PID算法理论与电机控速的设计
- 格式:pdf
- 大小:1.80 MB
- 文档页数:10

PID控制原理及参数设定PID控制是一种常用的自动控制算法,它通过反馈控制的方式,根据控制对象的输出与期望目标的差异来调整输入信号,实现对控制对象的稳定控制。
PID控制由比例(P)、积分(I)和微分(D)三部分组成,分别对应了不同的控制机制。
P(比例)控制是指控制信号与误差的线性比例关系,P控制主要用于快速响应系统,能够快速减小误差,但不能完全消除误差。
P控制的公式为:u(t)=Kp*e(t),其中u(t)表示控制信号,Kp为比例增益,e(t)为误差。
通过调节比例增益Kp的大小,可以控制系统的响应速度。
I(积分)控制是指控制信号与误差的累积关系,I控制主要用于消除系统的稳态误差。
I控制的公式为:u(t) = Ki * ∫e(t)dt,其中Ki为积分增益。
通过调节积分增益Ki的大小,可以控制系统的稳态误差。
D(微分)控制是指控制信号与误差的变化率关系,D控制主要用于抑制系统的超调和震荡。
D控制的公式为:u(t) = Kd * de(t)/dt,其中Kd为微分增益,de(t)/dt为误差的变化率。
通过调节微分增益Kd的大小,可以控制系统的稳定性和响应速度。
根据PID控制的原理,控制信号可以表示为:u(t) = Kp * e(t) +Ki * ∫e(t)dt + Kd * de(t)/dt。
其中,e(t)为误差,t为时间。
在实际应用中,PID控制器还需要设置参数,包括比例增益Kp、积分增益Ki和微分增益Kd。
如何设置这些参数是设计一个有效的PID控制器的关键。
参数设定方法有很多种,常用的方法包括经验法、试验法和自整定法等。
经验法是一种基于经验规则的参数设定方法,它根据控制对象的特性和应用经验来选取参数。
经验法比较简单易用,但通常需要根据实际情况进行适当的调整。
试验法是通过试验分析控制对象的动态响应来选取参数,常用的试验方法有阶跃响应法、脉冲响应法和频率响应法等。
试验法的参数设定相对准确,但需要进行一定的试验工作,并且需要对试验数据进行分析。
用PID调节优化电机驱动系统的效率和精度PID调节是一种常用的控制策略,可用于优化电机驱动系统的效率和精度。
本文将介绍PID调节的原理和应用,并探讨其在电机驱动系统中的具体应用案例。
一、PID调节的原理PID调节是一种基于反馈控制的方法,通过不断调整输出信号,使系统的实际输出与期望输出之间达到最优的差距。
PID控制器由比例(P)、积分(I)和微分(D)三个部分组成。
1. 比例(Proportional)部分:根据误差的大小决定输出信号的变化幅度。
比例控制主要用于快速响应系统变化,并减小稳态误差。
2. 积分(Integral)部分:根据误差的累积值决定输出信号的变化幅度。
积分控制主要用于消除系统的静态误差。
3. 微分(Derivative)部分:通过计算误差变化率来调整输出信号的变化速度。
微分控制主要用于抑制系统的震荡和提高系统的稳定性。
通过合理地调节PID控制器的参数,可以使系统达到期望的效果,并提高系统的响应速度、稳定性和精度。
二、PID调节在电机驱动系统中的应用电机驱动系统是一种常见的控制系统,PID调节在其中被广泛应用。
下面将以直流电机驱动系统为例,介绍PID调节在电机驱动中的应用。
1. 速度控制直流电机的转速控制是电机驱动系统的重要任务之一。
PID调节可用于实时调整电机的驱动信号,使电机达到期望的转速。
控制器根据电机实际转速与期望转速之间的差异,不断调整输出信号,实现电机转速的精确控制。
2. 位置控制除了速度控制,PID调节还可用于电机的位置控制。
通过控制电机的驱动信号,使电机在给定的位置上停止或定位到指定位置。
控制器根据电机实际位置与期望位置之间的差异,调整输出信号,实现电机位置的精确控制。
3. 力矩控制在某些应用中,需要通过控制电机的力矩来实现特定的任务。
PID 调节可用于调整电机的驱动信号,使电机输出期望的力矩。
控制器根据电机实际输出力矩与期望输出力矩之间的差异,调整输出信号,实现电机力矩的精确控制。

电机控制pid算法电机控制PID算法引言:PID(Proportional-Integral-Derivative)算法是一种常用的控制算法,广泛应用于电机控制领域。
本文将详细介绍PID算法的原理和应用,并探讨其在电机控制中的作用和优势。
一、PID算法原理1. 比例控制(P):比例控制是一种基本的反馈控制方法,其输出与误差成正比。
在电机控制中,比例控制可用于调整电机的速度或位置。
通过设置适当的比例增益,可以实现快速响应和准确控制。
2. 积分控制(I):积分控制用于消除静态误差,通过对误差进行积分来修正系统偏差。
在电机控制中,积分控制可用于消除电机运行过程中的误差,提高控制精度和稳定性。
3. 微分控制(D):微分控制用于抑制系统的超调和振荡,通过对误差的变化率进行微分来提前预测系统的响应。
在电机控制中,微分控制可用于提高系统的动态响应,减小系统的超调和振荡。
二、PID算法应用1. 电机速度控制:PID算法可用于电机的速度控制,通过测量电机的转速与设定值之间的误差,并根据比例、积分和微分系数对误差进行调整,控制电机的输出电压或电流,从而实现精确的速度控制。
2. 电机位置控制:PID算法也可用于电机的位置控制,通过测量电机的位置与设定值之间的误差,并根据比例、积分和微分系数对误差进行调整,控制电机的输出电压或电流,从而实现精确的位置控制。
3. 电机力矩控制:PID算法还可用于电机的力矩控制,通过测量电机的输出力矩与设定值之间的误差,并根据比例、积分和微分系数对误差进行调整,控制电机的输出电压或电流,从而实现精确的力矩控制。
三、PID算法的优势1. 简单易实现:PID算法是一种简单易实现的控制算法,只需调节比例、积分和微分系数即可实现对电机的控制。
算法结构简单,计算量小,适用于实时控制系统。
2. 鲁棒性强:PID算法具有较好的鲁棒性,能够适应不同的工作环境和负载变化。
