电机学课程设计-华中科技大学
- 格式:docx
- 大小:257.15 KB
- 文档页数:12
华科电机学课程设计一、课程目标知识目标:1. 学生能理解电机的基本工作原理,掌握电机的主要结构和功能。
2. 学生能够掌握电机类型及各自的特点,了解其在工程实践中的应用。
3. 学生能够解释并计算电机的基本参数,如电压、电流、功率、效率等。
技能目标:1. 学生能够运用电机的基本原理,分析和解决实际电机运行中的一般问题。
2. 学生能够设计简单的电机实验,通过实验操作来验证理论知识。
3. 学生能够使用适当的工具和技术,对电机系统进行故障诊断和维护。
情感态度价值观目标:1. 培养学生对电机学领域的兴趣,激发其探索精神和创新意识。
2. 强化学生的团队合作意识,通过合作学习培养沟通协调能力。
3. 增强学生的环保意识,理解电机在节能减排中的重要作用,培养其社会责任感。
课程性质:本课程为专业性较强的技术课程,旨在通过理论与实践相结合的方式,使学生深入理解电机的工作原理和工程应用。
学生特点:假设学生为高中年级,已具备基本的物理知识和一定的数学基础,对电机有一定的好奇心,但实践经验不足。
教学要求:课程需结合理论讲解与实验操作,注重培养学生的实践能力。
课程目标具体、可衡量,以便在教学过程中不断评估学生的学习成果,并根据实际情况调整教学策略。
二、教学内容1. 电机的基本原理与结构- 磁场与电磁感应的基本概念- 电机的主要类型及其工作原理- 电机的基本结构组成与功能2. 电机参数与性能分析- 电机电路的基本方程与参数计算- 电机的功率、效率、转速等性能指标- 电机特性曲线及其在实际应用中的意义3. 电机应用与案例分析- 常见电机类型在工业、生活中的应用案例- 电机选型原则与方法- 电机系统故障分析与维护4. 电机实验与操作- 设计简单电机实验,如电机启动、制动、调速等- 实验操作指导与安全规范- 实验数据分析与处理教学内容安排与进度:第1-2周:电机的基本原理与结构第3-4周:电机参数与性能分析第5-6周:电机应用与案例分析第7-8周:电机实验与操作教材章节关联:第1章:电机概述与基本原理第2章:电机结构与设计第3章:电机性能分析第4章:电机应用与实验教学内容根据课程目标制定,保证科学性和系统性。

电机学课程设计设计目的本课程设计旨在帮助学生深入了解电机的基本结构、原理及运转方式,掌握电机的设计方法及相关参数的计算,并运用所学知识设计并制作出一款电机模型,提升学生的实践能力和解决实际问题的能力。
设计内容理论部分基础知识回顾本部分主要复习电机的基本概念、分类、构造和工作原理,使学生对电机有一个全面的了解。
参数计算本部分主要涵盖电机绕组的导线截面积、导体长度、绕组匝数等参数的计算方法,以及磁场强度、反电势、满载转矩等参数的计算方法,并通过例题演示其应用。
磁路分析本部分主要讲解电机磁路的分析方法,包括磁路线和磁通量的计算,应用Maxwell方程组解决电机磁路问题,并通过实际案例分析电机反电势的产生原因和调节方法。
实践部分电机模型设计根据学生所学知识,设计一款电机模型,包括电机的定子、转子、绕组等部分,确定合适的参数和计算方法,并通过模型的制作和实验验证其性能。
电机控制电路设计结合实际应用,设计一款电机控制电路,实现电机转速调节、反转等功能,要求能够满足实际工程需求,并运用所学知识提高电路的效率和可靠性。
设计流程1.确定课程设计主题和目的;2.进行电机基础知识的复习和参数计算的学习;3.学习电机磁路分析的方法,分析并解决实际问题;4.设计电机模型,制作实验并验证其性能;5.设计电机控制电路,实现电机控制功能;6.总结并反思本次课程设计,提高实践能力和解决实际问题的能力。
设计成果学生将通过课程设计,掌握电机的基本结构、工作原理和设计方法,进一步提高实践能力和解决实际问题的能力。
学生将制作出一款可运转的电机模型,并实现电机控制电路的设计,达到了理论与实践相结合的目的,为今后的学习和工作打下坚实的基础。
