridden switch:起落架超控电门Landing gear warning inhibition button:起落架警告抑制键Emergency parking brake handle:应急停留刹车手柄Brake line:刹车管Emergency/parking brake effectiveness: 应急/停留刹车效应Emergency/parking accumulator pressure:应急/停留刹车蓄压器压力Steering handle:转弯手柄Hand wheel:手轮Steering disengage switch:转弯操纵脱离电门Nose wheel steering system:前轮转弯操纵系统Towing lights:牵引灯Proximity sensor electronic module: 近地传感器电子组件Landing gear free fall lever compartment:起落架自由下落手柄舱Downlock sensor:下位锁传感器Mechanical lock:机械锁Shock absorber:减震器Downlock springs:下位锁弹簧Brake wear pin:刹车装置磨损检查销刹车装置磨损检查销刹车装置磨损检查销刹车装置磨损检查销Locked wheel protection: 拖胎保护拖胎保护拖胎保护拖胎保护Differential braking: 差动刹车Locked wheel braking: 拖胎刹车拖胎刹车拖胎刹车拖胎刹车Wheels spinning:机轮旋转20Fusible plugs:易熔塞易熔塞易熔塞易熔塞Brake bracket outer face assembly:刹车支架外表组件Nosewheel steering control module:前轮转弯控制组件Hardover test:Handwheel steering mode:手轮转弯方式Rudder pedal steering mode:方向舵脚瞪转弯方式Free wheel steering mode:自由机轮转弯方式Rechargeable cylinder:可充液压缸Chemical oxygen generator:化学制氧器Portable oxygen cylinder:手提式氧气瓶Protective breathing equipment:呼吸保护器呼吸保护器呼吸保护器呼吸保护器Mask deploy selector knob:面罩打开选择器旋钮Mask deployed indicator light: 面罩打开指示灯Bright yellow star:明亮黄色星星Harness inflation control valve:面罩带充氧控制活门Mask stowage box:面罩储存盒Automatic oxygen dilution:氧气自动稀释氧气自动稀释氧气自动稀释氧气自动稀释Membrane:膜A transparent oxygen hose:透明氧气软管Dispensing unit:分配组件。


电力系统继电保护中英文对照表中文词汇英文词汇电力系统Power system继电保护Relay protection保护装置Protective device故障Fault故障电流Fault current故障检测Fault detection故障分类Fault classification故障定位Fault location故障记录器Fault recorder过电压保护Overvoltage protection过电流保护Overcurrent protection地电流保护Earth current protection短路Short circuit短路电流Short circuit current瞬时值Instantaneous value时限值Time limit value跳闸Tripping启动电流Starting current感应式电流互感器Inductive current transformer 压板式电流互感器Plate-type current transformer 合闸Closing开关刀闸Switch disconnector接地刀闸Ground disconnector电流互感器Current transformer功率互感器Power transformer电压互感器Voltage transformer电流差动保护Current differential protection 电压差动保护Voltage differential protection 闭锁Blocking重保Backup protection保护跳闸Protection tripping故障保护Fault protection过零保护Zero-crossing protection过频保护Over-frequency protection沉侵保护Inrush protection远方保护Remote protection就地保护Local protection瞬变保护Transient protection空气开关Air switch隔离开关Isolation switch封闭开关Enclosed switch电力系统自动化Power system automation 故障指示灯Fault indicator电源Power supply接线Wiring电流Current电压Voltage功率Power频率Frequency相位Phase直流Direct current交流Alternating current以上是电力系统继电保护中英文对照表,希望对您有所帮助。
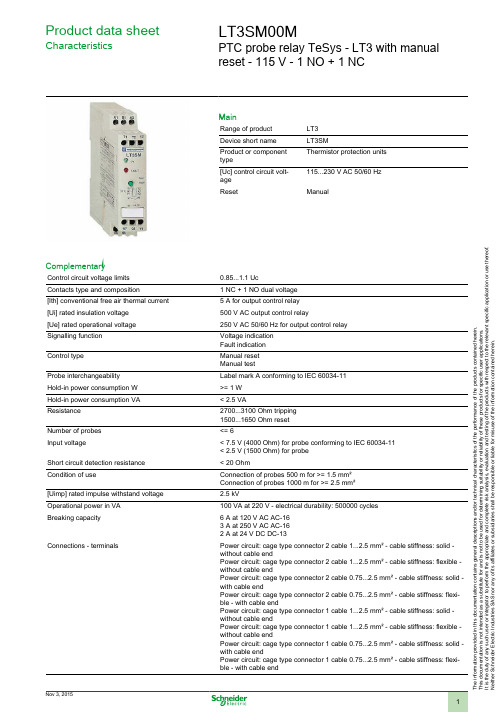
T h e i n f o r m a t i o n p r o v i d e d i n t h i s d o c u m e n t a t i o n c o n t a i n s g e n e r a l d e s c r i p t i o n s a n d /o r t e c h n i c a l c h a r a c t e r i s t i c s o f t h e p e r f o r m a n c e o f t h e p r o d u c t s c o n t a i n e d h e r e i n .T h i s d o c u m e n t a t i o n i s n o t i n t e n d e d a s a s u b s t i t u t e f o r a n d i s n o t t o b e u s e d f o r d e t e r m i n i n g s u i t a b i l i t y o r r e l i a b i l i t y o f t h e s e p r o d u c t s f o r s p e c i f i c u s e r a p p l i c a t i o n s .I t i s t h e d u t y o f a n y s u c h u s e r o r i n t e g r a t o r t o p e r f o r m t h e a p p r o p r i a t e a n d c o m p l e t e r i s k a n a l y s i s , e v a l u a t i o n a n d t e s t i n g o f t h e p r o d u c t s w i t h r e s p e c t t o t h e r e l e v a n t s p e c i f i c a p p l i c a t i o n o r u s e t h e r e o f .N e i t h e r S c h n e i d e r E l e c t r i c I n d u s t r i e s S A S n o r a n y o f i t s a f f i l i a t e s o r s u b s i d i a r i e s s h a l l b e r e s p o n s i b l e o r l i a b l e f o r m i s u s e o f t h e i n f o r m a t i o n c o n t a i n e d h e r e i n .Product data sheetCharacteristicsLT3SM00MPTC probe relay TeSys - LT3 with manualreset - 115 V - 1 NO + 1 NCMainRange of product LT3Device short name LT3SMProduct or component typeThermistor protection units [Uc] control circuit volt-age 115...230 V AC 50/60 Hz ResetManualComplementaryControl circuit voltage limits 0.85...1.1 UcContacts type and composition1 NC + 1 NO dual voltage [Ith] conventional free air thermal current 5 A for output control relay [Ui] rated insulation voltage 500 V AC output control relay[Ue] rated operational voltage 250 V AC 50/60 Hz for output control relay Signalling function Voltage indication Fault indication Control typeManual reset Manual testProbe interchangeability Label mark A conforming to IEC 60034-11Hold-in power consumption W >= 1 W Hold-in power consumption VA < 2.5 VAResistance 2700...3100 Ohm tripping 1500...1650 Ohm reset Number of probes <= 6Input voltage< 7.5 V (4000 Ohm) for probe conforming to IEC 60034-11< 2.5 V (1500 Ohm) for probe Short circuit detection resistance < 20 OhmCondition of useConnection of probes 500 m for >= 1.5 mm²Connection of probes 1000 m for >= 2.5 mm²[Uimp] rated impulse withstand voltage 2.5 kVOperational power in VA 100 VA at 220 V - electrical durability: 500000 cycles Breaking capacity6 A at 120 V AC AC-163 A at 250 V AC AC-162 A at 24 V DC DC-13Connections - terminalsPower circuit: cage type connector 2 cable 1...2.5 mm² - cable stiffness: solid -without cable endPower circuit: cage type connector 2 cable 1...2.5 mm² - cable stiffness: flexible -without cable endPower circuit: cage type connector 2 cable 0.75...2.5 mm² - cable stiffness: solid -with cable endPower circuit: cage type connector 2 cable 0.75...2.5 mm² - cable stiffness: flexi-ble - with cable endPower circuit: cage type connector 1 cable 1...2.5 mm² - cable stiffness: solid -without cable endPower circuit: cage type connector 1 cable 1...2.5 mm² - cable stiffness: flexible -without cable endPower circuit: cage type connector 1 cable 0.75...2.5 mm² - cable stiffness: solid -with cable endPower circuit: cage type connector 1 cable 0.75...2.5 mm² - cable stiffness: flexi-ble - with cable endTightening torque0.8 N.mHeight100 mmWidth22.5 mmDepth100 mmProduct weight0.22 kgEnvironmentStandards IEC 60034-11VDE 0660Product certifications LROS (Lloyds register of shipping)IP degree of protection IP20 conforming to VDE 0106IP20 conforming to IEC 60529Ambient air temperature for operation-25...60 °CAmbient air temperature for storage-40...85 °C conforming to IEC 60068-2-2-40...85 °C conforming to IEC 60068-2-1Operating altitude> 1500...3000 m with derating in temperature<= 1500 m without derating in temperatureVibration resistance 2.5 gn 2...25 Hz conforming to IEC 60068-2-61 gn 25...150 Hz conforming to IEC 60068-2-6Shock resistance 5 gn 11 ms conforming to IEC 60068-2-27Electromagnetic compatibility Susceptibility to electromagnetic fields - test level level 3 conforming to IEC61000-4-3Surge resistance 1.2/50-8/20 - test level level 4 conforming to IEC 61000-4-5Resistance to fast transient - test level level 3 conforming to IEC 61000-4-4Resistance to electrostatic discharge - test level level 3 conforming to IEC61000-4-2Immunity to microbreaks and voltage drops conforming to IEC 61000-4-11 Contractual warrantyPeriod18 months。

发电机主保护动作流程英文回答:Generator main protection is crucial for the safe and reliable operation of power plants. It is responsible for detecting and isolating faults in the generator and its associated equipment. The main protection scheme typically includes various relays and devices that monitor different parameters and respond accordingly to protect the generator.The action sequence of generator main protection can vary depending on the specific design and settings of the protection system. However, I will provide a general overview of the typical steps involved in the protection action.1. Fault Detection: The protection system continuously monitors various parameters, such as voltage, current, frequency, and temperature, to detect any abnormalconditions or faults. When a fault occurs, the protectionrelays sense the deviation from normal operating conditions and initiate the protection action.2. Fault Isolation: Once a fault is detected, the protection system needs to isolate the faulty section from the rest of the system to prevent further damage. This is achieved by tripping the circuit breakers associated with the faulty section, disconnecting it from the rest of the system.3. Alarm and Annunciation: Simultaneously with fault detection and isolation, the protection system generates alarms and annunciations to notify the operators and relevant personnel about the fault. These alarms can be in the form of audible or visual signals, indicating the nature and location of the fault.4. Fault Clearing: After isolating the fault, the protection system initiates the clearing of the faulted section. This can involve actions such as automatic re-closing of circuit breakers, initiating backup protection schemes, or manual intervention by the operators.5. Post-Fault Analysis: Once the fault is cleared, the protection system analyzes the fault data to determine the cause and extent of the fault. This analysis helps in identifying any underlying issues or weaknesses in the system and allows for corrective actions to be taken to prevent future faults.It is important to note that the specific actions and sequence may vary depending on the protection scheme and the type of fault. For example, in the case of a generator stator fault, the protection system may trip the generator breaker, initiate backup protection for the generator, and generate an alarm for the operators to investigate the fault.中文回答:发电机主保护对于电厂的安全和可靠运行至关重要。

