Automated support for development, maintenance, and testing in the presence of implicit con
- 格式:pdf
- 大小:153.91 KB
- 文档页数:10
MICROSOFT软件许可条款欢迎您使用微软设备健康助手软件本许可条款是Microsoft Corporation(或您所在地的Microsoft Corporation 关联公司)与您之间达成的协议。
请阅读本条款的内容。
本条款适用于上述软件,其中包括您用来接收该软件的媒体(若有)。
本条款也适用于Microsoft为此软件提供的:∙ 更新∙ 补充程序∙ 基于Internet 的服务∙ 支持服务(除非上述各项附带有其他条款)。
如果确实附带有其他条款,则其他条款应适用。
一旦使用该软件,则表明您接受这些条款。
如果您不接受这些条款,请不要下载,安装,或使用该软件。
Microsoft 可能不时在线更新本软件许可条款,您同意其最新版本有效。
如果您遵守这些许可条款,您将具有下列权利:1. 安装和使用权利。
您只可以在您的客户端设备上安装和使用该软件的任意数量的副本。
2. 基于INTERNET 的服务。
Microsoft 随该软件提供基于Internet 的服务,但可能随时更改或取消这些服务。
3. 许可范围。
该软件只授予使用许可,而非出售。
本协议只授予您某些使用该软件的权利。
Microsoft 保留所有其他权利。
除非适用法律给予您更多权利(尽管有此项限制),否则您只能在本协议明示规定的范围内使用该软件。
在按规定使用软件时,您必须遵守软件中的任何技术限制,这些限制只允许您以特定的方式使用软件。
您不可以∙ 绕过该软件中的任何技术限制;∙ 对该软件进行反向工程、反编译或反汇编;尽管有此项限制,但如果适用法律明示允许上述活动,并仅在适用法律明示允许的范围内从事上述活动则不在此限;∙ 制作超过本协议所规定或适用法律(尽管已有本协议的这一限制)所允许数量的软件副本;∙ 发布该软件以便他人复制;∙ 出租、租赁或出借该软件;∙ 以任何形式分发该软件或其任何更新或补充程序;∙ 向任何第三方转让该软件或本协议;或∙ 使用该软件提供商业软件主机服务。

Version InformationProduct Name Microsoft® Wireless Optical Desktop 4000Product Version Microsoft Wireless Optical Desktop 4000 v1.0Keyboard Version Microsoft Wireless Comfort Keyboard 1.0aMouse Version Microsoft Wireless Optical Mouse 2.0aReceiver Version Microsoft Wireless Optical Desktop Receiver 3.0aProduct DimensionsKeyboard Length19.2 inches (487 millimeters)Keyboard Width9.69 inches (246 millimeters) includes palm restKeyboard Depth/Height 2.24 inches (57 millimeters) with tilt legs extendedKeyboard Weight34.3 ounces (971 grams) includes 2 AA alkaline batteries; typical battery weight may varyMouse Length 4.82 inches (123 millimeters)Mouse Width 2.89 inches (73.5 millimeters)Mouse Depth/Height 1.69 inches (43.0 millimeters)Mouse Weight 4.81 ounces (136 grams) includes 2 AA alkaline batteries; typical battery weight may varyReceiver Length 4.72 inches (120 millimeters)Receiver Width 3.15 inches (80.0 millimeters)Receiver Depth/Height 1.13 inches (28.7 millimeters)Receiver Weight 5.92 ounces (168 grams)Receiver Cable Length60 inches + 6/-0 inches (1524 millimeters +152/-0 millimeters)Compatibility and LocalizationInterface USB and PS/2 CompatibleOperating Systems• Microsoft Windows® XP Professional/Home Edition/Media Center Edition/Tablet PC Edition/Windows 2000• Macintosh Mac OS X versions 10.1.x-10.3.x (excludes Mac OS X version 10.0)Top-line System Requirements For a Microsoft Windows-based PC:• Microsoft Windows XP Professional/Home Edition/Media Center Edition/Tablet PC Edition/Windows 2000• Pentium 233 MHz or higher processor• 128 MB of RAM• 60 MB of available hard disk space (install 100 MB free)• USB port or PS/2 port• CD driveFor a Macintosh PC:• Macintosh Mac OS X versions 10.1.x-10.3.x (excludes Mac OS X version 10.0)• 30 MB of available hard disk space• USB port• CD driveCompatibility Logos• Designed for Microsoft Windows XP and Windows 2000• Mac logo• Certified USB logoSoftware Version Microsoft IntelliPoint software, version 5.3 or higher, is required in order to enjoy full product functionality (including Tilt Wheel Technology, Smart Receiver Technology, and button programmability features). Microsoft IntelliType Pro, version 5.3 orhigher, is required in order to enjoy full product functionality (including all Zoom Slider, Hot Key, and Media Key features).Internet Hot Keys are supported for use with:• Windows-based PC: Microsoft Internet Explorer version 5.0 or later; MSN® Explorer versions 7.0 and 8.0; NetscapeNavigator versions 6.1, 6.2, and 7.0; and AOL versions 7.0, 8.0, and 9.0• Macintosh PC: Microsoft Internet Explorer for the Macintosh version 5.0 or later and Netscape Navigator version 6.1 or 7.0Multimedia Hot Keys are supported for use with:• Windows-based PC: Versions of Microsoft CD Player, Microsoft Deluxe CD, Microsoft Windows Media® Player, and certainversions of other popular media players and browsers• Macintosh: iTunesSleep Hot Key functionality is available if your system supports power management and has it enabled, and if all peripheralsare compatible with power management.Software Localization For a Microsoft Windows-based PC:Microsoft IntelliPoint and IntelliType Pro software may be installed in Simplified Chinese, Traditional Chinese, English,French, German, Italian, Japanese, Korean, Brazilian Portuguese, Iberian Portuguese, or Spanish. If available, standardsetup will install the software in the default OS language. Otherwise, the English language version will be installed.For a Macintosh PC:Microsoft IntelliPoint for Mac and IntelliType Pro for Mac will install in English, French, German, Italian, Japanese, BrazilianPortuguese, and Spanish. User settings for OS language preference determine which localized version of the software isdisplayed. In the event that OS language preferences are not supported, the English language versions of IntelliPoint for Macand IntelliType Pro for Mac will be displayed.Keyboard Localization Available language sets will vary by product and sales channel.104 key configuration: Chinese (Traditional), English (North America), Greek, International English (EURO), andInternational English (ROW)105 key configuration: Danish, English (UK), Finnish/Swedish, French (Belgium), French (Canada), French (France),German (Germany), German (Switzerland/Belgium), Hebrew, Italian, Norwegian, Portuguese (Portugal), Spanish (EURO),and Spanish (Latin America)106 key configuration: Korean109 key configuration: Chinese (Simplified)and JapaneseTracking TechnologyMouse Tracking System Microsoft-proprietary optical technologyImaging Rate Dynamically adaptable to 6000 frames per secondX-Y Resolution400 points per inch (15.75 points per millimeter)Tracking Speed Up to 36 inches (914 millimeters) per secondWireless TechnologyWireless Platform27 MHz Radio Frequency (RF)Wireless Channels• Keyboard: 27.095 MHz channel 0, 27.195 MHz channel 1• Mouse: 27.145 MHz Mouse channel 1Wireless IDs• Keyboard: Over 65,000 random identification codes• Mouse: Over 65,000 random identification codesWireless Range 6 feet (1.83 meters) typical. Note: RF range is affected by many factors, such as nearby metallic objects and relativepositioning of the keyboard, mouse, and receiver.Product Feature PerformanceQWERTY Key Life1,000,000 actuations per keyZoom Slider Life250,000 actuations in either directionHot Key Features Web/Home, Calendar, Mail, Messenger, My Documents, Show My Favorites, My Favorites 1, My Favorites 2, My Favorites 3, My Favorites 4, My Favorites 5, Calculator, Log Off, and SleepHot Key Life500,000 actuations per keyMedia Key Features Mute, Volume -, Volume +, Play/Pause, Stop (Media), Previous Track, and Next TrackMedia Key Life500,000 actuations per keyEnhanced Function Key Features Help, Undo, Redo, New, Open, Close, Reply, Forward, Send, Spell, Save, and PrintTyping Speed1000 characters per minuteMouse Button Features 3 buttons including scroll wheel buttonRight & Left Button Life1,000,000 actuations at no more than 4 actuations per secondWheel Button Life150,000 actuations at no more than 4 actuations per secondMouse Scrolling Features Tilt wheel enables vertical and horizontal scrollingWheel Vertical Scrolling Life• 100,000 revolutions (away from user)• 100,000 revolutions (towards user)Wheel Horizontal Scrolling Life350,000 actuations per side at no more than 4 actuations per secondStorage Temperature & Humidity-40 °F (-40 °C) to 140 °F (60 °C) at < 5% to 65% relative humidity (non-condensing)Operating Temperature & Humidity14 °F (-10 °C) to 104 °F (40 °C) at <5% to 80% relative humidity (non-condensing)Power RequirementsBattery Type and Quantity• Keyboard: 2 AA alkaline batteries (included)• Mouse: 2 AA alkaline batteries (included)Battery Life• Keyboard: 6 months typical• Mouse: 6 months typicalCertification InformationCountry of Manufacture Keyboard and Receiver: Thailand and Mouse: People's Republic of China (PRC)ISO 9002 Qualified Manufacturer YesFCC ID This device complies with part 15 of the FCC Rules and Industry Canada RSS-210. Operation is subject to the following two conditions: (1) This device may not cause harmful interference, and (2) this device must accept any interference received,including interference that may cause undesired operation. Tested to comply with FCC standards. For home and office use.Model numbers: 1027, Wireless Optical Comfort Keyboard 1.0; 1008, Wireless Optical Mouse 2.0; and 1029, WirelessOptical Desktop Receiver 3.0. FCC IDs: C3K1027 and C3K1008.Agency and Regulatory Approvals• FCC Declaration of Conformity (USA)• UL and cUL Listed Accessory (USA and Canada)• RSS-210 and ICES-003 data on file (Canada)• TUV-T Certificate (European Union)• R&TTE Declaration of Conformity, Safety and EMC (European Union)• GOST Certificate (Russia)• VCCI Certificate (Japan)• ACA/MED Declaration of Conformity (Australia and New Zealand)• BSMI and DGT Certificates (Taiwan)• MIC Certificate (Korea)• CMII Certificate (China)• NOM Certificates (Mexico)• SABS Certificate (South Africa)• CB Scheme Certificate (International)• WHQL (International) ID: 890572Results stated herein are based on internal Microsoft testing. Individual results and performance may vary. Any device images shown are not actual size. This document is provided for informational purposes only and is subject to change without notice. Microsoft makes no warranty, express or implied, with this document or the information contained herein. Review any public use or publications of any data herein with your local legal counsel.©2006 Microsoft Corporation. All rights reserved. Microsoft, the IntelliEye logo, IntelliMouse, MSN, the Laser Technology logo, the Optical Technology logo, Natural, Windows, and Windows NT are either registered trademarks or trademarks of Microsoft Corporation in the U.S. and/or other countries. Mac and the Mac logo are trademarks of Apple Computer, Inc., registered in the U.S. and/or other countries. The names of actual companies and products mentioned herein may be trademarks of their respective owners.。


