机电一体化大作业设计说明书
- 格式:doc
- 大小:283.50 KB
- 文档页数:9

机电工程学院课程设计(专业方向设计)说明书(2014 /2015 学年第一学期)课程名称:机电一体化课程设计题目:工业机械手设计专业班级:学生姓名:学号:指导教师:设计周数:三周设计成绩:2015年12月31日目录第一章工业机械手综述.......................................... 错误!未定义书签。
工业机械手的发展概况...................................... 错误!未定义书签。
工业机械手的应用.......................................... 错误!未定义书签。
工业机械手的组成及原理.................................... 错误!未定义书签。
第二章伸缩臂的设计方案 . (4)设计方案论证以及确定 (4)设计参数及要求 (4)设计方案的比较论证..................................... 错误!未定义书签。
机械手伸缩臂总体结构设计方案 (4)执行装置的设计方案 (5)滚珠丝杠的选择 (5)减速齿轮的有关计算...................................... 错误!未定义书签。
电动机的选择............................................ 错误!未定义书签。
第三章 PLC控制系统设计...................................... 错误!未定义书签。
PLC的构成及工作原理..................................... 错误!未定义书签。
选择PLC ................................................. 错误!未定义书签。
PLC外部I/O分配图....................................... 错误!未定义书签。
机电一体化大作业便携式折叠电动车设计说明书农机一班第六小组成员:潘江20126901吴正凯20121100张韬20126906刘威20121098许沛东20126897目录一、前言 (1)二、部分国家标准 (1)三、外形设计 (3)四、折叠机构 (4)五、尺寸设计 (5)六、动力部分 (6)七、电路设计 (6)八、结语 (7)一、前言随着经济发展,节能与环保已经成为人们生活中不可缺少的一环,现在折叠自行车以及电动车已在日常生活中得到广泛使用。
虽然折叠自行车方便携带,但远不及电动车快捷,但电动车的缺点则是体积较大,在要换乘其他交通时会比较麻烦。
如果把电动车做成可折叠的,那既能集合两者优点,还可起到防盗的作用。
近年来国内外都有针对该问题的研究,并有一些折叠电动自行车已经投入生产和使用,但是经过我们的调研,市场上现存的折叠电动自行车折叠方式单一,基本上都是在中轴部位前后对折,折叠后形状很不规则,携带困难;也有一些产品,折叠后形状较为规则,但是折叠过程繁琐,且价格昂贵,不适合现在中国现在的消费群体。
在此基础上,我们团队设计了一款可折叠的便携式电动车,结构简单,折叠方便,同时在考虑安全性、实用性的基础上尽可能地降低成本,以满足大部分人的需求。
二、部分国家标准根据电动自行车通用技术条件(GB17761-1999),罗列部分电动车技术要求,为更进一步设计打好基础。
5.1 整车主要技术性能要求5.1.1 最高车速电动自行车最高车速应不大于20k m/h.5.1.2 整车质量(重量)电动自行车的整车质量(重量)应不大于40k g,5.1.3 脚踏行驶能力电动自行车必须具有良好的脚踏骑行功能,30m in的脚踏行驶距离应不小于7k m,5.1.4 续行里程电动自行车一次充电后的续行里程应不小于25k m,5.1.5 最大骑行噪声电动自行车以最高车速作电动匀速骑行时(电助动的以1 5k m/h-18k m/h速度电助动骑行)的噪声应不大于62 dB(A)。
机电一体化专业自考学生毕业设计任务书(一)一、设计任务:1. 完成系统的方案设计、参数设计、元件选择、绘系统工作原理图。