Typical Fault Protected IGBT Gate Drive CircuitThe HCPL-316J is an easy-to-use,intelligent gate driver whichmakes IGBT V CE fault protection compact, affordable, and easy-to-implement. Features such as userFigure 1. Typical Desaturation Protected Gate Drive Circuit, Non-Inverting.configurable inputs, integrated V CE detection, under voltage lockout (UVLO), “soft” IGBT turn-off and isolated fault feed-back provide maximum design flexibility and circuit protection.Description of Operation during Fault Condition1. DESAT terminal monitors the IGBT V CE voltage through D DESAT .2. When the voltage on the DESAT terminal exceeds7volts, the IGBT gate voltage (V OUT ) is slowly lowered.3. FAULT output goes low,notifying the microcontroller of the fault condition.4. Microcontroller takes appropriate action.Output ControlThe outputs (V OUT and FAULT)of the HCPL-316J are controlled by the combination of V IN , UVLO and a detected IGBT Desat condition. As indicated in the below table, the HCPL-316J canbe configured as inverting or non-inverting using the V IN+ or V IN- inputs respectively. When an inverting configuration is desired,V IN+ must be held high and V IN-toggled. When a non-inverting configuration is desired, V IN-must be held low and V IN+toggled. Once UVLO is not active (V CC2 - V E > V UVLO ), V OUT is allowed to go high, and theDESAT (pin 14) detection feature of the HCPL-316J will be theprimary source of IGBT protection.UVLO is needed to ensure DESAT is functional. Once V UVLO+ > 11.6V, DESAT will remain functional until V UVLO- < 12.4 V. Thus, the DESAT detection and UVLOfeatures of the HCPL-316J work in conjunction to ensure constant IGBT protection.Product Overview DescriptionThe HCPL-316J is a highly integrated power control device that incorporates all the necessary components for a complete, isolated IGBT gate drive circuit with fault protection and feedback into one SO-16 package. TTL input logic levels allow direct interface with a microcontroller, and an optically isolated power output stage drives IGBTs with power ratings of up to 150 A and 1200 V. A high speed internal optical link minimizes the propagation delays between the microcontroller and the IGBT while allowing the two systems to operate at very large common mode voltage differences that are common in industrial motor drives and other power switching applications. An output IC provides localprotection for the IGBT toprevent damage duringovercurrents, and a secondoptical link provides a fullyisolated fault status feedbacksignal for the microcontroller. Abuilt in “watchdog” circuitmonitors the power stage supplyvoltage to prevent IGBT causedby insufficient gate drivevoltages. This integrated IGBTgate driver is designed toincrease the performance andreliability of a motor drivewithout the cost, size, andcomplexity of a discrete design.Two light emitting diodes and twointegrated circuits housed in thesame SO-16 package provide theinput control circuitry, the outputpower stage, and two opticalchannels. The input Buffer IC isdesigned on a bipolar process,while the output Detector IC isdesigned manufactured on a highvoltage BiCMOS/Power DMOSprocess. The forward opticalsignal path, as indicated byLED1, transmits the gate controlsignal. The return optical signalpath, as indicated by LED2,transmits the fault statusfeedback signal. Both opticalchannels are completelycontrolled by the input andoutput ICs respectively, makingthe internal isolation boundarytransparent to themicrocontroller.Under normal operation, theinput gate control signal directlycontrols the IGBT gate throughthe isolated output detector IC.LED2 remains off and a faultlatch in the input buffer IC isdisabled. When an IGBT fault isdetected, the output detector ICimmediately begins a “soft”shutdown sequence, reducing theIGBT current to zero in acontrolled manner to avoidpotential IGBT damage frominductive overvoltages.Simultaneously, this fault status istransmitted back to the inputbuffer IC via LED2, where thefault latch disables the gatecontrol input and the active lowfault output alerts themicrocontroller.During power-up, the UnderVoltage Lockout (UVLO) featureprevents the application ofinsufficient gate voltage to theIGBT, by forcing theHCPL-316J’s output low. Oncethe output is in the high state, theDESAT (V CE) detection feature ofthe HCPL-316J provides IGBTprotection. Thus, UVLO andDESAT work in conjunction toprovide constant IGBTprotection.CC2 OUTEE ECPackage Pin Out16151413121110 912345678V E V LED2+DESAT V CC2V C V OUT V EE V EEV IN+V IN-V CC1GND1RESET FAULT V LED1+V LED1-Package CharacteristicsAll specifications and figures are at the nominal (typical) operating conditions of V CC1 = 5 V, V CC2 - V EE =30 V, V- V = 0 V, and T = +25°C.Ordering InformationSpecify Part Number followed by Option Number (if desired).Example: HCPL-316J#XXXNo Option = 16-Lead, Surface Mt. package, 45 per tube.500 = Tape and Reel Packaging Option, 850 per reel.Option data sheets available. Contact Agilent sales representative, authorized distributor, or visit our WEB site at /go/isolator.Package Outline Drawings16-Lead Surface MountMaximum Solder Reflow Temperature Profile240TIME – MINUTEST E M P E R A T U R E – °C220200180160140120100806040200260(NOTE: USE OF NON-CHLORINE ACTIVATED FLUXES IS RECOMMENDED.)NOTE:INITIAL AND CONTINUED VARIATION IN THE COLOR OF THE HCPL-316J’s WHITE MOLDCOMPOUND IS NORMAL AND DOES NOT AFFECT DEVICE PERFORMANCE OR RELIABILITY.dimensions in: inches(millimeters)0.0180.050Regulatory InformationThe HCPL-316J is pending approval by the following organizations:VDEApproved under VDE0884/06.92with V IORM = 891 Vpeak.ULRecognized under UL 1577,component recognition program,File E55361.CSAApproved under CSA Component Acceptance Notice #5, File CA 88324.VDE 0884 Insulation Characteristics*DescriptionSymbolCharacteristic UnitInstallation classification per DIN VDE 0110/1.89, Table 1 for rated mains voltage ≤150 Vrms I - IV for rated mains voltage ≤300 Vrms I - III for rated mains voltage ≤600 Vrms I - II Climatic Classification55/100/21Pollution Degree (DIN VDE 0110/1.89)2Maximum Working Insulation Voltage V IORM 891V PEAK Input to Output Test Voltage, Method b**V IORM x 1.875 = V PR , 100% Production Test with t m = 1sec,V PR1670V PEAKPartial Discharge < 5 pCInput to Output Test Voltage, Method a**V IORM x 1.5 = V PR , Type and Sample Test, t m = 60 sec,V PR1336V PEAKPartial Discharge < 5 pCHighest Allowable Overvoltage**(Transient Overvoltage t ini = 10 sec)V IOTM 6000V PEAKSafety-limiting values - maximum values allowed in the event of a failure, also see Figure 2.Case Temperature T S 175°C Input Power P S, INPUT 400mW Output PowerP S, OUTPUT1200mW Insulation Resistance at T S , V IO = 500 VR S >109ΩFigure 2. Dependence of Safety Limiting Values on Temperature.* Isolation characteristics are guaranteed only within the safety maximum ratings which must be ensured by protective circuits in application. Surface mount classification is class A in accordance with CECCOO802.** Refer to the optocoupler section of the Isolation and Control Components Designer’s Catalog, under Product Safety Regulations section, (VDE 0884) for a detailed description of Method a and Method b partial discharge test profiles.P S – P O W E R – m WT S – CASE TEMPERATURE – °CInsulation and Safety Related SpecificationsParameter Symbol Value Units ConditionsMinimum External Air Gap L(101)8.3mm Measured from input terminals to output (Clearance)terminals, shortest distance through air. Minimum External L(102)8.3mm Measured from input terminals to output Tracking (Creepage)terminals, shortest distance path along body. Minimum Internal Plastic0.5mm Through insulation distance conductor toGap (Internal Clearance)conductor, usually the straight line distancethickness between the emitter and detector. Tracking Resistance CTI>175Volts DIN IEC 112/VDE 0303 Part 1 (Comparative TrackingIndex)Isolation Group IIIa Material Group (DIN VDE 0110, 1/89, Table 1) Absolute Maximum RatingsRecommended Operating ConditionsElectrical Specifications (DC)Unless otherwise noted, all typical values at T A = 25°C, V CC1 = 5 V, and V CC2 - V EE = 30 V, V E - V EE = 0 V;Switching Specifications (AC)Unless otherwise noted, all typical values at T A = 25°C, V CC1 = 5 V, and V CC2 - V EE = 30 V, V E - V EE = 0 V;21. This is the amount of time the DESATthreshold must be exceeded before V OUT begins to go low, and the FAULT output to go low.22. This is the amount of time from whenRESET is asserted low, until FAULT output goes high. The minimumspecification of 3 µs is the guaranteed minimum FAULT signal pulse width when the HCPL-316J is configured for Auto-Reset. See the