Version InformationProduct Version Microsoft® LifeCam™NX-6000Webcam Version Microsoft LifeCam NX-6000 v1.0Product DimensionsWebcam Length 2.69 inches (68.4 millimeters)Webcam Width 1.26 inches (32.0 millimeters)Webcam Depth/Height0.99 inches (25.2 millimeters)Webcam Weight 1.92 ounces (54 grams)Webcam Cable Length24.0 inches (610 millimeters)Compatibility and LocalizationInterface High-speed USB compatible with the USB 2.0 specificationOperating Systems Microsoft Windows® Vista™, Windows XP Pro/Home/Media Center Edition/Tablet PC Edition withService Pack 2 or higher/XP Pro x64 Edition with Service Pack 1 or higherTop-line System Requirements• Microsoft Windows Vista, Windows XP Pro/Home/Media Center Edition/Tablet PC Edition withService Pack 2 or higher/XP Pro x64 Edition with Service Pack 1 or higher• Pentium III 700 MHz (Pentium 4 2.4 GHz recommended) or higher• 128 MB RAM (256 MB RAM recommended) or higher• 200 MB hard drive space• Display adapter capable of 800 x 600 resolution or higher• 16-bit color depth or higher• 2 MB or more video memory• Sound card with speakers or headphones• USB 1.1 (USB 2.0 recommended). USB port 2.0 required for 1.3 MP and above video captureresolution. System without USB 2.0 may achieve 800 x 600 pixel resolution• 4x speed CD drive or faster• Auto Update required for One-Touch Blogging• Internet access requiredInternet functions (post to Windows Live™ Spaces, send in e-mail, video calls), also require:Broadband (cable, DSL, or other) modem. Internet Explorer 6.0 or later browser software required forinstallation; 25 MB hard drive space typically required (users can maintain other default Web browsersafter installation); Access to the Internet via MSN® or another service providerCompatibility Logos• Compatible with Microsoft Windows Vista• Certified USB LogoSoftware Version Microsoft LifeCam software, version 1.2 or higher, is required in order to enjoy full product functionalityincluding Windows Live™ Call, Windows Live Dashboard, One Touch BlogInternet functions (post to MSN® Spaces, send in e-mail, video conversations, etc.) also require:Broadband (cable, DSL, or other) modemInternet Explorer 6.0 or later browser software (recommended; users can maintain other default Webbrowsers after installation)Access to the Internet via MSN or another service provider (a separate fee may be required)The Microsoft LifeCam NX-6000 also works with other instant messaging programs, such as Yahoo!®Messenger and AOL® Instant Messenger™.Software Localization Microsoft Lifecam software version 1.2 may be installed in Simplified Chinese, Traditional Chinese,English, French, German, Italian, Japanese, Korean, Brazilian Portuguese, Iberian Portuguese, orSpanish. If available, standard setup will install the software in the default OS language. Otherwise,the English language version will be installed.Windows Live™ Integration FeaturesVideo Conversation Feature Windows Live Call button delivers one touch access to video conversationCall Button Life10,000 actuationsWebcam Controls & Effects LifeCam Dashboard provides access to animated video special effect features and webcam controls Blogging Feature Add photos to Windows Live Spaces with one mouse clickImaging FeaturesSensor CMOS 2.0 MP sensor technologyResolution• Motion Video: 2 megapixel (1600 x 1190 pixels)• Still Image: 7.6 megapixel (3200 x 2380 pixels*) interpolatedField of View71° diagonal field of viewImaging Features• Digital pan, digital tilt, and 3x digital zoom**• Fixed focus• Automatic image adjustment with manual overwriteProduct Feature PerformanceAudio Features Integrated microphone and noise cancellationMicrophone technology Unidirectional noise cancelling microphoneMounting Features Notebook universal attachment base. Fits screen thickness between 0.28 inches (7 millimeters) and0.59 inches (15 millimeters)Storage Temperature & Humidity-40 °F (-40 °C) to 140 °F (60 °C) at <5% to 65% relative humidity (non-condensing)Operating Temperature & Humidity32° F (0° C) to 104° F (40° C) at <5% to 80% relative humidity (non-condensing)Certification InformationCountry of Manufacture People's Republic of China (PRC)ISO 9001 Qualified Manufacturer YesAgency and Regulatory Marks• FCC Declaration of Conformity (USA)• UL and cUL Listed Accessory (USA and Canada)• ICES-003 data on file (Canada)• CE Declaration of Conformity, Safety and EMC (European Union)• GOST Certificate (Russia)• TUV-T Certificate (European Union)• WEEE (European Union)• VCCI Certificate (Japan)• ACA/MED Declaration of Conformity (Australia and New Zealand)• BSMI Certificate (Taiwan)• MIC Certificate (Korea)• NOM Certificates (Mexico)• CB Scheme Certificate (International)• WHQL (International) ID: PENDING* One megapixel = 1,000,000 pixels. Less resolution available when sending video via instant messaging.** Automatic face tracking, digital pan, digital tilt, and 3x digital zoom are not available when capturing video at 1.3 MP resolution.Results stated herein are based on internal Microsoft testing. Individual results and performance may vary. Any device images shown are not actual size. This document is provided for informational purposes only and is subject to change without notice. Microsoft makes no warranty, express or implied, with this document or the information contained herein. Review any public use or publications of any data herein with your local legal counsel.©2006 Microsoft Corporation. All rights reserved. Microsoft, the IntelliEye logo, IntelliMouse, MSN, LifeCam, LifeChat, the Laser Technology logo, the Messenger Service logo, the Optical Technology logo, Natural, Windows Live, the Windows Live Call logo, the Windows Live logo, the Windows logo, Windows, Windows Media, and Windows Vista are either registered trademarks or trademarks of Microsoft Corporation in the U.S. and/or other countries. Mac and the Mac logo are trademarks of Apple Computer, Inc., registered in the U。
慧谋HiVDP可变数据软件用户手册1.引言非常感谢您使用慧谋可变数据软件HiVDP,在使用之前,请您详细阅读本手册,以便对其性能有深入的了解。
请保存好此手册,将来如果您遇到使用问题时以便参考。
2.软件概述2.1系统介绍慧谋HiVDP可变数据软件是一款强大、专业、易用的可变数据应用软件,是慧谋公司结合大量实践,自主研发而成 。
能轻松实现海量可变文本、 一维码、二维码、防伪二维码、小程序码、三维码、图像及矢量PDF图像的数据处理和输出。
主要功能模块包括模板制作、数据合成、适时预览、拼版输出、 多页面可变数据、PDF助手、生码助手、矢量CMYK四色/专色PDF和PPML输出等。
适用于多种行业领域:商务证卡(员工证卡、名片、胸牌)、个性直邮商函、门票、入场券、促销奖券、邀请函、各种吊牌、物流标签、防伪标签、医药标签、图书管理、包装印刷等。
我们认为设计要由专业的软件做,如AI、Coreldraw、PHOTOSHOP等,内容不变的部分输出PDF作为背景,在HiVDP中直接调用,HiVDP做专业的可变内容输出。
HiVDP的主要功能:简单易用、性价比高、性能卓越完美的PDF工作流程,支持矢量、印刷CMYK、跨平台输出轻松批处理海量可变文本、图像、一维码、二维码,支持矢量输出 2.2 HiVDP特色功能拥有发明专利技术的模板文件,可以用记事本打开编辑,移植性强,节省重复的排版工作,方便拷贝、阅读和修改,利于模板文件的资源共享。
操作简便界面操作简单,采用Word界面输入方式,所做修改随时看到效果,所见即所得,不但可以对整个文本区域的属性进行修改,也可以对文本区域内的任意文本属性进行编辑修改,方便灵活,并适用于可变文本。
强大的文本处理能力支持横排、竖排、空心字、描边、字符旋转、文本横向拉伸等,支持字距、行距调整功能。
文本对象,可针对数据中单个文字进行颜色、字体、大小等设置;也可以对整个文本对象进行颜色、字体、大小以及旋转等操作。
faq 英文案例Sure, I can help with that. Just let me know if you have any specific questions you'd like me to include in the FAQ.Yes, I would like to create an FAQ for a new software product. Can you help me with that?Sure, I can help with that. Just let me know if you have any specific questions you'd like me to include in the FAQ.What is the purpose of the new software product?The new software product is designed to streamline business processes and improve efficiency for our users. It offers a range of features to help with project management, communication, and collaboration.新软件产品的目的是什么?新软件产品旨在简化业务流程,提高用户的效率。
它提供了一系列功能,可帮助项目管理、沟通和协作。
Who is the target audience for the new software product?The target audience for the new software product is small to medium-sized businesses looking to improve their project management and communication processes. It is alsosuitable for teams within larger organizations who are seeking a more efficient way to collaborate and communicate.新软件产品的目标受众是谁?新软件产品的目标受众是希望改善其项目管理和沟通流程的中小型企业。

马波斯软件configurationtool说明马波斯软件configurationtool是一种用于自动化配置管理的工具,可以帮助用户更轻松地管理和配置其应用程序。
该工具可以生成可执行文件,将配置信息包含在文件中,以便在应用程序的不同环境中进行部署和运行。
马波斯软件configurationtool具有多种功能,包括:1. 自动配置管理:该工具可以自动生成配置项和值,并将它们存储在可执行文件中。
这使得用户可以更轻松地管理应用程序的配置,而无需手动编写大量的代码。
2. 配置关联:马波斯软件configurationtool可以识别并关联应用程序的配置项和值,以便将它们与其他配置项和值相关联。
这可以帮助用户更轻松地管理应用程序的配置文件,并实现更复杂的配置关联。
3. 配置转换:马波斯软件configurationtool可以转换配置项和值的格式,以适应不同的应用程序环境和配置需求。
这可以帮助用户更轻松地在不同的应用程序环境中进行配置转换。
4. 配置导出:马波斯软件configurationtool可以导出应用程序的配置信息,以便进行备份或共享。
这可以帮助用户更轻松地管理应用程序的配置,并确保其在不同的环境中保持一致。
除了自动化配置管理之外,马波斯软件configurationtool还可以用于其他应用程序的管理,例如:1. 应用程序部署:该工具可以生成可执行文件,并将它们部署到不同的计算机或服务器上。
这使得用户可以更轻松地管理和配置应用程序的部署环境。
2. 应用程序监控:该工具可以监控应用程序的运行状态和性能,并生成报告和警报。
这使得用户可以更轻松地监控和优化应用程序的性能。
马波斯软件configurationtool是一种功能强大的工具,可以帮助用户更轻松地管理和配置应用程序。
该工具可以生成可执行文件,并将它们部署到不同的环境中,同时也可以用于应用程序的部署、监控和配置管理等方面。

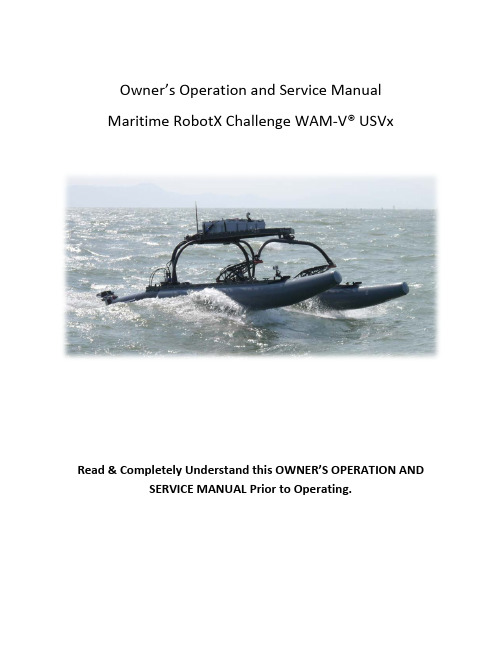
Owner’s Operation and Service ManualMaritime RobotX Challenge WAM-V® USVxRead & Completely Understand this OWNER’S OPERATION AND SERVICE MANUAL Prior to Operating.Table of ContentsSafety Precautions (3)Included With Your Vessel (4)Design Specifications and Construction (5)Major Dimensions and Payload Requirements: (5)Sub Assembly Specifications and Construction (6)Assembly Procedure: (8)Hull Inflation (8)Assembly Steps (10)Disassembly (17)Hinge System and Propulsion Interface (18)Suspension System and Payloads (23)Setting Your Spring Pressure (23)Setting Your Damping Rate (25)Pre-Launch Checklist: (26)Vessel Launching (27)Trailer Launching (27)Side Davit/Hoist Launching (27)Towing: (29)Periodic Maintenance: (30)Inflatable Hull Care, Maintenance & Repair (32)Packing For Shipment (33)Vendors: Component Specifications and Manuals (40)Cane Creek: (40)SKS: (40)Gommorizzo: (40)Safety PrecautionsThis vessel is designed for a maximum payload capacity of 300 lbs (136 kg).DO NOT EXCEED.The inflatable hulls should be inflated to a pressure of 2.0 – 2.2 psi (140 – 150 millibar). Maximum pressure rating is 3.0 psi (205 millibar), DO NOTEXCEED.After operation, deflate both hulls to 1.0 psi (70 millibar) to avoid over pressurization and internal baffle rupture due to temperature changes.CRITICAL: Inspect all push button quick release pins to ensure that the spring loaded retaining ball is functioning properly. Replace immediately if there is any sign of damage or if the internal spring mechanism is notfunctioning properly. Failure to do so may result in catastrophic damage or loss of the vessel.Hoisting: Always lift RobotX WAM-V USVx by securely attaching to all 4 payload tray lift points using hardware and slings that are appropriatelyrated for the load being lifted. See “Side Davit/Hoist Launching” section of this manual for the location of the hoist points on the payload tray. Do not walk beneath the vessel during lifting. Improper use of hoisting hardware, slings, or lift points may result in injury or death.The payload tray has attachment points for securing payloads. Please make sure payloads are always secured prior to operation.Included With Your VesselThe following spare parts and tools are included with your RobotX WAM-V USVx.2 x ¼” diameter, 1.5” long stainless steel quick release locking pin1 x ¼” diameter, 4.0” long stainless steel quick release locking pin1 x ¼” diameter, 1.75” long stainless steel quick release locking pin, with lanyard attached1 x 3/8” diameter, 3.0” long stainless steel quick release locking pin8 x retaining rings for ½” shaft size8 x ¼”-20 set screws w/ nylon patch4 x 8-32 set screws w/ nylon patch1 x wrench set: 3/8” – 1”1 x allen key set w/ vinyl pouch: 11 piece, 0.05” – 3/8”1 x double open ended wrench, 7/16” – 9/16”1 x double open ended wrence, 7/16” – ½”1 x T27 torx drive bit4 x 2500 lb load rated lifting sling, 3’ length6 x 1 ton lifting shackle, 3/8” screw pin1 x 3300 lb load rated high depth shackle1 x West Marine hand operated inflator pump1 x SKS SAM suspension pump2 x replacement fill valves for hypalon hulls1 x Cane Creek DBair shock absorber w/ adjustment tool [shipped separately]2 x Cane Creek DBair shock absorber valve cap w/o-ring [shipped separately]2 x IGUS KSTM-30 pillowblock bearing [shipped separately]1 x IGUS KSTM-GT35 pillowblock bearing [shipped separately]Design Specifications and Construction Major Dimensions and Payload Requirements: Beam: 96” (244 cm) [outside to outside]Overall Hull Length: 154” (391 cm)Ski Length: 112” (284 cm)Hull Diameter: 16.75” (42.6 cm)Payload: 300 lbs. (136 kg) maximumFull Load Displacement: 560 lbs. (255 kg) (estimated)Draft: 6.5” (16.5 cm) (estimated)Primary drawing dimensions in inchesPrimary drawing dimensions in inchesSub Assembly Specifications and Construction1.Payload TrayMaterial and Construction: Riveted tube frame and stress skin construction using 5086 and 6061-T6 series aluminum