(包括元件明细表及测点置)2. 设计电气程序控制系统,绘方框图及电控系统原理图,PLC 控制编程。
3. 绘制液压缸结构图。
4. 编写设计计算(论文)书。
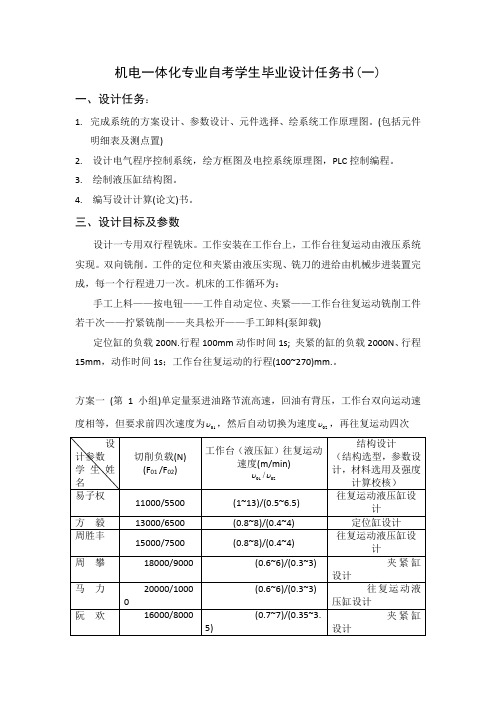
三、设计目标及参数设计一专用双行程铣床。
工作安装在工作台上,工作台往复运动由液压系统实现。
双向铣削。
工件的定位和夹紧由液压实现、铣刀的进给由机械步进装置完成,每一个行程进刀一次。
机床的工作循环为:手工上料——按电钮——工件自动定位、夹紧——工作台往复运动铣削工件若干次——拧紧铣削——夹具松开——手工卸料(泵卸载)定位缸的负载200N.行程100mm 动作时间1s; 夹紧的缸的负载2000N 、行程15mm ,动作时间1s ;工作台往复运动的行程(100~270)mm.。
方案一 (第1小组)单定量泵进油路节流高速,回油有背压,工作台双向运动速度相等,但要求前四次速度为01υ,然后自动切换为速度02υ,再往复运动四次四、分析思考题1. 若工作台要求往复运动的速度相等,有哪些方案可供选择?实验装置如何实现?2. 如何定义液压系统的回路效率?试分析计算不同负载下的回路效率。
3. 在工作台不工作时,如何实现系统的卸载?4. 系统中溢流阀有何作用?如何确定它的调定压力?若偏离此调定压力,会出现什么后果?5. 如何调节限压式变量泵的最大流量及最高限定压力?6. 何谓节流阀的临界开口?定量泵节流调速方案如何在实验中确定临界开口值?参考资料1.李壮云葛宜远主编《液压元件与系统》机械工业出版社2.许福玲陈尧明主编《液压与气压传动》机械工业出版社3.液压系统设计简明手册杨培元朱福元主编机械工业出版社4.机械零件设计手册续编冶金工业出版社或机械设计手册第五卷机械工业出版社5. 《液压传动设计手册》上海煤矿机械研究所上海人民出版社机电一体化专业自考学生毕业设计任务书(二)一、设计任务:完成系统的方案设计、参数设计、元件选择、绘系统工作原理图。

《机电一体化系统设计课程设计》设计说明书一、课程设计的目的机电一体化系统设计是一门综合性很强的课程,通过本次课程设计,旨在让我们将所学的机电一体化相关知识进行综合运用,培养我们独立设计和解决实际问题的能力。
具体来说,课程设计的目的包括以下几个方面:1、加深对机电一体化系统概念的理解,掌握系统设计的基本方法和步骤。
2、熟悉机械、电子、控制等多个领域的知识在机电一体化系统中的融合与应用。
3、培养我们的工程实践能力,包括方案设计、图纸绘制、参数计算、器件选型等。
4、提高我们的创新思维和团队协作能力,为今后从事相关工作打下坚实的基础。
二、课程设计的任务和要求本次课程设计的任务是设计一个具有特定功能的机电一体化系统,具体要求如下:1、确定系统的功能和性能指标,包括运动方式、精度要求、速度范围等。
2、进行系统的总体方案设计,包括机械结构、驱动系统、控制系统等的选择和布局。
3、完成机械结构的详细设计,绘制装配图和零件图。
4、选择合适的驱动电机、传感器、控制器等器件,并进行参数计算和选型。
5、设计控制系统的硬件电路和软件程序,实现系统的控制功能。
6、对设计的系统进行性能分析和优化,确保满足设计要求。
三、系统方案设计1、功能需求分析经过对任务要求的仔细研究,确定本次设计的机电一体化系统为一个小型物料搬运机器人。
该机器人能够在规定的工作空间内自主移动,抓取和搬运一定重量的物料,并放置到指定位置。
2、总体方案设计(1)机械结构采用轮式移动平台,通过直流电机驱动轮子实现机器人的移动。
机械手臂采用关节式结构,由三个自由度组成,分别实现手臂的伸缩、升降和旋转,通过舵机进行驱动。
抓取机构采用气动夹爪,通过气缸控制夹爪的开合。
(2)驱动系统移动平台的驱动电机选择直流无刷电机,通过减速器与轮子连接,以提供足够的扭矩和速度。
机械手臂的关节驱动选择舵机,舵机具有控制精度高、响应速度快等优点。
抓取机构的气缸由气泵提供气源,通过电磁阀控制气缸的动作。

机电一体化课程设计说明书机电一体化是现代制造业的重要组成部分,其涉及到机械工程、电气工程、计算机技术、控制工程等多个学科领域。
为了培养适应现代制造业需求的高素质人才,不少高校开设了机电一体化课程,而机电一体化课程设计则是学生在课程学习中的一项重要内容。