通过合理调节PID参数,可以使电机控制系统具有较好的稳定性和鲁棒性。

基于PID控制算法的电机速度闭环控制设计电机速度闭环控制是一种常见的控制系统设计方法,其中PID(比例-积分-微分)控制算法被广泛应用。
该算法可以实现速度控制系统的稳定性、灵敏度和响应速度的优化,在工业自动化、机械控制和电动车辆等领域具有重要的应用价值。
本文将介绍基于PID控制算法的电机速度闭环控制设计的原理和实施步骤。
首先,我们需要了解基本的PID控制算法原理。
PID控制器根据当前的误差(偏差)值,计算出控制量来调整系统的输出,从而使得系统的运行状态达到期望值。
PID控制算法由比例项、积分项和微分项组成,分别对应了系统的比例、积分和微分控制。
在电机速度闭环控制设计中,我们需要先进行系统建模和参数估计。
根据电机的数学模型,可以得到速度闭环系统的传递函数。
然后,通过实验或数据采集,估计出系统的参数,包括比例增益系数、积分时间常数和微分时间常数等。
接下来,需要设计PID控制器的参数。
这里使用经典的Ziegler-Nichols方法来进行参数整定。
该方法包括两个步骤:首先,将PID控制器的积分和微分项都设置为零,只调节比例项,使系统产生临界振荡;然后,根据临界振荡的特性,计算出合适的比例增益系数和临界周期。
最后,根据设定的性能指标,调节PID控制器的参数,使得系统的响应速度和稳定性达到最优。
设计好PID控制器的参数后,进行实际的控制器搭建和调试。
在控制器搭建中,可以选择使用模拟电路还是数字信号处理器(DSP)实现PID控制算法。
模拟电路适合于简单的控制系统,而DSP则适用于更复杂的控制系统。
在控制器调试过程中,需要根据实际的反馈信号对PID参数进行调整,并进行系统的反馈校正。
此外,还应考虑到各种干扰因素(如摩擦、负载变化等)对系统性能的影响,通过合理的饱和、限幅和滤波等方法对系统进行稳定性增强。
最后,进行系统的性能评估和优化。
利用实验数据,可以评估系统的稳定性、响应速度、误差性能等指标,根据评估结果对控制器参数进行微调,以达到最佳控制效果。
PID算法原理及调整规律一、PID算法简介在智能车竞赛中,要想让智能车根据赛道的不断变化灵活的行进,PID算法的采用很有意义。
首先必须明确PID算法是基于反馈的。
一般情况下,这个反馈就是速度传感器返回给单片机当前电机的转速。
简单的说,就是用这个反馈跟预设值进行比较,如果转速偏大,就减小电机两端的电压;相反,则增加电机两端的电压。
顾名思义,P指是比例(Proportion),I指是积分(Integral),D指微分(Differential)。
在电机调速系统中,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。
要想搞懂PID算法的原理,首先必须先明白P,I,D各自的含义及控制规律:比例P:比例项部分其实就是对预设值和反馈值差值的发大倍数。
举个例子,假如原来电机两端的电压为U0,比例P为0.2,输入值是800,而反馈值是1000,那么输出到电机两端的电压应变为U0+0.2*(800-1000)。
从而达到了调节速度的目的。
显然比例P越大时,电机转速回归到输入值的速度将更快,及调节灵敏度就越高。
从而,加大P值,可以减少从非稳态到稳态的时间。
但是同时也可能造成电机转速在预设值附近振荡的情形,所以又引入积分I解决此问题。
积分I:顾名思义,积分项部分其实就是对预设值和反馈值之间的差值在时间上进行累加。
当差值不是很大时,为了不引起振荡。
可以先让电机按原转速继续运行。
当时要将这个差值用积分项累加。
当这个和累加到一定值时,再一次性进行处理。
从而避免了振荡现象的发生。
可见,积分项的调节存在明显的滞后。
而且I值越大,滞后效果越明显。
微分D:微分项部分其实就是求电机转速的变化率。
也就是前后两次差值的差而已。
也就是说,微分项是根据差值变化的速率,提前给出一个相应的调节动作。
可见微分项的调节是超前的。
并且D值越大,超前作用越明显。
可以在一定程度上缓冲振荡。
比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。

基于单片机pid算法的直流电机速度控制方法基于单片机PID算法的直流电机速度控制方法是一种常用的技术,其基本原理是通过调节PWM(脉宽调制)信号的占空比来控制电机的输入电压,从而实现电机的速度控制。
以下是基于单片机PID算法的直流电机速度控制方法的基本步骤:1.设定目标速度:首先,需要设定电机的目标速度。
这可以通过按键或其他输入设备来实现。
2.采集实际速度:为了实现精确的控制,需要实时获取电机的实际速度。
这可以通过在电机转轴上安装光电编码器或霍尔传感器来实现,这些传感器可以实时检测电机的转速并将其转换为电信号。
3.计算偏差:单片机通过比较目标速度和实际速度,计算出速度偏差。
如果实际速度小于目标速度,偏差为负;反之,偏差为正。
4.应用PID算法:单片机使用PID算法来处理速度偏差。
PID控制器通过比例、积分和微分三个环节来计算控制量,以尽可能消除偏差。
具体的PID参数(如Kp、Ki、Kd)可以根据实际情况进行调整,以获得最佳的控制效果。
5.生成PWM信号:基于PID控制器的输出,单片机生成PWM信号来调节电机的输入电压。
占空比决定了电机输入电压的大小,进而影响电机的转速。
6.实时调整:在整个控制过程中,单片机不断采集电机的实际速度,计算偏差,并调整PWM信号的占空比,以使电机尽可能接近目标速度。
7.显示和保存数据:为了方便调试和观察,可以通过单片机的显示屏实时显示电机的实际速度和偏差。
此外,也可以将重要的数据保存在单片机的内部或外部存储器中。
8.安全保护:为了防止电机过载或意外事故,单片机应具备安全保护功能。
例如,当电机实际速度超过设定速度一定时间时,单片机应自动切断电源或发出报警信号。
基于单片机PID算法的直流电机速度控制方法具有精度高、稳定性好、适应性强等优点,广泛应用于各种需要精确控制电机速度的场合。