参考文献1.葛劲松等. 电机原理与设计[M]. 北京:清华大学出版社,2016.2.王正华. 电机控制技术[M]. 北京:机械工业出版社,2016.3.马赛克. 电机设计实践[M]. 北京:电子工业出版社,2017.。
《电机学》课程设计单绕组变极双速异步电机学院电气与电子工程学院专业电气工程及其自动化班级学号U*********姓名日期2014年2月20日成绩指导教师周理兵电机学课程设计任务书(201107班-周理兵组19位同学用)2014.1.10课题:单绕组变极双速三相交流绕组设计说明:一台三相鼠笼型交流异步电动机,定子一套绕组,若采用绕组(引出线)改接变极调速实现双速运行,则称为单绕组变极双速交流绕组。
任务要求:(1)定子48槽,4/8极,采用双层叠绕组,支路数、相带和节距自选;(2)绕组引出线6根;(3)画出两种极数下对应的槽电势星型图和三相绕组联接图;(4)根据所选节距和绕组方案,分析两种极对数下气隙基波磁密关系;(5)计算两种情况下相应的绕组系数,并分析谐波情况。
***每位同学必须独立完成设计和提交报告;设计报告必须在下学期开学第一周五下午5点钟之前交到电机楼202;若设计报告出现雷同(含部分雷同),则相互雷同的同学均取消成绩目录【题目分析】 (1)【变级原理】 (1)【接线方式】 (2)【绘制槽电动势星型图】 (3)【分相】 (4)【节距的分析与确定】 (4)【绘制绕组展开图】 (5)【分析气隙基波磁密】 (8)【绕组系数与谐波分析】 (9)【小结】 (9)【题目分析】三相鼠笼型交流异步电动机,转子是鼠笼型,其相数、极对数自动与定子保持一致,异步电动机的转差率s =n 1−n n 1,又因为s 很小,这样n ≈n 1=60f 1p。
由此可见,当极对数改变后,异步电动机的转速会发生改变。
【变级原理】参见课本《电机学(第三版)》中P262-P263有如下的变极原理。
如图1.1有一个四级电机的A 像绕组示意图,在如图的电流方向a1→x1→a2→x2下,它产生了磁动势基波级数2p=4。
如图1.2 改接,即a1与x2连接作为首端A ,x1与a2相连接,作为末端X ,则它产生的磁动势基波极数2p=2,这样就实现了单绕组变极。
电机学课程设计任务书一、课程设计目的和要求1 目的通过设计实践,培养学生查阅专业资料、工具书或参考书,掌握现代设计手段和软件工具,并能以仿真程序及仿真结果表达其设计思想的能力。
2 要求1)搭建系统仿真电路还或者搭建实际电路;2)提供仿真系统参数,(可自行设计或使用题目提供相关参数);3)绘制相关参数曲线;4)分析对比相关控制参数,给出相应结论。
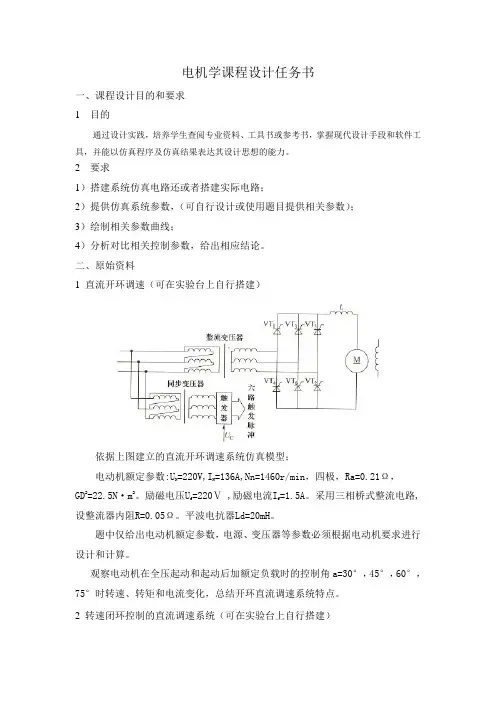
二、原始资料1 直流开环调速(可在实验台上自行搭建)依据上图建立的直流开环调速系统仿真模型;电动机额定参数:UN =220V,IN=136A,Nn=1460r/min,四极,Ra=0.21Ω,GD2=22.5N·m2。
励磁电压Uf =220Ⅴ ,励磁电流If=1.5A。
采用三相桥式整流电路,设整流器内阻R=0.05Ω。
平波电抗器Ld=20mH。
题中仅给出电动机额定参数,电源、变压器等参数必须根据电动机要求进行设计和计算。
观察电动机在全压起动和起动后加额定负载时的控制角a=30°,45°,60°,75°时转速、转矩和电流变化,总结开环直流调速系统特点。
2 转速闭环控制的直流调速系统(可在实验台上自行搭建)依据上图建立转速闭环控制的系统仿真模型;电动机额定参数:UN =220V,IN=136A,Nn=1460r/min,四极,Ra=0.21Ω,GD2=22.5N·m2。
励磁电压Uf =220Ⅴ ,励磁电流If=1.5A。
采用三相桥式整流电路,设整流器内阻R=0.05Ω。
平波电抗器Ld=20mH。
题中仅给出电动机额定参数,电源、变压器等参数必须根据电动机要求进行设计和计算。
分别采用比例调节,比例-积分调节,带电流截止负反馈调节三种方法观察电动机在全压起动和起动后加额定负载时的转速响应、电压响应和电流响应变化,总结转速闭环控制直流调速系统特点。