一、目的与意义机电一体化课程设计的目的是为了让学生在理论学习的基础上,通过实践掌握机电一体化原理、设计方法和实践技能,并培养解决实际问题的能力。
课程设计能够促进学生综合运用所学知识,掌握设计和制造的技能,提高科学研究和工程实践的水平。
二、设计内容机电一体化课程设计的内容主要包括以下几个方面:1.课程设计的选题选题的过程需要从市场需求、生产实际等方面进行全面考虑,将理论与实际相结合,确保课程设计的实用性和先进性。
学生可以从课程学习的重点内容或自己感兴趣的领域中选择选题。
2.课程设计方案的制定制定课程设计方案是课程设计的关键,应包括课程设计的目的、任务、具体步骤和实验条件等内容,同时还需要对项目分工和时间进度进行规划和安排。
3.实行课程设计方案课程设计的实施需要学生掌握一定的技能,包括制图、计算、加工及调试等技能。
学生应严格按照课程设计方案,展开实验与制作。
4.试验结果的分析和评价课程设计完成后,需要对试验结果进行全面评价。
学生要认真分析实验中的问题,总结出有关经验,发现不足之处并对试验结果加以评价。
三、设计要求与注意事项课程设计是提高学生综合素质、实践能力和创新能力的重要途径,需要具备以下要求:1.选题合理。
选题应符合实际需求,并能使学生深入了解机电一体化学科领域的主要问题和发展趋势。
2.方案制定合理。
制定方案时应注意前后任务之间的时间差,确定完成任务的能力和实践经验,保证制定的方案语言通俗易懂,可行性高。
3.实验准确和系统。
实验应尽量准确地进行,注意实验的规范、安全、环保、效率等问题,在进行实验的同时要注意记录数据,方便后期数据分析等。
四、总结机电一体化课程设计是机电一体化课程学习中的一个重要环节,对学生的综合素质和实践能力的提高具有重要意义。


机电一体化专业毕业设计说明书的编写说明一、毕业设计说明书的基本构成和要求一篇完整的毕业论文(设计说明书)通常由目次、题名、摘要、关键词、前言、正文、结论、致谢、参考文献和附录等几部分构成。
1、目次由毕业设计说明书各部分内容的顺序号、名称和页码组成。
2、题名课题名称。
题名中不能使用非规范的缩略词、符号、代号和公式。
3、摘要应扼要叙述本设计研究工作的主要内容、方法、观点和成果,要求文字简练、准确。
摘要约200字左右。
4、关键词关键词的个数为3-5个。
关键词后面不加冒号,关键词与关键词之间应留出一个汉字的空间,不加任何标点符号。
5、前言应说明本设计的目的和意义、本课题要研究的主要问题,研究(设计)的思路、方法等。
6、正文论文的正文是作者对本课题研究内容全面详细的表述,是论文的核心部分,它占全文的较大篇幅。
设计说明书的正文应包括设计方案论证部分、计算部分、设计部分、实验部分(实验方法、线路及数据处理及安装调试等)等。
7、结论应对本设计进行归纳和综合,说明优缺点,改进方案等,得出准确、完整、精练的结论。
8、致谢以简炼的文字对指导教师和支持、协助完成论文(设计)的有关人员表示谢意。
9、参考文献参考文献是毕业论文(设计说明书)不可缺少的组成部分。
它反映毕业设计的取材来源、材料的广博程度。
引用参考文献时,应注意写法的规范性。
10、附录将各种篇幅较大的图纸、数据表格、计算机程序等附于论文或说明书之后。
二、毕业设计说明书的正文编写提纲1、确定传动方案1.1方案简图1.2方案特点2、选择电动机2.1电动机功率确定2.2电动机转速确定2.3选择电动机的类型和结构型式3、传动比计算3.1计算传动装置总传动比3.2各级传动比分配4、传动装置运动和动力参数计算4.1各轴转速4.2各轴功率4.3各轴转矩5、传动零件设计计算5.1带传动设计计算5.1.1带型号、根数、长度及中心距5.1.2带轮直径、宽度及结构5.2齿轮参数设计计算5.2.1齿轮材料及热处理选定5.2.2齿轮各极限应力查取5.2.3齿轮模数、齿数、齿宽设计计算5.2.4齿轮结构设计5.3联轴器的选择6、轴的设计计算6.1建受力模型,确定各轴的作用载菏6.2按扭矩验证最小轴径6.3轴的结构简图设计6.4轴颈支反力计算6.5绘弯矩图6.6轴弯扭强度校核7、滚动轴承选择和校核计算﹙轴工艺设计不做7、8、9内容,改写工艺内容﹚﹙7、轴工艺设计7.1轴的结构与技术要求分析7.1.1轴的结构及特点7.1.2轴的技