基于制动控制的汽车驱动防滑系统
- 格式:pdf
- 大小:436.13 KB
- 文档页数:3

驱动防滑系统的工作原理驱动防滑系统是一种车辆动力控制系统,通过对车轮进行控制来提高车辆的稳定性和操控性。
该系统的工作原理是通过传感器监测车轮的转速和其他相关参数,然后根据这些数据来进行实时调整,从而防止车轮打滑。
驱动防滑系统主要由以下几个组件组成:传感器、控制单元、执行器和制动系统。
传感器负责监测车轮的转速和其他参数,如转向角度、加速度等。
控制单元则根据传感器提供的数据进行计算和判断,并发送指令给执行器。
执行器根据控制单元的指令来调整车轮的转速,以达到防止打滑的效果。
制动系统则作为辅助手段,在必要时使用制动力来控制车轮的转速。
具体来说,驱动防滑系统的工作原理如下:1. 车轮转速监测:传感器安装在每个车轮上,用于监测车轮的转速。
它们可以通过磁传感器、光传感器或者其他技术来实现。
传感器将监测到的转速数据发送给控制单元。
2. 控制单元计算:控制单元接收传感器发送的数据,并进行实时计算和判断。
它会比较不同车轮的转速,判断是否存在打滑情况。
如果发现某个车轮的转速明显高于其他车轮,就认为该车轮可能存在打滑,并采取相应措施。
3. 转速调整:控制单元根据计算结果,向执行器发送指令来调整车轮的转速。
执行器可以采用多种方式实现,如通过控制发动机输出功率、调整刹车压力等。
具体的调整方式取决于车辆的具体设计和驱动防滑系统的实现方式。
4. 制动辅助:在必要时,驱动防滑系统可以通过制动系统来辅助调整车轮的转速。
例如,在某个车轮出现打滑时,控制单元可以发送指令给制动系统,增加该车轮的制动力,以减少打滑情况。
总的来说,驱动防滑系统通过监测车轮的转速和其他参数,实时计算并判断车轮是否存在打滑情况,然后通过调整车轮的转速来防止打滑。
这种系统可以提高车辆的稳定性和操控性,减少在低摩擦路面或急刹车时的打滑风险,提高车辆的安全性和可靠性。
需要注意的是,驱动防滑系统并不能完全消除车辆打滑的可能性,它只能在一定程度上减少打滑风险。
此外,不同车辆的驱动防滑系统可能会有不同的实现方式和性能表现,具体效果会受到车辆设计、传感器精度、控制算法等多种因素的影响。
汽车驱动防滑控制系统的控制规律研究的开题报告一、研究背景随着汽车工业的不断发展,汽车的安全性能要求越来越高。
汽车驱动防滑控制系统是为了增强汽车在复杂路面上的驱动稳定性和制动安全性,防止车辆因轮胎打滑和滑移而失控和事故的一种重要装置。
驱动防滑控制系统,即电子稳定系统(Electronic Stability Control,ESC),可以有效的控制车辆的滑动和打滑,从而提高驾驶安全性。
驱动防滑控制系统涉及到多个领域,包括电子控制技术、机械工程、车辆动力学、信号处理等等。
因此,对于驱动防滑控制系统的控制规律进行研究,对于提高汽车安全性能和驾驶的舒适性具有很重要的意义。
二、研究目的本研究旨在探讨汽车驱动防滑控制系统的控制规律,通过对系统的原理进行分析和研究,探讨适合不同路面环境下的控制策略,提高驾驶安全性能和驾驶的舒适性。
三、研究内容1. 驱动防滑控制系统的基本原理和工作流程;2. 汽车在不同路面状况下的驱动方式及情况分析;3. 驱动防滑控制系统的控制策略及其原理;4. 驱动防滑控制系统的性能及影响因素的分析;5. 基于控制规律的驱动防滑控制系统参数的研究;6. 驱动防滑控制系统仿真分析。