Auto-Reset section in the applications notes at the end of this data sheet for further details.23. Common mode transient immunity inthe high state is the maximum tolerable dV CM /dt of the common mode pulse, V CM , to assure that the output will remain in the high state (i.e., V O > 15 V or FAULT > 2 V). A 100 pF and a 3K Ω pull-up resistor is needed in fault detection mode.24. Common mode transient immunity inthe low state is the maximum tolerable dV CM /dt of the common mode pulse, V CM , to assure that the output will remain in a low state (i.e.,V O < 1.0 V or FAULT < 0.8 V).25. Does not include LED2 currentduring fault or blanking capacitor discharge current.26. To clamp the output voltage atV CC - 3 V BE , a pull-down resistor between the output and V EE isrecommended to sink a static current of 650 µA while the output is high.See the Output Pull-Down Resistor section in the application notes at the end of this data sheet if an output pull-down resistor is not used.27. The recommended output pull-downresistor between V OUT and V EE does not contribute any output current when V OUT = V EE .28. In most applications V CC1 will bepowered up first (before V CC2) and powered down last (after V CC2). This is desirable for maintaining control of the IGBT gate. In applications where V CC2 is powered up first, it isimportant to ensure that V in+ remains low until V CC1 reaches the proper operating voltage (minimum 4.5 V) to avoid any momentary instability at the output during V CC1 ramp-up or ramp-down.Notes:1. In accordance with UL1577, each optocoupler is proof tested by applying an insulation test voltage ≥4200 Vrms for 1 second (leakage detection current limit, I I-O ≤ 5 µA).This test is performed before the 100% production test for partial discharge (method b) shown in VDE 0884 Insulation Characteristic Table,if applicable.2. The Input-Output Momentary With-stand Voltage is a dielectric voltage rating that should not be interpreted as an input-output continuous voltage rating. For the continuous voltage rating refer to your equipment level safety specification or VDEO884Insulation Characteristics Table.3. Device considered a two terminal device: pins 1 - 8 shorted together and pins 9 - 16 shorted together.4. In order to achieve the absolutemaximum power dissipationspecified, pins 4, 9, and 10 require ground plane connections and may require airflow. See the ThermalModel section in the application notes at the end of this data sheet for details on how to estimate junction temperature and power dissipation. In most cases the absolute maximum output IC junction temperature is the limiting factor. The actual powerdissipation achievable will depend on the application environment (PCB Layout, air flow, part placement,etc.). See the Recommended PCB Layout section in the application notes for layout considerations.Output IC power dissipation isderated linearly at 10 mW/°C above 90°C. Input IC power dissipation does not require derating.5. Maximum pulse width = 10 µs,maximum duty cycle = 0.2%. This value is intended to allow for compo-nent tolerances for designs with I O peak minimum = 2.0 A. SeeApplications section for additional details on I OH peak. Derate linearly from 3.0 A at +25°C to 2.5 A at +100°C. This compensates for increased I OPEAK due to changes in V OL over temperature.6. This supply is optional. Required only when negative gate drive is implemented.7. Maximum pulse width = 50 µs,maximum duty cycle = 0.5%.8. See the Slow IGBT Gate Discharge During Fault Condition section in the applications notes at the end of this data sheet for further details.9. 15 V is the recommended minimum operating positive supply voltage (V CC2 - V E ) to ensure adequate margin in excess of the maximum V UVLO+ threshold of 13.5 V. For High Level Output Voltage testing, V OH is measured with a dc load current.When driving capacitive loads, V OH will approach V CC as I OH approaches zero units.10. Maximum pulse width = 1.0 ms,maximum duty cycle = 20%.11. Once V OUT of the HCPL-316J isallowed to go high (V CC2 - V E >V UVLO ), the DESAT detection feature of the HCPL-316J will be the primary source of IGBT protection. UVLO is needed to ensure DESAT isfunctional. Once V UVLO+ > 11.6 V,DESAT will remain functional until V UVLO- < 12.4 V. Thus, the DESAT detection and UVLO features of the HCPL-316J work in conjunction to ensure constant IGBT protection.12. See the Blanking Time Controlsection in the applications notes at the end of this data sheet for further details.13. This is the “increasing” (i.e. turn-onor “positive going” direction) of V CC2-V E .14. This is the “decreasing” (i.e. turn-offor “negative going” direction) of V CC2-V E .15. This load condition approximates thegate load of a 1200 V/75A IGBT.16. Pulse Width Distortion (PWD) isdefined as |t PHL - t PLH | for any given unit.17. As measured from V IN+, V IN- to V OUT .18. The difference between t PHL and t PLHbetween any two HCPL-316J parts under the same test conditions.19. Supply Voltage Dependent.20. This is the amount of time from whenthe DESAT threshold is exceeded,until the FAULT output goes low.Performance PlotsFigure 3. I OH vs. Temperature.Figure 5. I OLF vs. V OUT.Figure 6. V OH vs. Temperature.Figure 7. V OL vs. Temperature.Figure 8. V OH vs. I OH .Figure 9: V OL vs. I OL .Figure 10. I CC1 vs. Temperature.Figure 11: I CC2 vs. Temperature.I O H – O U T P U T H I G H C U R R E N T – A-401.0T A – TEMPERATURE – °C 1001.81.6-202.0020401.260801.4I O L – O U T P U T L O W C U R R E N TT A – TEMPERATURE – °C (V O H -V C C ) – H I G H O U T P U T V O L T A G ED R O P – VT A – TEMPERATURE – °C -3-2-1I C C 2 – O U T P U T S U P P L Y C UR R E N T – m AT A – TEMPERATURE – °CI O L F – L O W L E V E L O U T P U T C U R R E N T D U R I N G F A U L T C O N D I T I O N – mA25V OUT – OUTPUT VOLTAGE – V1751252005010015075V O L – O U T P U TL O W V O L T A G E – VT A – TEMPERATURE – °C 0.200.150.250.050.10V O L – O U T P U T L O W V OL T A G E – V0I OL – OUTPUT LOW CURRENT – A 634521I C C 1 – S U P P L Y C UR R E N T – m AT A – TEMPERATURE – °C V O H – O U T P U T H I G H V O L T A G E – V27.4I OH – OUTPUT HIGH CURRENT – mA28.628.429.027.828.027.628.228.8Figure 4. I OL vs. Temperature .Figure 12. I CC2 vs. V CC2.Figure 13. I CHG vs. Temperature.Figure 14. I E vs. Temperature.Figure 15. I C vs. I OUT .Figure 16. DESAT Threshold vs.Temperature.Figure 17. Propagation Delay vs.Temperature.Figure 18. Propagation Delay vs.Supply Voltage.Figure 19. V IN to High Propagation Delay vs. Temperature.Figure 20. V IN to Low Propagation Delay vs. Temperature.I C C 2 – O U T P U T S U P P L Y C U R R E N T – m A2.35V CC2 – OUTPUT SUPPLY VOLTAGE – V 2.552.502.602.402.45I C H G – B L A N K I N G C A P A C I T O R C H A R G I N G C U R R E N T – m A-40-0.30T A – TEMPERATURE – °C 100-20-0.15020408060-0.25-0.20V D E S A T – D E S A T T H R E S H O L D – V-406.0T A – TEMPERATURE – °C 100-207.50204080607.06.5T P – P R O P A G A T I O N D E L A Y – µsT A – TEMPERATURE – °CT P – P R O P A G A T I O N D E L A Y –µsV CC – SUPPLY VOLTAGE – VP R O P A G A T I O N D E L A Y –µs0.25TEMPERATURE – °C 0.450.300.350.40P R O P A G A T I O N D E L A Y – µsTEMPERATURE – °CI E -V E S U P P L Y C U R R E N T – m AT A – TEMPERATURE – °CI C (m A )I OUT (mA)421Figure 21. Propagation Delay vs. Load Capacitance.Figure 22. Propagation Delay vs. Load Resistance.Figure 23. DESAT Sense to 90% V out Delay vs. Temperature.Figure 24. DESAT Sense to 10% V out Delay vs. Temperature.Figure 25. DESAT Sense to Low Level Fault Signal Delay vs. Temperature.Figure 26. DESAT Sense to 10% V out Delay vs. Load Capacitance.Figure 27. DESAT Sense to 10% V out Delay vs. Load Resistance.Figure 28. RESET to High Level Fault Signal Delay vs. Temperature.D E L A Y – µs0.25TEMPERATURE – °C0.4501000.300.350.4050-50D E L A Y – µs1.0TEMPERATURE – °C 3.01.52.02.5D E L A Y – µs1.6TEMPERATURE – °C2.62.22.41.82.0D E L A Y – µs0.0010LOAD RESISTANCE – Ω0.00300.00150.00200.0025D E L A Y – µs4TEMPERATURE – °C126810D E L A Y – µsLOAD CAPACITANCE – nF D E L A Y – µs0.20LOAD RESISTANCE – Ω0.400.250.300.35D E L A Y – m sLOAD CAPACITANCE – nF0.0080.0020.0040.006Test Circuit DiagramsFigure 30. I FAULTL Test Circuit.Figure 31. I FAULTH Test Circuit.Figure 32. I OH Pulsed Test Circuit.Figure 33. I OL Pulsed Test Circuit.Figure 34. I OLF Test Circuit.Figure 35. V OH Pulsed Test Circuit.Figure 36. V OL Test Circuit.Figure 37. I CC1H Test Circuit.Figure 38. I CC1L Test Circuit.Figure 39. I CC2H Test Circuit.Figure 40. I CC2L Test Circuit.Figure 41. I CHG Pulsed Test Circuit.Figure 42. I DSCHG Test Circuit.Figure 43. UVLO Threshold Test Circuit.Figure 44. DESAT Threshold Test Circuit.Figure 45. t PLH , t PHL , t r , t f Test Circuit.Figure 46. t DESAT(10%) Test Circuit.Figure 47. t DESAT(FAULT) Test Circuit.0.1 µFFigure 48. t RESET(FAULT) Test Circuit.Figure 49. UVLO Delay Test Circuit.Figure 50. CMR Test Circuit, LED2 off.Figure 51. CMR Test Circuit, LED2 on.Figure 52. CMR Test Circuit, LED1 off.Figure 53. CMR Test Circuit, LED1 on.