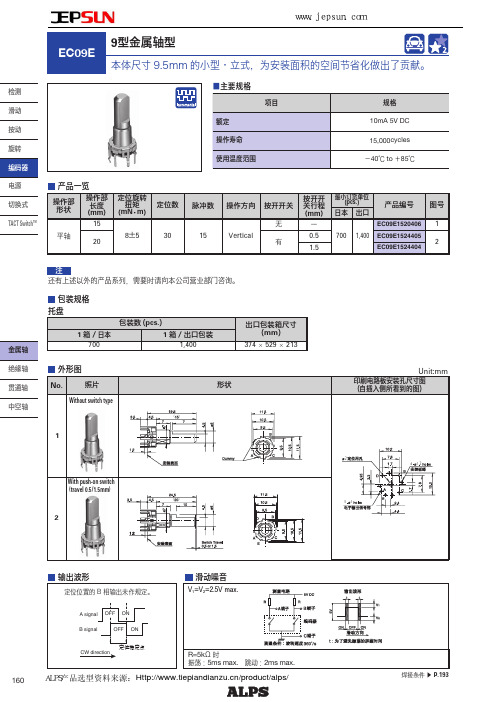
ALPS磁性编码器EM20B
- 格式:pdf
- 大小:1.33 MB
- 文档页数:4

uy20磁芯参数-回复uy20磁芯参数是一种用于电磁器件中的磁性材料,具有多种重要的电磁特性。
接下来,我们将一步一步回答关于uy20磁芯参数的问题,并对其进行详细解释。
第一步:什么是uy20磁芯?uy20磁芯是一种磁性材料,它是由特定的组合材料制成,具有高磁导率和低磁阻的特点。
磁芯通常由硅钢片、镍铁合金或软磁纳米晶体制成,并被广泛应用于变压器、电感器、电动机和电源等电磁器件中,以增强其性能。
第二步:uy20磁芯的主要参数有哪些?uy20磁芯的主要参数包括饱和磁感应强度(Bs)、矫顽力(Hc)、磁导率(μ)、矫顽力(Bm)、相对导磁率(μr)等。
这些参数是评估磁芯性能和应用范围的关键指标。
第三步:饱和磁感应强度(Bs)是什么意思?饱和磁感应强度是指在给定的磁场强度下,磁芯所能达到的最大磁感应强度。
它是衡量磁芯磁性能的重要指标,高饱和磁感应强度意味着磁芯能够在较强的磁场中工作,而不会饱和并失去磁性。
第四步:矫顽力(Hc)是什么意思?矫顽力是指在完全去磁之后,需要施加的磁场强度才能使磁芯重新磁化的能力。
它表示了磁芯抵抗磁场变化的能力,矫顽力越大,磁芯在磁化和去磁过程中的能量损耗越小。
第五步:磁导率(μ)是什么意思?磁导率是指磁芯在单位长度内的磁通量相对于施加的磁场强度的比值。
磁导率越高,磁芯对磁场的响应能力越强,能够更有效地改变磁场的强度。
第六步:矫顽力(Bm)是什么意思?矫顽力是指在磁化的过程中,磁芯所能达到的最大磁感应强度。
它是一个重要的参数,用于评估磁芯在特定条件下的工作能力。
第七步:相对导磁率(μr)是什么意思?相对导磁率是指磁芯在给定磁场强度下相对于真空或空气的导磁率。
它反映了磁芯对磁场的响应程度,值越大表明磁芯更容易在给定磁场中磁化。
第八步:uy20磁芯参数与应用的关系是什么?uy20磁芯参数直接影响着磁芯在电磁器件中的性能和应用范围。
对于应用于变压器的uy20磁芯来说,饱和磁感应强度和相对导磁率是重要的参数,直接影响着变压器的工作频率和功率密度。

*RoHS Directive 2002/95/EC Jan. 27, 2003 including annex and RoHS Recast 2011/65/EU June 8, 2011. Specifi cations are subject to change without notice.The device characteristics and parameters in this data sheet can and do vary in different applications and actual device performance may vary over time.Users should verify actual device performance in their specifi c applications.*Ro H S C O MP L I A NTInsulation Resistance (500 VDC) ......................................................................................................................................................................1,000 megohms Electrical Travel ........................................................................................................................................................................................................Continuous Supply Voltage ........................................................................................................................................................................5.0 VDC ±10 %, 3.3 VDC ±10 %Supply Current .................................................................................................................................................................................................20 mA maximum Output VoltageLow Output Level .................................................................................................................................................................................Vss+0.4 V maximum High Output Level...................................................................................................................................................................................Vdd-0.5 V minimum Output CurrentWith 4.5 VDC Supply Voltage .......................................................................................................................................................................4 mA maximum With 3.0 VDC Supply Voltage .......................................................................................................................................................................2 