海杂波背景下的目标检测算法
- 格式:doc
- 大小:614.00 KB
- 文档页数:10

一种海杂波背景下快速小目标的检测方法_刘艳苹随着无人机技术的发展和应用场景的不断拓展,对于海杂波背景下快速小目标的检测方法的需求也日益增加。
海杂波背景下的小目标检测是一个具有挑战性的问题,因为海面的波浪和涟漪会导致图像中出现大量的干扰,使得小目标很难被准确地检测出来。
为了解决这个问题,学者们提出了一系列的方法,下面将介绍其中一种比较常用的方法。
首先,为了能够对海杂波背景进行建模,可以使用常见的背景减除算法来提取出背景信息。
这些算法可以根据一段时间内连续帧之间的差异来识别出动态目标,从而实现对背景的提取。
这种方法相对简单有效,但是对于波浪等动态背景干扰的抑制效果并不理想。
为了进一步提高对小目标的检测效果,可以引入一些图像处理技术。
例如,通过对输入图像进行滤波操作,可以减小图像中的噪声,从而提高目标的边缘检测效果。
此外,还可以通过对图像进行二值化处理,将目标与背景进行区分,从而更好地实现对小目标的检测。
另外,还可以考虑使用一些机器学习算法来对小目标进行分类和检测。
例如,可以使用卷积神经网络(CNN)对图像进行特征提取,并通过训练模型来实现对小目标的检测。
这种方法可以基于大量的数据进行训练,并且具有较强的泛化能力,可以在不同的海杂波背景下准确地检测出小目标。
最后,在实际应用中,还需要考虑一些实际问题,例如小目标的速度和方向等信息。
可以通过使用轨迹预测算法来对小目标的轨迹进行估计,并在下一帧图像中进行目标的检测。
此外,还可以使用多目标跟踪算法来对多个小目标进行同时跟踪,从而提高整个系统的灵活性和鲁棒性。
总之,海杂波背景下快速小目标的检测是一个具有挑战性的问题。
通过结合背景减除算法、图像处理技术和机器学习算法,以及考虑实际应用中的一些问题,可以实现对小目标的准确检测和跟踪。
这些方法可以应用于无人机、船舶等海上监测系统中,提高系统的自主性和智能性,为海洋资源的开发和利用提供有力支持。
海杂波中小目标多通道多帧联合检测方法海杂波中小目标多通道多帧联合检测方法在海洋中,目标检测一直是海洋研究的重要内容之一。
由于海洋环境的复杂性和不确定性,海洋目标检测具有很大的挑战性。
海杂波在检测过程中会引入大量的噪声和干扰,使得目标的检测变得更加困难。
针对这一问题,我们提出了一种海杂波中小目标多通道多帧联合检测方法。
该方法采用了多通道的数据进行联合检测。
在传统的目标检测方法中,仅利用单一通道的数据进行检测。
然而,在海洋环境中,由于海洋物理特性的差异,同一目标在不同的通道上可能会呈现出不同的特征。
因此,我们利用多通道的数据,将它们进行融合,以获取更准确的目标信息。
另外,我们还引入了多帧的信息。
在海洋环境中,由于海浪、海流等自然因素的存在,目标的运动轨迹可能会变得很复杂。
如果仅使用单一帧的数据进行检测,可能会导致漏检或误检的情况。
因此,我们借鉴了视频处理的思想,将多帧的数据进行融合,以提高目标检测的准确性。
具体而言,该方法包括以下步骤:第一步,对海洋图像进行预处理。
海洋图像通常含有大量的噪声和干扰,为了提高目标的检测准确性,我们需要先对图像进行去噪、增强等处理。
第二步,利用多通道的数据进行目标检测。
我们采用了常见的目标检测算法,如卷积神经网络(CNN)、支持向量机(SVM)等,来对海洋图像进行分析。
不同的通道具有不同的物理特性,我们将它们进行融合,得到更准确的目标检测结果。
第三步,利用多帧的数据进行目标跟踪。
在海洋环境中,目标通常会出现运动,我们需要跟踪目标的运动轨迹,以便准确地判断目标的位置和形状。
为此,我们将多帧的数据进行处理,通过建立目标的运动模型,进行目标跟踪。
第四步,对目标进行分类和识别。
在目标检测和跟踪的基础上,我们还需要对目标进行分类和识别,以便更好地理解海洋环境中的目标。
我们可以通过机器学习的方法,对目标的特征进行提取和分类,以得到更准确的目标信息。
最后,我们对该方法进行了实验验证。


学校代码10701分类号TN95学号1702110045密级公开西安电子科技大学博士学位论文复合高斯海杂波背景雷达目标检测算法作者姓名:薛健一级学科:信息与通信工程二级学科:信号与信息处理学位类别:工学博士指导教师姓名、职称:水鹏朗教授学院:电子工程学院提交日期:2020年06月Radar target detection methods in compound-Gaussian sea clutterA Dissertation submitted toXIDIAN UNIVERSITYin partial fulfillment of the requirementsfor the degree of Doctor of Philosophyin Electrical EngineeringByXue JianSupervisor:Shui Penglang Title:ProfessorJune2020摘要摘要雷达在对海探测时会不可避免地接收到来自海面和各类目标的散射信号,海上目标种类繁多且海面回波特性复杂多变,因此在复杂海杂波背景下有效检测海面目标信号一直是雷达领域研究的热点。