基于PID控制算法的电机转矩控制系统设计电机转矩控制是现代工业中广泛使用的一种控制技术,PID(比例-积分-微分)控制算法是其中最常用的一种控制策略。
本文将详细介绍基于PID控制算法的电机转矩控制系统设计的相关内容。
一、引言电机转矩控制系统广泛应用于工业生产中,对于提高系统的稳定性和响应速度至关重要。
PID控制算法是一种经典的反馈控制技术,通过对误差信号进行比例、积分和微分计算,并与设定值进行比较,实现对输出转矩的精确控制。
本文将详细介绍基于PID控制算法的电机转矩控制系统设计的原理与方法。
二、PID控制算法的基本原理PID控制算法通过不断调整控制信号,使目标变量趋向于设定值。
其基本原理是根据目标变量与设定值之间的误差信号,通过比例调节、积分调节和微分调节来计算控制信号。
1. 比例调节比例调节是根据误差信号的大小来调整控制信号的幅值。
比例调节能够快速响应系统的变化,但容易产生超调和震荡现象。
2. 积分调节积分调节是根据误差信号的累积值来调整控制信号的幅值。
积分调节能够消除静态误差,提高系统的稳定性。
但过大的积分时间常数可能导致系统响应过慢或产生超调。
3. 微分调节微分调节是根据误差信号的变化率来调整控制信号的幅值。
微分调节能够预测系统的变化趋势,抑制超调和震荡现象。
但过大的微分时间常数可能使系统对噪声和干扰敏感。
三、基于PID控制算法的电机转矩控制系统设计步骤基于PID控制算法的电机转矩控制系统设计包括以下步骤:1. 系统建模根据电机的特性和传动装置的传动比,建立电机转矩与控制输入(电流或电压)之间的数学模型。
常用的电机模型有直流电机模型、交流感应电机模型等。
2. 设定转矩根据实际需求,确定期望的转矩曲线。
将期望的转矩曲线转化为设定值信号,作为PID控制算法的输入。
3. PID参数调整根据电机系统的特性和性能要求,选择合适的PID参数。
常用的参数调整方法有经验调参法、试探-比较法和优化算法等。
通过试验和仿真,不断调整PID参数,使系统能够快速响应、稳定运行。

基于PID算法的电机控制研究一、绪论电机的控制一直是工业自动化的一个重要领域,而在电机控制中,PID算法(比例积分微分控制)是一种常用的方法。
PID算法是一种反馈控制算法,通过反馈信号来调整控制输出,使系统的输出达到期望值,因此在电机控制中得到了广泛应用。
本文将对PID算法在电机控制中的应用进行研究。
二、PID算法原理PID算法在控制系统中起着非常重要的作用,它是一种经典的控制方法,具有以下三个控制系数:比例系数、积分系数和微分系数。
其中,比例系数控制当前误差量,积分系数控制过去误差量的积累,微分系数控制误差量的变化率,具体公式如下:$p(t) = K_p e(t)$$i(t) = K_i\int_{0}^t e(\tau) d\tau$$d(t) = K_d\frac{d e(t)}{d t}$其中,$e(t)$表示当前误差量,$p(t)$表示比例控制器的输出,$i(t)$表示积分控制器的输出,$d(t)$表示微分控制器的输出,$K_p$、$K_i$和$K_d$分别为比例系数、积分系数和微分系数。
通过调整这三个控制系数的大小,可以达到对系统的控制,从而实现对电机的控制。
三、PID算法在电机控制中的应用PID算法在电机控制中的应用非常广泛,一般用于直流电机、步进电机等电机的速度和位置控制。
1. 直流电机控制直流电机控制一般采用PWM调速,在此基础上使用PID算法进行电机调速控制。
通过测量电机的旋转速度和所需速度之间的误差量,来调整PID算法中的比例系数、积分系数和微分系数,从而实现对电机的控制。
2. 步进电机控制步进电机控制可以分为开环控制和闭环控制两种方式,而PID 算法主要用于闭环控制。
通过测量步进电机驱动器的输出电流和所需电流之间的误差量,来调整PID算法中的比例系数、积分系数和微分系数,从而实现对步进电机的控制。
四、PID算法在电机控制中的优缺点1. 优点a. 反应速度快,动态性能好。
b. 稳态误差小,能够准确控制电机的位置、速度等参数。

基于PID控制算法的电机速度控制系统设计与优化电机速度控制系统是一种常见的自动控制系统,它通过控制电机的输入信号,使电机的转速达到预定的目标值。
PID控制算法是一种经典的控制算法,通过比较实际输出和期望输出的差异,计算出控制信号来实现目标控制。
在设计和优化基于PID控制算法的电机速度控制系统时,首先需要明确系统的基本要求和性能指标。
常见的要求包括稳态误差、响应时间、控制精度等。
根据这些要求,可以选择合适的PID控制器参数。
首先,需要了解电机的数学模型。
电机的数学模型可以通过系统辨识方法获取,也可以根据电机的物理特性进行建模。
数学模型通常使用微分方程、差分方程或传递函数表示。
然后,可以开始设计PID控制器。
PID控制器由比例项、积分项和微分项组成。
比例项对实际输出和期望输出的差异进行直接比例调整;积分项积累误差并补偿稳态误差;微分项根据误差变化率进行调整。
PID控制器的参数调整对于系统的性能至关重要。
常见的PID调参方法包括经验法、试错法和自整定法。
经验法是一种基于经验的调参方法,通过调整参数的大小,观察系统响应和性能来优化参数。
试错法是一种通过不断尝试不同的参数组合,通过试验和调整的方法来找到合适的参数。
自整定法是一种自动调参方法,可以根据系统的响应自动调整参数。
在调参过程中,需要对系统进行测试和实验。
可以通过给系统输入阶跃信号、方波信号或其他合适的输入信号,观察系统的响应和性能,以确定参数的最优值。
除了参数调整外,还可以通过使用先进的控制算法来优化电机速度控制系统。
例如,模糊控制、自适应控制、模型预测控制等。
这些算法可以根据系统的动态特性和非线性特性,采用不同的控制策略来提高系统的性能。
在进行优化时,还可以考虑引入反馈补偿、前馈补偿等技术。
反馈补偿可以通过测量系统输出和期望输出之间的误差,并将其作为控制信号的一部分,来改善系统的性能。