四、研究方法和技术路线本研究将采用文献资料法、数值仿真和实验法相结合的方法进行研究。
具体研究步骤如下:1. 文献资料收集和综述阅读;2. 建立驱动防滑控制系统的建模和仿真平台;3. 分析控制策略及控制规律,研究影响驱动防滑控制系统性能的因素有哪些,以及如何优化控制策略;4. 因原型车难以得到,采用实验台架搭建好驱动防滑控制系统,通过相应的路况模拟进行试验;5. 分析模拟数据和实验数据,比较实验结果和仿真结果,验证模型的有效性。
五、预期成果和意义通过研究汽车驱动防滑控制系统的控制规律和影响因素,预计可以得到以下成果:1. 建立适于不同路面环境下的驱动防滑控制系统的控制策略;2. 探究驱动防滑控制系统的性能和影响因素,为其性能改进提供参考;3. 分析驱动防滑控制系统的仿真数据和试验数据,验证模型的有效性;4. 为提高汽车行驶安全性能和驾驶的舒适性提供参考。



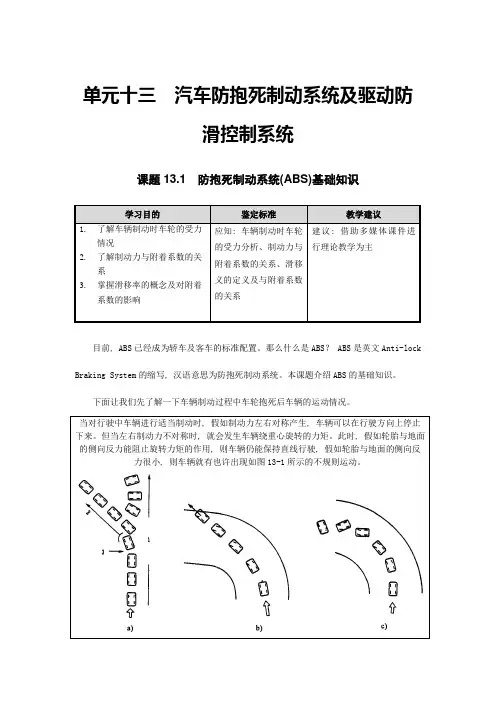
单元十三汽车防抱死制动系统及驱动防滑控制系统课题13.1 防抱死制动系统(ABS)基础知识学习目的鉴定标准教学建议1.了解车辆制动时车轮的受力情况2.了解制动力与附着系数的关系3.掌握滑移率的概念及对附着系数的影响应知: 车辆制动时车轮的受力分析、制动力与附着系数的关系、滑移义的定义及与附着系数的关系建议: 借助多媒体课件进行理论教学为主目前, ABS已经成为轿车及客车的标准配置。
那么什么是ABS? ABS是英文Anti-lock Braking System的缩写, 汉语意思为防抱死制动系统。
本课题介绍ABS的基础知识。
下面让我们先了解一下车辆制动过程中车轮抱死后车辆的运动情况。
当对行驶中车辆进行适当制动时, 假如制动力左右对称产生, 车辆可以在行驶方向上停止下来。
但当左右制动力不对称时, 就会发生车辆绕重心旋转的力矩。
此时, 假如轮胎与地面的侧向反力能阻止旋转力矩的作用, 则车辆仍能保持直线行驶, 假如轮胎与地面的侧向反力很小, 则车辆就有也许出现如图13-1所示的不规则运动。
图13-1 车轮抱死后车辆的运动情况a) 车辆直线行驶车轮抱死时 b) 车辆弯道行驶仅前轮抱死时 c) 车辆弯道行驶仅后轮抱死时如图13-1a)所示, 当车辆直线行驶车轮抱死时, 车辆出现了制动跑偏或甩尾侧滑的现象。
如图13-1b)所示, 当车辆弯道行驶仅前轮抱死时, 车辆出现了失去转向能力的现象。
如图13-1c)所示, 当车辆弯道行驶仅后轮抱死时, 车辆出现了甩尾侧滑的现象。
想一想:制动时车轮的抱死引起了车辆不规则的运动, 而车轮是如何抱死的?它与哪些因素有关呢?一、制动时车轮的受力分析1. 地面制动力(FB)如图13-2所示是汽车在良好的路面上制动时, 车轮的受力情况。
图中忽略了滚动阻力矩和减速时的惯性力矩。
图13-2 制动时车轮受力分析Tμ-制动中的摩擦力矩V F-汽车瞬时速度F B-地面制动力G-车轮垂直载荷G Z-地面对车轮的反作用力r-车轮的滚动半径V R-车轮的圆周速度F S-侧向力ω-车轮的角速度α-侧偏角汽车制动时, 由于制动鼓(盘)与制动蹄摩擦片之间的摩擦作用, 形成了摩擦力Tμ, 此力矩与车轮转动方向相反。
车辆防滑模式工作原理
车辆防滑模式(Anti-lock Braking System,简称ABS)是一种安全