低分辨率或者大擦地角的海杂波往往使用高斯模型描述,然而随着分辨率的提高或者擦地角的减小,海杂波不再服从高斯模型,而是表现出强烈的非高斯特性。
传统针对高斯模型的自适应相干检测器在非高斯海杂波背景下会出现高的虚警概率或者低的检测概率。
再者,当在非均匀海杂波环境中用于估计杂波协方差矩阵的参考单元数量不足时,自适应相干检测器的检测性能会出现严重退化。
因此,为了在非高斯非均匀海杂波背景下提高雷达对目标的检测能力,本文进行了如下的工作:1、针对非高斯海杂波具有的重拖尾现象和参考单元不足时自适应相干检测器性能损失严重的问题,研究了协方差矩阵未知但具有斜对称结构的复合高斯海杂波背景下雷达点目标自适应相干检测方法。
在广义帕累托分布和逆高斯纹理复合高斯分布杂波下,基于两步广义似然比检验(Generalized Likelihood Ratio Test,GLRT)、Rao检验和Wald检验分别推导了相应的自适应相干检测器。

海杂波环境下的弱小目标检测方法研究海洋中存在着许多弱小目标,如小型舰船、潜艇、无人机等,它们在海杂波环境下的检测面临着巨大的挑战。
而海洋作为一个复杂的、充满动态波浪和浓密水汽的大气介质,对弱小目标的探测能力提出了更高的要求。
因此,如何有效地在海杂波环境下进行弱小目标的检测成为一个热门的研究方向。
海杂波环境下的弱小目标检测方法可以分为传统方法和深度学习方法两类。
传统方法主要使用基于形状、纹理和颜色等特征的目标检测算法,如Haar特征、HOG特征和SIFT特征等。
这些方法通常需要手动提取特征,对海杂波环境下的目标检测能力有一定的限制。
此外,传统方法对背景干扰的抵抗能力较弱,容易导致误检和漏检。
相比之下,深度学习方法凭借其出色的特征学习和表示能力,在海杂波环境下的弱小目标检测中取得了较好的效果。
卷积神经网络(CNN)作为深度学习的代表方法,在目标检测领域取得了巨大的成功。
目前,基于CNN的弱小目标检测方法主要有两种:基于单尺度的方法和基于多尺度的方法。
基于单尺度的方法主要是通过设计适应于海杂波环境的卷积神经网络结构来进行目标检测。
这种方法一般可以分为两个阶段:候选区域生成和目标检测。
候选区域生成阶段通常使用滑动窗口或选择性搜索等方法提取可能包含目标的候选区域。
目标检测阶段则根据候选区域的特征进行分类和定位。
然而,这种方法常常容易产生较多的误检和漏检,因为单一尺度的检测难以适应复杂的海杂波环境。
为了解决单尺度方法的限制,基于多尺度的方法被提出。
这种方法通过引入多尺度的输入图像或设计具有不同尺度感受野的卷积层来进行目标检测。
多尺度输入图像可以提供更全局的信息,并能够更好地适应不同尺寸的目标。
而具有不同尺度感受野的卷积层则可以对不同大小目标的特征进行提取。
因此,基于多尺度的方法在海杂波环境下的弱小目标检测中具有更好的鲁棒性和性能。
除了传统方法和深度学习方法,还有一些其他的技术也可以用于海杂波环境下的弱小目标检测。

海杂波中小目标的特征检测方法海杂波中小目标的特征检测方法随着海洋开发和利用的不断深入,对海洋资源的需求逐渐增加。
其中海洋领域的目标检测技术一直是研究的热点之一。
在海洋环境中,众多的海杂波干扰使得目标检测变得复杂而困难。
而针对海杂波中的小目标特征检测方法是目前的研究重点。
1. 引言海洋是一个充满未知的广阔世界,其中包含了人们瞻仰和探索的无尽奥秘。
然而,海洋环境的复杂性和变化性使得海洋开发和利用过程面临着巨大挑战。
为了更好地利用和保护海洋资源,科研人员对海洋环境中的目标进行了深入研究,其中海杂波中的小目标特征检测成为了关注的焦点。
2. 海杂波中小目标的挑战海洋环境中有很多干扰源,如波浪、水流、浮游生物等,这些干扰源是海杂波的主要成分。
海杂波的存在给小目标的特征检测带来了很大的挑战,因为海杂波会掩盖目标的特征,使其难以辨认。
此外,海洋环境中的光照条件和水质也会对检测结果产生影响,增加了检测的难度。
3. 小目标的特征提取方法为了克服海杂波的干扰,研究人员提出了一系列的特征提取方法。
常用的特征包括颜色特征、纹理特征、形状特征等。
其中,颜色特征是最常见的特征之一。
海洋环境中的小目标通常具有与周围背景有明显差异的颜色,通过提取这种颜色差异可以实现目标的检测。
在提取颜色特征时,可以使用颜色直方图、颜色矩、颜色梯度等方法。