术要求分析7.2轴的毛坯选择7.2.1毛坯选择考虑的因素〈参机械制造工艺设计简明手册P8〉7.2.2轴的毛坯图〈参机械制造工艺设计简明手册P60~61〉7.3轴加工定位基准的选择7.3.1粗定位基准的选择7.3.2精定位基准的选择7.4轴加工工艺设备的选择7.4.1机床型号的确定7.4.2机床工装的选择〈夹具、刀具、量具〉〈参机械制造工艺设计简明手册P77~81〉7.5热处理工序的安排7.6轴加工工艺流程〈列表〉〈工序间加工余量参机械制造工艺设计简明手册P62~63〉﹚8、键的选择和校核计算﹙轴工艺设计不做﹚9、润滑设计﹙轴工艺设计不做﹚9.1润滑方式的选择9.2密封件的选择9.3润滑油的牌号及装油量计算10、传动装置控制系统设计10.1控制方案的选择与比较10.2主电路设计10.2.1主电路原理图10.2.2主电路原理图说明10.3控制电路设计10.3.1控制电路原理图10.3.2控制电路原理图说明10.3.3控制电路中的保护设计10.4电器元件目录三、毕业设计说明书的装订顺序毕业设计说明书单独装订成册,使用封面由教务处统一制作。

第一章课题背景一、机电一体化在工程机械中应用机电一体化是当今自动化技术发展的最高阶段。
早期的自动化技术主要是借助凸轮、机械机构等实现的,这一时期的自动化实际上是机械自动化;随着电子技术的发展,凸轮、机械机构逐渐被继电器、接触器、电磁开关等机构所取代,实现了电气自动化,机械机构大大简化,自动化水平大为提高;机电一体化则是生产实践对自动化技术进一步发展的需要,也是微电子技术、计算机技术、信息技术、控制技术和精密机械技术等发展的必然产物,是以计算机为主要特征的自动化技术。
如果说机械系统处理的对象是运动、力、物质和能量,电子系统处理的对象是信息和知识,则机电一体化系统不仅有处理能量和物质的功能,而且还有处理信息和知识的能力。
机电一体化技术发展至今已成为一门有着自身体系的新型学科,其发展历程可分为4个阶段:①数控机床的问世是机电一体化发展的开始;②微电子技术为机电一体化带来勃勃生机;③可编程序控制器的发展为机电一体化提供了坚强基础;④激光技术、模糊技术、信息技术使机电一体化跃上新台阶【1】。
机电一体化技术的发展初期,人们的目的是利用电子技术的初步成果来完善机械产品的性能,那时研制和开发还处于萌芽状态,而且由于当时电子技术水平不高,机械技术与电子技术的结合还不广泛和深入。
其后计算机技术、控制技术、通信技术、大规模集成电路的发展,为机电一体化的发展奠定了技术和物质基础。
二、PLC的应用与发展而随着电子科技的发展及产业应用的需要,PLC的功能也日益强大,例如位置控制及网络功能等,输出输入信号也包含了DI (Digital Input)、AI (Analog Input)、PI (Pulse Input)及NI (Numerical Input),DO (Digital Output)、AO (Analog Output)、PO (Pulse Output)及NO (Numerical Output),因此PLC在未来的工业控制中,仍将扮演举足轻重的角色。

三自由度平动机械手工作台机电系统设计科目:机电一体化班级:机械工程五班成员:罗欣201325070530卢国文201325070501赵效鲁201325070509贾静然201325070502目录一、设计任务 (3)1、题目 (3)2、任务 (3)3、主参数 (3)二、产品总功能的确定 (4)1、单坐标定位。
(4)2、三平面直线插补和圆弧插补。
(4)三、总体方案的确定 (7)1、机械传动部件的选择 (7)2、动力装置的选择 (7)3、.检测与传感装置的选择 (8)4、.控制与信息处理装置的选择 (8)四、机械传动部件的计算与选型 (9)1、滚珠丝杠螺母副的计算与选型 (9)2、步进电机的计算与选型 (12)五、检测与传感装置的计算与选型 (16)1、速度的检测与传感装置 (16)、2.位移的检测与传感装置 (18)六、控制与信息处理装置的选择 (21)1、速度控制 (21)2、CPU的选择 (27)七、工作台系统的功能框图 (28)八、工作台装配图的绘制 (28)九、部分源代码 (29)十、感悟与总结 (33)十一、参考文献 (33)一、设计任务1、题目三自由度平动机械手工作台机电系统设计2、任务设计一种适用于机械手空间平动的工作台3、主参数(1)、X、Y、Z方向脉冲当量:= = =0.005mm/脉冲(2)、X、Y、Z方向的定位精度均为:0.01mm(3)、工作台空载最快移动速度:= = =3000mm/min(4)、工作台负载最快移动速度:= = =400mm/min(5)、工作台空间尺寸:500mm500mm500mm(6)、工作台工作空间尺寸:400mm400mm400mm (7)、空载启动时间:Δt=25ms二、产品总功能的确定1、单坐标定位。