components anodized to MIL-A-8625 Type III. Rear Arch and Front Arch Assembly bearing surfaces are Delrin and reinforced nylon respectively.Weight: 54.5 lbs (24.7 kg).Primary drawing dimensions in inches2.Rear ArchMaterial and Construction: CNC bent tube construction using 6061-T6 series extruded and machined aluminum components anodized to MIL-A-8625 Type III. Inserts and reinforcements riveted in place.Weight: 33.5 lbs (15.2 kg).3.Front ArchMaterial and Construction: CNC bent tube construction using 6061-T6 series extruded and machined aluminum components anodized to MIL-A-8625 Type III. Inserts and reinforcements riveted in place.Weight: 11 lbs (5.0 kg).4.SuspensionMaterial and Construction: Structurally riveted construction consisting of water-jet cut 6061-T6 aluminum plate and extruded sections. CNC machined mounting brackets for all suspension component attachments. All components anodized to MIL-A-8625 Type III. Shock absorbers provided by Cane Creek feature integrated air spring and damper combination with all stainless steel and anodized aluminum construction. Custom valving optimized for WAM-V suspension dynamics featuring external adjustability of spring and damping rates via Schrader valve and barrel adjusters respectively.Weight: 16.5 lbs (7.5 kg). (each)5.SkiMaterial and Construction: Custom 6061-T6 series aluminum extrusion with water-jet cut and CNC machined mounting brackets and reinforcements. Ski-Can is constructed of rolled and welded 0.080” (2 mm) Aluminum 6061-T6 sheet. Can is attached to Ski extrusion via water-jet cut and bent 5086 Aluminum brackets and structural rivets. All components anodized to MIL-A-8625 Type III.Weight: 42.5 lbs (19.3). (each)6.HullMaterial and Construction: Hypalon/polyester (Orca 866 manufactured by Pellel & Flipo).Weight: 20 lbs (9 kg). (each)Assembly Procedure:Hull InflationThe RobotX WAM-V USVx is equipped with hypalon fabric hulls mounted to a rigid aluminum ski. Your RobotX WAM-V USVx was shipped with hull valves locked open. Hull valves must be unlocked before inflation. To unlock the valves, depress and rotate the green button clockwise until green button extends fully. The hulls must be inflated before assembly. Each hull contains a central baffle separating two independent inflation chambers. To inflate, remove the valve cover by rotating the cover counterclockwise.Insert the hand pump valve and rotate clockwise to lock and seal the pump to the hull valve.Inflate each chamber to 2.0 – 2.2 psi (140 – 150 millibar). Replace valve covers by inserting cover and rotating clockwise until locked. In the event of over inflation, depress the green valve release button until desired pressure is reached.To deflate fully, depress the green release button and rotate clockwise until release valve is locked in the open position. After deflation, rotate green release button counterclockwise to close valve.Assembly Steps1. Clear an 8’ x 14’ (2.4 m x 4.3 m) space on the ground (or trailer) and lay out both hulls roughly80” (2 m) apart (centerline to centerline).2.Remove both foot pins by retracting the ¼” (6.3 mm) locking pin and pulling the pin free fromthe foot clevis. Set foot pin aside.3. Set both rear arch foam wedges over the aft most handle on the top of each ski. Line eachwedge up with the inboard edge of each ski.4. Carefully insert the base of the rear arch into the each foot clevis until the pin hole is aligned.Insert foot pin through both ends of the clevis and lock by inserting the ¼” (6.3 mm) locking pin vertically into the locking side of the foot clevis.5.IMPORTANT: Lay the rear arches back until they are resting on the rear arch foam wedgesinstalled in step 3. Failure to do so will result in damage to the rear arch and/or foot assemblies.6. While holding the front arch in between the forward portion of the hulls, slide the front archclevis over the forward balljoint of the suspension assembly and insert 3/8” (9.5 mm) locking pin.7. Repeat this procedure (6) for the opposite hull, laying the front arch forward after both pins arein place.8.Lift the payload tray in between the two arches. Insert the front balljoint shaft into thepillowblock balljoint mounted in the center of the front arch. Place the balljoint shaft cap on the front of the shaft, and secure with the ¼” (6.3 mm) retaining pin attached to the payload tray by inserting the retaining pin vertically through both the shaft and shaft cap.9.Lift the aft end of the payload tray until it is roughly level with the ground. While holding thetray, rotate the rear arch into place. Secure each arch tube in the C-shaped arch mounts.10.Rotate the plastic clamp so that it makes contact with the inside walls of each arch tube. Insertthe ¼” (6.3 mm) locking pin into the pin guide hole at the aft-most arch mounts, locking the clamp in place.11.Remove and store the rear arch foam wedges.DisassemblyDisassembly of the RobotX WAM-V USVx is conducted in the reverse order from the Assembly procedure. For step by step directions, follow the procedure laid out in the “Assembly Procedure” portion of this manual in reverse.Hinge System and Propulsion InterfaceThe RobotX WAM-V USVx is equipped with a quick release hinge system at the transom of each hull. This system allows easy and secure attachment of various propulsion units, independent of propulsion unit design. Each hinge system is composed of a locking handle, accessible on the upper aft portion of the ski, which controls the extension of a pair of locking pins. These locking pins extend into a pair of hinge tongues, mounted on the hinge tongue plate (show below), which is bolted securely to the propulsion unit.Hinge Tongue Plate AssemblyHinge TonguesBolt this face topropulsion unitHinge Tongue Plate Assembly is locked in place by these pins. Pins extend outward into Hinge Tongues via clockwise rotation of control handle at the top of the hull (see pictures on page 22).Rear View of Assembled UnitRear IsometricView of Assembled UnitUnlocked position ofhandleLocked position ofhandle with retainingpin installedSuspension System and PayloadsThe RobotX WAM-V USVx is equipped with a highly adjustable suspension system. Both the spring rate and damping are adjustable through the Cane Creek DBAir shock absorbers equipped on each hull. The RobotX WAM-V USVx can accommodate payloads up to 300 lbs (136 kg). All payloads should be securely fastened to the payload tray via straps or other load rated fasteners.Setting Your Spring PressureNOTE:When removing the valve cap to your DBAir shock absorbers, ensure that the sealing o-ring stays in the cap body. Replace o-ring immediately if lost or damaged.Due to the variability of the payload and payload weight distribution, suspension air pressure must be adjusted to accommodate various payloads. Air pressure can be adjusted using the SKS SAM Schrader valve hand pump supplied with your vessel. IMPORTANT: This pump is outfitted with a zero loss Schrader valve. Please refer to the SKS SAM pump packaging for instructions on the proper use of this valve. Proper use of this valve is essential to charging your DBAir spring to the desired pressure.Zero loss SchradervalveAir pressureadjustment valvePlease refer to page 19 of the DBAir owner’s manual for instructions on how to pressurize the shock. The DBAir contains an internal negative air spring, so care must be taken to set the suspension pressure accurately. Additional service and adjustment information can be found in the DBAir manual included with your vessel or via the link included in the “Vendors: Component Specifications and Manuals” section of this manual.Port and Starboard suspension pressures must be matched such that there is no front view rotation of the front arch.Setting Your Damping RateThe Cane Creek DBAir shock absorbers allow simple external adjustability of compression and rebound settings for both high and low speed damping. The DBAir dampers on your vessel have been adjusted to the following initial setting: HSC – 2 turns +, LSC – 1 turn +, HSR – maximum +, LSR – maximum +Please refer to the Cane Creek DBAir Tuning Field Guide included with your vessel for information on how to adjust your damper settings. Adjustment tools can be found in the spare parts box included with your vessel.Compression Adjustment Side Rebound Adjustment SidePre-Launch Checklist:All locking pins are properly installed and retaining mechanism is functioning properly.Hulls are inflated to 2.0 – 2.2 psi (140 - 150 millibar).Payload is secured to payload tray.Hinge system is properly greased and in locked position with retaining pin installed correctly.Suspension system is properly charged and greased with Schrader valves and O-rings installed correctly.Suspension system pins are installed correctly with C-Clips in place.All fasteners are tightened fully with nuts in place.Vessel LaunchingTrailer Launching1.Before backing down launch ramp, ensure that all tie-down straps holding the vessel to thetrailer are removed and stowed.2.Reverse tow vehicle down the launch ramp until both hulls are sufficiently submerged to lift thevessel off the trailer deck.3.Push or pull the vessel off the trailer and secure to the dockside.Side Davit/Hoist LaunchingThe RobotX WAM-V USVx is equipped with four (4) hoist point connections on the corners of the payload tray. Additionally, a hoisting bar, lifting straps and shackles are included with your vessel.The hoisting bar is designed such that the center lifting shackle can be moved fore and aft to accommodate the change in vessel center of gravity due to various payloads and propulsion unit configurations. When lifting, be sure to secure all payloads as the boat may tilt depending on shackle location. A properly load rated lifting strap must be secured at each hoist point connection in such a way that the majority of the load through the hoist point is in the vertical direction. An example of proper lifting rigging is shown on the following page.Towing:The RobotX WAM-V USVx is equipped with tow point connections on the front inboard side of each ski (shown below).In order to tow the RobotX WAM-V USVx, a tow bridle must be connected to BOTH tow point connections. Do not attempt to lift the vessel using the tow points.Periodic Maintenance:1.Spray down the boat thoroughly after each use.2.Wash down Cane Creek DBAir shock absorbers with soapy water. Rinse clean.3.Ensure all suspension pins are properly greased. If not, apply fresh marine grease via pinmounted zirc fittings.Apply grease here4.Ensure hinge system is properly greased. If not, apply fresh marine grease via hinge shaftmounted zirc fittings.Apply grease here5.Inspect suspension system C-Clips. Replace if damaged or not seated properly.Replace ifdamaged6.Inspect all quick release retaining pins for proper spring retention mechanism function. Test bytrying to remove each pin without depressing the release button. If the pin comes free, replace immediately.7.Every three months, thoroughly clean both hulls and apply an inflatable hull protectant forhypalon boats.pin to work properly. Replace immediatelyif damaged or seized.Inflatable Hull Care, Maintenance & RepairHulls are made of hypalon fabric. In the unlikely event of damage or puncture, please contact a local inflatable