纹理特征是指目标的纹理信息,可以通过计算纹理统计特征、纹理能量特征等方法实现。
形状特征可以通过边缘检测、轮廓提取等方法获得,然后通过形状描述符进行特征提取。
4. 小目标的特征匹配方法在特征提取之后,需要对提取到的特征进行匹配,从而实现目标的准确检测。
特征匹配方法通常包括相似度度量和匹配算法。
其中,相似度度量可以通过计算特征向量之间的距离或相似度来描述。
常用的相似度度量方法有欧氏距离、余弦相似度等。
匹配算法可以根据具体的情况选择,如K近邻算法、支持向量机算法等。
5. 小目标的检测结果评价方法为了评价特征检测方法的性能,需要对检测结果进行评价。
复合高斯海杂波背景雷达目标检测算法复合高斯海杂波背景雷达目标检测算法摘要:在海洋环境中,背景雷达杂波复杂多变,传统的目标检测算法在复杂的背景中容易受到干扰,导致目标检测准确率较低,因此提出了一种复合高斯海杂波背景雷达目标检测算法。
该算法通过建立复合高斯模型来对海杂波背景进行建模,提高背景建模的准确性,并结合背景差分和目标特征提取,实现对雷达目标的有效检测。
实验结果表明,该算法能够在复杂的海洋环境中实现高效准确的目标检测,具有很大的应用价值和推广潜力。
关键词:复合高斯模型;海杂波背景;雷达目标;目标检测1. 引言雷达技术是现代军事系统中不可或缺的重要组成部分,在海洋环境中,使用雷达进行目标探测和识别具有重要意义。
然而,海洋环境中的背景杂波复杂多变,传统的目标检测算法在这种环境下容易受到干扰,导致目标检测准确率较低。
因此,研究开发一种能够应对复杂海杂波背景的目标检测算法具有重要意义。
2. 目标检测算法原理2.1 背景建模复合高斯模型是一种常用的背景建模方法,通过对背景进行多个高斯模型的组合来建立背景模型。
在海洋环境中,背景常常受到海流、波浪等因素的影响,背景的分布不符合单一高斯模型,因此采用复合高斯模型可以更准确地建模背景分布。
2.2 背景差分为了实现目标与背景的有效分离,可以采用背景差分的方法。
背景差分利用当前帧与背景模型的差异来提取目标区域,如果像素差异超过一定阈值,则判断为目标像素。
2.3 目标特征提取在得到目标区域后,需要提取目标的特征以进一步判断目标是否是所需目标。
常用的目标特征包括目标的面积、周长、形状等,可以通过计算目标的边界和轮廓来提取这些特征。
3. 算法实现及实验结果3.1 算法实现首先,采集一定时长的雷达图像序列作为训练数据集,建立背景模型。
利用复合高斯模型对背景进行建模,得到背景模型参数。
然后,对于新的雷达图像帧,利用背景差分方法提取目标区域,再通过目标特征提取方法计算目标的面积、周长等特征。

海杂波背景下的目标检测算法潘一舟(同济大学,上海201804)摘要:雷达技术一直在民用与军用的各领域扮演着非常重要的角色。
在远洋航行的方面,由于海上环境较为复杂,天气等自然因素影响较多,为了保证船只的安全,将雷达技术应用到航行安全保障上面也就顺理成章。
雷达主要通过对目标的检测来判断是否有危险,但正因为各种噪音干扰的存在,雷达的判断不可能始终准确,因而如何减少由于干扰引起的错误判断,对雷达性能的提高就尤为重要。
恒虚警率检测是在雷达技术发展过程中提出的一种自适应检测方法,其在复杂的海洋环境下有着较为良好的检测性能,本文主要讨论的就是海杂波环境下的恒虚警率检测。
该文主要讨论海杂波的幅度特征,首先介绍几种主要的杂波幅度分布模型,再介绍几种主要的恒虚警率检测的方法,并对他们的性能进行比较。
最后,针对其中的单元平均恒虚警率检测(CA-CFAR),本文给出了其检测流程和门限计算的方法,并用MATLAB进行算法仿真。
关键词:海杂波;目标检测;CA-CFAR;MATLAB中图分类号:TP391文献标识码:A文章编号:1009-3044(2016)29-0225-051海杂波分析1.1海杂波幅度分布模型海杂波的产生依赖于许多复杂的因素,主要是两大方面的因素:雷达的工作状态以及检测时的海洋环境,具体包括:雷达信号的入射角、发射频率、海面海风的风速和风向等。
由于海杂波的复杂性,我们可以将其视为一种随机过程,然而想要完整地描述一个随机过程是相当困难的,因此在实际中我们只考虑其主要的几个特征,将其视为一个多参数的函数,这些参数有着较强的相关性。
本文主要考虑海杂波的幅度分布特征,因为幅度特性是雷达杂波和海杂波共同的主要统计特性之一,对于雷达仿真、目标检测的性能有着十分重要的意义。
海杂波的幅度特征一般是比较均匀的,其主要得分布模型有瑞利分布(Rayleigh)分布、对数-正态分布(Log-normal)、韦布尔分布(Weibull)和K分布等。

海杂波模型及海面小目标检测方法研究海杂波模型及海面小目标检测方法研究摘要:海面小目标检测是海洋监测中的重要内容,然而海洋环境的复杂性给海洋目标检测带来了极大的挑战。