2、三平面直线插补和圆弧插补。
本例中采用逐点比较法进行直线和圆弧的插补(1)逐点比较法插补的基本原理逐点比较法插补的基本思路是:在从起点到终点的路程中,根据机械手当前位置与给定轨迹的偏离情况,并为消除这个偏离,在其中一个坐标轴上走一小步,这样一步步直到终点,每一步都是用给定轨迹对实际轨迹进行修正.每一步作为一个插补计算循环。
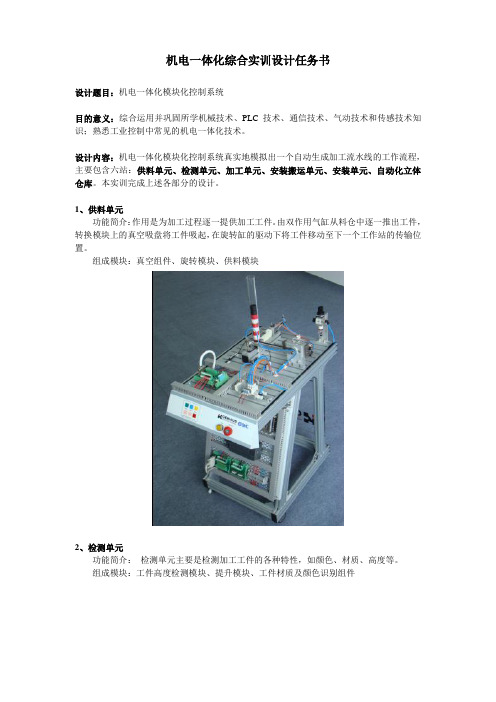
机电一体化综合实训设计任务书设计题目:机电一体化模块化控制系统目的意义:综合运用并巩固所学机械技术、PLC技术、通信技术、气动技术和传感技术知识;熟悉工业控制中常见的机电一体化技术。
设计内容:机电一体化模块化控制系统真实地模拟出一个自动生成加工流水线的工作流程,主要包含六站:供料单元、检测单元、加工单元、安装搬运单元、安装单元、自动化立体仓库。
本实训完成上述各部分的设计。
1、供料单元功能简介:作用是为加工过程逐一提供加工工件。
由双作用气缸从料仓中逐一推出工件,转换模块上的真空吸盘将工件吸起,在旋转缸的驱动下将工件移动至下一个工作站的传输位置。
组成模块:真空组件、旋转模块、供料模块2、检测单元功能简介:检测单元主要是检测加工工件的各种特性,如颜色、材质、高度等。
组成模块:工件高度检测模块、提升模块、工件材质及颜色识别组件3、加工单元功能简介:工件将在旋转平台上被检测及加工。
通过具有六个工位的加工旋转平台,进行加工模拟,并进行加工质量的模拟检测。
组成模块:旋转平台、模拟钻孔模块、模拟检测组件4、安装搬运单元功能简介:将工件从前一站搬运至下一站,并可在本站上完成大、小工件的组装。
PLC 主机:西门子S7-200 系列扩展模块:PPI网络组成模块:提升模块、气动夹爪组件、直线运动无杆缸5、安装单元功能简介:该单元提供两色小工件,并能将其输入大工件的空腔中。
气缸将料仓中的两色小工件交替推出,由真空吸盘吸取,通过转臂输入到大工件的空腔中。
组成模块:送料模块、旋转模块、真空组件6、自动化立体仓库功能简介:该站为仓库存储的模拟,它将系统加工完成的合格产品,按照不同类别,进行分类立体存放。
步进电机及驱动器:Start组成模块:步进电机控制模块、滚珠丝杆模块、工件推出组件、立体仓库设计步骤:1、每个同学至少选择一个模块。
2、理解每个模块的设计目的,确定设计方案。
3、确定PLC的I/O分配表。
4、画气动接线图5、画电气连接图(原理图、PLC输出接线图、PLC输入接线图)6、画程序流程图7、编写PLC程序8、上机调试9、书写设计说明书(至少15页),需打印装订成册10、上交内容:包含2-8项的磁盘、所有的设计图纸和设计说明书,放入档案袋设计要求:1、PLC 主机:西门子S7-200 系列2、PLC软件用STEP 7-MicroWIN3、PLC通信扩展模块:PPI网络4、气动软件FluidSIM-P 3.65、面板按钮和指示灯如下:开始(START)灯:Q1.0 按钮:I1.0复位(RESET)灯:Q1.1 按钮:I1.1单机(SPECIAL)运行按钮:I1.2手动/自动(MANUN/AUTO)运行按钮:I1.3 单机/联网(SINGLE/NET)运行按钮:I1.4注意事项:1、接线不通电、通电不接线2、按规范操作,经老师允许才可以通电3、做实验时不许打闹。