ΩΩ3 k 3 kFigure 56. Desat, V OUT , Fault, Reset Delay Waveforms.Figure 54. V OUT Propagation Delay Waveforms,Noninverting Configuration.Figure 55. V OUT Propagation Delay Waveforms, Inverting Configuration.V IN-0 VV IN-Figure 57. I CH Test Circuit.Figure 58. I CH Test Circuit.Figure 59. I CL Test Circuit.Figure 60. I EH Test Circuit.Figure 61. I EL Test Circuit.Typical Application/ OperationIntroduction to Fault Detection and ProtectionThe power stage of a typical three phase inverter is susceptible to several types of failures, most of which are potentially destructive to the power IGBTs. These failure modes can be grouped into four basic categories: phase and/or rail supply short circuits due to user misconnect or bad wiring, control signal failures due to noise or computational errors, overload conditions induced by the load, and component failures in the gate drive circuitry. Under any of these fault conditions, the current through the IGBTs can increase rapidly, causing excessive power dissipation and heating. The IGBTs become damaged when the current load approaches the saturation current of the device, and the collector to emitter voltage rises above the saturation voltage level. The drastically increased power dissipation very quickly overheats the power device and destroys it. To prevent damage to the drive, fault protection must be implemented to reduce orturn-off the overcurrents during a fault condition.A circuit providing fast local fault detection and shutdown is an ideal solution, but the number of required components, board space consumed, cost, and complexity have until now limited its use to high performance drives. The features which this circuit must have are high speed, low cost, low resolution, low power dissipation, and small size.The HCPL-316J satisfies thesecriteria by combining a highspeed, high output current driver,high voltage optical isolationbetween the input and output,local IGBT desaturation detectionand shut down, and an opticallyisolated fault status feedbacksignal into a single 16-pin surfacemount package.The fault detection method,which is adopted in theHCPL-316J, is to monitor thesaturation (collector) voltage ofthe IGBT and to trigger a localfault shutdown sequence if thecollector voltage exceeds apredetermined threshold. A smallgate discharge device slowlyreduces the high short circuitIGBT current to preventdamaging voltage spikes. Beforethe dissipated energy can reachdestructive levels, the IGBT isshut off. During the off state ofthe IGBT, the fault detectcircuitry is simply disabled toprevent false ‘fault’ signals.The alternative protectionscheme of measuring IGBTcurrent to prevent desaturation iseffective if the short circuitcapability of the power device isknown, but this method will fail ifthe gate drive voltage decreasesenough to only partially turn onthe IGBT. By directly measuringthe collector voltage, theHCPL-316J limits the powerdissipation in the IGBT even withinsufficient gate drive voltage.Another more subtle advantage ofthe desaturation detectionmethod is that power dissipationin the IGBT is monitored, whilethe current sense method relieson a preset current threshold topredict the safe limit ofoperation. Therefore, an overly-conservative overcurrentthreshold is not needed to protectthe IGBT.Recommended ApplicationCircuitThe HCPL-316J has bothinverting and non-inverting gatecontrol inputs, an active low resetinput, and an open collector faultoutput suitable for wired ‘OR’applications. The recommendedapplication circuit shown inFigure 62 illustrates a typicalgate drive implementation usingthe HCPL-316J.The four supply bypasscapacitors (0.1 µF) provide thelarge transient currents necessaryduring a switching transition.Because of the transient nature ofthe charging currents, a lowcurrent (5 mA) power supplysuffices. The desat diode and 100pF capacitor are the necessaryexternal components for the faultdetection circuitry. The gateresistor (10 Ω) serves to limitgate charge current and indirectlycontrol the IGBT collectorvoltage rise and fall times. Theopen collector fault output has apassive 3.3 kΩ pull-up resistorand a 330 pF filtering capacitor.A 47 kΩ pulldown resistor onV OUT provides a more predictablehigh level output voltage (V OH).In this application, the IGBT gatedriver will shut down when a faultis detected and will not resumeswitching until themicrocontroller applies a resetsignal.Applications InformationDescription of Operation/TimingFigure 63 below illustrates input and output waveforms under the conditions of normal operation, a desat fault condition, and normal reset behavior.Normal OperationDuring normal operation, V OUT of the HCPL-316J is controlled by either V IN+ or V IN-, with the IGBT collector-to-emitter voltage being monitored through D DESAT . TheFAULT output is high and the RESET input should be held high.See Figure 63.Fault ConditionWhen the voltage on the DESAT pin exceeds 7V while the IGBT is on, V OUT is slowly brought low in order to “softly” turn-off the IGBT and prevent large di/dt induced voltages. Also activated is an internal feedback channel which brings the FAULT output low forFigure 63. Timing Diagram.the purpose of notifying the micro-controller of the fault condition. See Figure 63.ResetThe FAULT output remains low until RESET is brought low. See Figure 63. While asserting the RESET pin (LOW), the input pins must be asserted for an output low state (V IN+ is LOW or V IN- is HIGH). This may beaccomplished either by software control (i.e. of themicrocontroller) or hardware control (see Figures 73 and 74).NORMAL OPERATION FAULT CONDITIONRESETV IN+V IN- 5 V0 V 5 VNON-INVERTING CONFIGUREDINPUTSINVERTING CONFIGUREDINPUTSSlow IGBT Gate Discharge During Fault ConditionWhen a desaturation fault is detected, a weak pull-down device in the HCPL-316J output drive stage will turn on to ‘softly’turn off the IGBT. This device slowly discharges the IGBT gate to prevent fast changes in drain current that could cause damaging voltage spikes due to lead and wire inductance. During the slow turn off, the large output pull-down device remains off until the output voltage falls below V EE + 2 Volts, at which time the large pull down device clamps the IGBT gate to V EE.DESAT Fault Detection Blanking TimeThe DESAT fault detection circuitry must remain disabled for a short time period following the turn-on of the IGBT to allow the collector voltage to fall below the DESAT theshold. This time period, called the DESAT blanking time, is controlled by the internal DESAT charge current, the DESAT voltage threshold, and the external DESAT capacitor. The nominal blanking time is calculated in terms of external capacitance (C BLANK), FAULT threshold voltage (V DESAT), and DESAT charge current (I CHG) ast BLANK = C BLANK x V DESAT/I CHG. The nominal blanking time with the recommended 100 pF capacitor is 100pF*7V / 250µA = 2.8 µsec. The capacitance value can be scaled slightly toadjust the blanking time, thougha value smaller than 100 pF is notrecommended. This nominalblanking time also represents thelongest time it will take for theHCPL-316J to respond to aDESAT fault condition. If theIGBT is turned on while thecollector and emitter are shortedto the supply rails (switching intoa short), the soft shut-downsequence will begin afterapproximately 3 µsec. If the IGBTcollector and emitter are shortedto the supply rails after the IGBTis already on, the response timewill be much quicker due to theparasitic parallel capacitance ofthe DESAT diode. Therecommended 100 pF capacitorshould provide adequate blankingas well as fault response times formost applications.Under Voltage LockoutThe HCPL-316J Under VoltageLockout (UVLO) feature isdesigned to prevent theapplication of insufficient gatevoltage to the IGBT by forcingthe HCPL-316J output low duringpower-up. IGBTs typically requiregate voltages of 15 V to achievetheir rated V CE(ON) voltage. Atgate voltages below 13 Vtypically, their on-voltageincreases dramatically, especiallyat higher currents. At very lowgate voltages (below 10 V), theIGBT may operate in the linearregion and quickly overheat. TheUVLO function causes the outputto be clamped wheneverinsufficient operating supply(V CC2) is applied. Once V CC2exceeds V UVLO+ (the positive-going UVLO threshold), theUVLO clamp is released to allowthe device output to turn on inresponse to input signals. AsV CC2 is increased from 0 V (atsome level below V UVLO+), firstthe DESAT protection circuitrybecomes active. As V CC2 isfurther increased (aboveV UVLO+), the UVLO clamp isreleased. Before the time theUVLO clamp is released, theDESAT protection is alreadyactive. Therefore, the UVLO andDESAT FAULT DETECTIONfeatures work together to provideseamless protection regardless ofsupply voltage (V CC2).。