前馈补偿可以通过预测输出值,提前校正控制信号,减小系统响应的延迟。

基于PID控制算法的电机速度闭环控制研究一、引言电机是现代工业中最为广泛使用的设备之一,而电机的速度控制对于工业自动化中的许多应用都至关重要。
PID控制算法是一种常用的控制方法,其结构简单、参数调节方便,因此在电机速度闭环控制中得到了广泛应用。
本文旨在研究基于PID控制算法的电机速度闭环控制,并通过实验验证其控制性能。
二、PID控制算法的基本原理PID控制算法是一种基于误差的反馈控制方法,由比例(P)、积分(I)和微分(D)三部分组成。
其基本原理如下:1. 比例控制(P部分):根据误差信号与比例参数的乘积计算控制量,用于快速响应系统变化产生的误差。
2. 积分控制(I部分):根据误差信号与积分参数的乘积计算控制量,用于自动纠正系统长期的累积误差。
3. 微分控制(D部分):根据误差信号、时间导数以及微分参数的乘积计算控制量,用于预测系统未来发展趋势并对其进行调整。
PID控制算法根据实际系统的特性进行参数调节,以使得系统稳定性和控制性能得到优化。
三、电机速度闭环控制系统的搭建1. 硬件平台搭建在实验中,我们选取一个直流电机作为被控对象,并使用电流环进行电机速度的闭环控制。
搭建硬件平台主要包括直流电机、编码器、电机驱动器和控制器等组成。
2. 调节参数选取在PID控制算法中,参数的选取对系统控制性能具有重要影响。
常用的参数调节方法包括试错法、经验公式法和自整定法等。
在本研究中,我们选取自整定法进行参数调节。
具体方法为:- 设置P、I、D参数初值,并将积分部分和微分部分作为反馈控制的参数。
- 通过实验运行系统,观察系统响应特性,根据实际情况逐步调整参数,使系统达到稳定状态。
- 反复调整参数,直到系统达到理想的控制性能。
3. 控制策略设计在电机速度闭环控制中,我们可以采用位置式PID控制策略或增量式PID控制策略。
位置式PID控制策略将控制量作为控制器的输出,而增量式PID控制策略将增量值作为控制器的输出。
根据实际需求,选择合适的控制策略。

基于pid算法的直流电机转速控制系统的设计基于PID算法的直流电机转速控制系统是现代控制系统的一个重要组成部分。
其主要功能是通过调节电机的电压和电流来控制电机的转速,以达到所需的转速控制效果。
本文将介绍如何设计PID算法控制系统,以实现直流电机的转速控制。
首先,我们需要了解PID算法的基本原理。
PID算法是一种基于反馈控制的方法,它通过对系统的误差进行测量和反馈控制,不断调整输出信号以达到所需的控制效果。
PID算法的核心就是三个控制参数:比例系数、积分系数和微分系数。
我们需要通过试验的方法来调整这些参数以达到最佳的控制效果。
接下来,我们就可以开展PID算法直流电机转速控制系统的设计。
首先,我们需要确定系统的控制目标和工作条件,包括期望转速范围、电机额定电压和电流等参数。
接着,我们需要选择合适的线性二次调节器,并通过MATLAB软件进行参数调整和仿真测试。
在参数调整和仿真测试过程中,需要进行多次试验,找到最佳的控制参数,以达到最理想的转速控制效果。
同时,还需要在系统设计过程中,考虑到一些实际应用中可能出现的问题,如电网失电、电机负载变化等因素,保证控制系统的稳定性和可靠性。
最后,我们需要对设计的PID算法直流电机转速控制系统进行实际测试和验证。
通过实现所设计的控制系统,并进行各项测试和实验,验证其控制效果和性能是否满足所需的要求和标准。
综上所述,基于PID算法的直流电机转速控制是一个相对复杂的系统设计工作,需要掌握一定的控制理论和实践经验。
通过认真的系统设计、参数调整和测试验证,可以实现一个高效、可靠的直流电机转速控制系统。
基于PID算法的直流电机转速控制系统的设计摘要:提出了基于单片机的高精度直流电机控制转速的控制方案,以ATmega16单片机为核心,采用传感器与CPU定时/计数器配合来测速,采用键盘进行数据输入,通过编程实现了电机转速超限、报警等功能。
该装置可以应用于要求转速精确的电器产品中,使直流电机的各种潜在能力得到充分的发挥。
关键词:PID算法转速测量直流电机转速控制单片机与其它类型的电机相比,直流电机具有良好的起动性能,调速范围广,过载能力强等特点,因此直流电机在起动和调速要求较高的生产机械得到了广泛的应用。
随着人民生活水平的提高,对视听设备品质要求也在提高,这为小功率直流电机提供了广阔的市场,因此,高精度控制直流电机转速成为发展的必然趋势。
本文基于PID算法,以ATmega16单片机为核心实现直流电机的高精度控制,具有结构简单,适应性强等特点。
1 总体设计方案系统的总体设计方案如图1所示,包括ATmega16单片机、从单片机、电机转速测量装置、直流电机、键盘输入、显示以及功能控制电路几部分。
以ATmega16单片机为核心,利用ATmega16具有PWM输出功p2.2 电机驱动电路由于ATmega16具有PWM输出功能,所以通过改变占空比就可以控制电动机的转速。
使用光耦Uyyy实现单片机与电机的控制部分和电机驱动部分的电气隔离。
Rggo作为光耦输入端的限流电阻。
Rirf3是上拉电阻,用来提高光耦输出端的驱动能力。
电机上的二极管和电容用来保护电机。
MOS管IRF540作为驱动电路的功率输出。
2.3 电源电路选用7805三端集成稳压器,提供+5V直流电压,输出电流为1A。
交流电压经过DAC1-DAC4桥式整流、电源指示灯及平滑电容Cyl 滤波后得到非稳定8-12V直流电压加到7805的输入端。
在输入和输出分别接人电容Cy3和Cy4来保证电路的稳定工作。
Cy3为输入稳定电容,当稳压器输入阻抗降低时,防止发生振荡,采用0.1-1uF的陶瓷电容。
毕 业 设 计(论 文)课题名称基于PID 算法的电机转速控制系统的设计姓 名叶 强 学 号 071220316 院 系物理与电信工程系 专 业电子信息工程 指导教师叶勇 讲师2011年3月 24日※※※※※※※※※ ※※ ※※ ※※ ※※※※※※※※※ 2011届学生 毕业论文(设计)基于PID算法的电机转速控制系统的设计摘要:在电气时代的今天,电动机一直在现代化的生产和生活中起着十分重要的作用。
