空间矢量调制PWM算法研究
- 格式:pdf
- 大小:168.07 KB
- 文档页数:4
SVPWM的原理和法则推导和控制算法详细讲解SVPWM(Space Vector Pulse Width Modulation)是一种三相不对称多电平PWM调制技术。
其原理是将三相电压转换为空间矢量信号,通过调制的方式控制逆变器输出电压,以实现对三相电机的控制。
下面将详细介绍SVPWM的原理、法则推导以及控制算法。
一、原理:SVPWM的原理在于将三相电压分解为两相,即垂直于矢量且相互垂直的两个分量,直流坐标分量和交流坐标分量。
其中,直流坐标分量用于产生直流电压,交流坐标分量用于产生交流电压。
通过对直流和交流坐标的调制,可以生成所需的输出电压。
二、法则推导:1.将三相电压写成直流坐标系下的矢量形式:V_dc = V_d - 0.5 * V_a - 0.5 * V_bV_ac = sqrt(3) * (0.5 * V_a - 0.5 * V_b)2. 空间矢量信号通过电源电压和载波进行调制来生成输出电压。
其中,电源电压表示为空间矢量V。
根据配比原则,V_dc和V_ac分别表示空间矢量V沿直流和交流坐标的分量。
V = V_dc + V_ac3.根据法则推导,导出SVPWM的输出电压:V_u = 1/3 * (2 * V_dc + V_ac)V_v = 1/3 * (-V_dc + V_ac)V_w = 1/3 * (-V_dc - V_ac)三、控制算法:1. 设定目标矢量Vs,将其转换为直流坐标系分量V_dc和交流坐标系分量V_ac。
2.计算空间矢量的模长:V_m = sqrt(V_dc^2 + V_ac^2)3.计算空间矢量与各相电压矢量之间的夹角θ:θ = arctan(V_ac / V_dc)4.计算换向周期T和换相周期T1:T=(2*π*N)/ω_eT1=T/6其中,N为极对数,ω_e为电机的角速度。
5.根据目标矢量和夹角θ,确定目标矢量对应的扇区。
6.根据目标矢量和目标矢量对应的扇区,计算SVPWM的换相角度β和占空比:β=(2*π*N*θ)/3D_u = (V_m * cos(β) / V_dc) + 0.5D_v = (V_m * cos(β - (2 * π / 3)) / V_dc) + 0.5D_w=1-D_u-D_v以上步骤即为SVPWM的控制算法。

空间电压矢量控制PWM
空间电压矢量控制PWM(SVPWM)也叫磁通正弦PWM法.它以三相波形整体生成效果为前提,以逼近电机气隙的理想圆形旋转磁场轨迹为目的,用逆变器不同的开关模式所产生的实际磁通去逼近基准圆磁通,由它们的比较结果决定逆变器的开关,形成PWM波形.此法从电动机的角度出发,把逆变器和电机看作一个整体,以内切多边形逼近圆的方式进行控制,使电机获得幅值恒定的圆形磁场(正弦磁通).
具体方法又分为磁通开环式和磁通闭环式.磁通开环法用两个非零矢量和一个零矢量合成一个等效的电压矢量,若采样时间足够小,可合成任意电压矢量.此法输出电压比正弦波调制时提高15%,谐波电流有效值之和接近最小.磁通闭环式引
入磁通反馈,控制磁通的大小和变化的速度.在比较估算磁通和给定磁通后,根据误差决定产生下一个电压矢量,形成PWM波形.这种方法克服了磁通开环法的不足,解决了电机低速时,定子电阻影响大的问题,减小了电机的脉动和噪音.但由于未引入转矩的调节,系统性能没有得到根本性的改善.。

SVPWM的等效算法及SVPWM与SPWM的本质联系一、本文概述随着电力电子技术的快速发展,空间矢量脉宽调制(SVPWM)和正弦脉宽调制(SPWM)作为两种重要的调制策略,在电力转换和控制领域得到了广泛应用。
本文旨在探讨SVPWM的等效算法,并深入揭示SVPWM 与SPWM之间的本质联系。
我们将对SVPWM的基本原理和算法进行详细阐述,包括其空间矢量的概念、合成方法以及脉宽调制的实现过程。
在此基础上,我们将引入SVPWM的等效算法,该算法通过简化计算过程,提高了SVPWM的实时性和效率。
我们将对SPWM的基本原理和算法进行回顾,包括其正弦波调制的原理、实现方法以及优缺点。
通过对比SVPWM和SPWM的调制策略,我们将揭示两者在调制原理、波形质量、电压利用率等方面的本质联系和差异。
本文将通过仿真和实验验证SVPWM的等效算法的有效性,并展示SVPWM和SPWM在实际应用中的性能表现。
通过本文的研究,读者将能够更深入地理解SVPWM和SPWM的调制原理,为电力转换和控制领域的研究和应用提供有益的参考。
二、SVPWM的基本原理与等效算法空间矢量脉宽调制(SVPWM)是一种用于三相电压源型逆变器的先进调制策略。
其基本原理在于,将三相电压视为一个旋转的空间矢量,并通过控制该矢量的旋转速度和方向,实现对输出电压的精确控制。
SVPWM通过在一个控制周期内合成多个基本电压矢量,使得输出电压能够逼近期望的电压矢量,从而提高了电压利用率并降低了谐波含量。
SVPWM的等效算法主要基于伏秒平衡原则,即在一个控制周期内,通过合理地分配各个基本电压矢量的作用时间,使得输出电压的平均值等于期望的电压值。
具体实现时,首先根据期望的电压矢量计算出其在αβ坐标系下的分量,然后根据这些分量确定所需的基本电压矢量及其作用时间。
通过PWM信号控制逆变器的开关状态,实现输出电压的精确控制。
SVPWM与SPWM(正弦脉宽调制)的本质联系在于,它们都是通过控制逆变器的开关状态来生成期望的输出电压波形。