hull service center or manufacturer for repair. Do not attempt to patch the hulls. Every three months, thoroughly clean both hulls and apply an inflatable hull protectant for hypalon boats. This will reduce fading and drying caused by repeated UV exposure.Packing For ShipmentPlease refer to the following instructions when packing your RobotX WAM-V USVx for shipment.y font arch and rear arch into shipping box.2.Insert arch foam supports.3.Place payload tray upside down on 4x4 wooden standoffs, ensuring that the tray is constrainedlaterally and longitudinally.4.Secure the payload tray and arches with a single ratchet strap around the payload tray.5.Wrap ratchet strap handle to prevent scratching and damage to hulls during transit.6.Attach hull protection foam to the payload tray.7.Install front cross brace.8.With hulls deflated and suspension air pressure removed, rest skis in the foam saddles withforward portion resting on the cross brace.IMPORTANT: Ensure that the hull is not pinched when ratcheting down the skis.lifting handle.Secure the rear capture crossbar with a ratchet strap.11.Secure the front capture crossbar with a ratchet strap.12.Check to make sure all components are secure and that suspension systems are deflated enoughfor lid clearance.13.Place lid on shipping box. Be sure to line up the lid properly as indicated by the black paintmarking at the corner of the box14.Secure the lid by locking all fasteners.Vendors: Component Specifications and ManualsHardcopies for all commercial off the shelf components are included with this manual. If hard copies are unavailable, digital copies may be downloaded via the links provided below (if available).Cane Creek:DB Air: /tech-center/suspension/manualsSKS:SAM Pump: See backside of included packaging for instructions on how to use, or contact an SKS representative via /index.php.Gommorizzo:Hulls: http://www.gommorizzo.it/index.asp40。
Product Availability, Localization & Translation Guide for Microsoft Dynamics NAV*) Use of the word country is for convenience only and is not intended to imply sovereignty for any disputed territory that may be mentioned hereinKey Benefits:Country LocalizationsLocalization is the process of adapting software to meet country-specific laws or regulations.Microsoft localizes Microsoft Dynamics NAV to include features and functionality designed to address specific tax, counting or financial reporting requirements for various countries. Features or functionalities that are available in a particular country may not be available in all countries.Please consult your channel partner for details about product features and capabilities. Also consult them and/or your professional advisers to determine whether this software is appropriate for your business needs in a given country.LanguagesTranslation is the process of adapting software or documentation to meet language requirements for a particular country. For a given language, Microsoft may translate some, all or none of the user interface (UI) and documentation for Microsoft Dynamics NAV . Contact your channel partner or the local Microsoft office for more information.Microsoft Dynamics NAV is localized, translated and supported by Microsoft and made generally available in the countries *) andlanguages listed below. To learn more about supported versions of Microsoft Dynamics NAV localized and/or translated by Microsoft, please refer to the product availability table below. In addition to country-specific localizations and/or translations that Microsoft creates, our channel partners may make partner created localizations and/or translations of Microsoft Dynamics NAV available incountries where Microsoft does not provide a localized or translated version. See the Microsoft Dynamics Localization and Translation Overview below for more information on partner-created solutions.1) Details regarding availability of Microsoft Dynamics NAV 2013 will be provided in a future update of this guideMicrosoft Dynamics Localization and Translation OverviewOrganizations doing business in a particular country must comply with country-specific laws, regulations and common business practices to handle their daily business transactions and operations and meet their legal obligations for activities conducted in the country. Microsoft recognizes that non-adherence to these laws and regulations can lead to severe consequences for an organization doing business in that country. As an enterprise resource planning (ERP) solution, Microsoft Dynamics NAV software helps organizations manage their various business processes through its extensible architecture. Microsoft extends the business process functionalityof its Microsoft Dynamics NAV software by developing specific commercial requirements, language, and non-vertical, nationalor international functionality to address specific tax, accountingor financial reporting requirements for countries where Microsoft makes this software generally available. The process of adapting software to meet local laws or requirements is called localization. The process of adapting software to meet language requirements is called translation. Since laws and regulations that affect businesses vary in each country, Microsoft Dynamics NAV software is not supported in terms of localizations, translations, or technical support in all countries. While Microsoft Dynamics NAV software “out-of-the-box” is localized and/or translated to address specific laws and/ or regulations for particular countries, it is not supported in termsof localizations, translations, or technical support in all countries. Features or functionalities that are available in a particular country may not be available in all countries. Rather, we look to our channel partners, who are an important part of our global strategy, to deliver Microsoft Dynamics NAV solutions that help customers meet their compliance obligations. Channel partners may adapt the Microsoft Dynamics NAV software to: • Supplement the base Microsoft Dynamics NAV application by developing functionality to meet specific laws or regulations that are not covered by features provided ”out-of-the-box” (e.g., regulations that are unique to states, provinces, cities, or municipalities in a particular country); or • Create their own localizations and/or translations in countries where Microsoft does not offer a localized and/or translated version of Microsoft Dynamics NAV software. Partner-created solutions are owned, implemented, maintained, and serviced by, or on behalf of, the originating channel partner.Channel Partner-Created Solutions:For additional information about partner-created solutions inyour country, please contact your Microsoft channel partner or local Microsoft office, or utilize the Microsoft Dynamics Marketplace (http://dynamicserp.pinpoint. ) to identify channel partner solutions that might be available in your country.Notice and DisclaimerThis content is provided for information purposes only and is subject to change without notice. It is provided “as is” and is not warranted to be error-free. This information is not intended to constitute tax, accounting, legal or other professional advice or to be used as a substitute for specific advice from your channel partner or a licensed professional. You should not act (or refrain from acting) based on information in this document without obtaining professional advice about your particular facts and circumstances. Microsoft does not make any representation, warranty (express, implied or otherwise) or assurance about the performance or suitability of any localized and/ or translated version of Microsoft Dynamics NAV used outside the country in which Microsoft makes that software generally available, including implied warranties and conditions of merchantability or fitness for a particular purpose. Although Microsoft may refer to its channel partners as “partners”, they are independent entities. There is no partnership, joint venture, agency or franchise relationship or fiduciary duty between Microsoft and its channel partners. Channel partners are solely responsible for any configurations, customizations, localizations and/or translations they create or implement on behalf of customers, including any support or other service they provide to customers for such solutions. Microsoft does not warrant or guarantee partner-created solutions and disclaims any and all liability arising out of any partner-created solution and/or service.。

联想LeapAI开发平台白皮书一、了解联想LeapAI平台1.leapAI平台定义LeapAI是一个同时具备硬件开放平台和软件开放平台的综合性平台。
专属面向开发者及软/硬件服务商,为有开发能力的用户提供一个工业App开发的完整解决方案,特别是降低软件开发人员在硬件开发领域的门槛。
系统采用分布式微服务架构,能够为工业App提供安全、稳定、高效的运行支撑。
灵活的前端框架和丰富的API能力组件,为工业App的开发提供了强有力的手段。
通过LeapAI,开发者可以将工业应用快速上云,并对现有解决方案进行能力扩展,轻松应对工业应用的复杂场景和需求的不断变化。
2.平台架构3.产品规格4.名词解释a)LeapAI 智能API网关用户可以调用LeapAI 智能API 网关进行业务配置,无需自行搭建API网关部署所需要的设备。
根据LeapAI平台提供的帮助文档,用户可快速搭建所需API 网关服务。
b)统一消息队列UCQ消息队列中间件是分布式系统中重要的组件,主要解决应用耦合,异步消息,流量削峰等问题。
实现高性能,高可用,可伸缩和最终一致性架构。
LeapAI平台统一使用的消息队列是Kafka。
c)FlexBroker/API Broker除了提供直接对接厂商API功能,LeapAI平台还提供灵活的代理功能直接调用多个API,以简化开发流程,提高开发效率。
d)HyperHub API访问控制引擎通过HyperHub API控制API的访问权限。
5.产品优势a)一站式开发体验极大提高了工作效率LeapAI平台给开发者提供工业PaaS微服务的调用、组合、封装及来自第三方和开源社区的应用服务及多种开发工具,以便支持开发人员快速实现应用的开发与部署,并在平台上得到发布。
b)分布式微服务架构轻松应对大数据量高并发需求LeapAI平台采用行业最佳实践的Sping Cloud分布式微服务框架,c)对接工业领域成熟解决方案,实现能力扩展对接行业领先厂商的解决方案和能力组件,大大提高特定行业特定场景的APP开发效率。

Artificial intelligence development platformRelease AI computing power, accelerate intelligent evolutionAI&HPCAIStation -Artificial Intelligence PlatformUser DataUtilizationTraining40%→80%2 days →4 hrs.Telecom FinanceMedicalManuf.Trans.Internet Development & TrainingDeployment & InferenceDeployment2 days →5 minDataModelServingLaptopMobileIndustryRobotIoTPyTorch Caffe MxNetPaddlePaddle TensorFlow ImportPre-processing accelerationTraining Visualization Hyper-para. tuningOn-demandAuto sched.OptimizationJupyter WebShell PipelineData mgnt computing resources Dev. ToolsModelTensorFlow ServingTensorRT Inference Server PyTorch Inference ServerServingDeployingDev. Tools PipelineData processing RecommendationsystemCV NLPScenarioOn-demand Auto sched.Optimization"Efficiency" has become a bottleneck restricting the development of enterprise AI businesspycharmjupyterVstudiosublime70%50%70%Data security issuesInefficient collaborative developmentLack of centralized data management Low resource utilizationInconvenient for large-scale trainingDecentralized Resource Management Lack of synergy in R&D, slow business responseR&D lacks a unified processAIStation –Artificial intelligence development platformTensorflow Pytorch Paddle Caffe MXNetAIStation Integrated development platformModel DevelopmentBuild environment Model Debugging Model OptimizationModel Deployment Model Loading Service DeploymentAPI ServiceModel Training Task Queuing Distributed Training Visual AnalysisAI computing resourcesTraining samplesApplication stackCPU GPUNFS BeeGFS HDFSComputing Resource Pooling User Quota management Utilizing GPU usagePool schedulingData accelerationAutomated DDP trainingSSDResource poolData pooldata1data2data3node1node2node3data4data5Dataset managementData pre-loading Cached data managementSolving data IO bottleneck Accelerating large scale dataset transferring and model trainingLow threshold for DDP training