系统,它的目的是防止车辆在制动时发生打滑,提高制动效能和操控
稳定性。
ABS主要由传感器、控制器和执行器三部分组成。
ABS系统利用轮速传感器来监测车轮的转速。
这些传感器会测量每
个车轮的转速,并将数据传输给控制器。
控制器会实时分析这些数据,确认是否存在车轮打滑的情况。
当控制器检测到车轮即将打滑时,它会通过控制执行器来调整制动力。
执行器主要由阀门和泵组成。
当发生车轮打滑时,控制器会迅速
关闭相应的制动阀门,减少制动力,从而避免车轮锁死。
同样的,当
控制器检测到车轮恢复附着力时,它会通过泵增加制动力,使车轮保
持良好的制动效果。
ABS系统会不断地监测车轮的转速,并根据反馈信息来调整制动力。
它可以实时调整每个车轮的制动力分配,确保车辆稳定地制动,并保
持良好的操控性能。
车辆防滑模式工作原理是通过实时监测车轮转速,控制执行器调整
制动力,以避免车轮打滑。
这种系统的存在可以大大提升车辆的制动
效能和操控稳定性,从而提高驾驶安全性。
tcs工作原理TCS(Traction Control System)工作原理。
TCS(Traction Control System)是一种车辆动力控制系统,它旨在提高车辆在低附着力路面上的牵引力,从而增强车辆的稳定性和安全性。
TCS通过监测车轮的转速,并在检测到车轮打滑时,通过减少发动机输出功率或者刹车来防止车轮打滑,从而提供更好的牵引力。
TCS系统主要由传感器、控制单元和执行单元组成。
传感器用于监测车轮的转速,通常采用轮速传感器来实现。
控制单元负责接收传感器传来的信号,并根据信号的变化来判断车轮是否打滑,然后通过执行单元来控制发动机输出功率或者刹车来防止车轮打滑。
TCS系统的工作原理是基于车轮转速的监测和控制。
当车辆行驶在低附着力路面上时,如雨天、雪天或者泥泞路面,车轮容易出现打滑现象。
这时,TCS系统会通过传感器监测车轮的转速,一旦发现车轮打滑,控制单元会立即采取措施来防止车轮打滑,以提供更好的牵引力。
TCS系统主要通过两种方式来防止车轮打滑,一种是通过减少发动机输出功率,另一种是通过刹车来控制车轮的转速。
当系统检测到车轮打滑时,控制单元会向发动机控制系统发送信号,减少发动机输出功率,从而减少车轮的转速,防止车轮打滑。
另外,系统也可以通过刹车来控制车轮的转速,当检测到车轮打滑时,控制单元会向刹车系统发送信号,使得打滑的车轮得到控制,提供更好的牵引力。
总的来说,TCS系统通过监测车轮的转速,并在检测到车轮打滑时,通过减少发动机输出功率或者刹车来防止车轮打滑,从而提供更好的牵引力,增强车辆的稳定性和安全性。
这种系统在低附着力路面上起到了重要作用,提高了车辆的操控性和安全性,是现代车辆不可或缺的重要系统之一。
课题15.6 驱动防滑(ASR)系统有经验的驾驶员都有这样的体会,当驾驶汽车在低附着系数的路面(例如泥泞或有冰雪的路面)上快速起步或加速行驶时,驱动车轮会发生滑转(俗称车轮“打滑”)。
这种现象是什么原因造成的呢?想一想,我们已经知道了汽车在制动过程中,制动器制力与地面制动力之间的不和谐关系造成了制动车轮的抱死滑移。
而在车轮的驱动过程中,车轮的驱动力与地面所提供的最大附着力之间是否也存在这种不和谐的关系?正是由于存在这种不和谐,使发动机传递给车轮的驱动力大于驱动车轮与地面的附着力时,车轮就会出现滑转的现象。