专利名称:FAULT ISOLATION*DETECTION SYSTEM 发明人:CHIBA HIROICHI,KUROKI SENJI,MATSURA YOSHIAKI申请号:JP15582977申请日:19771224公开号:JPS5923506B2公开日:19840602专利内容由知识产权出版社提供摘要:PURPOSE:To carry out the isolation and detection of the fault for the subscriber line and the network by forming the subscriber circuit and the current division circuit to the trunk in the telephone exchange system. CONSTITUTION:Subscriber line RS is connected with outgoing register trunk ORT. When the defective connection is decided as the result of the channel continuity test, contact co of the cut-off relay is made. And current Ib is flown in division to relay LR of the subscriber circuit. In this case, current Ib is larger than the working current of relay LR with the subscriber put under the off-hook state, and thus the fault of network NW is detected. In case, current Ia flowing to relay A is smaller than the working current of relay A with the subscriber put under the off-hook state, the fault of the subscriber line can be detected.申请人:FUJITSU LTD更多信息请下载全文后查看。
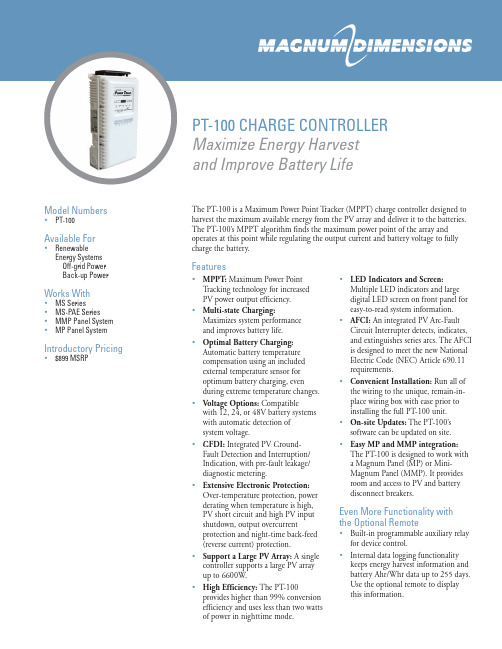
Model Numbers•PT-100Available For•RenewableEnergy SystemsOff-grid PowerBack-up Power Works With•MS Series•MS-PAE Series•MMP Panel System•MP Panel System Introductory Pricing•$899 MSRP The PT-100 is a Maximum Power Point T racker (MPPT) charge controller designed to harvest the maximum available energy from the PV array and deliver it to the batteries. The PT-100’s MPPT algorithm finds the maximum power point of the array and operates at this point while regulating the output current and battery voltage to fully charge the battery.Features•MPPT: Maximum Power PointT racking technology for increasedPV power output efficiency.•Multi-state Charging:Maximizes system performanceand improves battery life.•Optimal Battery Charging:Automatic battery temperaturecompensation using an includedexternal temperature sensor foroptimum battery charging, evenduring extreme temperature changes.•Voltage Options: Compatiblewith 12, 24, or 48V battery systemswith automatic detection ofsystem voltage.•GFDI: Integrated PV Ground-Fault Detection and Interruption/Indication, with pre-fault leakage/diagnostic metering.•Extensive Electronic Protection:Over-temperature protection, powerderating when temperature is high,PV short circuit and high PV inputshutdown, output overcurrentprotection and night-time back-feed(reverse current) protection.•Support a Large PV Array: A singlecontroller supports a large PV arrayup to 6600W.•High Efficiency: The PT-100provides higher than 99% conversionefficiency and uses less than two wattsof power in nighttime mode.•LED Indicators and Screen:Multiple LED indicators and largedigital LED screen on front panel foreasy-to-read system information.•AFCI: An integrated PV Arc-FaultCircuit Interrupter detects, indicates,and extinguishes series arcs. The AFCIis designed to meet the new NationalElectric Code (NEC) Article 690.11requirements.•Convenient Installation: Run all ofthe wiring to the unique, remain-in-place wiring box with ease prior toinstalling the full PT-100 unit.•On-site Updates: The PT-100’ssoftware can be updated on site.•Easy MP and MMP integration:The PT-100 is designed to work witha Magnum Panel (MP) or Mini-Magnum Panel (MMP). It providesroom and access to PV and batterydisconnect breakers.Even More Functionality withthe Optional Remote•Built-in programmable auxiliary relayfor device control.•Internal data logging functionalitykeeps energy harvest information andbattery Ahr/Whr data up to 255 days.Use the optional remote to displaythis information.The World Depends on Sensors and Controls MAGNUM-DIMENSIONS2211 West Casino RoadEverett, Washington 98204 USA425-353-88334467 White Bear PkwySt. Paul, MN 55110 USA800-553-6418 PT-100 CHARGE CONTROLLER SPECIFICATIONSTesting for specifi cations at 25° C. Specifi cations subject to change without notice.March 2015 Rev B Part #64-0660Maximum PV input voltage (any condition)200 VDC + battery voltage or 240 VDC - whichever is lower Maximum PV operating voltage187 VDC Maximum PV array short circuit current100 ADC Nominal battery voltage range12, 24, or 48 VDC Battery charger output voltage range10 to 66 VDC Continuous charger output current100 ADC (from -20 °C to +40 °C) with proportional power reduction up to 60 °C ambient Maximum output power6600 watts Peak (and full power) efficiency>99% (98% typical)Tare loss / nighttime power consumption<2 watts (fan off, display/LEDs off)Charger regulation method Automatic three-stage (bulk, absorption, float) charge with manual equalizationBattery temperature compensation With Battery Temperature Sensor (BTS) connected (battery temperature -20 °C to +55 °C)Internal cooling Using dual ball-bearing fans for long lifeOvercurrent protection With two overlapping circuitsOver-temperature protection On transformer and MOSFETSListings ETL Listed to UL/cUL 1741, CSA C22.2 #107.1-01Warranty Five years parts and laborOperating temperature -20° C to +60° C (-4° F to 140° F)Nonoperating temperature -40° C to +70° C (-40° F to 158° F)Operating humidity 0 to 95% RH non condensingEnclosure type Indoor, ventilated, with removable powder-coated conduit boxUnit dimensions (w x h x d)8.5” x 15.5” x 4.0” (21.6 cm x 39.4 cm x 10.2 cm)Shipping dimensions (w x h x d)11.5” x 19.5” x 8.125” (29.2 cm x 49.5 cm x 20.6 cm)Mounting Mounted on a vertical surface (wall) or installed on MP or MMP enclosureWeight 12.5 lb (5.7 kg)Shipping weight 15 lb (6.8 kg)Max operating altitude15,000’ (4570 m)。


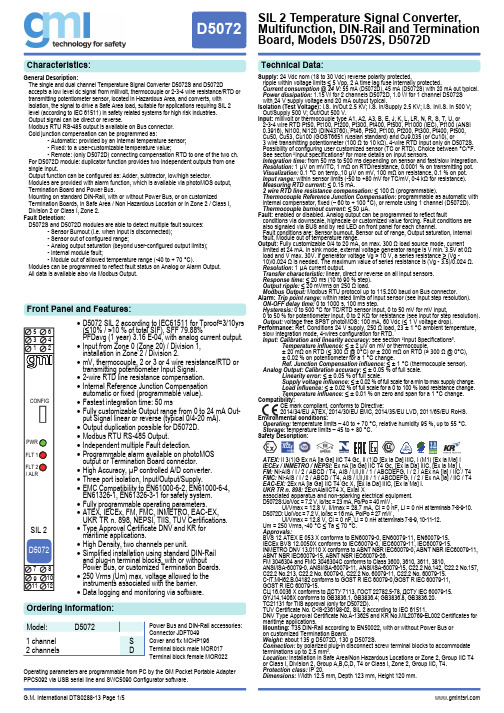
Avago Technologies Optoisolation Product Part Number System Application Bulletin 102IntroductionThe following information is provided to assist in the understanding of the Avago Technologies optocoupler part number nomenclature identification. This document is intended as a general guide to the part-numbering system employed by each family.This document is not intended as a selection guide, and does not contain parametric values for specific devices. For further information on specific products please refer to the respective data sheet. Some part numbers may not appear to fall in the categories contained herein. This does not indicate obsolescence but rather that the specific part number may not exactly match the generalizations in this document. For part numbers not exactly matching the descriptions in this document, please download the ap-propriate data sheet from Avago Technologies' web site () or contact your nearest Avago Technologies representative.Index of Part Numbering SystemAvago Technologies Optocouplers are divided into six main product families and offered in nine packages. For convenience, two tables are provided in this article – one sorted by Product Family (Table 1) and the other sorted by package (Table 2).Table 1. Index of Part Numbering System by Product FamilyProduct Family Description FigurePhototransistor Optocouplers and Digital Optocouplers SO-4, DIP-4, DIP-6 Phototransistor OptocouplersDigital Optocouplers1, 2aAnalog Optocouplers High Linearity, High Bandwidth Analog Optocouplers3 Gate Driver Optocouplers Single and Dual Channel Isolated IGBT Gate Drivers4 Isolated Amplifiers Miniature Isolation Amplifiers5 IPM Interface Optocouplers Intelligent Power Module Interface Optocouplers6 Other Current Loop Transmitter/Receiver and AC/DC to Logic Interface7Table 2. Index of Part Numbering System by PackagePart Number Package Figure HCPL-XXX SO-48ACPL-MXXX/HCPL-MXXX SO-59ACPL-XXXX/HCPL-0XXX SO-810HCPL-XXX300 Mil DIP-411ACPL-WXXX, ACPL-PXXX, ACPL-KXXX SS0-6 and SSO-82a4NXX, CNY17300 Mil DIP-612ACPL-XXXX, HCPL-XXXX, 6N13X300 Mil DIP-813a, 13b ACPL-JXXX, HCPL-JXXX300 Mil DIP-8 (Jade)14 ACNWXXX, HCNRXXXX, HCNWXXXX400 Mil Wide Body DIP-815Figure 1. Phototransistor OptocouplersNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5STANDARD PREFIX4N 6N ACPL CNY HCPL17 (6-PIN DIP)25 (6-PIN DIP)35 (6-PIN DIP)814 (4-PIN DIP)817 (4-PIN DIP)1 = 40 – 80%2 = 63 – 125%3 = 100 – 200%4 = 160 – 320%020 = 5000 V RMS /1 MINUTE UL RATING 060 = IEC/EN/DIN EN60747-5-5 OPTION W00 = 0.4" LEAD SPACING OPTION 300 = LEAD BEND SMD OPTION320 = GULL-WING SMD AND 5000 V RMS /1 MINUTE UL RATING 500 = TAPE AND REEL PACKAGINGW60 = 0.4" LEAD SPACING AND IEC/EN/DIN EN60747-5-5 360 = LEAD BEND SMD AND IEC/EN/DIN EN60747-5-5520 = TAPE AND REEL PACKAGING AND 5000 V RMS /1 MINUTE UL RATING 560 = TAPE AND REEL PACKAGING AND IEC/EN/DIN EN60747-5-500A = RANK MARK A (HCPL-181, -354, -814 AND -817 ONLY)00B = RANK MARK B(HCPL-817 AND HCPL-181 ONLY)00C = RANK MARK C(HCPL-817 AND HCPL-181 ONLY)00D = RANK MARK D (HCPL-817 AND HCPL-181 ONLY)00L = RANK MARK L (HCPL-817 ONLY)xxxE = LEAD FREE OPTIONPHOTOTRANSISTOR AND DIGITAL OPTOCOUPLERS # 1Figure 2a. Digital OptocouplersNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5ACPACKAGE TYPENV PL- = PACKAGE TYPES 0 9 2 W P K 2 = 5 MBd (LOGIC GATE)3 = 8 MBd (LOGIC GATE)4 = 1 MBd (TRANSISTOR OUTPUT)4 = 20 MBd (LOGIC GATE)5 = 1 MBd (TRANSISTOR OUTPUT)6 = 10 MBd (LOGIC GATE)7 = 100 kBd ( DARLINGTON TRANSISTOR OUTPUT)7 = 12.5 - 50 MBd (CMOS OPTOCOUPLER)9 = 100 MBd (DIGITAL ISOLATOR)DIGITAL OPTOCOUPLERS # 2RMS /1 MINUTE UL RATING 5000 V RMS /1 MINUTE UL RATING5000 V RMS /1 MINUTE UL RATING6 - DUAL CHANNEL (in most PN nomenclature)4 - DUAL CHANNELFigure 3. Analog OptocouplersNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5NR