Helping developers drive massive computing power to iteratively trainmodelsbatch2batch1batch0Data loadingbatch3BeeGFSwork2GPU serverworker1GPUserverworker0GPUserverwork3GPU ServerAIStation TensorFlowCustomized MPI operatorsHighlighted featuresSSDSSDGPU GPU GPU GPU GPUGPUGPUGPUGPU Cards MIG instancesResource PoolingUser QuotaUser QuotaA I St a t i o n d e ve l o p m e n t P l a t f o r m A rc h i te c t u reP100V100V100sA100A30… …Ethernet ClusterInfiniband ClusterRoCE ClusterStorageNFS 、BeeGFS 、Lustre 、HDFS 、Object StorageLinux OSNVIDIA driver package: GPU, Mallanox NIC, etcOperating SystemHardware ClusterNVIDIAGPU seriesMonitoringSchedulingGPU PluginOperatorKubernetes + dockerNetwork PluginSRIOV PluginMultus CNIData prep.Algorithm prototype TrainingTestResource Enginedata mgmtJupyterimage mgmtwebshell/ssh multi-instance visualizationquota mgmtresource mgmt deployment job workflowmgmt job lifecycleproject mgmtalgorithm mgmtmodel mgmt Report HAMulti-tenant System settingBusiness ManagementAuthenticationAPIsAI Application Development3rd or user-defined system integrationDeployment ModeComputing Nodes Storage :SSD 2T-10TGPU :8*V100Management network Ethernet @ 1/10Gbps IPMIEthernet @ 1GbpsManagement Node Storage size :4T-100TCluster Size (10-80persons )ManagerDeployment Mode (Larger Scale+HA )Storage 100T-200TManagement network Ethernet @ 1/10Gbps IPMIEthernet @ 1Gbps Management Node 1*Main ,2*BackupCluster Size (10-80persons )Computing NodesSSD 2T-10T 8*V100Computing NodesSSD 2T-10T 8*V100Manager...I00G EDR infiniband EDR@100GpsOne-stop service full-cycle management,Easy use for distributed trainingHelping developers drive massive computing powerto iteratively train modelsOne-stop AI Dev. platformAI framework AI ops tools GPU driver & Cuda GPUStandard interface for AI Chips Multiply AI Chips supportedHeterogeneousComprehensive resource using statisticsData security and access control Automatic faulty analysis and solutionsIntelligent maintenance & securityHighlighted featuresAIStationStandard and unifiedManagementPollingSchedulingCPU GPU FPGAASICA100A30A40V100MLU270MLU390Cloud AIC 100•Personal data isolation•Collaborative sharing of public data •Unified data set managementC e n t r a l i z e d d a t a m a n a g e m e n tf a c i l i t a t e c o l l a b o r a t i v e d e v e l o p m e n t •Dataset preloading •Data Affinity Scheduling•Local cache management strategyD a t a c a c h e a c c e l e r a t i o ne f f e c t i v e l y s o l v e I /O b o t t l e n e c k s AIStation –Data Synergy Acceleration•Data access control•Data security sandbox, anti-download •Multiple copies ensure secure data backupS e c u r i t y p o l i c yUser DataTraining SamplesSharing Data(NFS 、HDFS 、BeeGFS 、Cloud Storage )D a t a M a n a g e m e n t :M u l t i -s t o r a g e Sy s t e m•Support “main -node ”storage using mode ;•Unified access and data usage for NFS 、BeeGFS 、HDFS 、Lustre through UI;•Built-in NFS storage supports small file merger and transfer, optimizing the cache efficiency of massive small filesAIStationComputing PoolStorage extension (storage interface 、data exchange )Data accelerationMain storageSSD+BeeGFSNode Storage(NFS )Node Storage(HDFS )Node Storage(Lustre )Data exchangeGPU PoolAIStationUser01UserNcaffeTensorflowmxnetpytorchGPUGPU GPU GPU GPUGPUGPUGPUGPU GPU GPU GPU GPUGPUGPUGPUGPU GPU GPU GPU GPUGPUGPUGPUGPU GPU GPU GPU GPUGPUGPUGPUAIStation –Resource SchedulingR e s o u r c e a l l o c a t i o n m a n a g e m e n tUser GPU resource quota limit User storage quota limitResource partition: target users, resource usageF l e x i b l e r e s o u r c e s c h e d u l i n g•Network topology affinity scheduling •PCIE affinity scheduling•Device type affinity scheduling •GPU fine-grained distributionD y n a m i c s c h e d u l i n g•Allocate computing resources on demand •Automatically released when task completedG P U M a n a g e m e n t :F i n e g r a n u l a r i t y G P U u s i n guser1user2user3user4user2481632123456GPU mem (G )Time (H )user1user2IdleIdle481632123456GPU mem (G )Time (H )GPU sharing scheduling policy based on CUDA to realize single-card GPU resource reuse and greatly improve computing resource utilization.Elastic sharing:Resources are allocated based on the number of tasks to be multiplexed.A single card supports a maximum of 64tasks to be multiplexed.Strict sharing:the GPU memory is isolated and allocated in any granularity (minimum:1GB).and resources are isolated based on thegraphics memory ;Flexible and convenient:user application to achieve "zero intrusion",easy application code migration ;S c h e d u l i n g w i t h M I G8 * A100 GPUsN V I D I A A100M I G s u p p o r t i n gUtilizing GPU usage• A single A100 GPU achieves up to 7x instance partitioning and up to56x performance on 8*A100 GPUs in Inspur NF5488A5;•Allocates appropriate computing power resources to tasks withdifferent load requirements.•Automatic MIG resource pool management, on-demand application,release after use;Convenient operation and maintenance•Set different sizes of pre-configured MIG instance templates.•Standard configuration UI for IT and DevOps team.•Simplify NVIDIA A100 utilization and resource management;56 *MIG instancesRe s o u rc e m a n a g e m e n t :N U M A ba s e d s c h e d u l i n gKubeletResource management PluginInspur-DevicePluginGPUGPU topo scoreGPU resource updateGPU allocatingAIStation SchedulerGPU allocationAutomatically detects the topology of compute nodes and preferentially allocates CPU and GPU resources in the same NUMA group to a container to make full use of the communication bandwidth in the groupAIStation –Integrated AI training frameworkPrivate image library PublicimagelibraryinspurAIimagelibraryAI DevelopmentFrameworkAI Developmentcomponents and toolsGPU Driver anddevelopment libraryGPU computingresources◆Te n s o r f l o w,P y t o r c h,P a d d l e,C a f f e,M X N e t◆B u i l d a p r i v a t e w a r e h o u s e t o m a n a g et h e A I a p p l i c a t i o n s t a c k◆S u p p o r t i m a g e c r e a t i o n a n d e x t e r n a li m p o r t◆S u p p o r t o p e n s o u r c e r e p o s i t o r i e s s u c ha s N G C a n d D o c k e r H u b◆B u i l t-i n m a i n s t r e a m d e v e l o p m e n t t o o l sa n d s u p p o r t d o c k i n g w i t h l o c a l I D E•Built-in Jupyter and Shell tools •Support docking with local IDE •Support command line operationQuickly enterdevelopment mode•Allocate computing resources on demand•Quick creation through the interface•Rapid Copy Development EnvironmentRapid build Model Development Environment•Life cycle management •Real-time monitoring of resource performance•One-click submission of training tasksCentralized management of development environmentQuickly build development environment, focus on model developmentD e ve l o p m e n t P l a t f o r mJupyterWebShell本地IDEDevelopment PlatformDev. Platform StatusDevelopment environment instancemonitoring The development environment saves the imageS e c o n d l e v e l b u i l d•On –demand GPU ;•T ensorflow/MXNet/Pytorch/Caffe ;•Single-GPU, multi-GPU, distributed training ;•Flexible adjustment of resources on demand decouples the binding of runtime environment and computing power ;I n t e r a c t i v e m o d e l i n g •Jupyter / WebShell / IDE V i s u a l i z a t i o nT ensorBoard / Visdom / NetscopeF u l l c y c l e m a n a g e m e n t S t a t u smonitoring/Performance monitoring/Port password memoryImage save/copy expansion/start/delete etcVisualizationTensorboardVisdom NetscopeEnhanced affinity scheduling, optimized distributed scheduling strategy, multi-GPU training acceleration ratio can reach more than 90%.Optimized most of the code based on open source;Fixed a bug where workers and launchers could not start at the same time;Task status is more detailed.•Supports distributed training for mainstream frameworks•Provides one-page submission and command line submission of training tasks.M u l t i p l e w a y s t o s u p p o r t d i s t r i b u t e dQ u i c k s t a r t d i s t r i b u t i o nI m p r o v e c o m p u t i n g p e r f o r m a n c eDistributed task scheduling to speed up model trainingAIStation –Training ManagementAIStation –Resource MonitoringO v e r a l l M o n i t o r i n g•Usage status of cluster resources such as GPU, CPU, and storage •Computing node health and performance•User task status and resource usageR e s o u r c e U s a g e St a t i s t i c s•Cluster-level resource usage statistics•Cluster-level task scale statistics•User-level resource usage statistics•User-level task scale statisticsS y s t e m A l a r m•hardware malfunction•System health status•Computing resource utilizationM u l t i -te n a n t M a n a g e m e n tAIStationUserUser2User group1User group2Kubernetes Namespace1Namespace2Cluster resource ☐Supports an administrator -Tenant administrator -Common User organization structure. Tenant administrators can conveniently manage user members and services in user groups, while platformadministrators can restrict access to and use of resources and data in user groups.☐User authentication: LDAP as user authentication system, supporting third-party LDAP/NIS systems.☐Resource quotas control for users and user groups using K8S namespace.☐User operations: Users can be added, logged out, removed, and reset passwords in batches. Users can be enabled or disabled to download data and schedule urgent tasks.I n t e l l i g e n t p l a t f o r m o p e r a t i o n a n d m a i n t e n a n c eIntelligent diagnosis and recovery tool•Based on the existing cluster monitoring, alarm and statistics functions, the operation monitoring component is removed to support independent deployment and use;•Health monitoring: Obtain the status and list display (monitoring information and abnormal events display) of components (micro-services and NFS).•Abnormal repair: Based on the operation and maintenance experience of AIStation, automatic or manual repair of the sorted events such as interface timeout and service abnormalities (microservice restart and NFS remount);Intelligent fault toleranceSupports active and standby management node health monitoring, HA status monitoring, and smooth switchover between active and standby management nodes without affecting services. Monitors alarms forabnormal computenode resource usage toensure the smoothrunning of computenodes.In the event of a systemfailure, the training taskautomatically startssmooth migrationwithin 30 secondsMonitor the status ofkey services andabnormal warning toensure the smoothoperation of user coreservices.M a n a g e m e n t n o d e h i g h l y a v a i l a b l e C o m p u t i n g n o d eF a u l t t o l e r a n c eC r i t i c a l s e r v i c e sf a u l t t o l e r a n tTr a i n i n g m i s s i o nf a u l t t o l e r a n c eN o r t h b o u n d i n t e r f a c e•Secure, flexible, extensible northbound interface based on REST APIs.AIStationQuery URL Status Usages Performance status logs performance resultsReturn URL resource framework scripts dataset environment Login info performance resource framework dataset Return URL Query URL Query URL Return URL monitordeveloping training Computing resourcesDatasets Applications Caffe TensorFlow Pytorch Keras MXNet theanodata1data2data3data4data5AIStation product featuresFull AI business process support Integrated cluster management Efficient computing resource scheduling Data caching strategy reliable security mechanismsUse Case :Automatic driveSolutions:•Increasing computing cluster resource utilization by 30% with efficient scheduler.