机电一体化课程设计说明书机电工程学院课程设计(专业方向设计)说明书(2014 /2015 学年第一学期)课程名称:机电一体化课程设计题目:工业机械手设计专业班级:学生姓名:学号:指导教师:设计周数:三周设计成绩:2015年12月31日目录第一章工业机械手综述 01.1工业机械手的发展概况 01.2工业机械手的应用 01.3工业机械手的组成及原理 (1)第二章伸缩臂的设计方案 (4)2.1 设计方案论证以及确定 (4)2.1.1 设计参数及要求 (4)2.1.2 设计方案的比较论证 (4)2.2 机械手伸缩臂总体结构设计方案 (4)2.3 执行装置的设计方案 (5)2.3.1 滚珠丝杠的选择 (5)2.3.2减速齿轮的有关计算 (12)2.3.3电动机的选择 (17)第三章 PLC控制系统设计 (20)3.1 PLC的构成及工作原理 (20)3.2 选择PLC (21)3.3 PLC外部I/O分配图 (22)3.4 软件设计 (23)3.5 硬件设计 (33)总结 (34)参考文献 (35)第一章工业机械手综述1.1工业机械手的发展概况工业机械手在先进制造技术领域中扮演着极其重要的角色,是近几十年发展起来的一种高科技自动化生产设备,是一种能自动化定位控制并可重新编程序以变动的多功能机器,它有多个自由度,可用来搬运物体以完成在各个不同环境中工作。
工业机械手即工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的现代化制造业重要的自动化装备。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
1.2工业机械手的应用机械手是工业自动控制领域中经常遇到的一种控制对象。
机械手可以完成许多工作,如搬物、装配、切割、喷染等等,应用非常广泛广泛。
在现代工业中,生产过程中的自动化已成为突出的主题。
各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作。
目录目录 0一、总体方案设计 (1)1.1 设计任务 (1)1.2 总体方案确定 (1)(1)系统的运动方式与伺服系统 (1)(2)计算机系统 (1)(3)X轴进给系统的传动方式 (1)(4)X轴进给传动系统示意图 (2)2.1工作台外形尺寸及重量估算 (2)2.2滚动导轨的参数确定 (2)⑴导轨型式: (3)⑵导轨长度: (3)⑶直线滚动轴承的选型 (3)⑷滚动导轨刚度及预紧方法 (3)2.3滚珠丝杠的设计计算 (3)⑴、最大动负载Q的计算 (4)⑵滚珠丝杠螺母副几何参数计算 (4)⑶传动效率计算 (5)⑷刚度验算 (5)⑸稳定性验算 (6)2.4步进电机的选用 (6)⑴步进电机的步距角 (6)⑵步进电机启动力矩的计算 (6)⑶步进电机的最高工作频率 (7)2.5确定传动比 (8)2.6步进电机惯性负载的计算 (8)三、附录 ................................. 错误!未定义书签。
参考文献 (10)一、总体方案设计1.1 设计任务设计一个数控X-Y工作台及其控制系统。
该工作台可用于铣床上坐标孔的加工和腊摸、塑料、铝合金零件的二维曲线加工,重复定位精度为±0.01mm,定位精度为0.025mm。
设计参数如下:负载重量G=150N;台面尺寸C×B×H=145mm×160mm×12mm;底座外形尺寸C1×B1×H1=210mm×220mm×140mm;最大长度L=388mm;工作台加工范围X=55mm,Y=50mm;工作台最大快移速度为1.5m/min。
1.2 总体方案确定(1)系统的运动方式与伺服系统由于工件在移动的过程中没有进行切削,故应用点位控制系统。
定位方式采用增量坐标控制。
为了简化结构,降低成本,采用步进电机开环伺服系统驱动X-Y 工作台。
(2)计算机系统本设计采用了与MCS-51系列兼容的AT89S51单片机控制系统。
机电⼀体化系统设计说明书课程设计说明书课程设计名称:机电⼀体化系统设计专业班级:机械电⼦⼯程XXX 学⽣姓名: X X X 学号: 09143413 指导⽼师: XXX机电⼀体化系统设计摘要:本次系统设计是完成典型机电⼀体化装置,该装置有车体和电路两个模块,车体有三个轮⼦,车体宽度可调,⽤齿轮齿条传动⽅式来实现左右轮距的调节范围为200mm到250mm。
该⼩车能够以光控⽅式启动,从起点出发,并沿“L”形路线运⾏,最终停靠在指定的终点位置。
将⼩车整体车形设计成“凸”形,⽤直流继电器输出稳定电压来控制⼩车驱动电机转动,⽤时控复位开关来控制由555定时器够成的单稳态电路,输出⼀个1S低电平脉冲波来实现⼩车转弯。