PL 200 = 15% TRANSFER GAIN, 0.25% MAXIMUM NONLINEARITY 201 = 5% TRANSFER GAIN, 0.05% MAXIMUM NONLINEARITYANALOG OPTOCOUPLERSRATING EN60747-5-5= IEC/EN/DIN EN60747-5-5 AND UL RATING = GULL-WING SMD OR GULL-WING SMD AND UL RATING OR GULL-WING SMD, UL RATING AND IEC/EN/DIN EN60747-5-5 = GULL-WING SMD AND T&R PACKAGING OR GULL-WING SMD, T&R PACKAGING AND UL RATING OR GULL-WING SMD, T&R PACKAGING, UL RATING AND IEC/EN/DIN EN60747-5-5320 = GULL-WING SMD AND UL RATING520 = GULL-WING SMD, T&R PACKAGING AND UL RATING350 = GULL-WING SMD, UL RATING AND IEC/EN/DIN EN60747-5-5550 = GULL-WING SMD, T&R PACKAGING, UL RATING AND IEC/EN/DIN EN60747-5-5xxxE = LEAD FREE OPTIONFigure 4. Gate Driver OptocouplersGATE DRIVER OPTOCOUPLERS2CouplerPACKAGE TYPENV PL = OTHERSPACKAGE TYPE0 = SO-83 W =P K T J 3XXX X3XXFigure 5. Isolation AmplifiersNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5MINATURE ISOLATED AMPLIFIERS 7 = S0-880 - Differential Output (DIP08)84 - Differential Output (DIP08)86 - Digital Modulator (DIP08)97 - Digital Modulator (DIP08)78 - Differential Output (SS08)79 - Digital modulator88 - Single Ended with Fault DetectionINTELLIGENT POWER MODULE INTERFACE OPTOCOUPLERRMS /1 MINUTE UL RATING RMS /1 MINUTE UL RATING RMS /1 MINUTE UL RATING LEAD FREE OPTION2CouplerPACKAGE TYPEPL = OthersPACKAGE TYPEM = SO-50 = S O-84 J 4xxx x4xxFigure 6. Intelligent Power Module Interface OptocouplerFigure 8. Optocouplers in SO-4 PackageNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5 Figure 7. Current Loop Transmitter/Receiver and AC/DC to Logic InterfaceOPTOCOUPLERS IN SO-4 PACKAGE060 = IEC/EN/DIN EN60747-5-5 OPTION 500 = TAPE AND REEL PACKAGING560 = TAPE AND REEL PACKAGING AND IEC/EN/DIN EN60747-5-500A = RANK MARK A 00B = RANK MARK B 00C = RANK MARK C 00D = RANK MARK DxxxE = LEAD FREE OPTIONFUNCTION TYPE354 - AC INPUT PHOTOTRANSISTOR OPTOCOUPLERCURRENT LOOP TRANSMITTER/RECEIVER ANDAC/DC TO LOGIC INTERFACE300 = GULL-WING SMD500 = TAPE AND REEL PACKAGING xxxE = LEAD FREE OPTION41 = CURRENT LOOP TRANSMITTER 42 = CURRENT LOOP RECEIVERFigure 9. Optocouplers in SO-5 PackageOPTOCOUPLERS IN SO-5 PACKAGE060 = IEC/EN/DIN EN60747-5-5500 = TAPE AND REEL PACKAGING560 = TAPE AND REEL PACKAGING AND IEC/EN/DIN EN60747-5-5xxxE = LEAD FREE OPTIONACPL4 = IPM INTERFACE OPTOCOUPLER5 = 1 MBd DIGITAL OPTOCOUPLER6 = 10 MBd DIGITAL OPTOCOUPLER7 = 15 MBd / 100 kBd DIGITAL OPTOCOUPLERFigure 11. Optocouplers in 300 Mil DIP-4 PackageNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5 Figure 10. Optocouplers in SO-8 PackageOPTOCOUPLERS IN SO-8 PACKAGE3 - DUAL CHANNELSTANDARD PREFIXACPL7 = 100 kBd, 12.5 - 50 MBd DIGITAL OPTOCOUPLER 9 = 100 MBd (Digital Isolator)OPTOCOUPLERS IN 300 MIL DIP-4 PACKAGE060 = IEC/EN/DIN EN60747-5-5 OPTION W00 = 0.4" LEAD SPACING OPTION 300 = LEAD BEND SMD OPTION 500 = TAPE AND REEL PACKAGINGW60 = 0.4" LEAD SPACING AND IEC/EN/DIN EN60747-5-5360 = LEAD BEND SMD AND IEC/EN/DIN EN60747-5-5560 = TAPE AND REEL PACKAGING AND IEC/EN/DIN EN60747-5-500A = RANK MARK A 00B = RANK MARK B 00C = RANK MARK C 00D = RANK MARK D 00L = RANK MARK LxxxE = LEAD FREE OPTION817 - PHOTOTRANSISTOR OPTOCOUPLEROPTOCOUPLERS IN 300 MIL DIP-6 PACKAGEOPTIONS060 = IEC/EN/DIN EN60747-5-5 OPTION W00 = 0.4" LEAD SPACING OPTION 300 = LEAD BEND SMD OPTION 500 = TAPE AND REEL PACKAGINGW60 = 0.4" LEAD SPACING AND IEC/EN/DIN EN60747-5-5360 = LEAD BEND SMD AND IEC/EN/DIN EN60747-5-5560 = TAPE AND REEL PACKAGING AND IEC/EN/DIN EN60747-5-5xxxE = LEAD FREE OPTION4N CNYFUNCTION TYPE17 - HIGH V 1 = 40 – 80%2 = 63 – 125%3 = 100 – 200%4 = 160 – 320%Figure 12. Optocouplers in 300 Mil DIP-6 PackageNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5 Figure 13a. Optocouplers in 300 Mil DIP-8 PackageOPTOCOUPLERS IN 300 MIL DIP-8 PACKAGERMS /1 MINUTE UL RATING 5000 V RMS /1 MINUTE UL RATING5000 V RMS /1 MINUTE UL RATING IEC/EN/DIN EN60747-5-56 - DUAL CHANNELSTANDARD PREFIX45 = 1 MBd DIGITAL OPTOCOUPLER OR VIDEO COUPLER 46 = 10 MBd DIGITAL OPTOCOUPLER 47 = 100 kBd DIGITAL OPTOCOUPLER77 = 12.5 - 50 MBd DIGITAL OPTOCOUPLER 78 = ISOLATION AMPLIFIER90 = 100 MBd DIGITAL ISOLATOR T2 = GATE DRIVE OPTOCOUPLER T3 = GATE DRIVE OPTOCOUPLERFigure 13b. Optocouplers in 300 Mil DIP-8 PackageNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5OPTOCOUPLERS IN 300 MIL DIP-8 PACKAGEOPTIONS 020 = 5000 V RMS /1 MINUTE UL RATING 060 = IEC/EN/DIN EN60747-5-5300 = GULL-WING SMD500 = TAPE AND REEL PACKAGING 320 = GULL-WING SMD AND 5000 V RMS /1 MINUTE UL RATING360 = GULL-WING SMD AND IEC/EN/DIN EN60747-5-5520 = TAPE AND REEL PACKAGING AND 5000 V RMS /1 MINUTE UL RATING560 = TAPE AND REEL PACKAGING AND IEC/EN/DIN EN60747-5-5xxxE = LEAD FREE OPTION6 = 1 MBd DIGITAL OPTOCOUPLER7 = 10 MBd DIGITAL OPTOCOUPLER8 = 100 kBd DIGITAL OPTOCOUPLER9 = 100 kBd DIGITAL OPTOCOUPLERFigure 14. Optocouplers in 300 Mil DIP-8 (Jade) PackageOPTOCOUPLERS IN 300 MIL DIP-8 (JADE) PACKAGEOPTIONS060 = IEC/EN/DIN EN60747-5-5300 = GULL-WING SMD500 = TAPE AND REEL PACKAGING360 = GULL-WING SMD AND IEC/EN/DIN EN60747-5-5560 = TAPE AND REEL PACKAGING AND IEC/EN/DIN EN60747-5-5xxxE = LEAD FREE OPTIONSTANDARD PREFIX31 = GATE DRIVER OPTOCOUPLER 45 = 1 MBd DIGITAL OPTOCOUPLERFigure 15. Optocouplers in 400 Mil Widebody DIP-8 PackageFigure 16. Optocouplers in SO-16 (Jade) PackageNotes:1. Option "xxxE" is available together with other options, for example option "560E" means "TAPE AND REEL PACKAGING. IEC/EN/DIN EN60747 5-5OPTOCOUPLERS IN 400 MIL DIP-8 WIDEBODY PACKAGERMS /1 MINUTE UL RATING 5000 V RMS /1 MINUTE UL RATING 5000 V RMS /1 MINUTE UL RATINGVIDEO OPTOCOUPLERSTANDARD PREFIXNR 135 = 1 MBd DIGITAL OPTOCOUPLER 136 = 1 MBd DIGITAL OPTOCOUPLER 137 = 10 MBd DIGITAL OPTOCOUPLER 138 = 100 kBd DIGITAL OPTOCOUPLER 139 = 100 kBd DIGITAL OPTOCOUPLER200 = 15% TRANSFER GAIN ANALOG OPTOCOUPLER 201 = 5% TRANSFER GAIN ANALOG OPTOCOUPLER 261 = 10 MBd DIGITAL OPTOCOUPLEROPTOCOUPLERS IN SO-16 (JADE) PACKAGE3X = GATE DRIVE OPTOCOUPLER 78 = ISOLATION AMPLIFIERFor product information and a complete list of distributors, please go to our web site: Avago, Avago Technologies, and the A logo are trademarks of Avago Technologies in the United States and other countries.Data subject to change. Copyright © 2005-2012 Avago Technologies. All rights reserved. Obsoletes 5989-0341EN AV02-3324EN -January 17, 2012Figure 17. Optocouplers in 500 mil DIP-10 WideBody PackageOPTOCOUPLERS IN 500 MIL DIP-10 WIDEBODY PACKAGEOPTIONS 300 = GILL-WING SMD AND 5000 V RMS /1 MINUTE UL RATING OR GILL-WING SMD, 5000 V RMS /1 MINUTE UL RATING AND IEC/EN/DIN EN60747-5-5500 = TAPE AND REEL PACKAGING, GULLAND 5000 V RMS /1 MINUTE UL RATING ORTAPE AND REEL PACKAGING, GULL-WING SMD,5000 VRMS/1 MINUTE UL RATING AND IEC/EN/DIN EN60747-5-5xxxE = LEAD FREE OPTIONPACKAGE TYPE2601 = 10 MBd DIGITAL OPTOCOUPLER4506 = IPM & Gate Drive InterfaceOPTOCOUPLER。

White Paper Safety of unearthed (IT)DC power sy stemsSafety of unearthed (IT)DC power systemsAbstract --- Ungrounded, unearthed, “floating” or IT (Isolé-terré or Isolated Terra) are all terms used to describe power systems that have no intentional conductive connection to earth’s or chassis ground. The main advantage of the IT power system is that a single “short” will not disable its ability to continue delivering power. It is es-sential for the safety of such systems to continuously monitor their isolation state as even a single fault can generate hazards to personnel in contact with these systems. “Isolation monitors” are the devices required by several international standards to perform this function. This paper reviews the potential hazards in an IT system and the most common methods employed today for detection of isolation faults. It identi-fies safety related shortcomings inherent to each method and illustrates some of the unique features of Sendyne’s SIM100 designed to overcome them.Keywords --- isolation monitor; ground fault detection; symmetrical faults; EV safety; charging station safetyUngrounded, unearthed, “floating” or IT (Isolé-ter-ré or Isolated Terra) are all terms used to describe power systems that have no intentional conduc-tive connection to earth’s or chassis ground. The main advantage of the IT power system is that a single “short” will not disable its ability to contin-ue delivering power. Figure 1 illustrates the basic topology of such a system.The resistive connections, shown in Fig 1, between the terminals of the power source and the chas-sis are referred to as the “isolation resistances” (,ISO PR and ,ISO NR) and they represent the par-allel combination of all resistive paths from the power source terminals to the chassis (including the ones the isolation monitor introduces). The values of isolation resistances are desirable to be high so leakage currents that travel through them are kept to a harmless minimum. The capacitors shown represent the parallel combination of all capacitances present, including the Y-capacitorstypically used in DC IT systems to suppress EMI. The values of Y-capacitors are kept within limits in order to avoid hazardous accumulation of en-ergy. The