3 直流双闭环调速系统(可在实验台上自行搭建)依据上图建立的直流双闭环调速系统仿真模型;电动机额定参数:UN =220V,IN=136A,Nn=1460r/min,四极,Ra=0.21Ω,GD2=22.5N·m2。
学号U200912039专业班号电气0910姓名刘浩田指导教师杨凯日期2011年12月30日报告成绩一、设计题目一台绕线式异步电动机,Y/y 连接,已知数据为:额定功率P N =120kW ,f = 50 Hz ,2p =4,U n = 380 V ,n N = 1440r/min ,R 1 =0.02Ω,R 2 ‘=0.04 Ω,x 1σ = x 2σ’=0.06Ω,x m = 3.6Ω,k i = k e = 0.02,忽略铁耗。
试求:若维持转轴上的负载为额定转矩,使转速下降到1000 r/min ,采用转子绕组串电阻调速,计算电阻及其它参数,做出机械特性图,分析能量的传递。
用Matlab 中的SIMULINK 设计调速仿真模型(其余仿真参数可自行设定),并仿真调速前后定子电流与转子转速波形。
二、设计过程1.原理描述交流电动机调速的主要理论依据是: ()()160fn n 1s p 1s =-=-式中: f : 电源频率P : 电动机的极对致s :转差率要实现调速主要就是通过改变上述三个参量f 、p 、s ,本次设计要阐述的串电阻调速属于改变转差率调速中的一种。
该方案主要原理就是在电动机转子侧串接不同阻值的电阻,使得电动机运行在不同的给定特性曲线上(如下图1)。
其主要优缺点在于:1 .对电网的容量、电压波动等要求不高;2 .起动特性较好,可以控制起动电流,但不影响起动转矩;3 .控制方案简便易行,系统造价较低,前期投入小;4 .有级调速。
电阻设计一旦确定,则速度档不易改变;5 .低速时,机械特性较软。
转速受转矩变化影响很大,效率较低。
图1 绕线式异步电动机转子串电阻调速的机械特性2.参数计算绕线式异步电动机T形等效电路如下图2绕线式异步电动机T 形等效电路图转子电感 1110.060.0001912100s x L H f σππ=== 定子电感 ''2110.060.0001912100r x L H f σππ===励磁电感 1 3.60.01152100m m x L H f ππ=== 额定负载转矩 N n N P 120000T 795.8m 2n 214406060N ππ===⋅⨯同步转速 0160/6050/21500/min n f p r ==⨯= 额定转差率 N 15001440s 0.041500-==调速前的电磁转矩 '2211em '2'221112R m pUs T R2f [(R )(X X )]sσσπ==+++876.3N m ⋅ 调速后的转差 1150010001s 15003-==要求为恒转矩调速,则有:''22N 1R R R s s Ω+=由上式可得 'R 0.29Ω=Ω转子串电阻过程中,只要负载转矩不变,电机的定、转子电流也不变,在串电阻调速过程中,电机电流均为额定电流。
电机学第六版课程设计一、设计背景电机是现代工业中广泛使用的一种能量转换设备,应用于各种机械设备、交通运输工具、家用电器等领域。
因此,电机学是电气工程学科中的重要基础课程。
为了更好的培养电机学相关专业的学生,深入了解电机的原理和应用,在电机学第六版课程教学中,设计了一系列基于实例应用的课程设计。
二、设计目标本次课程设计旨在通过具体的案例应用,帮助学生深入理解电机的工作原理,掌握电机的基本参数和常见故障的排查方法。
同时,本次课程设计也要求学生掌握电机选型和控制方法,提高解决实际问题的能力。
三、设计内容1.了解电机的基本原理和分类在本设计中,学生需要通过阅读电机学第六版相关章节的教材资料,了解电机的基本原理和分类。
学生需要掌握电机转子和定子的结构、磁场的作用和变化规律、电机的分类和常见应用等方面的基本知识。