转弯后⽤另⼀个时控复位开关,响应时间继电器(E模式),来实现⼩车车轮距从200mm变到250mm,从⽽完成设计任务。
关键词:齿轮齿条、车轮轴、光控、555定时器、直流继电器、时间继电器Abstract:The system design is complete typical electromechanical device, this device has a body and two module circuit, the hull has three wheels, car body width can be adjusted, with gear rack drive ways around the adjustment range between 200 mm to 250 mm. The car to start, from control way start, and the "L" type line operation, at the end of the final designated location. Will the car whole car shape design into "convex" form, with ordinary relay stable output voltage to control the car drive motor rotation and use control switch to control by 555 reset timers enough of a single state circuit, output a 1 S low level pulse wave to realize the turning of the car. After turning with another possession in reset switch, response time relay (E mode), to realize the car wheels from 200 mm changed from 250 to mm, thus completing design task.Keyword:Super-modulus gear, electric, car wheel, 555 timer, Dc relay, time relay⼀、课程设计的⽬的要求和简介设计⽬的:通过典型机电⼀体化装置的设计,进⼀步加深对机械电⼦专业知识和理论知识学习的认识和理解,使⾃⼰的设计⽔平和对所学知识的应⽤能⼒以及分析问题、解决问题的能⼒得到全⾯提⾼。
机电一体化大作业便携式折叠电动车
设计说明书
农机一班
第六小组
成员:潘江20126901
吴正凯20121100
张韬20126906
刘威20121098
许沛东20126897
目录
一、前言 (1)
二、部分国家标准 (1)
三、外形设计 (3)
四、折叠机构 (4)
五、尺寸设计 (5)
六、动力部分 (6)
七、电路设计 (6)
八、结语 (7)
一、前言
随着经济发展,节能与环保已经成为人们生活中不可缺少的一环,现在折叠自行车以及电动车已在日常生活中得到广泛使用。
虽然折叠自行车方便携带,但远不及电动车快捷,但电动车的缺点则是体积较大,在要换乘其他交通时会比较麻烦。
如果把电动车做成可折叠的,那既能集合两者优点,还可起到防盗的作用。
近年来国内外都有针对该问题的研究,并有一些折叠电动自行车已经投入生产和使用,但是经过我们的调研,市场上现存的折叠电动自行车折叠方式单一,基本上都是在中轴部位前后对折,折叠后形状很不规则,携带困难;也有一些产品,折叠后形状较为规则,但是折叠过程繁琐,且价格昂贵,不适合现在中国现在的消费群体。
在此基础上,我们团队设计了一款可折叠的便携式电动车,结构简单,折叠方便,同时在考虑安全性、实用性的基础上尽可能地降低成本,以满足大部分人的需求。
二、部分国家标准
根据电动自行车通用技术条件(GB17761-1999),罗列部分电动车技术要求,为更进一步设计打好基础。
5.1 整车主要技术性能要求
5.1.1 最高车速
电动自行车最高车速应不大于20k m/h.