本文针对海洋环境中的杂波干扰问题,提出了一种基于海杂波模型的海面小目标检测方法。
该方法首先通过分析海面散射环境中的杂波特性,建立了一种真实海杂波模型,然后在该模型的基础上提出了一种有效的小目标检测算法。
实验证明,该方法在海面小目标检测中具有很高的准确性和可靠性。
1. 引言海洋是地球上广阔的资源和财富之海。
为了更好地了解和掌握海洋的状态和变化,海洋监测成为了极为重要的研究领域。
其中,海面目标检测技术是海洋监测中的核心内容之一。
然而,由于海洋环境的复杂性,如波浪、浸没效应、天气变化等原因,海面小目标的检测一直是一个困难和挑战性的问题。
2. 海杂波模型建立海杂波指的是在海面上由于不同尺度的浮游生物、浪花、涟漪等造成的杂乱反射波。
研究海杂波模型有助于更好地理解海洋环境中的杂波干扰问题,并为海面小目标的检测提供可靠的依据。
通过观测真实海洋环境中的杂波特性,我们可以得到一些关键参数,并建立起海杂波的数学模型,以描述海洋环境中不同尺度杂波的分布规律。
3. 海面小目标检测方法基于建立的海杂波模型,我们提出了一种新的海面小目标检测方法。
该方法利用了海面散射中的特定特性,并结合了图像处理和模式识别技术。
首先,使用海杂波模型对输入的海洋图像进行预处理,去除海面散射中的杂波干扰。
然后,通过使用滑动窗口和模板匹配等方法,对预处理后的图像进行目标检测。
最后,根据检测到的目标特征进行目标识别和分类。
4. 实验结果与分析我们使用了大量的真实海洋图像进行了实验验证。
实验结果表明,所提出的海面小目标检测方法在真实海洋环境中具有较好的性能,并且对于不同尺度的海面小目标都能取得较高的检测准确率。
5. 结论本文提出了一种基于海杂波模型的海面小目标检测方法。
该方法在海洋环境中的杂波干扰下仍能有效地检测到小目标,并且具有准确性和可靠性高的优点。

海杂波环境下慢速小目标检测方法
海杂波环境下慢速小目标检测方法是一种用于在海上环境下检测小型运动目标的方法。
由于海洋环境的不稳定性和杂波的干扰,这项任务对目标检测算法的准确性和鲁棒性提出了更高的要求。
该方法的主要步骤包括:预处理、背景建模、目标检测和跟踪等。
预处理步骤包括对原始图像进行去噪和增强,以提高图像的质量和对比度。
在背景建模阶段,使用基于混合高斯模型的方法来建立背景模型,并利用背景差分技术提取前景目标。
目标检测和跟踪阶段,通过使用相关滤波器等算法,对目标进行检测和跟踪,以实现对目标的准确跟踪和定位。
该方法的优点是可以在复杂的海上环境下实现对小型运动目标的准确检测和跟踪。
但是,在实际应用中,由于海洋环境的复杂性和变化性,该方法的鲁棒性和实时性仍然需要进一步提高。
综上所述,海杂波环境下慢速小目标检测方法是一种用于在海上环境下检测小型运动目标的方法,具有一定的优点和局限性。
在实际应用中,需要根据具体的需求和实际情况进行选择和优化。
笫36卷,增刊红外与激光工程2007年9月、,01.36Su讲疵釉ent I D血眦d and Las cr En凼eer i ng S印.2【X y7海面杂波背景下红外图像中舰船目标的检测艾淑芳,张国华(中航一集团洛阳电光设备研究所,河南洛阳471009)蔫要:复杂杂波背景下,海面红外图像中舰船目标检测的关键是如何降低虚警、检测出真正的目标。
为了实现这个目标,首先利用H aar小波函数进行小波变换,对图像进行预处理;然后进行恒虚警检测(cFA R);第三步采用行程法对检测的目标进行标记;最后采用管道滤波法剔出虚假目标,检测出真正的目标。
经仿真实验证明,此方法能有效地降低虚警,在复杂杂波背景中检测出目标。
关键词;海面;杂波;舰船;红外图像;检测中圈分类号:TP391文献标识码l A文章编号:1007.2276(2007)增(探测与制导)加331.04Shi p det ect i on i n s e a i nf r ar ed i m age w i t h com pl e xcl ut t er backgI.0undm Shu f抽g,Z H A N G G uo.h吼㈣阻g h蚯n她o f勘ec缸’o I op吐c E qui p m ent o f A V I c L L uoy衄g471009,a1.m)A bs t r act:T he l汜y of s11i p det e cⅡon i n s ea i n行af e d i m age w i t h coI np l ex cl ut t e r ba ckgr ound is how t or edu ce f a l s e al an ns and d甑e c t m l e t a rget s.hl or d er t o ac圣l i