2.仿真分析电机的运行状态课程设计中,将学生要求结合实际案例,利用MATLAB等电力仿真软件,分析电机在不同工况下的运行状态,包括空载和带载运行状态,以及启动、制动、反转等操作过程中的电机电流、电磁力、转速等关键参数。
3.掌握电机的控制方法通过实验室实际操作和仿真分析,学生需要掌握开关式变频器的控制方法,能够根据不同的应用情况,选择合适的控制方式(如V/F控制、矢量控制等)控制电机运行。
4.解决电机常见故障在实验室操作中,学生将会接收到电机常见故障信息(如过热、断电、堵转等情况),并且需要采取相应措施解决这些问题。
这样,学生们不仅可以加深对电机的理解,还可以提高解决实际问题的能力。
四、学生要求•具备电工电子等相关专业基本知识•掌握C/C++编程或MATLAB/Simulink软件的应用基础知识•勤奋刻苦,耐心细致,积极进取五、课程设计效果经过本次课程设计,学生将会对电机的原理和应用有一个全面的认识,掌握电机的基本参数和控制方法,可以更好的应用电机于实际生产实践。
同时,增强了学生解决实际问题的能力和创新精神,为学生今后的实践工作打下了坚实的基础。

电气与电子工程学院《电机学》课程设计设计题目异步电动机的调速与仿真指导老师杨凯班级电气1201班姓名H X学号U2012XXXXX完成日期2015 年 3 月 2 日目录一、课程设计题目 (3)二、设计过程与结果 (4)异步电动机调速基本原理: (4)条件中的参数计算: (4)任务一: (5)任务二: (9)任务三: (13)用SIMULINK设计调压调速仿真模型 (21)误差分析: (28)三、实验总结 (29)四、参考文献 (30)一、课程设计题目一台绕线式异步电动机,Y/y连接,已知数据为:额定功率P N = c0 kW,f = 50 Hz,2 p = c1,U n = 380 V,n N = c2 r/min,R1 = R2' = 4Ω,x1σ = x2σ'= 6Ω,x m = 120Ω,k i = k e = 0.02,忽略铁耗。
各参数为:c0 =1.1c1 =4c2 =1440c6 =500任务要求:①若维持转轴上的负载为额定转矩,使转速下降到c6r/min,采用调压调速方式并计算其参数,做出机械特性图,分析能量的传递。
②若维持转轴上的负载为额定转矩,使转速下降到c6 r/min,采用变频调速方式并计算其参数,做出机械特性图,分析能量的传递。
③若维持转轴上的负载为额定转矩,使转速下降到c6r/min,要求最大转矩不超过1.5 T n,采用转子绕组串电阻调速,计算其级数及其它参数,做出机械特性图,分析能量的传递。
④用Matlab中的SIMULINK设计调压调速仿真模型(其余仿真参数可自行设定) ,并仿真调速前后定子电流与转子转速波形。
⑤对仿真结果和计算结果进行分析。
二 、设计过程与结果异步电动机调速基本原理:根据异步电机的转速公式:n =(1−s )n 1=60f 1p(1−s) 异步电动机的调速方式有以下三种: (1) 变极调速,即改变极对数2 p 调速; (2) 变频调速,即改变频率f 1调速;(3) 改变转差率s 调速,题目中的变压调速与转子绕组串电阻调速都属于改变转差率调速。
第1章 导论1.1 电机和变压器的磁路常采用什么材料制成?这些材料各有哪些主要特性? 解:磁路:硅钢片。
特点:导磁率高。
电路:紫铜线。
特点:导电性能好,电阻损耗小. 电机:热轧硅钢片, 永磁材料 铁氧体 稀土钴 钕铁硼 变压器:冷轧硅钢片。
1.2 磁滞损耗和涡流损耗是什么原因引起的?它们的大小与哪些因素有关?解:磁滞损耗:铁磁材料在交变磁场作用下反复磁化,磁畴会不停转动,相互间产生摩擦,消耗能量,产生功率损耗。
与磁场交变频率f ,磁通密度B ,材料,体积,厚度有关。
涡流损耗:由电磁感应定律,硅钢片中有围绕磁通呈涡旋状的感应电动势和电流产生叫涡流,涡流在其流通路径上的等效电阻中产生的损耗叫涡流损耗。
与磁场交变频率f ,磁通密度,材料,体积,厚度有关。