mA maximum Rise/Fall Time (Incremental Output) ...............................................................................................................................................................500 ns maximum Shaft RPM (Ball Bearing) .........................................................................................................................................................................10,000 rpm maximum Linearity ..............................................................................................................................................................................................................................0.5 %AccuracyNominal ..........................................................................................................................................................................................................±0.7 ° or better Worst Case ...................................................................................................................................................................................................................±1.4 °Output Transition Noise ...................................................................................................................................................................................0.12 ° RMS max.Environmental CharacteristicsOperating Temperature Range ........................................................................................................................................-40 ºC to +125 ºC (-40 °F to +257 °F)Storage Temperature Range ...........................................................................................................................................-55 °C to +125 °C (-67 °F to +257 °F)Humidity -STD-202, Method 103B, Condition B Vibration ..............................................................................................................................................................................................................................15 G Shock ..................................................................................................................................................................................................................................50 G Rotational LifeS Bushing (@1,000 rpm) .................................................................................................................................................................100,000,000 revolutions T & W Bushings (@1,000 rpm with 250 g side load) ........................................................................................................................50,000,000 revolutions IP Rating .............................................................................................................................................................................................................................IP 65Mechanical CharacteristicsMechanical Angle ............................................................................................................................................................................................360 ° Continuous TorqueStarting ....................................................................................................................................................................................43 ±21 g-cm (0.6 ±0.3 oz-in.) Running ...................................................................................................................................................................................29 ±14 g-cm (0.4 ±0.2 oz-in.)Mounting Torque .........................................................................................................................................................................................203 N-cm (18 lb.-in.)Shaft End Play ......................................................................................................................................................................0.30 mm (0.012 ”) T.I.R. maximum Shaft Radial Play ..................................................................................................................................................................0.12 mm (0.005 ”) T.I.R. maximum Weight ..............................................................................................................................................................................................................11 gms. (0.4 oz.)Terminals .........................................................................................................................................................................................Axial, radial or ribbon cable Soldering ConditionManual Soldering ....................................................................................................................96.5Sn/3.0Ag/0.5Cu solid wire or no-clean rosin cored wire 370 °C (700 °F) max. for 3 seconds Wave Soldering .............................................................................................................................................96.5Sn/3.0Ag/0.5Cu solder with no-clean fl ux 260 °C (500 °F) max. for 10 seconds Wash processes .......................................................................................................................................................................................Not recommended Marking ....................................................................................................................................Manufacturer’s trademark, name, part number, and date code.Hardware ....................................................................One lockwasher and one mounting nut supplied with each encoder, except on servo mount versions.Pin ConfigurationOutput Type Pin 1 (DI)Pin 2 (CLK)Pin 3Pin 4 (DO)Pin 5Pin 6Absolute Digital Input Clock GND Digital Output VCC*CS* Can