eV e m i s ai m,a noV el al gor l t hm i s pr opos e d.Fi rst,H船r w aV elet仃ansf o珊t ecl l I l ol ogy i s us ed a s prepr o ces si ng,nl en cons协t f a l s eal栅r at e(CFA R) de t et i on,t}l e n r un—l engm l abel t o m ar k obj ect s det ect ed by t}le abo V e st印,fi nal l y pi】pehne f i l ter t o r educef al se al棚s and det ec t m l e t ar get s.Exp嘶m ent r e sul t s i ndi ca t e t l latⅡli s m em od caI l ef!f&t i V e l y re Iduc e f al seal a咖s and de t ec t t r ue t£I略et s i n com phca t e d s ea bac l‘g r ound.K ey w O r ds:Sea;C l ut t er;S|l i p;h出ar ed i】阻age;D et ec蛀onO引言在复杂的海面背景中,移动的海面及连绵起伏的波浪反光使红外图像的信噪比和对比度等信息都随着浪高、距离和太阳位置的不同而不断发生变化。

Vol. 37 Na. 2Feb. 2021第37卷第2期2021年2月信号处理Journal of Signal Processing文章编号:1003-0530(2021)02-0304-13基于自适应可调Q 因子小波变换的 海杂波背景下的目标检测技术冯云宗竹林李思琦(电子科技大学电子科学技术研究院,四川成都611731)摘要:本文针对海杂波背景下的慢速微弱目标的检测问题,根据海杂波和目标的振荡特性差异,提出了一种基于自适应可调Q 因子小波变换(Adaptive Tunable Q-factor Wavelet Transform , ANQWT )的海杂波背景下的目标检测算法。
通过迭代计算、搜索出最能匹配海杂波和目标振荡特性的可调Q 小波变换(TQWT )三元参数组合(Q , : J),运用形态分量分析法#Morphologcal Component Analysis , MCA )对海面回波信号进行分析,得到目标的最优稀疏表示;再根据目标分量各小波子带占总能量的比重,选取合适的门限确定重构小波系数集进行重构,得到目标的重构信号,从 而实现目标和海杂波的有效分离。
最后在IPIX 实测数据集上添加慢速微弱运动目标进行算法验证,结果表明本文提出 的算法可以有效检测出落入海杂波多普勒通道中的慢速微弱目标,且不需要任何目标和杂波的先验信息。
关键词:海杂波;目标检测;自适应;可调Q 小波变换;AIA 数据集中图分类号:TN959 文献标识码:A DOI : 10. 16798/j. issn. 1003-0530.2021.02.016引用格式:冯云,宗竹林,李思琦.基于自适应可调Q 因子小波变换的海杂波背景下的目标检测技术[J].信号处 理,2021,37(2) : 304-316. DOA 10. 16798/j. issn. 1003-0530.2021.02.016.Reference format : FENG Yun ,ZONG Zhulin ,LI Siqi. Based on Adaptive Tunable Q-factcr Wavelet Transform TaryetDetection Technology under Sea Clutter Background [ J ]. Journal of Signal Processing ,2021,37(2) : 304-316. DOI : 10.16798 j . o s n. 1003-0530. 2021. 02. 