voltages Vp and Vn are shown each to be equal with half the battery voltage, which will be the case if the values of ,ISO P R and ,ISO N R are equal.Isolation faultsIf either of the isolation resistances decreases be-low the threshold of 100 Ohms/Volt a hazard oc-curs if a person makes contact with the terminal “opposite” to the leaking resistor. This hazardoussituation is illustrated in Figure 2.This contact closes the circuit and current flows through a person’s body. Note that although it is shown that Vn < Vp in this example, an isolationfault cannot be detected based solely on voltage readings. The following illustrations show two examples where an isolation fault may be present while Vn = Vp .A “symmetrical” or “double” isolation fault may occur through insulation failures in power connec-tors or other environmental and intrusion reasons and, depending on the value of leakage currents, may cause power loss, overheating and even fire.Detection of these types of faults is an absolute re-quirement for the safety of IT power systems. Capacitive faultsOf equal importance to personal safety is another type of hazard. While international standards do not yet require it to be monitored, it is the haz-ard that can be caused by excessive energy stored in the IT power system capacitors. IT system de-signers ensure that design values of Y-capacitors prevent energy storage beyond the safety limit of 0.2 J. Sub-system failures, such as a coolant leak-age or personnel interventions, may alter the orig-inally designed capacitance values. In this case energy discharged through a person’s body can create a hazardous event as shown in Fig. 5. Note that the stored energy limits are set for theparallel combination of all capacitances between the power terminals and chassis.Sendyne’s SIM100 is the only isolation monitor today that tracks dynamically IT system’s capac-itances and reports the maximum energy that can be potentially stored in them.Figure 2: Single isolation faultbattery packFault detection methodsWhile there are several methods traditionally used in the field for the implementation of an isolation monitoring function, they can be broadly grouped in three main categories that will be described in the following sections.Voltage methodThis method is the simplest one and relies ex-clusively on voltage measurements between each power pole and the chassis. It depends on the ob-servation that a single isolation fault will create an imbalance between the two voltages Vp and Vn. If the initial values of isolation resistances are known by some method, the voltage ratio between Vp and Vn can be used to estimate the value of a single faulty isolation resistance. As it was illus-trated in the previous sections, this method com-pletely fails to detect “symmetrical” or any type of concurrent faults, where both isolation resistances change, and it is not acceptable in any product that intends to be safe.Resistance insertion methodSpecific safety related standards such as the ISO 6469-1, SAE J1766 and CFR 571.305, speci-fy a method for estimating isolation resistances through insertion of a known value resistor. The method involves two steps:STEP 1: Measure V P and V N and determine the lower of the two.STEP 2: Connect a known resistance R 0 in parallel to the isolation resistance of the higher voltage (V P >V N ) as shown in Figure 7 and measure again the two new voltage values 'P V and 'N V .The ,ISO N R can be shown to equal:',0'1N P P ISO NP P V V V R R V V −=+There are several issues with this method. In or-der to be accurate, R0 has to be selected in the range of 100 to 500 Ω/V. This is exactly the range in which the isolation system becomes hazardous, which means that during the measurement period the system becomes deliberately unsafe. A second issue is that during the measurement the voltage should be stable. This requirement severely lim-its the utility of the method in systems that have active loads most of the time. A third issue is re-lated to cost, size and reliability, as inserting and de-inserting the test resistor in the high voltage system requires expensive and bulky relays. For these reasons the method is not utilized in active IT systems.Current measurement methodA variation of the voltage method that is refer-enced frequently, especially in quick charger specifications, is the current measurement meth-od. It appears in international standards like IEC 61851-23, IEEE 2030.1.1 and in CHAdeMO spec-ifications. An illustration of this method is shown in Figure 8. Two equal value resistors R along with a current measuring device are simultaneously connected to the power rails as shown in the il-lustration. The current measurement device mea-sures the current that goes through it and deter-mines the value of the fault isolation resistor R F according to the relationship:2bg F V i R R =+where:i g is the measured current R is the grounding resistor R Fis the insulation resistanceThis method has all the drawbacks of the voltage method described previously, such as that it can-not detect symmetric isolation faults. Worse, the resistors R have to have a low resistance value in order to provide measurement accuracy around the isolation fault values and at the same time set-tle capacitances quickly. In a 500 V IT system the R s used are specified to only 40 kΩ, while the fault isolation value calculated by the 100 Ω/V rule is 50 kΩ. It is obvious that while these resistances remain connected the system is not safe. This is the reason that all of the mentioned internationalstandards specify a “Maximum detection time” to be less than 1 s. What these specifications mean (although they do not state it explicitely) is that if the current measurement method is used, it is un-safe for the circuit to remain connected for more than a second.In addition, the measurement sensitivity of this method is optimized around the fault values of the isolation resistances thus it cannot provide accu-rate estimates for the actual values outside this range. This is the reason that some standards re-quire a self check to be implemented by insertion of a fault resistor in the IT system. For a 500 V sys-tem , the insertion of a “fault resistor” of 50 kΩ will create a potential hazard by allowing more than 20 mA -twice the limit - fault current.Because the current measurement method was utilized in the early days of quick charging, many standards still reference it.In the end of 2017 the International Organization for Standardization (ISO) issued a letter regarding IEC 61851-23 stating:“It is, as always, strongly recommended that users of standards additionally perform a risk assessment. Specifically in this case, standards users shall select proper means to fulfill safety re -quirements in the system of charging station and electric vehicle.”Signal injection methodTo overcome the limitations of the previously described methods, a signal injection method is utilized in most of today’s isolation monitoring devices. While there are many variations in the method, in principle the implementation is the same and is illustrated in Figure 9.A known current X i is injected in a branch of the isolation circuit, forcing a change in the respective voltage. In the example shown in Figure 9 the value of the parallel combination of the isolation resistances ISO R will be:ISO XV R i ∆=Implementations of this method vary in the way the signal is injected, the method utilized for cal-culating its value, the signal shape, duration and amplitude and other details.One variation (Nissan US Pat. 6,906,525 B2 ) re-lies on the injection of a pulsed signal through a coupling capacitor and then detecting the attenu-ation of the original signal due to the presence of an isolation resistance.Some of the issues with the signal injection meth-od include:• An active IT power system (or battery) willinterfere with the signal used to identify isolation resistance. Therefore this method can be effective only when there is no inter-fering load activity.• The DC injection method can take a longtime to make a determination depending on the time constant of the RC isolation circuits.