be 5 or 3.3 VDC depending on the version.Specifi cations are subject to change without notice.The device characteristics and parameters in this data sheet can and do vary in different applications and actual device performance may vary over time.Users should verify actual device performance in their specifi c applications.Output Type Waveform and Variant TableApplications■ Material handling equipment ■ Brushless DC motor commutation ■ Robotics ■ Automotive ■ Industrial automation ■ Petroleum refi nery■ Medical ■ Offi ce equipment■Audio and broadcast equipmentD0Daisy Chain Hardware ConfigurationDaisy Chain Mode Data TransferData ContentDescriptionD9:D0Absolute angular position data S1End of offset compensation algorithm S2Cordic overfl ow indicating an error in cordic partS3Linearity alarm S4Increase in magnitude S5Decrease in magnitudeP1Even parity for detecting bits 1-15 transmission errorAbsolute OutputConsult factory for options not shown, including:• Wire lead or cable options • Special shaft/bushing sizes and features• Connectors • Special performance characteristics• Non-standard resolutions • PCB mounting bracketProduct DimensionsShaft Style D (Bushing T)PANEL LAYOUT Shaft Style B (Bushing S)PANEL LAYOUT Specifi cations are subject to change without notice.The device characteristics and parameters in this data sheet can and do vary in different applications and actual device performance may vary over time.Users should verify actual device performance in their specifi c applications.Product DimensionsDIMENSIONS:MM(INCHES)Cable AssemblyMAX.2 PLCS.24 AWG (7X32) STRANDED, TOP COAT 6 CIRCUITS, P.V.C. INSULATIONSpecifi cations are subject to change without notice.The device characteristics and parameters in this data sheet can and do vary in different applications and actual device performance may vary over time.Users should verify actual device performance in their specifi c applications.How To OrderREV. 05/14Specifi cations are subject to change without notice.The device characteristics and parameters in this data sheet can and do vary in different applications and actual device performance may vary over time. Users should verify actual device performance in their specifi c applications.。


磁编码器误差
磁编码器误差是指磁编码器输出信号与实际运动角度或位移之间的差异。
这种误差可能由以下因素导致:
1.磁场误差:由于磁场强度不均匀、磁极磨损、磁体缺陷等因素导致的误差。
2.编码器本身误差:包括光电器件性能、码盘刻线精度、轴承间隙等因素引起的误差。
3.环境因素误差:如温度变化、振动、电磁干扰等导致的误差。
4.安装和使用误差:如轴与编码器不对中、轴承磨损、连接松动等因素引起的误差。
5.磁编码器周边有杂散磁场的影响:由于从永磁体水平方向输入的杂散磁场的影响,会产生角度误差。
6.霍尔元件的安装不对中:由于霍尔元件的安装未对准而产生角度误差。
7.霍尔元件的安装倾斜度:由于霍尔元件的安装倾斜而产生角度误差。
8.磁编码器和电子元件的特性偏差:组成磁性编码器的霍尔元件和AD转换器都是电子元件,其特性偏差可能导致误差。
为了减小磁编码器的误差,可以采取以下措施:
1.选择高质量的磁编码器,选择具有高精度、高可靠性、抗干扰能力强等优点的磁编码器。
2.优化安装和使用环境:避免环境温度变化、振动、电磁干扰等
因素对磁编码器的影响。
3.正确安装和使用:确保磁编码器安装正确,避免轴与编码器不对中、轴承磨损、连接松动等因素引起的误差。
4.定期维护和校准:定期对磁编码器进行维护和校准,确保其正常运转和输出信号的准确性。

20脉冲AB正交脉冲编码器使用说明
产品组成:本编码器套件包括pcb板一块(含四芯电缆),20金属齿码盘一片,尼龙垫柱两个。
安装方法:将pcb板安装在电机副轴伸一侧(即原风机位置),元件面向里,光电开关一侧向外。
用尼龙垫柱垫在pcb安装孔下,用于绝缘和调整pcb与电机端盖间距。
用螺栓和垫圈将金属码盘安装在电机轴端部,保持码盘齿尽量伸入光电开关槽口之中,并居于槽口正中,最后压紧金属码盘。