1.3 变压器电动势、运动电动势产生的原因有什么不同?其大小与哪些因素有关? 解:变压器电势:磁通随时间变化而在线圈中产生的感应电动势 4.44m EfN φ=。
运动电势:线圈与磁场间的相对运动而产生的e T 与磁密B ,运动速度v ,导体长度l ,匝数N 有关。
1.6自感系数的大小与哪些因素有关?有两个匝数相等的线圈,一个绕在闭合铁心上,一个绕在木质材料上,哪一个自感系数大?哪一个自感系数是常数?哪一个自感系数是变数,随什么原因变化?解:自感电势:由于电流本身随时间变化而在线圈内感应的电势叫自感电势。
d Le dt Lψ=- 对空心线圈:L Li ψ= 所以die L L dt=-自感:2L L N N m m iiiLNi N φψ===∧=∧ Am l μ∧=所以,L 的大小与匝数平方、磁导率µ、磁路截面积A 、磁路平均长度l 有关。
闭合铁心µ>>µ0,所以闭合铁心的自感系数远大于木质材料。
因为µ0是常数,所以木质材料的自感系数是常数,铁心材料的自感系数是随磁通密度而变化。
1.7 在图1.30中,若一次绕组外加正弦电压u 1、绕组电阻R 1、电流i 1时,问 (1)绕组内为什么会感应出电动势?(2)标出磁通、一次绕组的自感电动势、二次绕组的互感电动势的正方向; (3)写出一次侧电压平衡方程式;(4)当电流i 1增加或减小时,分别标出两侧绕组的感应电动势的实际方向。
电机学的课程设计一、课程目标知识目标:1. 学生能够理解并掌握电机的基本结构、工作原理及分类。
2. 学生能够描述并解释电机在不同应用领域的功能及作用。
3. 学生能够掌握电机的主要性能参数,并运用相关公式进行计算。
技能目标:1. 学生能够运用电机学知识,分析并解决实际电路中电机相关问题。
2. 学生能够正确使用实验仪器,进行电机性能测试,并处理实验数据。
3. 学生能够设计简单的电机控制系统,实现电机的启动、停止和调速。
情感态度价值观目标:1. 学生通过学习电机学,培养对物理学科的热爱和兴趣,增强探究精神。
2. 学生能够认识到电机在日常生活和国家发展中的重要作用,提高社会责任感和使命感。
3. 学生通过合作学习,培养团队协作能力和沟通交流能力,形成积极向上、互帮互助的学习氛围。
课程性质:本课程为电机学基础知识课程,旨在帮助学生建立电机学的基本概念,提高解决实际问题的能力。
学生特点:初三学生具备一定的物理基础知识,具有较强的求知欲和动手能力。
教学要求:结合学生特点,采用讲解、实验、讨论等多种教学方法,注重理论联系实际,提高学生的知识运用能力。
在教学过程中,关注学生的个体差异,鼓励学生积极参与,充分调动学生的学习积极性。
通过本课程的学习,使学生能够达到上述课程目标,为后续学习打下坚实基础。
二、教学内容1. 电机的基本概念:介绍电机的定义、分类及用途,重点讲解电机在日常生活和工业中的应用。
教材章节:第一章 电机概述2. 电机的工作原理:详细讲解电机的工作原理,包括电磁感应、电磁力等基本概念。
教材章节:第二章 电机的工作原理3. 电机结构及参数:介绍电机的主要结构,如定子、转子、绕组等,以及电机的主要性能参数。
教材章节:第三章 电机结构及参数4. 电机启动、运行和调速:讲解电机的启动方法、运行特性及调速原理。
教材章节:第四章 电机启动、运行与调速5. 电机应用实例:分析电机在不同领域的应用,如家用电器、工业生产等。
第三章直流电机的稳态分析主要内容:研究直流电机的稳态运行,对直流电机的工作原理、结构、电路、磁路及运行原理和换向问题加以分析,并对直流电机的启动、调速和制动进行了分析。
3-1直流电机的工作原理和基本结构电机是由两大部分组成1、静止部分——定子2、旋转部分——转子一、直流电机的静止部分(定子)1、主磁极主磁通的作用是建立主磁场。
主磁极由主极铁心和套装在铁心上的励磁绕组组成它的,铁心是由1~1.5mm厚的钢板冲片叠压紧固而成。
极靴的作用是使主磁通在过气隙时分布的更合理并且固定励磁绕组。
2、机座其作用一是作为磁路的一部分,二是固定主极,换向极和端盖。