•One-stop service full-cycle management,streamlined deployments.•Computing support, data management.Background :•Widely serving the commercial vehicle and passenger vehiclefront loading market. •The company provides ADAS and ADS system products andsolutions, as well as high-performance intelligent visualperception system products required for intelligent driving.U s e C a s e :c o m m u n i c a t i o n s te c h n o l o g y c o m pa n y•Quick deployment and distributed •GPU pooling •Huge files reading and training optimizationBackground•HD video conference and mobile conference are provided,and voice recognition and visual processing are the main scenarios.•Increased scale of sample data,distributed training deployment and management,a unified AI development platform is required to support the rapid development of service.ProblemsSolutions •Increasing size of dataset (~1.5T), distributed training;•GPU resource allocating automatically ;•Efficient and optimized management for the huge set of small files ;Use Case: Build One-Stop AI Workflow for Largest Excavator Manufacturer Revenue 15.7B$ExcavatorsPer Year 100,000+Factories 30+AIStation built one-stop AI workflow to connect cloud, edge,and localclusters; support 75 production systems.API Calls Per day 25 M QoS 0missper 10M calls Model Dev Cycle 2 weeks -> 3days Use AI to automate 90% production lines, double production capacity.SANY HEAVY INDUSTRY CO., LTDSANY CloudAIStationModel Dev &Training Inference ServiceSensor Data Data Download Realtime work condition analysis Inference API invoke Training Cluster Inference ClusterTraining Jobs InferenceServices200 * 5280M5 800 * T4, inference; 40* 5468M5 320 * V100, training。

驱动技术\驱动自动化\系统集成\服务MOVITRAC® B操作手册02/2008版本16602250 / ZH操作手册 – MOVITRAC ® B31.1安全提示的组成 (5)1.2质保承诺 (5)1.3质保范围 (5)2安全提示 (6)2.1概述 (6)2.2目标组 (6)2.3按规定使用 (6)2.4运输和仓储 (7)2.5安装 (7)2.6电气连接 (7)2.7安全断开 (7)2.8操作 (7)3设备结构 (8)3.1规格0XS / 0S / 0L (8)3.2规格1 / 2S / 2 (9)3.3规格3 (10)3.4规格4 / 5 (11)3.5型号描述/铭牌 (12)4安装 (13)4.1安装提示 (13)4.2选件功能部件的安装 (17)4.3符合UL 规定的安装 (21)4.4供货范围和安装附包 (22)4.5冷却板的安装 (27)4.6EMC 电容器的关闭(只针对规格0) (27)4.7接线电路图 (29)4.8热传感器TF 和双金属开关TH (30)4.9制动电阻BW.. / BW..-T / BW..-P 到X3 / X2的连接 (30)4.10制动整流块的连接 (31)4.11FSC11B / FIO11B 的安装 (32)4.12额定值调节器MBG11A 的安装 (37)5调试 (38)5.1调试简述 (38)5.2调试的一般提示 (39)5.3准备工作和辅助工具 (40)5.4选件操作面板FBG11B (41)5.5操作面板FBG11B 的基本操作 (42)5.6手动操作FBG11B 额定值调节器 (44)5.7外部额定值设置 (45)5.8通过FBG11B 操作面板进行调试 (46)5.9通过DBG60B 进行调试 (48)5.10使用计算机和MOVITOOLS ® MotionStudio 进行调试 (54)5.11额定值调节器MBG11A 的调试 (54)5.12泵机、风扇和非SEW 电机的调试 (55)5.13电机的启动 (56)5.14参数表 (58)4操作手册 – MOVITRAC ®B6.1数据拷贝 (68)6.2返回编码(r-19 ~ r-38) (69)6.3状态显示 (70)6.4设备状态编码 (71)6.5操作面板DBG60B (72)7服务/故障列表 (76)7.1设备信息 (76)7.2故障列表 (F-00 ~ F-113) (78)7.3SEW 电子服务部 (80)7.4长期存放 (81)8技术参数 (82)8.1CE 标志、UL 认证和C-Tick (82)8.2一般技术参数 (83)8.3MOVITRAC ® B 电子数据 (84)8.4MOVITRAC ® B 技术参数 (86)8.5正面选件操作面板FBG11B (105)8.6通讯模块FSC11B (106)8.7模拟量模块FIO11B....................................................................................107联系地址一览表...........................................................................................................1089关键词目录. (116)1重要提示1.1安全提示的组成本操作手册内的安全提示组成如下:1.2质保承诺遵守操作手册是确保设备正常运行和履行质保承诺的前提条件。
天舟货运飞船空间试验平台设计雷剑宇,贾东永,白明生,梁建辉,方㊀方(中国空间技术研究院,北京100094)摘要:天舟货运飞船充分挖掘自身资源作为空间试验平台,支持多种类型的科学技术试验和应用项目,具有频度高㊁成本低㊁能力强和适应性好等特点㊂针对试验载荷状态新㊁接口类型多㊁研制进度不同步等适应性难题,采用标准化㊁模块化方法,设计了标准接口和公用支持平台,提出了平台总体与载荷方联合设计试验项目的全新模式,研制了等效认证平台,简化了接口匹配性测试环节㊂已完成微纳星释放㊁空间环境探测等15项在轨试验,取得了良好的综合效益㊂关键词:天舟货运飞船;空间试验平台;标准接口;等效认证平台中图分类号:V474.3㊀文献标识码:A㊀文章编号:1674-5825(2022)06-0801-08收稿日期:2022-03-09;修回日期:2022-09-10基金项目:国家重大科技专项(装航ʌ2012ɔ65号)第一作者:雷剑宇,男,博士,高级工程师,研究方向为载人航天器总体设计㊂E-mai:lLeijianyu28@Design of Space Test Platform Based on Tianzhou Cargo SpacecraftLEI Jianyu,JIA Dongyong,BAI Mingsheng,LIANG Jianhui,FANG Fang(China Academy of Space Technology,Beijing 100094,China)Abstract :Tianzhou cargo spacecraft(TZ)is an important part of China s manned space project.Taking advantage of its own resources as a space test platform,TZ can support various types of sci-ence and technology test and application projects,with high frequency,low cost,strong ability and good adaptability.To solve the adaptability problems such as new test load state,multiple interface types,and unsynchronized development progress,a standardized and modular method was used todesign a standard interface and a common support platform.A new model of joint design of test pro-jects by the platform and the payload developer was proposed.An equivalent authentication platform was developed to simplify the interface matching test link.Fifteen in-orbit tests including micro-nanosatellite release and space environment detection was completed and good comprehensive benefits were achieved.Key words :Tianzhou cargo spacecraft;space test platform;standard interface;equivalent authenti-cation platform1㊀引言㊀㊀货运飞船是为空间站服务的空间物资运输载人航天器,旨在通过运输食物㊁推进剂和其他物资来支持空间站的建造与运行,并携带空间站重要货物返回地面[1]㊂1978年1月,苏联发射了第一艘进步号货运飞船;2008年3月,ESA 发射第一艘自动转移飞行器(Automated Transfer Vehicle,ATV);2009年9月,日本H2转移飞行器(H-IITransfer Vehicle,HTV)成功首飞㊂借助NASA 商业轨道运输计划(Commercial Orbital Transporta-tion Services,COTS)和商业乘员发展计划(Com-mercial Crew Development,CCDev),SpaceX 公司和轨道科学公司先后发射了龙货运飞船和天鹅座货运飞船[2]㊂由于货运飞船属于服务型载人航天器,平台第28卷㊀第6期2022年㊀12月㊀㊀㊀㊀㊀㊀㊀㊀㊀载㊀人㊀航㊀天Manned Spaceflight㊀㊀㊀㊀㊀㊀㊀㊀㊀Vol.28㊀No.6Dec.2022功能强大,安全性可靠性高,在完成货运主任务的同时,具备开展空间试验的先天优势㊂龙飞船设计之初即考虑空间试验功能,并设计有DragonLab版本,任务中多次携带小白鼠研究生物长期在轨生理效应,并进行了云气溶胶传输系统实验[3]㊂2020年12月加强版龙飞船发射,空间和供电能力提升,使得整个任务期间都可以搭载科学载荷,成为了国际空间站的扩展实验室[2]㊂天鹅座的服务舱专门为微纳卫星留出了一个搭载区域,于2017年㊁2019年和2022年分3次释放了23颗立方星和100颗皮卫星[4-5],并多次开展大型航天器火灾机理在轨试验[6-7]㊂HTV完成了空间碎片清理电动力绳系拖曳装置在轨试验[8-10],也在规划发展返回版本[11-12]㊂进步号同样作为科学实验平台,开展了系列微重力空间试验[13-14]㊂天舟货运飞船是中国载人航天工程的重要组成部分,瞄准国际领先这一核心目标,打造出的运输效能高㊁任务范围广㊁自主能力强的货运飞船,在满足空间货物运输主任务的同时,具备了多维度在轨服务拓展能力[15-16]㊂2017年4月20日天舟一号成功发射,2017年9月22日天舟一号圆满完成了空间实验室阶段收官任务㊂天舟二号㊁天舟三号于2021年5月和9月成功入轨,均采用全相位㊁全自主快速交会对接方式与核心舱后向端口对接,同时停靠空间站核心舱,运行状态良好㊂天舟货运飞船上行能力达到7t,可以根据任务要求调整货物配比,试验载荷搭载量大,货物舱舱内和舱外均可安装载荷,可支持试验领域广㊂平台采用中继为主的通信体制和标准化以太网协议,支持试验数据㊁图像高速实时下行;可为试验载荷提供1kW供电支持㊂完成货运主任务,脱离空间站后,天舟货运飞船独立飞行,可利用剩余推进剂配合试验进行轨道机动和姿态调整,适应轨道高度范围200~500km,任务约束少,便于试验规划,对空间站运行影响小㊂空间站阶段,天舟货运飞船以每年1~2艘频度发射,具备成为常态化试验平台的优势㊂2021年11月24日,中国载人航天工程办公室发布了‘关于征集通过天舟系列货运飞船搭载科学技术试(实)验和应用项目的机会公告“[17],用以充分利用天舟货运飞船资源,发挥载人航天工程综合效益,促进科学技术创新研究和航天高科技人才培养㊂同时,作为国际合作交流的窗口,可为国外科研院所联合国内研究机构㊁院校联合开展科学试(实)验提供平台㊂本文主要介绍货运飞船试验平台设计㊁可以支持的试验方向㊁试验支持接口设计㊁搭载流程及接口认证设计㊂2㊀货运飞船总体设计㊀㊀通过载人航天工程第一步和第二步一阶段的实施,中国已初步建成功能完备的神舟飞船天地往返运输系统,能满足近地载人航天任务需求㊂为适应中国空间站阶段物资运输以及推进剂在轨补加需求,需建造空间物资运输专用系统 货运飞船㊂2012年,货运飞船正式立项,命名为天舟,明确了天舟货运飞船需要具备的物资上行运输㊁废弃物资下行㊁支持组合体姿轨控㊁空间应用和技术试验支持等四大任务功能㊂2.1㊀型谱规划㊀㊀货运飞船采用模块化㊁通用化㊁组合化设计方案,形成了全密封㊁半开放㊁全开放货运飞船型谱(图1),解决了未来空间站舱内㊁舱外货物特别是大型货物上行的难题,研制出具有中国特色的国际首型多功能货运飞船[15]㊂图1㊀天舟货运飞船型谱Fig.1㊀Three configurations of TZ cargo spaceship按照工程总体飞行任务规划,空间站关键技术验证及建造阶段将发射TZ-2至TZ-5,共4艘货运飞船,均为全密封状态㊂空间站运营期间,适时研制半开放㊁全开放货运飞船,大型试验载荷支持能力将得以大幅提升㊂本文主要介绍全密封货运飞船的空间试验平台设计㊂2.2㊀基本构型㊀㊀货运飞船为两舱构型,由货物舱和推进舱组成㊂货物舱前锥段及柱段为密封段,后锥段为非密封段㊂推进舱为柱状构形的非密封金属结构㊂整船长10.65m,舱体最大直径为Φ3.35m,208载人航天第28卷最大起飞重量为13.5t,最大货物上行能力为7t,推进剂补加能力2.5t,如图2所示㊂图2㊀货运飞船构型Fig.2㊀Configuration of the Tianzhou cargo spaceship1)货物舱㊂如图3所示,货物舱由前锥段㊁柱段㊁后锥段组成㊂货物舱柱段是整船直径最大的区域,其最大外径为Φ3.35m,长为4m㊂前锥段㊁柱段为整体焊接的金属壁板结构㊂图3㊀货物舱构型Fig.3㊀Configuration of pressurized cargo cabin2)推进舱㊂推进舱为能源和动力舱,主要布置太阳电池翼㊁电池组等能源系统设备,贮箱㊁气瓶等推进补加设备和发动机组㊂推进舱为柱状构形的非密封金属结构,外径为Φ2.776m,高度为3.2m,如图4所示㊂推进舱后端框通过包带与运载火箭连接㊂2.3㊀通信㊀㊀以天基测控通信为主,上升段㊁交会对接段和末期离轨段等关键时段配以陆基测控支持㊂天地跟踪测轨采用USB 链路㊁窄波束中继S 链路㊁BD-GPS 导航链路㊂交会对接自主导航定位利用BD㊁GPS 和GLONASS 星座信号实现㊂天基测控通信利用中继卫星系统,通过中继终端实现,配置S /Ka 双频段中继终端,同时设计了宽波束中继S 终端作为备份手段,提高入轨初期测控覆盖率以及对姿态变化较大或故障情况下的测控适应能力㊂陆基测控通信采用USB测控图4㊀推进舱构型Fig.4㊀Configuration of the propulsion module体制,通过S 波段应答机和S 波段数传机实现㊂采用天地一体化网络通信系统实现高速数据(包括图像㊁试验数据等)下行[18]㊂2.4㊀姿轨控㊀㊀针对短期自主飞行㊁长期停靠的需求,采用纯喷气姿轨控模式㊂使用光纤和二浮陀螺㊁星敏㊁红外地敏多种测量方式完成飞行姿态确定㊂共配置32台姿控和4台490N 轨控发动机,提供交会对接平移和姿态控制冲量,具备了对上行物资动态调配引起的质心3.2~5.7m 大范围适应能力㊂3㊀试验平台设计3.1㊀试验平台优势㊀㊀天舟货运飞船除空间物资运输主任务之外,可为试验载荷提供基本的机械安装㊁供电和信息接口支持㊂完成货运任务撤离空间站至再入销毁,可独立飞行3个月,期间利用平台剩余资源支持开展各类技术试验,具有如下优势:1)频度高㊂空间站阶段,天舟货运飞船将以每年1~2艘的频度执行补给任务㊂2)成本低㊂天舟货运飞船起飞重量为13.5t,单次任务可以运送7t 货物,每次任务可余出300kg 左右重量,用于上行试验载荷㊂平台推进剂消耗考虑了极端工况以及故障应急,任务末期往往超过200kg 剩余,再入前可以充分利用此部分推进剂开展技术试验㊂试验搭载任务均使用平台剩余上行重量和富余推进剂,不影响货运主任务,且在火箭运载能力范围内㊂308第6期㊀㊀㊀㊀雷剑宇,等.天舟货运飞船空间试验平台设计3)平台能力强㊂天舟货运飞船是仅次于空间站的大型航天器㊂作为交会对接跟踪飞行器,具有精确自主测定轨以及轨道机动能力;平台100V高压能源体系㊁中继高速天地通信系统可以满足大部分试验项目需求[18-20];直径3.35m舱体具备较大型载荷装载能力;充分利用推进剂的情况下,可以为试验任务留轨6个月以上,达到分阶段充分试验的目的㊂4)任务适应性好㊂任务末期,天舟货运飞船脱离空间站后,可以根据试验需要与空间站编队飞行,相互配合;也可以撤至不同轨道高度,拉大相位差,避免试验对空间站运行产生影响㊂可以释放微纳星㊁机动飞行器,充当地基/空基定向能武器试验靶标;作为通信节点开展激光通信试验;植入先进控制算法进行轨道机动和再入控制㊂3.2㊀试验支持方向㊀㊀天舟货运飞船通过充分发掘自身资源应用潜力,虽然不是专用的空间试验航天器,仍然可以支持诸多领域的在轨试验,主要包括:1)空间科学和技术试验㊂天舟平台密封货物舱内可以开展微重力流体物理与热物理㊁微重力燃烧科学㊁空间材料科学㊁微重力基础物理㊁空间元器件等方面科学和技术试验㊂2)在轨探测和观测试验㊂天舟平台货物舱舱外可以搭载对地㊁对天观测试验装置,并且可以开展90~500km轨道高度各类空间环境探测㊂3)关键技术在轨验证㊂航天器关键的探测㊁通信㊁控制设备设计定型前,可以在天舟平台上搭载飞行,在轨验证关键技术㊁考核性能指标㊁发现薄弱环节,降低定型产品研制风险㊂4)微纳卫星群部署㊂支持1U~100kg微纳卫星释放部署,一次任务可释放多达50颗以上㊂微小卫星可以在释放后独立完成预定试验任务,也可在天舟平台的配合和支持下开展工作㊂5)先进控制算法验证㊂天舟平台主控制计算机采用可重构设计,支持在轨注入和更新,为先进控制算法在轨验证提供了条件㊂平台可以通过自主精确测定轨验证算法的合理性,为算法改进提供数据支撑,且具备分阶段㊁多轮次试验的优势㊂3.3㊀试验支持设计3.3.1㊀载荷安装设计㊀㊀天舟货运飞船充分挖掘货物舱舱内㊁舱外各类空间资源,为载荷提供安装位置㊂相比于天鹅座,天舟货运飞船载荷安装位置类型更多㊁区域更大㊂1)货物舱内部㊂采用货架作为货物装载支撑结构,货架由铝蜂窝板结构的仪器板和立板组成,高度约为4m,结构形式如图5所示㊂仪器板共5层,通过螺钉安装在舱体框架上,形成4层物资安装空间,仪器板两层之间使用立板连接支撑㊂每个货格的水平仪器板上均预留了螺钉孔,作为载荷设备安装标准接口,可以安装包络尺寸不超过500mmˑ650mmˑ700mm,重量不超过50kg的载荷设备㊂对于超包络的特殊载荷设备,可以通过拆除立板的方式扩大安装空间㊂图5㊀货架结构示意图Fig.5㊀Shelf structure inside cargo cabin 2)货物舱柱段外侧㊂外柱段I象限和III象限部分区域可用于载荷安装,单个试验载荷设备重量不超过10kg,设备高度不大于100mm㊂分布区域如图6所示㊂3)后锥段舱内/外壁㊂后锥段舱内壁㊁外壁桁架设计16个460mmˑ460mm的试验载荷安装平台,用于试验载荷设备安装,即图7中的红色区域㊂每个平台可安装重量不超过20kg,高度不超过300mm的载荷设备㊂3.3.2㊀供电信息支持设计㊀㊀货运飞船目前配置了载荷管理单元㊁载荷配电单元和以太网交换机为核心的试验支持公用平台(图8)[21-22],设计了标准化㊁网络化㊁即插即用408载人航天第28卷图6㊀货物密封舱外柱段载荷安装区域示意图(红色部分) Fig.6㊀Potential rideshare mounting location on col-umn section of cargo cabin(Red part)供电信息接口,实现搭载载荷支持接口通用㊁简捷实施㊁动态管理㊂平台为试验载荷提供的供电㊁信息接口以及上下行信息支持设计如下:1)供电接口设计㊂载荷供电单元配置10路可控100V供电输出,单路最大电流5A,总输出功率不大于1000W㊂2)信息接口设计㊂管理单元为载荷统一提供1553B总线㊁遥测㊁指令等信息支持,以太网交换机为货物提供高速数据下行支持㊂①管理单元作为BC对专用1553B总线进行管理,载荷作为RT接入总线,能够支持10个RT;②管理单元提供68路模拟量采集通道,采样周期为500ms;③管理单元提供12路开关指令,驱动能力不大于300mA,用于对货物进行控制;④以太网交换机可提供10路百兆以太网接口,用于货物传输遥测数据和试验数据㊂3)上行信息传输支持㊂货运飞船独立飞行期间,试验载荷可以通过USB㊁中继S㊁中继Ka信道上行注入数据,最大速率不超过2Mbps㊂货运图7㊀货物舱后锥段载荷安装区域示意图(红色部分) Fig.7㊀Potential rideshare mounting location on rear cone of cargo cabin(Red part)图8㊀天舟货运飞船试验公用平台Fig.8㊀Common test platform of TZ cargo spaceship 飞船组合体飞行期间处于停靠模式时,可通过对接总线接收对接目标转发的注入数据,每次注入数据有效长度不超过192字节㊂4)下行信息传输支持㊂货运飞船独立飞行期间,可以通过数传和中继Ka链路下行模拟量和数字量遥测㊂通过中继Ka链路下行货物以太网遥测和试验数据,最大下行速率为100Mbps㊂组合体期间,通过空间站代传下行试验数据㊂508第6期㊀㊀㊀㊀雷剑宇,等.