接线说明:pcb板共四芯引出电缆,棕色为电源正极,绿色为A相脉冲输出,黄色为B相脉冲输出,白色为电源负极。
输入电源:DC5V~DC24V
输出信号:集电极输出(最大允许灌电流100mA)。

Alps磁编码器芯片的工作原理主要基于磁场感应原理。
它通过在芯片内部集成磁电阻效应的传感器,将机械旋转产生的磁场变化转化为电信号。
当磁编码器芯片被安装在机械轴上,机械轴的旋转会导致芯片内部磁电阻传感器的磁场发生变化。
这个变化被转换为电信号,并通过芯片内部的电路处理,最终输出脉冲信号或数字编码信号。
这种脉冲信号或数字编码信号可以用于测量转速、位置等参数,实现精确的控制和监测。
Alps磁编码器芯片具有高精度、高可靠性、长寿命等优点,因此在工业自动化、机器人、汽车电子等领域得到了广泛应用。
以上信息仅供参考,如有需要,建议查阅相关网站。

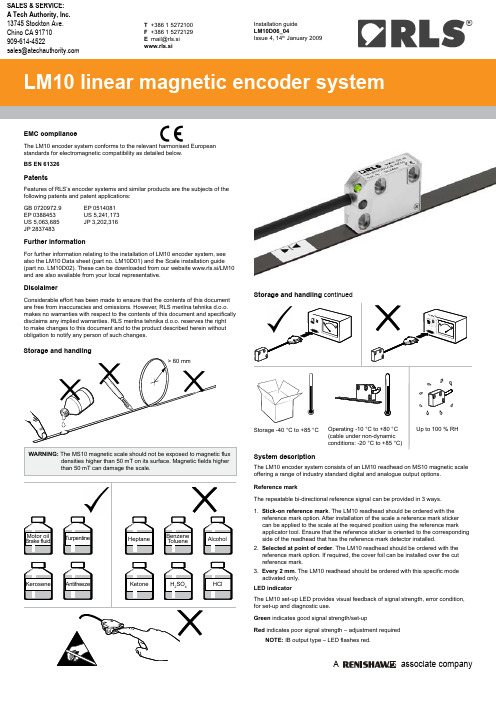
The LM10 encoder system conforms to the relevant harmonised Europeanstandards for electromagnetic compatibility as detailed below.Storage -40 °C to +85 °CSystem descriptionThe LM10 encoder system consists of an LM10 readhead on MS10 magnetic scaleoffering a range of industry standard digital and analogue output options.Reference markThe repeatable bi-directional reference signal can be provided in 3 ways.1. Stick-on reference markTurpentineInstallation guide LM10D06_04bracket (not supplied)2Scale installationReadhead installationStick-on reference mark installation3. Load the scale into the scale guideSeparate the backing paper from the first 40 mm of scale and feed●it into the scale guide.Push the scale carefully through to the end of scale mark,●ensuring that it does not stick to the mounting surface until it is in position 1. Prepare scale and surfaceEnsure scale is cut to correct length and mounting surface has●been cleaned and degreased.2. Install the scale guideMount the scale guide to the readhead bracket as shown.●The LM10ASC00 scale guide is mounted in place of any RLS LM10 readhead and uses motion of the axis to apply MS10 tape scale parallel to the guideway – a one man, one hit operation.5. Remove the scale guideWhen the axis has reached the limit of its travel, lock the axis in●place and unbolt the scale guide from the readhead mounting bracket.6. Ensure complete adhesionApply firm finger pressure along the full length of the scale from●the centre outwards to each end.7. Apply cover foil (if used)Degrease the tape surface with alcohol.●Install as per scale installation instructions in step 3 onwards.●Readheads can be ordered preset to the required resolution or provided so that they can be programmed as needed on the machine to the chosen resolution. This programming is carried out by connecting the readhead to a computer via a programming interface.Once installed the readhead can be easily adjusted on the machine using the strength / set-uprequiredA, B, A-, B- outputs become high impedanceNOTE: IB output type – LED flashes red.2. Remove the backing tape from the reference mark sticker and carefully attach3. Remove the applicator tool leaving the reference mark sticker in the desiredposition.1. Install scale (+ optional cover strip) – place the reference mark applicator toolon scale in the correct orientation/required position along the length.Self-aligning applicator toolMagnetic scalePositive counting30 mm10 mmMachined reference mark (Ri)Position of reference markMin. distance of Ri from left edgeMin. distance of Ri from rightedgeTape length = measuring