通常是用铸钢或厚钢板焊成,机座中有磁通通过的部分称为磁轭。
3、换向极换向极装在两极之间。
其作用是用来改善换向,也是由铁心和绕组组成,换向极绕组与电枢绕组串联。
4、电刷装置电刷装置是电枢电路的引入(或引出)装置,通过它可以把电机旋转部分的电流引出到静止的电路里,它与换向器配合才能使电机获得直流电机的效果。
二、直流电机的转动部分1、电枢铁心电枢铁心即是主磁路的组成部分,又是电枢部分绕组的支撑部件.为减少电枢铁心内的涡流损耗,铁心一般采用0.5mm厚的DR530或DR510的硅钢片叠压而成.2、电枢绕组.电枢绕组叠放在电枢铁心的槽内,是由按一定规律联接的线圈组成.它是直流电机的电路部分.上、下层之间及线圈与铁心之间都要有绝缘,槽口处用槽楔压紧.3、换向器换向器也是直流电机的重要部件,在发电机中可将电枢绕组中交变的电流转换成电刷上的直流,起整流作用,而在直流电动机中将电刷上的直流变为电枢绕组内的交流,即起逆变作用。
换向器由许多换向片组成,片间用云母绝缘,电枢绕组的每个线圈的两端分别接到两个换向片上.三、电流电机的工作原理1、直流电动机的工作原理我们首先分析一个简单的物理模型,图中N.S是一对磁铁,它可以是永久磁铁,也可以为电磁铁,所谓电磁铁就是在磁极铁心上绕上励磁线圈且通入直流,便产生固定的极性。
2010 级《电机学》课程设计组员张丰伟、彭永晶彭鸿昌、邱天、李彦青所在院系电气与电子工程班级电气1004班日期 2013年3月作业评分评阅人一、设计题目题目:铁心磁路计算铁心磁路如图所示,磁路尺寸为:1δ=3mm 、2δ=2mm 、w=125mm 、h=150mm 、N 1=2N 2=100匝,铁芯宽度l=50mm 、铁心厚度d=50mm 。
铁芯宽度和厚度均匀,忽略铁芯磁场边缘效应。
1.假设铁芯的磁导率为无穷大,(1)若I 2=0,Φ1=6mWb ,求I 1(2)若I 1=10A ,I 2=20A ,求Φ1和Φ2。
2.若铁芯材料为DR510钢片(磁化曲线见教材),若I 2=0,Φ1=6mWb ,求I 1和Φ1。
3.若I 1=10A ,I 2=20A ,编写程序,求Φ1和Φ2。
二、设计过程由磁路基尔霍夫第一定律∑φ=0,可得213φφφ-=,由于铁芯宽度和厚度均匀,截面积相等,则321B B B -=由磁路基尔霍夫第二定律∑∑∑∑===m R Hl Ni F φ,得:[]()[]()⎪⎪⎩⎪⎪⎨⎧+-+-++=-+++-++=⋅⋅l h H B l h w H I N l h H B l h w H I N 30222222301111113232μμδδδδ磁场关系:H B μ= 则方程为:[]()[]()⎪⎪⎪⎩⎪⎪⎪⎨⎧=-=+-+-++=-+++-++=⋅⋅i Fe i H B B B B l h H B l h w H I N l h H B l h w H I N μμμ21330222222301111113232δδδδ1.假设铁芯的磁导率为无穷大,(1)若I 2=0,Φ1=6mWb ,求I 1(2)若I 1=10A ,I 2=20A ,求Φ1和Φ。
铁芯的磁导率为无穷大,则铁芯磁路H=0,方程化简为⎪⎪⎩⎪⎪⎨⎧=-=022*******μμδδB I N B I N (1)将I 2=0,Φ1=6mWb 带入上式方程,得I 1=57.2958A(2)将I 1=10A ,I 2=20A 带入上式方程,得B 1=0.418879T ,B 2=-0.628319T ,则Φ1=B 1ld=1.04720mWb ,Φ2=B 2ld=-1.57080mWb2.若铁芯材料为DR510钢片(磁化曲线见教材),若I 2=0,Φ1=6mWb ,求I 1和Φ1。
学号U200912039
专业班号电气0910
姓名刘浩田
指导教师杨凯
日期2011年12月30日报告成绩
一、设计题目
一台绕线式异步电动机,Y/y 连接,已知数据为:额定功率P N =
120kW ,f = 50 Hz ,2p =4,U n = 380 V ,n N = 1440r/min ,R 1 =0.02Ω,