天舟货运飞船空间试验平台设计3.3.3㊀轨道机动设计㊀㊀货运主任务完成,货运飞船可以根据试验需求,利用剩余推进剂开展轨道机动,与空间站形成一定的相位差,达到指定的试验轨位㊂任务末期再入销毁过程中,可以开展亚轨道飞行㊂飞行试验轨道高度能力范围为120~500km㊂3.3.4㊀低温样本运输支持设计㊀㊀低温锁柜用于低温试验样本的装载运输,可在火箭临射前进行装载㊂柜体构型为立方体,带有前后开门,按照制冷范围分为0ħ(25L)和-20ħ(5L)两种规格,外形结构如图9所示㊂低温锁柜后门用于临射前通过火箭整流罩和货运飞船侧操作口往低温锁柜中装载样本,航天员在轨通过前门取出试验样本㊂图9㊀低温锁柜外形图Fig.9㊀Outside view of the space refrigerator4㊀搭载流程及接口认证设计㊀㊀为了充分利用天舟货运飞船平台试验支持能力,提升任务综合效益,载人航天工程办公室广泛征集可在天舟货运飞船平台上搭载的各类试验项目㊂为此,货运飞船发布了通用接口要求,建立了与搭载方联合设计的全新模式,设计了等效认证测试平台,简化搭载项目实施流程,缩短研制周期㊂4.1㊀载荷搭载实施流程㊀㊀试验载荷搭载遵循以下流程:1)载荷方首先根据货运飞船通用接口要求进行可行性论证,具备初步可行性后,向载人航天工程办公室提交试验方案;2)载人航天工程办公室审查认可后,组织货运飞船系统以及其他相关系统进行接口匹配性详细确认和方案设计评审;3)接口匹配性确认和方案设计评审通过后,载荷方按要求向载人航天工程办公室履行立项申报手续;4)载荷方开展试验载荷研制,如接口发生变化,则与货运飞船系统进行设计迭代㊂必要时,货运飞船系统可以与载荷方进行联合设计,消除设计障碍;5)试验载荷完成研制后,通过认证测试即可上船搭载㊂对于力㊁热特别敏感的设备可以随整船进行系统级力热试验㊂4.2㊀通用接口设计㊀㊀货运飞船系统发布通用标准接口要求,规定了机械㊁供电㊁信息等方面详细要求(图10),作为试验载荷设计的依据,便于试验载荷方开展搭载接口设计,降低接口不匹配和研制反复的风险㊂图10㊀货运飞船通用标准接口要求的主要内容Fig.10㊀The main contents of general standard inter-face requirements for space experiments4.3㊀联合设计与保障㊀㊀部分试验项目意义重大,且实施技术难度大,难以独立完成,鉴于部分载荷方没有在轨飞行试验项目研制经验,因此,货运飞船系统提出了与搭载方联合完成试验项目方案设计的全新方式,充分发挥总体设计优势和航天器研制经验,可以应载荷方要求介入方案设计,设计在轨试验场景,优化接口状态,推动试验项目顺利实施,帮助载荷方更快更好地实现试验目标㊂4.4㊀等效认证平台㊀㊀货运飞船平台与试验项目研制进度往往不能匹配,载荷设备难以采用平台设备一样的测试㊁试验模式㊂为实现货运飞船平台与试验项目研制解耦,以通用接口要求为基础,围绕管理单元㊁配电单元和以太网交换机为核心建立等效认证平台㊂试验载荷在等效认证平台通过接口测试,即表明机械㊁供电㊁信息等主要接口设计状态满足要求,608载人航天第28卷具备上船搭载开展飞行试验的条件㊂等效认证平台的建立,提高了货运飞船平台试验搭载的适应能力,以及试验项目研制的灵活性㊂5㊀试验平台应用情况㊀㊀2017年4月20日,TZ-1货运飞船发射,在轨开展了非牛顿引力实验检验关键技术验证㊁主动隔振关键技术验证㊁微重力对细胞增殖和分化影响研究㊁两相系统实验平台关键技术研究㊁空间环境监测与控制试验等13项试验[23-26],于2017年8月22日释放了一颗3U 立方星㊂2021年9月20日,TZ-3货运飞船发射,在轨开展激光视觉交会测量敏感器和空间碎片探测载荷2项试验㊂图11~图13为部分载荷实际安装照片㊂图11㊀立方星部署发射器Fig.11㊀CubeSat emitter onTZ-1图12㊀空间碎片探测载荷Fig.12㊀Test equipment for space debris detectionTZ-1和TZ-3货运飞船以分时工作㊁分时下传数据的模式进行载荷试验,全面满足了载荷在轨试验时长㊁时机㊁能源㊁信息传输㊁微重力环境㊁空间环境等多维度需求㊂图14为TZ-1货运飞船图13㊀舱内货架安装的试验载荷Fig.13㊀Test equipments installed in the cabin在轨释放立方星的影像,图15为发动机羽流监测装置获取的货物舱反推发动机羽流温度场[24]㊂15项试验均达到了预期的试验目的,实现一次任务多方受益㊂图14㊀天舟一号在轨释放立方星Fig.14㊀CubeSat released by TZ-1inorbit图15㊀发动机羽流温度场Fig.15㊀Temperature field of engine plume6㊀结论㊀㊀天舟货运飞船系统充分挖掘自身资源,发展出频度高㊁成本低㊁能力强且适应性好的空间试验平台;以开放的姿态,完成了标准接口和等效认证模式设计,减小了载荷设备研制风险,简化了搭载实施流程,加快了在轨试验进程㊂对于意义重大㊁708第6期㊀㊀㊀㊀雷剑宇,等.天舟货运飞船空间试验平台设计技术和实施难度大的项目,货运飞船系统可以采用联合设计模式,深入试验方案设计,促成项目落地,更好地发挥载人航天工程综合效益,促进科学技术创新研究㊂参考文献(References)[1]㊀周建平.我国空间站工程总体构想[J].载人航天,2013,19(2):1-10.Zhou J P.Chinese Space Station project overall vision[J].Manned Spaceflight,2013,19(2):1-10.(in Chinese) [2]㊀O Sullivan.Japanese Missions to the International Space Sta-tion:Hope from the East[M].Switzerland:Springer,2020:10-18.[3]㊀SpaceX.Dragon:Sending humans and cargo intospace,[EB/OL].(2022)[2022-10-08].https://www./vehicles/dragon/.[4]㊀Robinson J,Kwon D.Small satellite rideshares on commercialresupply missions to the international space station[C]//26thAnnual AIAA/USU Conference on Small Satellites.Washing-ton D.C.:AIAA,2012:1-8.[5]㊀Bogomolov N V,Anfalov A S,Borzykh S V,et al.Simulationof process of small satellites separation from deployer installedon cargo spacecraft[J].Journal of Physics:Conference Se-ries,2019,1392(1):12003.[6]㊀Ferkul P,Olson S,Urban D L.Results of large-scale space-craft flammability tests[R].ICES-2017-224,2017. [7]㊀Brooker J E,Dietrich D L,Gokoglu S A.Modeling and anal-ysis of realistic fire scenarios in spacecraft[R].ICES-2015,2015.[8]㊀asushi O,Kentaro I,Teppei O,et al.A quick review of anelectrodynamic tether experiment on the H-II transfervehicle[R].IEPC-2017-359,2017.[9]㊀Daisuke T,Toru K,Hirohiko U,et al.Experiments plan onthe HTV[J].Transactions of the Japan Society for Aeronauti-cal and Space Sciences,Aerospace Technology Japan,2014,12(29):1-4.[10]㊀Yasushi O,Satomi K,Teppei O,et al.Review of KITE-elec-trodynamic tether experiment on the H-II transfer vehicle[J].Acta Astronautica,2020,177(Dec):750-758. [11]㊀小林聡,川嶋一誠,春木美.HTV搭載小型回収カプセル(HSRC)の航法㊃誘導モジュールの機能紹介と実運用結果[J].MSS技報,2020,30:1-6.[12]㊀Yusuke S,Takane I.Concept study of HTV-R(HTV-Return)[J].Trans JSASS Aerospace Tech.Japan,2014,29(12):11-19.[13]㊀Barmin I,Bryukhanov N,Egorov ing the progress trans-port spacecraft in structure of the International Space Stationfor realization of scientific experiments under microgravity con-ditions[J].Acta Astronautica,2002,51(1):255-259. [14]㊀Babkin E V,Belyaev M Y,Bryukhanov N A,et al.Experi-mental study of the spacecraft progress uncontrolled attitudemotion[J].Keldysh Institute Preprints,2004,43(25):1-25.[15]㊀白明生,金勇,雷剑宇,等.天舟一号货运飞船研制[J].载人航天,2019,25(2):249-255.Bai M S,Jin Y,Lei J Y,et al.Research and development ofTianzhou-1cargo spacecraft.[J].Manned Spaceflight,2019,25(2),249-255.(in Chinese)[16]㊀Hao C,Hang W L,Koki H.Space transportation system andinfrastructure design for regular interplanetary cargomissions[C]//AIAA SPACE and Astronautics Forum and Ex-position:AIAA,2007:5197.[17]㊀中国载人航天工程办公室.关于征集通过天舟系列货运飞船搭载科学技术试(实)验和应用项目的机会公告(第一轮)[EB/OL].(2021-11-24)[2022-10-08]http:///gfgg/202111/t20211124_49096.html.China Manned Space Engineering Office.Notice aboutthrough Tianzhou onboard science and technology trial and ap-plication projects(first round)[EB/OL].(2021-11-24)[2022-10-08]/gfgg/202111/t20211124_49096.html.(in Chinese) [18]㊀龙吟,朱珂,丁凯,等.一种用于近地轨道航天器的天地网络一体化方案[J].空间电子技术,2016,13(4):67-72.Long Y,Zhu K,Ding K,et al.Design of space-ground inte-grated network for LEO spacecraft[J].Space ElectronicTechnology,2016,13(4):67-72.(in Chinese) [19]㊀张强,陈长青,刘宗玉,等.天舟二号货运飞船全相位自主快速交会对接技术和在轨验证[J].空间控制技术与应用,2021,47(5):33-39.Zhang Q,Chen C Q,Liu Z Y,et al.All-phase autonomousquick rendezvous and docking technology and in-orbit verifica-tion of Tianzhou-2cargo spacecraft[J].Aerospace Controland Application,2021,47(5):33-39.(in Chinese) [20]㊀胡海勇,刘家川,李甲申,等.货运飞船效费综合特性研究[J].载人航天,2021,27(6):727-734.Hu H Y,Liu J C,Li J S,et al.Research on comprehensivecost-effectiveness characteristics of cargo spaceship[J].Man-ned Spaceflight,2021,27(6):727-734.(in Chinese) [21]㊀于磊,王宏佳,王林涛.航天器高压直接配电设计研究[J].载人航天,2017,23(6):770-775.Yu L,Wang H J,Wang L T.Research on high voltage directpower distribution system for spacecraft[J].Manned Space-flight,2017,23(6):770-775.(in Chinese) [22]㊀梁建辉,金海丁,孙永进,等.航天器公用空间搭载试验平台设计[J].航天器环境工程,2011,28(6):521-524.Liang J H,Jin H D,Sun Y J,et al.Design of a general flightexperimental platform for spacecraft[J].Spacecraft Environ-ment Engineering,2011,28(6):521-524.(in Chinese) [23]㊀于钱,臧卫国,杨东升,等. 天舟一号 货运飞船在轨污染探测数据分析[J].装备环境工程,2018,15(4):70-74.Yu Q,Zang W G,Yang D S,et al.On-orbit contaminationdetection data for"TZ-1"cargo spaceship[J].SpacecraftEnvironment Engineering,2018,15(4):70-74.(in Chi-nese)[24]㊀刘文军,朱志强,刘秋生.天舟一号货运飞船空间实验装置蒸发相变地面实验[J].空间科学学报,2016,36(4):481-486.Liu W J,Zhu Z Q,Liu Q S.Ground experiment study of e-vaporation phase change for space experiment device of TZ-1cargo spaceship[J].Chinese Journal of Space Science,2016,36(4):481-486.(in Chinese)[25]㊀Liu W,Zhang Y K,Li Z F,et al.Control performance simula-tion and tests for microgravity active vibration isolation systemonboard the Tianzhou-1cargo spacecraft[J].Astrodynamics,2018,2(4):339-360.[26]㊀Lei X H,Cao Y J,Zhang Y.Effect of microgravity on prolif-eration and differentiation of embryonic stem cells in an auto-mated culturing system during the TZ-1space mission[J].Cell Proliferation,2018,51(5):e12466.(责任编辑:冯雪梅)808载人航天第28卷。
winautomation 操作手册(原创版)目录1.Winautomation 简介2.安装与配置3.基本操作与功能4.自定义脚本与任务5.高级功能与应用场景6.常见问题与解决方案7.总结正文一、Winautomation 简介Winautomation 是一款功能强大的 Windows 自动化工具,可以帮助用户实现各种自动化任务,提高工作效率。
它可以模拟人类操作,实现自动化运行,降低重复性劳动,适用于各种场景,如批量处理文件、自动化测试等。
二、安装与配置1.下载 Winautomation 软件并运行安装程序,按照提示进行安装。
2.打开 Winautomation,点击“配置”按钮,进行基本设置。
3.根据需要设置语言、界面风格等选项,点击“应用”保存设置。
三、基本操作与功能1.鼠标操作:点击、拖动、释放等。
2.键盘操作:按下、抬起、敲击等。
3.窗口操作:最小化、最大化、关闭等。
4.文件操作:新建、打开、保存、删除等。
5.其他功能:延时、循环、条件判断等。
四、自定义脚本与任务1.新建脚本:点击“新建”按钮,选择脚本类型,创建新脚本。
2.编辑脚本:双击脚本文件,编写自动化任务代码。
3.运行脚本:点击“运行”按钮,执行脚本任务。
4.调试脚本:点击“调试”按钮,查找并修复脚本错误。
五、高级功能与应用场景1.批量处理文件:使用批量处理脚本,实现文件的批量操作。
2.自动化测试:结合测试工具,实现自动化测试流程。
3.数据分析:通过脚本处理大量数据,提高数据分析效率。
4.其他应用场景:RPA(机器人流程自动化)、办公自动化等。
六、常见问题与解决方案1.问题:脚本运行时出现错误。
解决方案:检查脚本代码,修复语法错误,确保所有操作都正确无误。
2.问题:无法正常模拟鼠标或键盘操作。
解决方案:检查 Winautomation 是否被其他程序占用,尝试重新启动或关闭其他可能影响 Winautomation 运行的程序。
—SELEC TION GUIDEEmax 2 embedded automatic throwover Creating the main-gen automatic transfer scheme—Quickly and easily create a main-gen open transition automatic throwover (ATO) scheme using ABB’s Emax 2 all-in-one embedded solution.—Table of contents01. Introduction 0402. E max 2 air circuit breakerordering code construction 06 03. Accessories 11—IntroductionThis guide will assist you in selecting the two (2) circuit breakers requiredto automatically switch from the main utility power line to a generator using ABB’s Emax 2 all-in-one embedded ATO solution.A system able to switch the electrical power supply fromthe main line to an emergency line helps minimize problems caused by faulty conditions in the public power network. These operations, commonly know as “automatic switching,” comprise sequences that automatically control the installation components (circuit breakers play a fundamental role) without intervention from a human operator.To help guarantee that power is supplied to the load, redundancy in supply sources type N+1, usually consistingof a transformer and emergency generator (or, as an alternative, a second transformer), is a fundamental requirement.Use this document in conjunction with the ABB Emax 2 configurator, the embedded white paper 1SDC007115G0202 and the Emax 2 circuit breaker technical catalog1SXU200040C0201 to create your own main-genATO solution.Emax 2 circuit breakers are configured by the user specifically for their unique application. A complete Emax 2 circuit breaker catalog number consists of 20 characters. For your main-gen ATO to operate properly, the characters shown without gray boxes in this guide are mandatory, while characters shown in gray boxes are for options and may be filled with a zero (0) or X if not utilized. Two separate breakers are required for the main-gen ATO.A simple selection list for the Emax 2 would be as follows:• Ekip Touch (or higher) trip unit• Ekip Measuring (or higher) package• Ekip supply• Ekip link• Ekip signaling 2k• Ekip Com actuator• Spring-charging motor• YO opening coil• YC closing coil• ATO licenseAdditional accessories such as pilot devices, mechanical interlocks and mechanically interlocked contactors are included in this selector.NOTE: Application-specific wiring diagrams can be found in document 1SDM000009A1001.4E M A X 2 E M B E D D E D ATO CR E ATI N G TH E M A I N-G EN AU TO M ATI C TR A NSFER SCH EM EG—LegendR, S T, N: 3 phases+ neutralMEAS: Ekip measuring/ internal voltage plug Line 1/generator: Power source (transformeror generator)5 I NTR O D U C TI O N09 – Auxiliary powersupply (Ekip supply)and measuring07 – Fixed/drawout andterminal connections—Instructions for orderingMain-gen ATOEmax 2 circuit breaker order code explanation for embedded main-generator ATOTwo separate breakers are required for the main-gen ATO.A complete Emax 2 breaker catalog number consists of 20 characters.All 20 characters are required. The characters shown without gray boxes must be selectedfrom the choices listed in these pages for proper configuration. Characters shown in grayboxes are for options and may be filled with a zero (0) or X if not utilized.02 – Frame04 – Frame rating (amps)—01 – Emax 2 prefix—02 – FrameCode—03 – Short circuit rating/versionCode508 V ACUL kA at635V AC42–50(1)65(1)8585/100(4)––IECkA at440 V AC42506685100150–150IECkA at690 V AC424266(2)6685/100(3)100–1001) E1.2N =42 kA2) E1.2N= 50 kA3) E2.2H and E4.2H = 85 kA / E6.2H = 100 kA4) E2.V and E4.2V = 85 kA / E6.2V = 100 kA—05–06 – Rating plug(amps)6E M A X 2 E M B E D D E D ATO CR E ATI N G TH E M A I N-G EN AU TO M ATI C TR A NSFER SCH EM E19 – Racking lockoptions (first lock)and factory testreport17 – Spring-chargingmotor (M) and EkipCom actuator15 – Opening coil (YO)13 – Remote reset(YR), second bellalarm (S51/2) andready-to-closecontacts (RTC)11 – Redundantcommunicationsand additional Ekipmodules—04 – Frame rating(amps)Code —07 – Fixed/drawout and