据资料统计,现在有的90%以上的动力源来自于电动机,电动机与人们的生活息息相关,密不可分。
随着现代化步伐的迈进,人们对自动化的需求越来越高,使电动机控制向更复杂的控制发展。
目前的直流电机转速控制系统在电机运转稳速、调速、加速或减速三个方面仍然不能满足使用要求。
为了克服直流电机调速系统的缺点,得到高精度的转速,随着电力电子技术的发展,使得比较普遍的用PID调节器来控制直流电机,利用各种新颖的、高性能的控制策略,来使直流电机平稳的运转,这使直流电机的各种潜在能力得到充分的发挥,使电机的性能更符合人们的使用要求。
本设计将介绍一种基于PID算法的直流电机转速控制系统。
本设计选用AT89S52单片机作为信号产生器,应用PID算法,对整个过程进行位置跟踪,PID控制,在设计制作的过程中,考虑到实际需求键盘输入模块和LED显示部分,使本设计的实用性得到了增强。
关键词:直流电机;PID算法;PID控制技术;模糊控制;模糊PID控制器;Abstract:In electrical time's today, the electric motor continuously is playing the very vital role in the modernized production and the life. According to the material statistics, now some 90% above power supplies from the electric motor, the electric motor and people's life are closely linked, inseparable. Along with modernized step forward, the people are getting higher and higher to the automated demand, cause the motor control to the more complex control development.The current dc motor speed control system in the motor operates steady speed, speed, speeds up or slows down three aspects still cannot meet the requirements of operation. In order to overcome the disadvantages of dc motor speed control system, a precision speed, with powerelectronic technology development makes the common use PID regulator to control dc motors, use all sorts of novel, high-performance control strategy, to make dc motor, which make the running smooth various potential dc motor of the ability to get sufficient play, make more people with performance of motor for the use requirement.This design will introduce a method based on PID algorithm of dc motor speed control system. This design multi-back AT89S52 SCM as a signal generator, the application of the whole process, PID algorithm for position tracking, PID control, in design and production process, considering the actual demand keyboard input module and LED display sections, the practicability of this design is enhanced.Key words: Dc motor ;PID algorithm; PID control technology; Fuzzy control; Fuzzy PID controller;引言电动机作为最主要的机电能量转换装置,其应用范围已遍及国民经济的各个领域和人们的日常生活。

pid算法控制电机转速原理英文回答:Proportional-integral-derivative (PID) control is a widely used control algorithm in industrial automation and robotics. It is used to control the speed of electric motors by adjusting the motor's input voltage or current based on the difference between the desired speed and the actual speed.The PID controller consists of three terms:Proportional (P) term: This term is proportional to the error between the desired speed and the