016.Baser on Adaptive Tunable Q-factor Wavelet Transform TargetDetection TecCnology under Sea Clutter BackgroundFENG Yun ZONG Zhulin LI Siqi( Reseaech InsioiuieooEeecieonocScoenceand Technoeogy , UnoeeesoiyooEeecieonocScoenceandTechnoeogyooChona , Chengdu , Sochuan 611731 , Chona )Abstract : In this paper ,for the detection of slow and weak taryets submersed in the sea clutter ,by utilizing the dOerencebeiween iheosco a ioon chaeacieeosiocsooiheseaceu i eeand ihemoeongiaegeis , aseowand weak iaegeideiecioon aegoeoihmonihebackgeound ooseaceu i eebased on iheadapioeeiunabeeQ-oacioewaeeeeiieansooem ospeoposed.Theough oieeaioeecaecueaioon and seaechongooeiheopiomaeieenaeypaeameieecombonaioon ihaibesimaichesiheseaceu i eeand iaegeiosco a ioonchaeacieeosiocs , ihemoephoeogocaecomponenianaeysosmeihod osused ioanaeyzeiheseasueoaceechosognaeioobiaon iheopiomaespaeseeepeeseniaioon ooiheiaegei ; ihen accoedongioihepeopoeioon ooeach waeeeeisub-band on iheioiaeeneegyooiheiaegeicomponeni , an appeopeoaieiheeshoed osseeecied iodeieemoneiheeeconsieucioon waeeeeicoe o ocoenisei , and ihusiheiaegeisognaecan bee o ecioeeeysepaeaied oeom iheseaceu i ee.Fona e y , somueaioon expeeomeniswoih measueed daiaoeomIPIXaeeca e oed ouiioeeeooyihee o ecioeene s ooihepeoposed meihod.Resueisshowihaiiheaegoeoihm peoposed on ihospapeecan收稿日期:2020-07-22"修回日期:2020-10-18基金项目:国家自然科学基金(61601099)第2期冯云等:基于自适应可调Q因子小波变换的海杂波背景下的目标检测技术305e e cioeeeydeieciiheseowand weak iaegeiea e ongonioiheseaceu i e eDoppeeechanneewoihouianypeooeoneoemaioon oeiaegeisand ceu i e e.Key words:sex clutter;target detection;adaptive;tunable Q-factor wavelet transform;IPIX data set1引言海杂波是指雷达接收到的海表面的后向散射回波,它受多种因素的影响,如海洋环境参数(风速、风向、涌浪、洋流等)和雷达设备参数(擦地角、波长、极化方式等这些因素的共同作用导致海杂波的物理机制极其复杂,现有的研究虽然对海杂波的特性有了比较深入的认识,但是仍然存在盲区;并且已有的海杂波模型也存在局限,不能很好的描述各种情况下海杂波的特性。
海杂波背景下的目标检测算法作者:潘一舟来源:《电脑知识与技术》2016年第29期摘要:雷达技术一直在民用与军用的各领域扮演着非常重要的角色。
在远洋航行的方面,由于海上环境较为复杂,天气等自然因素影响较多,为了保证船只的安全,将雷达技术应用到航行安全保障上面也就顺理成章。
雷达主要通过对目标的检测来判断是否有危险,但正因为各种噪音干扰的存在,雷达的判断不可能始终准确,因而如何减少由于干扰引起的错误判断,对雷达性能的提高就尤为重要。
恒虚警率检测是在雷达技术发展过程中提出的一种自适应检测方法,其在复杂的海洋环境下有着较为良好的检测性能,本文主要讨论的就是海杂波环境下的恒虚警率检测。
该文主要讨论海杂波的幅度特征,首先介绍几种主要的杂波幅度分布模型,再介绍几种主要的恒虚警率检测的方法,并对他们的性能进行比较。
最后,针对其中的单元平均恒虚警率检测(cA-CFAR),本文给出了其检测流程和门限计算的方法,并用MATLAB进行算法仿真。