• The AC injection method by design cannotbe accurate in the whole range of possi-ble isolation resistance values. It is opti-mized for the range of fault resistance (100 Ohms/V or 500 Ohm/V) and provides only an estimate of the parallel combination of isolation resistances.known square pulse through a coupling capacitor and de-tecting the attenuation of the signal by the isolation resis-tances/capacitors.Sendyne’s SIM100Sendyne’s patent pending method for monitoring the isolation state of the IT power system over-comes all shortcoming of the methods described in the previous section. Specifically, the SIM100 is capable of estimating accurately the state of the isolation system when the load is active and the battery voltage is continuously varying. This unique feature, while important for the safety of every IT electrical system, is especially important for the safety of systems that are engaged in com-mercial activities with very little down time, such as commercial vehicles and equipment.The SIM100 is the only product in the market to-day that provides estimates for the isolation sys-tem capacitances. Besides the added safety pro-vided by estimating the energy stored in them, capacitances estimation is necessary to be able to analyze the isolation system behavior dynamically and during transitions. Sendyne utilizes state-of-the-art stochastic filtering and numerical meth-ods to evaluate the isolation state dynamically and accurately. The SIM100 provides individual estimates for each isolation resistance and capac-itance along with the uncertainty in their calcula-tion. Typical accuracy of SIM100’s estimates is better than ±5%.SIM100 response timeThe SIM100 refreshes its estimates every 500 ms. Slow changes in the system isolation state can be tracked and updated within this interval. For large changes, such as the ones described in the UL 2231 tests, the response time of the SIM100 is less than 5 s.As can be seen in Figure 13, SIM100 provides stable and accurate results within 5 sec of the transition. Response time is well below the 10 s requirement by different standards. Subsequent estimates are updated every 500 ms. In the same chart, highlighted in grey, are the ±15% accuracy levels specified by UL 2231-1 and 2. SIM100 esti-mate errors are below ±3%. During the transition and while SIM100 is estimating the new isolation state, it will indicate a high level of uncertainty, so the host ECU can ignore those transition results. Similar results were obtained when operating the SIM100 of the positive side of the battery.lation state taking into consideration the varying batteryvoltage and the Y-capacitances.∙V∙Vand accuracy in the successive insertion of a 200 Ohm/Vand 100 Ohm/V resistor (RF,N)BATT100*VBATT30405060708090100110120Resistance(kΩ)Time (s)Estimates of RF,Nin 10 experiments & response times (25 o C)Figure 13: Estimates of RF,Nprovided in 10 successive experimentsat room temperature. The green line represents the actual value ofthe inserted resistor. Greyed areas show UL2231-2 accuracy require-ments.Thermal stabilityPer UL 2231-2, the SIM100 was tested using the test apparatus of Figure 12 at different environ-mental temperatures. In the following illustra-tions the colored dots indicate the average error at each temperature obtained through approximate-ly 1100 reports. The experiments were repeated for different Y-capacitor values (2 x 100 nF and 2 x 1 uF). The greyed areas show the spread of error in the reports indicating the max and min error for each experiment. We illustrate the worst case er-rors that occur at the smaller insertion resistance R F,x . As can be seen all errors are well below the ±15% of the UL requirements.-505E s t im a t e e r r o r (%)Temperature o CAverage, min & max error for R F,N = 100 Ω/V * 500 V-20-15-10-505101520E s t i m a t e e r r o r (%)Temperature O CAverage, min & max error for R = 100 Ω/V * 500 VFigure 14: Inserted resistance estimate error at different temperaturesUncertaintyThe SIM100 submits along with each report an estimate of the uncertainty associated with the estimates. The uncertainty is reported as a per-centage of the estimated values and takes into consideration both the measurement and pro-cessing uncertainties. Uncertainty is derived in the interval of two standard deviations (95.45% of samples) and rounded to the next higher absolute value. For example, if the uncertainty calculated is ±1.4 % it will be rounded to ±2%. The SIM100 then adds to this value another ±3% to accommo-date for factors that cannot be calculated, such as part values shifting over age, etc. As a result, the uncertainty value provided is a conservative one. An illustration of the relationship between mea-surements distribution and uncertainties report-ed is shown in Figure 15. The green vertical line shows the actual value of the isolation resistance of the test circuit. Its value is the parallel combi-nation of the 250 kΩ inserted resistance with the 2.7 MΩ resistance of the SIM100. The red vertical line shows the average value of SIM100 reports; the actual estimate error is 1.8%. Uncertainty is estimated to ±2% and then augmented by ±3% to provide the final estimate of ±5%. As can be seen in this experiment, uncertainty provides a very+5%-5%Reported Uncertainty (%)250 kΩ20406080100120140160180FrequencyRF,P(kΩ)Histogram of RF,Pestimates over 10 experiments (25 o C)Figure 15: Distribution of reports over 1200 measurements and illustration of uncertainty reported by SIM100conservative estimate of the reported value.How to use the uncertaintyUncertainties should be used in the most conser-vative way to calculate worst case scenarios. If, forexample, the SIM100 reports a value of 100 kΩwith uncertainty of ±5%, the host should assumethe worst case possibility that the actual isolationresistance is (100 – 5) kΩ.Very high uncertaintiesThere may be instances that the SIM100 reportsvery high uncertainties. This may happen whenthere is no voltage present and there is a lot ofnoise in the IT system or during a large and rapidtransition of isolation resistance values. Duringthese instances, the SIM100 will flag the “HighUncertainty” bit to notify the host that these re-ports may be discarded.Uncertainties in capacitance estimatesWhen there is no activity on the IT power system itis expected that individual capacitance estimateswill have a high level of uncertainty. Nevertheless,the total value of isolation capacitance (the parallelcombination of all capacitances) and the estimatesfor maximum energy that can be stored on themwould be accurate. The uncertainty in capacitanceestimation will become small (less than ±5%) assoon as there is activity on the IT power bus.Variable loadsThe SIM100 is the only product today that can op-erate flawlessly in extremely noisy environments when the load of the IT power system is active. This is an important safety feature especially in commercial environments where the electrical equipment is in use most of the time. The SIM100 will provide accurate estimates even while the power system experiences violent swings of 10s or 100s of Volts.Figure16 shows the test setup and SIM100 re-sponses under a battery load corresponding to an accelerated driving profile. In the test circuita 250 kΩ resistor is connected and disconnected every 60 s. At the battery terminals an accelerat-ed driving profile load is simulated. The result-ing battery voltage is shown in the Battery voltage chart. The greyed areas indicate the 60 s intervals when the resistor is disconnected. The histogram shows the distribution of SIM100 reports in the periods when the resistor is connected.The green vertical lines in the histogram show the actual isolation resistance when the 250 kΩ resis-tor is connected. As can be seen in the histograms, the error between the average reported value and the actual value is less than 1%.R F = 250 kΩTest CircuitLoadI ,N501001502002503003500120240360480600720840960108012001320V B A T (V )Time (s)SWSW SW SW SW SW SW SW SW SW SWF r e q u e n c yHistograms of SIM100 R F estimates229230231229230231229230231229230231229230231229230231229230231229230231229230231229230231229230231Green line indicatesactual R F value 1% errorBattery voltage - Accelerated driving profileFigure 16: Distribution of reports over 1200 measurements and illustration of uncertainty reported by SIM100SIM100 Self-testingThe SIM100 performs a continuous self-testingprocess. During the self-test, the SIM100 checksthe validity of all connections and the integrity ofall references and critical hardware components.Details on the self-test process can be found in the“SIM100 Safety Manual”Field upgradeableThe SIM100 comes equipped with Sendyne’s pro-prietary boot-loader. The boot-loader relies onAES128 cryptographic standard to ensure thatfirmware updates are not compromised. It can beaccessed through CAN -bus and allows field up-grades of the SIM100 software.CAN communicationsThe SIM100 CAN protocol description can befound in the “SIM100 CAN 2.0B Protocol Docu-ment” and the “SIM100.dbc” files. The SIM100can be ordered with CAN running at 250 kb/s or500 kb/s. The SIM100MOD can be ordered withor without CAN bus termination resistors. For in-formation on ordering see the “Ordering informa-tion” section of the SIM100MOD datasheet.SENDYNE SENSING PRODUCTS WHITE PAPER| 11© 2019 Sendyne Corp.Sendyne Corp250 West BroadwayNew York, NY 10013Forthelatestproductinformationemail:****************©2019 Sendyne Corp, all rights reserved. This document contains information that is proprietary to Sendyne Corp. and may be duplicated in whole or in part by the original recipient for internal business purposes only, provided that this entire notice appears in all copies.In accepting this document, the recipient agrees to make every reasonable effort to prevent unauthorized use of this information. All trademarks mentioned in this document are the trademarks of their respective owners.。