actual speed. It provides a quick response to changes in the error.Integral (I) term: This term is proportional to the integral of the error over time. It helps to eliminate steady-state error, which is the difference between the desired speed and the actual speed when the error is zero.Derivative (D) term: This term is proportional to the derivative of the error with respect to time. It helps to predict future changes in the error and provides a faster response.The PID controller gains (Kp, Ki, and Kd) are tuned to optimize the control performance. The tuning process involves finding the values of the gains that provide the desired response, such as fast settling time, minimal overshoot, and good stability.Here is a block diagram of a PID controller used to control the speed of an electric motor:[Block diagram of a PID controller]The reference input is the desired speed, and the feedback input is the actual speed. The error is the difference between the reference and feedback inputs. The PID controller calculates the output voltage or current based on the error and the gains. The output is thenapplied to the motor to control its speed.中文回答:PID算法控制电机转速原理。

电机速度控制PID算法简介电机速度控制是自动化领域中的一项重要技术,广泛应用于工业生产、交通运输、航空航天等领域。
PID(Proportional-Integral-Derivative)算法是一种常见的控制算法,可以实现对电机速度的精确控制。
本文将详细介绍电机速度控制PID算法的原理、实现方法和优化技巧。
原理PID算法基于对系统误差进行反馈调整,通过不断调节输出信号来使得系统达到期望状态。
其中,Proportional(比例)部分根据误差大小进行比例放大;Integral (积分)部分根据误差累积值进行积分调整;Derivative(微分)部分根据误差变化率进行微分调整。
三个部分的输出信号相加后作为最终的控制量。
具体地,假设电机当前转速为?,期望转速为,并定义误差为? = - ?,则PID输出信号为:u = Kp * e + Ki * ∫e dt + Kd * de/dt其中,Kp、Ki和Kd分别为比例、积分和微分参数。
通过调节这三个参数的大小,可以实现对电机速度的精确控制。
实现方法电机速度控制PID算法的实现一般分为离散和连续两种方法。
离散PID算法离散PID算法是指将连续时间下的PID算法转化为离散时间下的计算方法。
常用的离散化方法有采样周期T、增量式和位置式三种。
•采样周期T:将连续时间下的微分项转化为差分项,使用近似微分公式计算微分部分。
•增量式:将比例、积分和微分部分都看作增量,通过差值计算得到输出信号。
•位置式:将比例、积分和微分部分都看作位置,通过累加计算得到输出信号。
在具体实现时,需要注意选择合适的采样周期、调节比例、积分和微分参数,并进行输出限幅处理,以避免过大或过小的输出信号。
连续PID算法连续PID算法是指直接在连续时间下计算PID输出信号。
一般使用数学模型进行求解,可以通过微积分公式得到精确解析解。
具体实现时,需要根据电机系统的特性建立数学模型,确定比例、积分和微分参数,并进行输出限幅处理。
电机控制中pid算法解析电机控制中的PID算法是一种经典的闭环控制算法,广泛应用于工业控制领域。
PID代表比例(Proportional)、积分(Integral)和微分(Derivative),这三个元素通过不同的方式影响控制器的输出,以达到减小系统误差、提高系统稳定性和响应速度的目的。
1. 比例(P)控制:比例控制是最基本的控制方式,它的输出与误差(设定值与实际值的差)成正比。
比例系数(Kp)决定了控制器的响应速度和对误差的敏感度。
比例系数越大,系统响应越快,但可能会导致系统超调和震荡;比例系数越小,系统越稳定,但响应速度会变慢。
仅使用比例控制可能会产生静态误差,即系统稳定后输出值与设定值之间仍存在差异。
2. 积分(I)控制:积分控制用于消除静态误差。
它通过对误差进行积分,使控制器在误差存在时持续调整输出。
积分时间常数(Ti)决定了积分作用的强度。
积分时间常数越小,积分作用越强,系统消除静态误差的速度越快,但也可能导致系统超调和震荡;积分时间常数越大,积分作用越弱,系统越稳定,但消除静态误差的速度会变慢。
3. 微分(D)控制:微分控制用于预测误差的变化趋势,并在误差增大之前采取措施。
它通过计算误差的变化率(即微分)来调整控制器的输出。