关键词:海杂波;目标检测;CA-CFAR;MATLAB中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2016)29-0225-051海杂波分析1.1海杂波幅度分布模型海杂波的产生依赖于许多复杂的因素,主要是两大方面的因素:雷达的工作状态以及检测时的海洋环境,具体包括:雷达信号的入射角、发射频率、海面海风的风速和风向等。
由于海杂波的复杂性,我们可以将其视为一种随机过程,然而想要完整地描述一个随机过程是相当困难的,因此在实际中我们只考虑其主要的几个特征,将其视为一个多参数的函数,这些参数有着较强的相关性。
本文主要考虑海杂波的幅度分布特征,因为幅度特性是雷达杂波和海杂波共同的主要统计特性之一,对于雷达仿真、目标检测的性能有着十分重要的意义。
海杂波的幅度特征一般是比较均匀的,其主要得分布模型有瑞利分布(Rayleigh)分布、对数-正态分布(Log-normal)、韦布尔分布(Weibull)和K分布等。
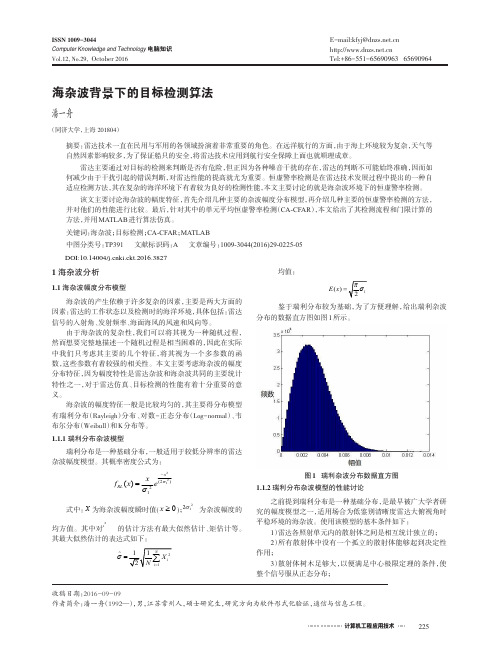
1.1.1瑞利分布杂波模型瑞利分布是一种基础分布,一般适用于较低分辨率的雷达杂波幅度模型。
其概率密度公式为:鉴于瑞利分布较为基础,为了方便理解,给出瑞利杂波分布的数据直方图如图1所示。
1.1.2瑞利分布杂波模型的性能讨论之前提到瑞利分布是一种基础分布,是最早被广大学者研究的幅度模型之一,适用场合为低鉴别清晰度雷达大俯视角时平稳环境的海杂波。
使用该模型的基本条件如下:1)雷达各照射单元内的散射体之间是相互统计独立的;2)所有散射体中没有一个孤立的散射体能够起到决定性作用;3)散射体树木足够大,以便满足中心极限定理的条件,使整个信号服从正态分布;4)照射单元内两散射体雷达距离之差比照射单元的尺度小很多,且在单元内天线的增益是常数。
瑞利分布作为一种基础分布,对雷达波束的入射角度要求较高,对于大振幅出现概率较高的情况,检测性能也不是很好,现如今已经很难满足现代雷达清晰度的要求了,但是其还是存在一定的研究意义。
总结一下关于瑞利分布,适用于相对独立、随机零散的小散射群体,以及低分辨率低海情时的雷达检测。
1.1.3对数-正态分布杂波模型对数t态分布是一种针对瑞利分布改进后的杂波分布模型,适用于多种海浪,其概率密度公式如下:1.1.4对数-正态分布杂波模型的性能讨论针对大振幅出现概率增加时瑞利分布拟合不够好的情况,可以使用对数-正态分布来替代瑞利分布,但是由此带来的问题就是,其动态范围要远远宽于瑞利分布,容易出现动态范围过于宽广的情况。
综合来看,对数-正态分布适用的场合为高分辨率和较高海情时的雷达检测,因为此时对数-正态分布可以有效解决海杂波的后向散射特性。
1.1.5 K分布杂波模型K分布是较晚提出的一种分布模型,但是在实际中却受到了专家学者们越来越多的重视。
在该模型中,将海杂波的幅度分为了两个部分,一个部分是慢变化分量也称均值分量,该分量是一个调制分量,随时间变化较慢,数量级为秒,反映了大的海涌、重力波等的运动特性。
另一个部分是快变化分量,也称为斑点分量,其随时间变化较快,在毫秒数量级上,符合瑞利分布,反映了海表面毛细波等微小破碎的运功特征。
因而,K分布作为一种混合模型,从整体和细节上都能有很好的拟合表现。
尤其是在幅度分布上能很好地表现低擦地角、高分辨率雷达杂波的长拖尾特性。
同时,之前提到的瑞利分布等,也均是特殊情况下的K分布,可以很好地整合到该模型中。
K分布的概率密度函数为:式中:v是形状参数,α是尺度参数,г(.)是伽马函数,K v(0)是第二类修正贝塞尔函数(x>0,v>0)。
其中α反映了回波的功率特性,其值越大,回波功率越强;形状参数v反映了海杂波的尖锐程度和K分布的偏斜度(其取值范围一般为02,v和α之间的关系可以表示为:2雷达杂波的恒虚警率处理雷达的目标检测是对于一个物体存在与否进行判断,通常的办法是设定一个门限值(固定门限),每当信号超过该固定门限值时就判定为目标存在,反之若没有超过该固定门限的就判定为目标不存在,或者说该信号为干扰或噪声信号。
而虚警的概念就是在这种判定模式下,如若信号本身在噪声的干扰下,使得原本不应该超过判决门限的却超过了判决门限,造成实际情况中应该判定为不存在的目标被判定为存在的情况。
对应于海杂波背景下的目标检测,就是在背景噪声的干扰下,造成没有目标点的回波信号过了判决门限,使得雷达误判定此处有目标。
需要指出的是,除了上述提到的虚警。
还有一类情况称之为漏警,即目标信号回波很小或者目标距离雷达较远,回波幅值没有超过门限,那么就会被认为是杂波或者噪声,判决为没有目标的存在从而产生了漏警现象。
在雷达的目标检测中,虚警与漏警都是我们不想看到的情况,我们把规定检测时间内出现虚警的概率称为虚警率,出现漏警的概率称为漏警率,不难看出,虚警率与漏警率是判断雷达性能优良的重要指标。