R 2 ‘=0.04 Ω,x 1σ = x 2σ’=0.06Ω,x m = 3.6Ω,k i = k e = 0.02,忽略铁耗。
试求:
若维持转轴上的负载为额定转矩,使转速下降到1000 r/min ,采用转子绕组串电阻调速,计算电阻及其它参数,做出机械特性图,分析能量的传递。
用Matlab 中的SIMULINK 设计调速仿真模型(其余仿真参数可自行设定),并仿真调速前后定子电流与转子转速波形。
二、设计过程
1.原理描述
交流电动机调速的主要理论依据是: ()()
160f
n n 1s p 1s =-=-
式中: f : 电源频率
P : 电动机的极对致
s :转差率
要实现调速主要就是通过改变上述三个参量f 、p 、s ,本次设计要阐述的串电阻调速属于改变转差率调速中的一种。
该方案主要原理就是在电动机转子侧串接不同阻值的电阻,使得电动机运行在不同的给定特性曲线上(如下图1)。
其主要优缺点在于:
1 .对电网的容量、电压波动等要求不高;
2 .起动特性较好,可以控制起动电流,但不影响起动转矩;
3 .控制方案简便易行,系统造价较低,前期投入小;
4 .有级调速。
电阻设计一旦确定,则速度档不易改变;
5 .低速时,机械特性较软。
转速受转矩变化影响很大,效率较低。
图1 绕线式异步电动机转子串电阻调速的机械特性
2.参数计算
绕线式异步电动机T形等效电路如下
图2绕线式异步电动机T 形等效电路图
转子电感 1110.06
0.0001912100s x L H f σππ
=
== 定子电感 ''
2110.06
0.0001912100r x L H f σππ
===
励磁电感 1 3.6
0.01152100m m x L H f ππ
=== 额定负载转矩 N n N P 120000
T 795.8m 2n 21440
6060
N ππ=
==⋅⨯
同步转速 0160/6050/21500/min n f p r ==⨯= 额定转差率 N 15001440
s 0.041500
-=
=
调速前的电磁转矩 '
2211
em '
2'221112R m pU
s T R
2f [(R )(X X )]
s
σσπ==+++876.3N m ⋅ 调速后的转差 1150010001
s 15003
-==
要求为恒转矩调速,则有:
''22N 1
R R R s s Ω
+=
由上式可得 'R 0.29Ω=Ω
转子串电阻过程中,只要负载转矩不变,电机的定、转子电流也不变,在串电阻调速过程中,电机电流均为额定电流。
转子电流:
2
210.14
I A
'===;
'
60.11
I A
===
定子电流:''
102
218.56 5.536
I I I A
=+=∠-。
3.机械特性图
下面用matlab画出其机械特性图:
编程如下:
>> s=0.01:0.01:0.99;
>> p=2;m1=3;
>> u=380/sqrt(3);
>> f=50;
>> R1=0.02;
>> R2=0.04;
>> X1=0.06;
>> X2=0.06;
>> Tem=p.*m1.*u.^2.*R2./s./2./pi./f./((R1+R2./s).^2+(X1+X2).^2);
>> plot(Tem,s);
>> ylabel('转差率s');
>> xlabel('电磁转矩Tem/N*m');
>> Tem1=p.*m1.*u.^2.*(R2+0.29)./s./2./pi./f1./((R1+(R2+0.29)./s).^2+((X1+X2)).^2);
>> hold on;
>> legend('调速前','调速后');
图3 调速前后的机械特性
4.能量传递分析:
调速前的电磁功率 02/60132.1em em P T n kW π=⨯= 损耗为 132.112012.1p kW ∆=-= 调速后电磁功率不变,输出功率