一、驱动防滑系统的作用驱动防滑系统能在车轮开始滑转时,降低发动机的输出扭矩,同时控制制动系统,以降低传递给驱动车轮的扭矩,使之达到合适的驱动力,使汽车的起步和加速达到快速而稳定的效果。
二、滑转率及其与路面附着系数的关系汽车在驱动过程中,驱动车轮可能相对于路面发生滑转。
滑转成分在车轮纵向运动中所占的比例称为驱动车轮的滑转率,通常用“S A”表示。
S A=(rω—ν)/rω×100%式中:S A—车轮的滑转率;r—车轮的自由滚动半径;ω—车轮的转动角速度;ν—车轮中心的纵向速度。
当车轮在路面上自由滚动时,车轮中心的纵向速度完全是由于车轮滚动产生的。
此时ν= rω,其滑转率S A=0;当车轮在路面上完全滑转(即汽车原地不动,而驱动轮的圆周速度不为0)时,车轮中心的纵向速度ν=0,其滑动率S A=100%;当车轮在路面上一边滚动一边滑转时,0<S A<100%。
与汽车在制动过程中的滑移率相同,在汽车的驱动过程中,车轮与路面间的附着系数的大小随着滑转率的变化而变化。
在干路面或湿路面上,当滑转率在15%~30%范围内时,车轮具有最大的纵向附着系数,此时可产生的地面驱动力最大。
在雪路或冰路面上时,最佳滑移率在20%~50%的范围内;当滑转率为零,即车轮处于纯滚动状态时,其侧向附着系数也最大,此时汽车保持转向和防止侧滑的能力最强。
电动汽车驱动防滑控制系统设计摘要:电动汽车的驱动防滑控制系统可以对主动轮的传动扭矩进行合理地控制,从而避免主动轮的过度滑动,改善电动汽车的动力性和侧向稳定性,在电动汽车主动安全性方面,一直是一个重要的课题。
通过对驱动轮的打滑和角度加速度的分析,为确保车辆的安全运行提供一种更加实用的控制方案。
关键词:电动汽车;驱动防滑控制;车辆安全引言在平滑路面上起步加速时,车辆的主动轮很容易发生打滑。
在打滑过程中,由于滑移率太高,造成车辆的驱动力、横向力下降,导致车辆转向稳定性、转向控制性下降,对驾驶安全产生不利的影响。
此外,传动轮的打滑也会使其速度急剧增加,从而加重轮胎的磨损。
1、电动汽车驱动防滑控制途径1.1电机转矩调控一般采用电压控制、转速闭环控制和转矩闭环控制等控制方法。
该技术采用PWM技术,对电动机进行 PWM控制,通过对电动机的电压进行控制,从而实现对电动机的驱动扭矩的控制。
但是,这个电压不能比驱动马达的反 EMF高,否则就能控制输出扭矩,以达到最大输出扭矩。
电动机的速度控制就是把电动机的输入速度信号和系统的反馈速度信号进行差分,再进行控制,一般采用 PI或 PID控制。
要求操作者对油门踏板进行非常精细的控制,而人的反应能力有限。
因此,这种方式很难达到想要的结果。
调整电动机的电流,实际上相当于控制电动机的转矩,也就是控制转速回路的误差,从而改变电动机的电流,实现电动机的输出扭矩。
该方法的特点是高效、易于观察[1]。
1.2离合器与变速器控制在传动轮滑动比较大的情况下,可以通过调节离合器啮合度,使其在较大的滑动速度下产生较大的滑动,以减小输出扭矩。
变速器控制一般是指通过对传感器的信号进行处理,从而达到降低扭矩的目的。
通过电子设备自动调整变速箱的传动比,减少了扭矩的输出。
利用上述方法,可以进行传动和防滑控制,但在执行离合器和传动装置的控制时,系统的响应速度不太快。
并且,这种方法将受到很大的损坏,从而限制了这种方法的使用。