微分时间常数(Td)决定了微分作用的强度。
适当的微分控制可以提高系统的稳定性,减小超调和震荡,但微分作用对噪声敏感,可能导致系统在干扰下不稳定。
在电机控制中,PID算法的实现需要考虑电机的特性、控制要求以及系统环境等因素。
例如,对于需要快速响应且对精度要求较高的系统,可能需要采用较大的比例系数和较小的积分时间常数;对于容易受到外部干扰的系统,可能需要谨慎使用微分控制或增加滤波器以降低噪声影响。
此外,PID算法还有多种变体,如位置式PID和增量式PID。
位置式PID直接计算控制器的输出值,而增量式PID计算输出值的变化量,适用于执行机构具有记忆功能(如步进电机)的场景。

电机控制系统中的PID调节技术电机控制系统是现代工业中常见的控制系统之一,它的性能和稳定性直接影响到整个生产线的运行效率。
PID调节技术是一种广泛应用于电机控制系统中的控制算法,它通过不断地调节比例、积分和微分三个参数,使得系统输出与期望值之间达到最佳的匹配,从而实现精准的控制。
本文将详细介绍电机控制系统中PID调节技术的原理和应用。
一、PID调节技术的原理PID调节技术是由比例(P)、积分(I)和微分(D)三个参数组成的控制算法。
比例参数主要用来调节系统的响应速度,当比例参数增大时,系统的超调量会减小,但会增加震荡的可能性;积分参数主要用来减小稳态误差,当积分参数增大时,系统对于稳态误差的消除能力会增强,但会增加系统的超调量;微分参数主要用来抑制系统的震荡,当微分参数增大时,系统对于幅度变化较大的信号会有更快的响应速度,但会增加系统的灵敏度。
通过不断地调节这三个参数,PID调节技术可以使得系统输出与期望值之间达到最佳的匹配,从而实现精准的控制。
二、PID调节技术在电机控制系统中的应用在电机控制系统中,PID调节技术被广泛地应用于速度控制、位置控制和力控制等方面。
在速度控制方面,通过对电机的电压和电流进行PID调节,可以精确地控制电机的转速,使得电机在不同转速下都能够保持稳定的运行状态。
在位置控制方面,通过对电机的脉冲信号和位置反馈信号进行PID调节,可以实现电机的定位精度,使得电机可以按照指定的位置轨迹进行准确移动。
在力控制方面,通过对电机的输出力矩进行PID调节,可以控制电机输出的力矩大小,使得电机可以完成各种力控制任务。
三、PID调节技术在电机控制系统中的优势PID调节技术在电机控制系统中具有响应速度快、稳态误差小、抗干扰能力强等优势。
由于PID调节技术具有简单易实现的特点,因此被广泛地应用于各种电机控制系统中。
此外,PID调节技术在参数调节方面也比较灵活,可以根据实际控制需求不断地调节参数,使得系统能够在不同的工况下都能够保持优良的控制性能。
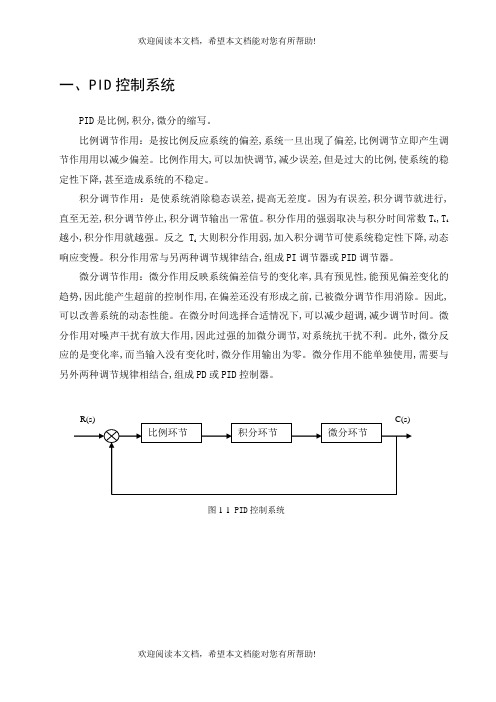
一、PID控制系统PID是比例,积分,微分的缩写。
比例调节作用:是按比例反应系统的偏差,系统一旦出现了偏差,比例调节立即产生调节作用用以减少偏差。
比例作用大,可以加快调节,减少误差,但是过大的比例,使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用:是使系统消除稳态误差,提高无差度。
因为有误差,积分调节就进行,直至无差,积分调节停止,积分调节输出一常值。
积分作用的强弱取决与积分时间常数Ti ,Ti越小,积分作用就越强。
反之Ti大则积分作用弱,加入积分调节可使系统稳定性下降,动态响应变慢。
积分作用常与另两种调节规律结合,组成PI调节器或PID调节器。
微分调节作用:微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,因此能产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除。
因此,可以改善系统的动态性能。
在微分时间选择合适情况下,可以减少超调,减少调节时间。
微分作用对噪声干扰有放大作用,因此过强的加微分调节,对系统抗干扰不利。
此外,微分反应的是变化率,而当输入没有变化时,微分作用输出为零。
微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
图1-1 PID控制系统二、二阶系统数学模型二阶系统方框图如下图所示二阶系统闭环传递函数的标准形式2222)()()(n n n s s s R s C s ωζωω++==Φ (2-1)得出自然频率(或无阻尼振荡频率)Mn T K=ω (2-2) 阻尼比KT M 21=ζ (2-3)令式(2-1)的分母多项式为零,得二阶系统的特征方程0222=++n n s ωζω (2-4)其两个根(闭环极点)为1221-±-=ζωζωn n 、s (2-5)显然,二阶系统的时间响应取决于ζ和n ω这两个参数。
应当指出对于结构和功用不同的二阶系统,ζ和n ω的物理含意是不同的。
图2-2 标准形式二阶系统结构图三、PID 调速系统数学模型PID 控制系统是一种线性控制系统。
使系统的动作缓慢。
Kp可以选负数,这主要是由执行机构、传感器以控制对象
的特性决定的。
如果Kp的符号选择不当对象状态(pv值)就会离控制目标的状态(sv值)越来越远,如果出现这样的情况Kp的符号就一定要取反。
(2) 积分控制Ti对系统性能的影响
积分作用使系统的稳定性下降,Ti小(积分作用强)会使系统不稳定,但
能消除稳态误差,提高系统的控制精度。
(3) 微分控制Td对系统性能的影响
微分作用可以改善动态特性,Td偏大时,超调量较大,调节时间较短。
Td
偏小时,超调量也较大,调节时间也较长。
只有Td合适,才能使超调量较小,
减短调节时间。
PID参数的整定必须考虑在不同时刻三个参数的作用以及相互之间的互联关系。
这几个参数在我们实际做车子上有着很重要的作用,相关的参数对车子的速度,各个硬件最适合的运行速度也不同,不同的速度也会影响到车子的发挥,驱动电机在这一方面的要求很高,所以如果我们设计出符合我们要求的PID调试装置,就可以快速有效地解决这一系列的问题。