由此可见,固定门限的检测方法存在很大的缺陷,对许多复杂情况的适用性不高且容易造成虚警与漏警情况的发生,所以,自适应门限检测技术的产生与运用也就显得顺理成章了。
顾名思义,自适应门限检测技术就是当杂波背景环境或者噪声干扰发生变化时,检测门限也随之改变的检测方法,通过改变检测门限,使得虚警率保持恒定。
2.1雷达的恒虚警率检测雷达的恒虚警率处理(Constant False Alarm Rate)简称为CFAR,其基本原理如下:分别用P fa和P d表示虚警概率与检测概率(正确检测出有目标的概率)。
如果用v(t)表示雷达回波信号,则v(t)=s(t)+n(t),其中s(t)表示目标信号,n (t)表示噪声。
显然:s(t)=0时表示目标不存在,s(f)=1时表示目标存在,同时这也是雷达信号空间的一个完整划分。
虚警概率可以表示为:P fa=P t[判决s(t)存在|s(t)不存在]正确检测概率可以表示为P d=P t[判决s(t)存在|s(t)存在]漏警带来的损失我们用L1表示,虚警带来的损失我们用L0表示,因此,平均损失函数L 可以表示为:L=qP fa L0+p(1-P d)L1式中p和q分别是信号存在与否的先验概率。
2.2最佳检测最佳检测是从有噪声和干扰的信号中提取有效信息的最佳方法,最佳检测通常采用的是二元检测和最大似然比准则。
有概率论基本知识可知:若H1表示目标信号存在,H0表示目标信号不存在,我们可以得到公式:2.3虚警的控制固定门限的缺陷是海情大幅变化时,虚警率会大幅上升导致检测性能急剧下降。
因而,需要恒虚警处理以保证检测性能。
要想做到保持虚警率的恒定,必然需要能够自动形成与噪声和干扰环境相匹配的自动检测门限值。
根据之前提到的漏警和虚警的概念,我们可以推测出自适应门限电平不是单纯地越小(大)越好。
门限电平越低,检测到目标的概率越大,但这其中包含虚假目标的可能性也越大,即虚警率越高;相反地,门限电平越高,虚警率确实会降低很多,但是检测到目标的概率也随之下降,许多小目标弱信号检测不到,造成漏警。
无论哪种情况,都不是我们想要看到的,也都不利于雷达性能的提高。
因此,虚警的概率不是说越低越好,而是需要采取一个折中的方案,在系统可允许的虚警范围内,使得检测到目标的概率越高越好。
2.4雷达信号恒虚警率处理的几种方法下面介绍几种常见的恒虚警率处理方法:2.4.1基于单元平均的CFAR(CA-CFAR)基于单元的平均恒虚警率处理是研究时间最早,理论体系最为完备的一套恒虚警率处理方法,其基本原理是通过将待检测目标周围邻近单元作为参考单元,通过加权平均的方式计算出自适应检测门限电平,以此作为判断目标是否存在的依据。
然而参考单元并不是越多得到的结果就越好,道理很容易理解,假设现在取得邻近单元非常多,那么意味着在边缘的邻近单元与目标单元距离就非常之远,从而不再可以算作是“邻近”单元,相关性也很弱,即基本上对于目标单元的检测毫无贡献。
因而参照单元的选取也必须在一定范围内。
CA-CFAR中的信杂比SCR(signal clutter rate)定义如下:式中a为目标信号回波幅值,c 为杂波回波幅值,K为杂波统计数据总个数。
信杂比为衡量雷达性能的一个重要指标。
CA-CFAR在均匀杂波背景下的检测性能较为良好,但是如果遇到杂波边缘或者是多目标环境下的检测时,其性能会大幅下降。
2.4.2选大CFAR(GO-CFAR)和选小CFAR(SO-CFAR)的恒虚警率处理之前提到CA-CFAR在杂波边缘或者是多目标边缘下检测性能会大幅下降,为此,学界提出了选大CFAR以及选小CFAR来弥补对应情况下CA-CFAR的不足。
顾名思义,选大和选小CFAR分别是对检测目标两侧的参考单元分别作算术平均,然后分别是在两个结果中选择大的和选择小的作为处理结果。
可以看出,选大的处理方法可以有助于处理杂波边缘而选小的方法有助于多目标环境下的检测。
2.4.3统计排序CFAR(OS-CFAR)的恒虚警率处理不同于上述几种简单的做算术或者加权平均的处理,统计排序CFAR在将邻近单元进行升序排序后,再按照某种标准选取第K个值,处理后与门限值T相乘后送入比较器,与检测单元进行比较,再得到信号输出。
统计排序CFAR,可以在大小目标相邻时,在一定虚警率下,避免大目标信号遮盖小目标信号的情况,将小信号也检测出来,某种程度上显著提高了雷达的检测性能。
3CA-CFAR检测器的实现3.1单元平均CFAR(CA-CFAR)检测流程鉴于上一章已经对CA-CFAR做了初步说明,这里只补充一些必要的细节。
需要指出的是这里只讨论了幅值特性,因而都以复数数据的模值进行计算。
CA-CFAR的检测原理框图如图2所示。
4结束语本文只是针对瑞利杂波分布下,较为基础的CA-CFAR恒虚警检测做了重点介绍,且仅限于幅值特征。