length + 25 mmMeasuring length®3Dimensions and tolerances in mm.LM10 system dimensionsReadhead installation tolerances Lateral offsetRollRide heightPower supply4.5 V to 7 V – reverse polarity protected; voltage on readhead (see note below)Powerconsumption(without any load)< 30 mA for digital output type < 50 mA for analogue output type Environmental sealingIP68 (according to IEC 60529)TemperatureOperating -10 °C to +80 °C (cable under non-dynamic conditions: -20 °C to +85 °C)Storage-40 °C to +85 °CShock 300 m/s 2, 11 ms (IEC 60068-2-27)Vibration 300 m/s 2, 55 Hz to 2000 Hz (IEC 60068-2-6)Mass Readhead (1 m cable, no connector) 56.4 g, Magnetic scale (1 m) 60 g, Cover foil (1 m) 3.5 gCablePUR high flexible cable, drag-chain compatible, double-shielded8 × 0.05 mm 2; durability: 20 million cycles at 20 mm bend radiusGeneral specificationsElectrical connectionsInner shieldOuter shieldOutput signalsExtension cableCustomer electronics 5 V0 V0.1 to 1.5 mm±3°±1.5 mmInstallation guide LM10D06_044Connections for digital outputs (RS422)Connections for digital outputs (Open Collector NPN)Recommended signal terminationTiming diagramComplementary signals not shownTiming diagramComplementary signals not shownRecommended signal terminationA B ZA B Z®5Timing diagramTiming diagramConnections for analogue outputs (1 V pp)V 0 V 1 V 2+V 0 V 1 V 2-120 ΩRecommended signal termination(V 1+) - (V 1-)(V 2+) - (V 2-)(V 0+) - (V 0-)pp - 1.2 V ppΩ 0.6 V pp - 1.2 V ppwith 120 Ω termination0 V0 V0 VConnections for analogue outputs (12 µA)I 1I 2I 00 µA0 µA 0 µA SALES & SERVICE:A Tech Authority, Inc. 13745 Stockton Ave. Chino CA 91710 909-614-4522************************。
磁环编码器安全操作及保养规程磁环编码器是一种常见的测量设备,主要用于测量机械设备旋转角度、位置等信息。
为了保证测量精度和设备寿命,需要进行安全操作和保养。
下面我们将详细介绍磁环编码器的安全操作规程和保养规程。
安全操作规程1. 避免撞击在安装和使用磁环编码器时,要避免对其造成撞击。
在安装时,应选用适当的安装工具,安装时要遵循正确的安装方法并注意力度和位置,避免磁环编码器被碰撞。
在使用过程中,要避免将物体击打到磁环编码器上,否则会影响其测量精度和稳定性。
2. 防止进水或灰尘磁环编码器内部有许多灵敏和精密的部件,如磁铁、光电器件等。
因此,要防止进水或灰尘进入设备内部。
在安装时,要将磁环编码器安装在防尘、防水的固定器件上,并确保连接线路的密封性。
3. 防止电源电压过高磁环编码器的电源电压应该在规定的范围内。
若电源电压过高,可能会烧坏设备。
因此,在使用时,需要使用指定的电源,并保证电源电压不超过标定范围。
4. 正确连接线路磁环编码器的线路连接正确与否对设备的正常运行有很大影响。
在使用时,应注意线路的正负极连接是否正确,是否导通等。
线路应使用合适的线缆,并注意线缆的防水防尘性。
5. 注意防静电磁环编码器是由许多灵敏的电子元件组成的,易受到静电干扰,从而引起设备故障。
为了防止静电干扰,安装和使用时应采取下列措施:•避免摩擦和碰撞等操作,防止静电的发生;•在接触设备前,先接地,避免自身静电对设备造成影响;•使用静电吸尘器或湿布擦拭设备表面,减少静电干扰的可能性。
保养规程磁环编码器是一种高精度的设备,需要定期进行保养,以保证测量精度和设备寿命。
具体的保养规程如下:1. 清洁设备磁环编码器在使用过程中会积累灰尘、污垢等杂物,影响设备的测量精度和稳定性。
因此,需要定期对设备进行清洁。
清洁时,可以用软布或气压来除去表面的污垢和灰尘。
但切勿使用有机溶剂或强酸强碱溶剂,避免对设备造成损害。
2. 定期校准磁环编码器在使用中,由于工作环境、温度、电源电压等因素的影响,可能会造成测量精度误差。
![用于B0校正灵敏度编码磁共振成像的系统和方法[发明专利]](https://img.taocdn.com/s1/m/f44cc8d5bb0d4a7302768e9951e79b8968026894.png)
专利名称:用于B0校正灵敏度编码磁共振成像的系统和方法专利类型:发明专利
发明人:M·富德勒,E·德维尔特,J-P·F·A·M·埃尔梅斯
申请号:CN201780058887.1
申请日:20170822
公开号:CN109791187B
公开日:
20220329
专利内容由知识产权出版社提供
摘要:本发明提供了一种磁共振成像系统(200、300、400),包括射频系统(216、214),所述射频系统包括用于采集磁共振数据(264)的多个线圈元件(214)。
所述磁共振成像系统还包括用于存储机器可执行指令(260)和脉冲序列命令(262)的存储器(250)。
所述脉冲序列命令被配置用于控制所述磁共振成像系统以根据SENSE成像协议来采集所述磁共振数据。
至少一个修改的展开矩阵是至少部分地使用线圈灵敏度矩阵和体素变形图来计算的。