2、图形化调试
图形化串口上位机其实就是虚拟示波器,它主要由P C机,应用软件,数据采集系统三个部分组成,如下图所示,P C机主要是用户的工作界面,接受用户指令并以数据或图形方式向用户输出结果;应用软件是虚拟示波器的核心,它在P C机与数据采集系统之间建立了连接,控制数据采集系统对被测模拟量的测量,对采集到的数据进行存储,处理,分析,回放等,数据采集系统是虚拟示波器的数据来源,主要完成现场信号的采集,其关键是要达到高速度,高精度的要求。
另外,在P C机与数据采集系统之间还要设计通信接口。
本文设计的实物示波器是基于MA T LAB平台上完成的。
实物示波器接入的模拟信号,而本设计的虚拟示波器是下位机通过无线串口蓝牙,传到上位机的蓝牙接口,将串口协议中传输过来的数据,通过上位机读取并显示出来。
正常操作是,点击RUN按钮,打开串口接收功能,软件将从串口接收到的
2
数据实时图形化显示。
下位机只要按照如下格式通过串口向上发送数据,上位机即可将接受到的数据显示成为波形。
当下位机持续向上位机放送满足要求的数据时,软件则会将收到的数据显示为如下曲线。
3、图形可视化参数整定
PID 整定口诀:
参数整定找最佳, 从小到大顺序查。
先是比例后积分, 最后再把微分加。
曲线振荡很频繁, 比例度盘要放大。
曲线漂浮绕大弯, 比例度盘往小扳。
曲线偏离回复慢, 积分时间往下降。
曲线波动周期长, 积分时间再加长。
曲线振荡频率快, 先把微分降下来。
动差大来波动慢, 微分时间应加长。
理想曲线两个波, 前高后低四比一。
一看二调多分析, 调节质量不会低。
整定口诀对于初学者来说,其实根本就看不懂,只有从实际整定过程中才能慢慢发觉其中的奥秘。
3
首先整定的是Kp比例项;
Kp =0.1 Kp =0.5
Kp = 1 Kp = 1.5
Kp = 2 Kp =5
红色线:设定速度
黄色线:实际速度
由图形化的上位机可以清晰看到,Kp =0.1时,根本达不到设定的速度;Kp =0.5和1.0时,也偏小,响应速度不够快;Kp = 2.0和5.0时,则偏大,会导致振荡,延长了达到稳定的时间。
所以Kp选择1.5较为合适。
4
然后加入Ki积分项;
Kp = 1.5 , Ki =0.01
Ki =0.1
5
Ki =0.3
由图可以看出Ki项不能加的太大,不然将会引起波形抖动。
所以选择Ki为0.01。
6
最后加入Kd微分项;
Kp = 1.5
Ki =0.01
Kd =5
Kd = 20
7
Kd = 30
Kd =50
有图可知,Kd项的引入可以消除波形的抖动,但如果太大会降低系统的相应速度。
最后得到最合适的参数:Kp = 1.5,Ki =0.01,Kd = 30
8
4、PID算法C语言原代码
typedef struct PID
{
intSetPoint; //设定目标 DesiredValue
longSumError; //误差累计
doubleProportion; //比例常数Proportional Const
doubleIntegral; //积分常数 IntegralConst
doubleDerivative; //微分常数Derivative Const
intLastError; //Error[-1]
intPrevError; //Error[-2]
} PID;
static PID sPID;
static PID *sptr = &sPID;
/
*============================================================= =======
InitializePID Structure PID参数初始化
============================================================= ======*/
void IncPIDInit(void)
{
sptr->SumError= 0;
sptr->LastError= 0; //Error[-1]
sptr->PrevError= 0; //Error[-2]
sptr->Proportion= 0; //比例常数Proportional Const
sptr->Integral= 0; //积分常数IntegralConst
sptr->Derivative= 0; //微分常数Derivative Const
sptr->SetPoint= 0;
}
9
/
*============================================================= ======= 增量式PID计算部分
============================================================= =======*/
int IncPIDCalc(int NextPoint)
{
registerint iError, iIncpid; //当前误差
iError= sptr->SetPoint - NextPoint; //增量计算
iIncpid= sptr->Proportion * iError //E[k]项
-sptr->Integral * sptr->LastError //E[k
1]项
+sptr->Derivative * sptr->PrevError; //E[k
2]项
//存储误差,用于下次计算
sptr->PrevError= sptr->LastError;
sptr->LastError= iError;
//返回增量值
return(iIncpid);
}
5、总结
调试装置的设计会遇到各种各样的问题,硬件随外界环境会不断的出现变化,会干扰我们的调试以及运行结果。
整定出能适应各种环境的参数,必须对每个环境都加以测试,综合得出最合适的参数。
好在图形化的调试整定过程能够快速直观的得出结论。
10。