SVPWM算法原理及详解SVPWM(Space Vector Pulse Width Modulation)是一种用于交流电机驱动的高级PWM调制技术。
该技术可以有效地提高三相交流电机的转速控制精度,并降低谐波含量,从而实现高效能的电机驱动控制。
SVPWM基于矢量控制的思想,在空间矢量和时域之间建立起一个映射关系,从而决定三相电压的高低电平。
在SVPWM中,将输入电压看做一个旋转矢量,通过改变矢量的方向和幅值,来实现对电机的控制。
具体来说,SVPWM将电压空间矢量分解为两个分量:直流分量和交流分量,并通过控制这两个分量的比例和相位差来实现对电机的控制。
SVPWM的核心思想是将输入电压矢量按照一个特定的频率进行旋转,并根据电机当前的电角度来确定矢量的方向和幅值。
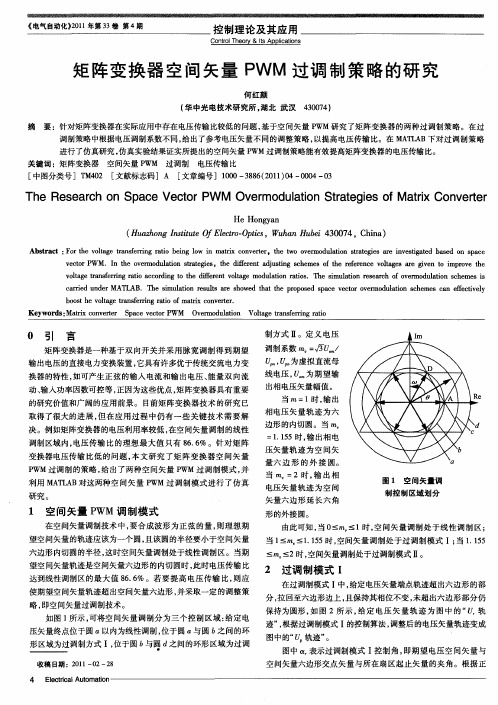
在SVPWM中,输入电压矢量可以分解为六个基本矢量,分别为0度、60度、120度、180度、240度和300度。
这六个基本矢量可以通过变换和组合得到任意方向和幅值的矢量,从而实现对电机的控制。
在SVPWM中,通过改变两个交流分量的比例和相位差来实现对电机的控制。
具体来说,将输入电压矢量分解为一个垂直于交流分量的直流分量和一个平行于交流分量的交流分量。
交流分量决定了电机的转速,而直流分量则决定了电机的转矩。
通过控制这两个分量的比例和相位差,可以实现对电机驱动的精确控制。
SVPWM的优点是具有较好的动态响应性能和高调制精度。
通过调整矢量的方向和幅值,SVPWM可以实现对电机的精确控制,并且可以在不同速度下保持较低的谐波含量。
此外,SVPWM还可以提高电机的功率因数,降低电机的损耗和噪音。
然而,SVPWM也存在一些限制。
首先,SVPWM需要较为复杂的运算,因此对控制器的计算能力要求较高。
其次,SVPWM对电机的参数误差和非线性影响较为敏感,需要进行较多的校正和补偿。
总结来说,SVPWM是一种基于矢量控制思想的高级PWM调制技术,通过改变矢量的方向和幅值来实现对电机的控制。


svpwm计算方式SVPWM计算方式SVPWM,即Space Vector Pulse Width Modulation(空间矢量脉宽调制),是一种常用于交流电机驱动系统中的调制方式。
它通过控制电压矢量的方向和幅值,来实现对电机的精确控制。
在SVPWM计算方式中,通过对三相电压进行合理的分解和计算,可以得到最终的PWM信号,从而实现对电机的精确控制。
SVPWM的计算方式主要包括以下几个步骤:1. 坐标变换:将三相电压变换到静止坐标系(dq坐标系),即将三相电压分解为直轴电压(d轴电压)和交轴电压(q轴电压)。
这一步的目的是简化计算,使得接下来的计算更加方便。
2. 矢量分解:根据坐标变换得到的d轴电压和q轴电压,可以得到电压矢量的幅值和相位。
通常情况下,电压矢量的幅值为恒定值,相位为根据控制要求进行调整。
3. 矢量选择:根据控制要求,选择合适的电压矢量。
在SVPWM中,电压矢量通常有7种选择,分别为零矢量、正矢量和负矢量。
根据控制要求,选择合适的电压矢量。
4. 占空比计算:根据选择的电压矢量,计算占空比。
占空比表示PWM信号的高电平时间与周期时间的比值,通过调整占空比可以控制电机的转速和扭矩。
在SVPWM中,通过计算得到的占空比可以保证电机的转速和扭矩的精确控制。
5. PWM信号生成:根据计算得到的占空比,生成最终的PWM信号。
在SVPWM中,PWM信号一般由6个脉冲信号组成,分别对应电机的A、B、C三相。
通过调整PWM信号的占空比和频率,可以实现对电机的精确控制。
在实际应用中,SVPWM计算方式具有很高的精度和效率。
通过合理选择电压矢量和计算占空比,可以实现对电机的精确控制,同时还可以减小电机的功率损耗和噪音。
因此,SVPWM计算方式广泛应用于各种交流电机驱动系统中。
SVPWM计算方式是一种常用的交流电机调制方式,通过对三相电压的合理分解和计算,可以实现对电机的精确控制。
在实际应用中,SVPWM计算方式具有很高的精度和效率,可以满足各种电机控制的需求。