terminal connectionsFixed (alt. terminals)Upper terminalsHoriz. rear(2)Vert. rear Front(7)Ext. front(7)FCCUAL(7)Horiz. rear spread(6)(7)Vert. rear spread(6)(7)(SHR) (6)(7)7 Vert. rear spread(SVR) (6)(7)––––––87I NS TR U C TI O NS FO R O R D ER I N G—10 – Communication modules (1)(2) (optional)1) Maximum of 3 modules for E2.2, E4.2, E6.22) Maximum of 2 modules for E1.2—11 – Redundant communications and additional Ekip modules (optional)—12 – Auxilary contacts (AUX) and additional signaling (4k) (optional)Code- 4 AUX (4Q) 400 V 4 AUX (2Q+2Q) 24 and 400 VE G (1) Not compatible with E1.2(2) Not compatible with Ekip Dip or switch disconnectors (3) Provided as standard for all circuit breakersNote: Options O, D, H and M are for use with switch disconnectors only—13 – Remote reset (YR), second bell alarm (S51/2) and ready-to-close contacts (RTC) (optional)CodeNoneV AC/DCV AC/DCV AC/DCV DCV DC (1)–A BC P Q (1) Not compatible with E1.2(2) Not compatible with Ekip Dip or switch disconnectors (3) Provided as standard for all circuit breakersNote: Options O, D, H and M are for use with switch disconnectors only—08 – Ekip trip unitCode250 V(1)LMController (1)PContoller (1)RController (1)YZ1unit +optional 24 V DC bell alarmController (1)45Controller (1)7Contoller (1)91) Ekip Power Controller requires the use of Ekip Measuring or Measuring Pro modulesNote: Please reference embedded ATO white paper—Instructions for ordering Main-gen ATO—09 – Auxiliary power supply (Ekip supply)and measuringCodeMeasuring package1% Accuracy measuring (1)78AC/DC supplyMeasuring – Externalmounting +24 V DC supply J KMeasuring – External mounting +110–240 V AC/DC supplyL M1) Standard with Hi-Touch or greater8E M A X 2 E M B E D D E D ATO CR E ATI N G TH E M A I N -G EN AU TO M ATI C TR A NSFER SCH EM E—14 – Closing coil (YC) and redundant closing coil (YC2)Code2430 4860 110–120 120–127 220–240 240–250 380–400415–440480–500—15 – Opening coil (YO)Code24 30 48 60 110–120120–127220–240240–250380–400415–440480–500—16 – Undervoltage release (UVR) or redundant opening coil (YO2) (optional)—17 – Spring-charging motor (M) and Ekip Com actuatorCode24–30 48–60 100–130 220–250 380–415440–480 (1) Not compatible with E1.2—18 – Pushbutton locking options (optional)Pushbutton covers(PBC)Padlock in open position(PLC)PBC specialPBC padlockPBC padlockPBC padlockPLC (4 mm)PLC (7 mm)PLC (8 mm)(1) Standard key for same key option is #20005. Locks for #20006–20009 are available for order as separate accessories. Note: Key lock options for Castell and Ronis/Profalux are available for order as separate accessories.—Instructions for ordering Main-gen ATO9I NS TR U C TI O NS FO R O R D ER I N G—19 –Racking lock options (first lock) and factory test report (optional)(KLP-S)(1)(KLP-D)(1)Profulaux provisions(1)provisions (2)(1) Standard key for same key option is #20005. Locks for #20006–20009 are available for order as separate accessories.(2) Two Castell adapters cannot be used at once, but can used in either position with another style of lock.—20 –Second racking lock options, mechanical operations counter (MOC) and extended warranty (optional)(KLP_S)(1) (KLP-D)(1)provisions(1)(KLP-A)(2)Additional combinations Note: For additional combinations, please contact your local ABB sales person(1) Standard key for same key option is #20005. Locks for #20006–20009 are available for order as separate accessories.(2) Two Castell adapters cannot be used at once, but can used in either position with another style of lock.—Instructions for ordering Main-gen ATO10E M A X 2 E M B E D D E D ATO CR E ATI N G TH E M A I N -G EN AU TO M ATI C TR A NSFER SCH EM E—Accessories Order separately—AccessoriesType U.S. code Ekip programming T&P cable ZEAKPPGM Ekip programming software Download ATO license(1)ZEAMGO 1) One ATO license per breaker pair required—Mechanical interlock(1)(2) — Cables for mechanical interlock (Group 1)Type U.S. code E1.2…E6.2 Type A horizontal ZEACBLAHR E2.2…E6.2 Type B, C, D horizontal ZEACBLBHR E1.2…E6.2 Type A vertical ZEACBLAVR E2.2…E6.2 Type B, C, D vertical ZEA6CBLBVR 1) ABB recommends mechanically interlocking the breakers when possibleas a safety precaution.2) One type of cable must be ordered for each interlock. The cable must be orderedwith the fixed circuit breaker or the cradle of a drawout circuit breaker.—Mechanical interlock — Lever for mechanical interlock of fixed circuit breakeror cradles (Group 2)(1)Type U.S. code E2.2 Lever for mechanical interlock ZE2LEV E4.2 Lever for mechanical interlock ZE4LEV E6.2 Lever for mechanical interlock ZE6LEV E6.2 4p lever for mechanical interlock ZE6LEV-4 1) The lever for the mechanical interlock is not required for E1.2—Mechanical interlock — Support for mechanical interlock of fixed circuit breaker (Group 3)Type U.S. code E1.2 Type A – floor mounted ZE1SPA E1.2 Type A – wall mounted ZE1SPAFM E2.2…E6.2 Type A, B, D ZEBSPB E2.2…E6.2 Type C ZEBSPC —Mechanical interlock — Support for mechanical interlock of cradle (Group 4)Type U.S. code E1.2 Type A ZE1SPCRDA E2.2…E6.2 Type A, B, D ZEBSPB E2.2…E6.2 Type C ZEBSPC—Pilot devices(1)(2)Type U.S. code 2-Position; black bezel C2SS2-10B-10C2SS2-10B-01C2SS2-10B-11C2SS2-10B-20 2-Position; chrome bezel C2SS2-30B-10C2SS2-30B-01C2SS2-30B-11C2SS2-30B-20 3-Position; black bezel C3SS1-10B-11C3SS1-10B-20 3-Position; chrome bezel C3SS1-30B-11C3SS1-30B-20 1) Choose according to selector switches needed as per circuit diagrams1SDM000009A10012) ABB pilot device catalog 1SFC151007C0201—Contactors (to be mechanically interlocked)(1)(2)Type U.S. code AF09 2 NO/2 NC 24–60 V AF09-22-00-11 AF09 2 NO/2 NC 48–130 V AF09-22-00-12 AF09 2 NO/2 NC 100–250 V AF09-22-00-13 AF09 2 NO/2 NC 250–500 V AF09-22-00-14 Mechanical interlock AF09VM41) Choose according to relays needed as per circuit diagrams 1SDM000009A10012) ABB motor protection and control catalog Motor Protection and ControlNote: Please reference embedded white paper 1SDC007115G0202 for additional informationNote: For additional information on the Emax 2 circuit breaker, please reference technical catalog 1SXU200040C020111I NS TR U C TI O NS FO R O R D ER I N G A N D ACCE SSO R I E S1S X U 200100G 0201 3.2020© Copyright 2020 ABB. All rights reserved.Specifications subject to change without notice.—ABB Inc.Electrification Business 860 Ridge Lake Blvd.Memphis, TN 38120 /lowvoltage。
1Connect the power adapterNetzadapter anschließenBranchez l’adaptateur secteur Sluit de netadapter aanAnslut nätadaptern2Turn on your mobile thin clientMobile Thin Client einschaltenMettez le client léger mobile sous tension Schakel uw mobile thin client inSlå på din bärbara tunna klientProduct support and manuals Produktsupport und Handbücher Support produits et manuelsProductondersteuning en handleidingen Produktsupport och handböcker/wyse/support /wyse/downloadsContact DellKontaktaufnahme mit Dell | Contacter Dell Contact opnemen met Dell | Kontakta Dell /contactdellRegulatory and safetySicherheitshinweise und Zulassungsinformationen Réglementations et sécuritéRegelgeving en veiligheid | Reglering och säkerhet /regulatory_complianceRegulatory modelMuster-Modellnummer | Modèle réglementaire Beschreven model: | Regleringsmodell P72SRegulatory typeMuster-Typnummer | T ype réglementaire Beschreven type: | RegleringstypP72S001Client device modelClient-Gerätemodell | Modèle du périphérique client Model clientapparaat | KlientenhetsmodellDell Latitude 5280 Mobile TC© 2017 Dell Inc. or its subsidiaries.2017-06FeaturesFunktionen | Caractéristiques | Kenmerken | Funktioner1. Infrared (IR) camera (optional)2. Infrared emitter (optional)3. Camera status light (optional)4. Camera (optional)5. uSIM card slot (optional)6. microSD card reader7. Dual array microphones8. Power button9. Nobel Wedge lock slot10. Network port11. VGA port12. USB 3.0 port with PowerShare13. Headset/Microphone port14. Touch Fingerpint reader (optional)15. Battery charge status light16. Speakers17. T ouchpad18. Smart card reader (optional)19. USB 3.0 port20. HDMI port21. DisplayPort over USB T ype-C22. Power connector port23. Service tag label1. Caméra infrarouge (IR) (en option)2. Émetteur infrarouge (en option)3. Voyant d’état de la webcam(en option)4. Webcam (en option)5. Logement de carte uSIM (en option)6. Lecteur de carte microSD7. Deux microphones8. Bouton d’alimentation9. Emplacement pour verrou de sécuritéNoble10. Port réseau11. Port VGA12. Port USB 3.0 avec PowerShare13. Port casque/microphone14. Lecteur d’empreintes digitales(en option)15. Voyant de niveau de charge de labatterie16. Haut-parleurs17. Pavé tactile18. Lecteur de carte à puce (en option)19. Port USB 3.020. Port HDMI21. DisplayPort avec USB T ype-C22. Port du connecteur d’alimentation23. Étiquette du numéro de service1. Infrarotkamera (optional)2. Infrarotsender (optional)3. Kamerastatusanzeige (optional)4. Kamera (optional)5. USIM-Kartensteckplatz (optional)6. microSD-Kartenleser7. Dual-Array-Mikrofone8. Betriebsschalter9. Steckplatz für Nobel Wedge-Schloss10. Netzwerkanschluss11. VGA-Anschluss12. USB 3.0-Anschluss mit PowerShare13. Headset-/Mikrofonanschluss14. Fingerabdruckleser mit T ouch-Funktion(optional)15. Akkuladeanzeige16. Lautsprecher17. Touchpad18. Smart Card-Leser (optional)19. USB 3.0-Anschluss20. HDMI-Anschluss21. DisplayPort über USB T yp-C22. Netzanschluss-Port23. Service-Tag-Etikett1. Infraroodcamera (optioneel)2. Infraroodzender (optioneel)3. Camera-statuslampje (optioneel)4. Camera (optioneel)5. uSIM-kaartsleuf (optioneel)6. microSD-kaartlezer7. Dual array-microfoons8. Aan-uitknop9. Sleuf voor Nobel Wedge-slot10. Netwerkpoort11. VGA-poort12. USB 3.0-poort met PowerShare13. Headset/microfoon-poort14. Vingerafdruklezer (optioneel)15. Lampje voor batterijladingsstatus16. Luidsprekers17. Toetsenblok18. Smart card-lezer (optioneel)19. USB 3.0-poort20. HDMI-poort21. DisplayPort via USB Type-C22. Netconnectorpoort23. Servicetaglabel1. Infraröd (IR) kamera (tillval)2. Infraröd sändare (tillval)3. Kamerastatuslampa (tillval)4. Kamera (tillval)5. uSIM-kortplats (tillval)6. microSD-kortläsare7. Dubbla matrismikrofoner8. Strömbrytare9. Nobel Wedge-låsfack10. Nätverksport11. VGA-port12. USB 3.0-port med PowerShare13. Headset-/mikrofonport14. Fingertrycksavläsare (tillval)15. Statusindikatorlampa förbatteriladdning16. Högtalare17. Pekskiva18. Smartkortläsare (tillval)19. USB 3.0-port20. HDMI-port21. DisplayPort via USB Type-C22. Port för nätanslutning23. Etikett med servicenummer。
北京生命科学研究所(NIBS)上目录导师简介(20人)柴继杰博士 (2)董梦秋博士 (3)杜立林博士 (5)高绍荣博士 (6)郭岩博士 (7)黄牛博士 (8)雷晓光博士 (10)李文辉博士 (11)李夏璐博士 (12)罗敏敏博士 (13)戚益军博士 (14)邵峰博士 (15)王晓晨博士 (16)王晓东博士 (18)袭荣文博士 (19)叶克穷博士 (20)张宏博士 (21)张跃林博士 (22)周俭民博士 (23)朱冰博士 (24)柴继杰博士教育与工作经历:1987 大连轻工业学院化学工程系学士1997 中国协和医科大学药物分析学博士1997-1999 中国科学院生物物理研究所做博士后1999 美国普林斯顿大学分子生物学系做博士后2004- 中国北京生命科学研究所工作研究概述:该实验室关注并研究在生物学及药学应用中的重要大分子的结构与功能。
主要通过蛋白晶体衍射的方法及一些生物、生化方面的手段阐述这些生物大分子在结构和功能上的联系。
柴继杰博士实验室并不局限于已建立的研究框架,与北京生命科学研究所的其他研究小组合作,开展联合研究项目。
一个正进行的研究方向将关注专职吞噬细胞(professional phagocytes)对凋亡细胞的识别途径。
近十年来大量的工作已对凋亡调控的机制做了详尽的研究。
相对的,在细胞凋亡后如何去除凋亡的细胞残体的问题并没得到关注。
(此问题并不是不重要)如果在此环节出现问题将造成炎症反应的异常持续和自身免疫的出现。
在吞噬细胞消除凋亡的细胞体的过程中,第一步反应是凋亡的细胞体和处于凋亡过程中的细胞表面出现如磷脂酰丝氨酸(PS)等可被各种吞噬细胞上的受体识别的发出“eat-me”信号的信号分子。
柴继杰博士近年来的研究发现这一识别过程并不仅仅是此类信号分子与吞噬细胞受体的简单结合。
实际上,一类可被其他吞噬细胞的受体识别的桥联分子(bridging molecule)如Annexin I(Anx I)也参与了识别过程。