5.1.2 整车质量(重量)
电动自行车的整车质量(重量)应不大于40k g,
5.1.3 脚踏行驶能力
电动自行车必须具有良好的脚踏骑行功能,30m in的脚
踏行驶距离应不小于7k m,
5.1.4 续行里程
电动自行车一次充电后的续行里程应不小于25k m,
5.1.5 最大骑行噪声
电动自行车以最高车速作电动匀速骑行时(电助动的以1 5k m/h-18k m/h速度电助动骑行)的噪声应不大于62 dB(A)。
5.1.6 百公里电耗
电动自行车以电动骑行(电助动的以电助动骑行),100k m的电能消耗应不大于1.2 k W "h ,
5.1.7 电动机功率
电动自行车的电动机额定连续输出功率应不大于240W ,
5.2 整车安全要求
5.2.1 制动性能
电动自以最高车速电动骑行时(电助动的以20k m/h
的车速电助动骑行),其干态制动距离应不大于4 m,湿态
制动距离应不大于15 m。
三、外形设计
我们设计的可折叠电动自行车主要由前叉,梁架,座架,车座,车轮以及脚踏板以及电路部分等组成,电池放置于前叉之间,电动车采用特种复合材料构成,在考虑结实的基础上尽量减轻重量。
我们设计的便携式折叠电动自行车外形如下图
这是折叠电动自行车未折叠前的简单外形,其折叠后的简单外形图如下图所示主要思路是将前车叉折叠到横架上,将座架拆下附于横架上,使之呈直线分布,在
直立状态时大大的节省了空间,另外,我们又想在车架尾部添加两个小轮,使折叠后的电动自行车能够像行李箱一样可以拖拉,方便携带。
四、折叠机构
我们设计的折叠电动自行车折叠简单,可以快速实现折叠,其最主要的折叠机构如下图所示
这个主要折叠机构主要是由一个横向轴承和一个竖向轴承构成,其中横向轴承用于折叠,竖向轴承用于前叉转向,另外横向轴承中加入限制卡槽,用于限制其折叠位置。
另外在座架处不设折叠机构,采取活动式,可直接取下附于车架上。
五、尺寸设计
横架总长1000mm 前叉高800mm
车轮直径254mm(10吋)轮距760mm
座架高度500mm 把手可伸缩,伸长700mm缩短400mm
折叠之后直立高度1200mm
下图为我们用CAD画的尺寸简图
六、动力设计
由前面设计车轮直径10吋以及国家标准中设计要求中最高速度为20Km/h,可以计算得车轮转速需求为260r/min,另外,根据所学动力学知识,在忽略空气阻力的前提下,计算得所需的牵引力为46.46N,然后查阅有关资料及上网查询,选择电动机为36V,转速260r/min,牵引力大于46.46N,永磁无刷直流电机,电池选用36V,8A的锂离子电池,同时电池形状特别订做,以适应电动车需求。
七、电路设计
我们设计的电动车电路图如下图所示:
八、结语
随着国家对环保出行的大力推行,电动自行车的发展前景一片明朗,而折叠电动自行车的轻便省力、环保节能、价格适中等特点,注定了以后将会受大多数城市人所追崇,同时,随着科技发展,材料、电源的性能将大幅提升,届时,折叠电动自行车将会更加普及,甚至代替自行车。
通过准备这次课题,我们小组成员不仅夯实了课堂所学知识,同时拓展了我们的视野,提高了我们的操作能力,更使我们小组成员之间的团结意识,配合意识有了进一步的升华。