212/60795.821000/6083.34N P T n kW ππ=⨯=⨯⨯= 调速后损耗 '132.183.3448.76p kW ∆=-=
下面分析损耗去向:
调速前:
定子铜耗: 2
1111 5.73cu m I R kW p ==
转子铜耗: 2221223*210.14*0.04 5.3Cu P m I R kW ''=== 电磁功率: 132.1emN P kW =;
500
1000
1500
200025003000
3500
4000
00.10.20.30.40.50.60.70.80.91转差率s
电磁转矩T em/N*m
总机械功率:(1)0.96*132.1126.8mec emN P s P kW =-==;
忽略铁耗,总输入功率:11 5.73132.1137.83Cu emN P P P kW =+=+=; 空载损耗: 02126.8120 6.8mec ad mec N P p p P P kW =+=-=-= 调速后:2I '、'0I 、定子电流、定子铜耗、电磁功率都不变 定子铜耗不变: 2
1111 5.73cu m I R kW p ==
电磁功率不变:132.1emN P kW =;
转子铜耗增加:21132.144.033
Cu emN P s P kW =⋅=⨯=; 总机械功率减少:2(1)*132.188.073
mec emN P s P kW =-==; 忽略铁耗,总输入功率不变:11137.83Cu emN P P P kW =+=; 空载损耗减少:0288.0783.34 4.73mec ad mecN P p p P P kW =+=-=-=
转子串电阻调速,由于等效电路不变,从定子传送到转子的电磁
功率不变,但机械功率m P 和铜耗2Cu P 却发生了变化: 2(1)em mec Cu em em P P P s P sP =+=-+
转速越低时s 越大,那么机械功率部分m P 变小,而转子铜耗2Cu P 增大。
所以这种调速方法在低速运行时,损耗大,效率低,不宜长期运行。
5.Simulink 仿真:
图3 绕线式异步电机串电阻调速模型 图中封装模块为
图4 绕线式异步电机串电阻调速模型图中封装模块为
图5封装模块图
电机参数设置如下
图6 电机参数设置
仿真后示波器结果为:
图7 仿真结果
从上到下,依次为转子电流、定子电流、转速、转矩em T的波形图。
放大图如下:
图8 转子电流和定子电流放大图
我们可以从上图8得到0.5280198*2r A A I ≈≈, 0.5300212.2*2s A I ≈≈A
图9转速和转矩放大图
从上图可知,在t=1.0s 时,转速从1440r/min 下降到1020r/min , 转矩em T 保持在801N*m 。
6.结果
由仿真结果可知,转子串入电阻后,转速从1440r/min下降到1020r/min,转子电流先变小再增大,周期变小,频率升高;定子电流大小不变,频率不变;电磁转矩先下降再上升,稳定在原电磁转矩大小,实现恒转矩调速。
三、设计总结
本次设计采用绕线式异步电动机转子电路外串电阻的调速方法,不可否认,其在运输起重机械、冶金机械和鼓风机等场合有很广泛的应用,这种调速方法具有调速线路简单, 初投资小的优点,但其一个很大的缺点是经济性不高,转子外串电阻的能耗大, 转速越低,外串电阻的数值就越大, 电机效率也越低。
如果能够找到降低能耗的方法其应
用必将更广泛。
这次课程设计距上电机课过了一个寒假,如果没有这次课程设计,所学的电机知识可能很快就会忘掉很多。
通过做这个课程设计,课本知识得以巩固和加强,我对绕线式异步电动机的调速方法、异步电动机的能量传递了解进一步加深。
在做这个设计中,由于要用Simulink 仿真,对matlab中各元器件的名称不是很熟,得到了其他同学的帮助,在这里,非常感谢老师和同学的帮助!
参考文献:
(1)电机学/辜承林陈乔夫熊永前编/华中科技大学出版社/ 2005
(2) MATLAB电机仿真精华50例/ 潘晓晟,郝世勇编/ 电子工业出版社/ 2007。