申请人:皇家飞利浦有限公司
地址:荷兰艾恩德霍芬
国籍:NL
代理机构:永新专利商标代理有限公司
更多信息请下载全文后查看。
编码器如何维护和修理保养编码器维护和修理保养库伯勒kubler编码器由于霍尔编码阵列元件工作在线性状态,库伯勒kubler编码器系统受外界温度、湿度、杂散磁场、电磁干扰等因素的影响比较大。
线性库伯勒kubler编码器同样使用磁栅编码阵列和霍尔编码阵列协调工作,线性编码器的霍尔编码阵列叫作"阅读器", 磁栅编码阵列叫作"感应标尺".但是线性编码器接受的霍尔元件是线性霍尔,当霍尔元件保持确定间隙沿磁栅轴线表面移动时,线性霍尔感测出仿佛正弦波信号的位移量信息。
信号分割器重分正弦波微电流信号,库伯勒kubler编码器可以得到精度特别高的位置信息。
理论上讲,只要信号分割器分割的充分细,系统的辨别率可以特别高。
在实际工况下,由于杂散磁场、电磁干扰等因素影响,系统辨别率只能达到0.17毫米的水平。
库伯勒kubler编码器现场安装的便利和安全、长寿:拳头大小的一个旋转编码器,可以测量从几个到几十、几百米的距离,n个工位,只要解决一个旋转编码器的安全安装问题,可以避开诸多接近开关、光电开关在现场机械安装麻烦,简单被撞坏和遭高温、水气困扰等问题。
由于是光电码盘,无机械损耗,只要安装位置精准,其使用寿命往往很长。
多功能化:除了定位,还可以远传当前位置,换算运动速度,对于变频器,步进电机等的应用尤为紧要。
库伯勒kubler编码器经济化:对于多个掌控工位,只需一个旋转编码器的成本,以及更紧要的安装、维护、损耗成本降低,使用寿命增长,其经济化渐渐突显出来。
库伯勒kubler编码器属精密元件,这紧要由于编码器四周干扰比较严重,比如:是否有大型电动机、电焊机频繁起动造成干扰,是否和动力线同一管道传输等。
无论直线光栅还是轴编码器其Z信号的均可达到同AB信号相同的度,只不过轴编码器是一圈一个,而直线光栅是每隔确定距离一个,用这个信号可达到很高的重复精度。
库伯勒kubler编码器可先用一般的接近开关初定位,然后找为接近的Z信号(每次同方向找),装的时候不要望忘了将其相位调的和光栅相位一致,否则不准。
磁编码指标
磁编码器的性能指标主要包括噪声、分辨率和绝对角度精度。
1. 噪声:所有电子系统在设计时都无法避免的基础问题,主要来源于内部各类有源和无源器件的噪声,如电阻和MOS晶体管的热噪声、1/f 噪声等。
此外,信号在传输过程中如果受到某些干扰,也会以毫无规律的噪声形式表现在最终的输出上。
系统噪声是影响磁编码器芯片能实现的有效分辨率的最大障碍,过大的噪声将使得相邻的步进变得无法分辨,从而降低了实际的有效分辨率。
2. 分辨率:是指磁编码器可以测量的最小角度增量,也决定了编码器的精度。
目前市面上的磁编码器芯片,增量式ABZ输出的有效分辨率一般不超过14位,绝对值角度的有效分辨率一般不超过15位。
3. 绝对角度精度:是指磁编码器在给定条件下测得的角度与实际角度之间的偏差。
该指标通常会影响磁编码器的测量精度。
此外,在选择磁编码芯片时,还需考虑其外部磁路的设计以及配套电路的优化,以保证其整体性能。
以上内容仅供参考,建议查阅专业资料获取更全面的信息。
新品前瞻:堡堡盟EAM580RS功能安全型绝对值编码器佚名
【期刊名称】《智慧工厂》
【年(卷),期】2024()1
【摘要】2024年伊始,堡盟产品家族喜添新成员,它就是已通过安全认证的堡盟新型EAM580RS坚固型编码器。
EAM580RS专为移动机械和户外应用而开发,可显著提高移动机械安全性。
【总页数】1页(P30-30)
【正文语种】中文
【中图分类】TN7
【相关文献】
1.堡盟:绝对值编码器EAL580
2.“坚强”的编码器保证可靠生产——堡盟HDmagMHAD——附带额外增量信号输出的高分辨率无轴承绝对值编码器经久耐用节省空间
3.推动港口物流迈向智能化——堡盟MAGRES EAM580R 磁式绝对值编码器应用在港口重载AGV小车
4.可靠的伙伴——堡盟MAGRES EAM360绝对值编码器为AGV小车提供角度测量帮助
5.堡盟EAM 580/360磁式绝对值编码器
因版权原因,仅展示原文概要,查看原文内容请购买。
172
TACT Switch TM
检测旋转
电源切换式滑动按动
绝缘轴贯通轴中空轴
1. 本产品使用了霍尔IC ,请注意静电造成的损坏。
2. 轴形状等可定制。
注
托盘
包装规格焊接条件 ▲
P.193
/product/alps/
ALPS产品选型资料来源:
173
TACT Switch TM
检测旋转
电源切换式
按动
滑动
绝缘轴贯通轴中空轴
20型金属轴磁式
/product/alps/
ALPS产品选型资料来源:
156
TACT Switch TM
检测旋转编码器电源
切换式滑动按动金属轴绝缘轴贯通轴中空轴
编码器
型金属轴
11mm size
20mm size
系列
EC111
EC11EH
EC11K
EC11J
EC20A/RK203
EM20B
照片
输出自动复位开关增量
(A, B, C 3相输出)
增量(A, B, 2相输出)
轴的形态1轴端子安装方法Vertical
脉冲数/定位数
-6×ABC / 18
10×ABC / 309 / 1815 / 30
18 / 1840 / 40
特长
---
表面贴装
-可实现磁式LED 显示
外形尺寸(按键尺寸)(mm)
W 11.7
20.2
20D 1312
14.2
19.222.25H
5
4.5
1013使用温度范围
-40℃ to + 85℃
-30℃ to + 80℃
-10℃ to + 70℃操作寿命15,000 cycles
30,000 cycles
100,000 cycles
30,000 cycles
500,000 rotations
车用产品●
●
●
●
●
-
生命周期
电性能
额定10mA 5V DC 1mA 5V DC 10mA 5V ±5% DC 最大/最小工作电流
(电阻负载)
10mA / 1mA -
15mA / -
绝缘电阻100M Ω min. 250V DC
10M Ω min. 50V DC 100M Ω min. 250V DC 耐电压
300V AC for 1 minute or 360V AC for 2s
300V AC for 1 minute
or 360V AC for 1s 50V AC for 1 minute or 60V AC for 2s 300V AC for 1 minute or 360V AC for 2s
机械性能
旋转扭矩(Without detent ) 3 to 30mN ・m
----7mN ・m max.定位旋转扭矩-
10±7mN ・m
12±5mN ・m
40±20mN ・m
8±5mN ・m
轴推拉强度100N
轴形状平轴, 槽轴, 锯齿轴平轴端子形状插入式
回流
插入式
开关名称
按开开关附属开关规格
回路·接点数单极单投(按开)
行程(mm)0.5±0.3 1.5±0.50.5±0.3 1.5±0.50.5±0.3 1.5±0.50.5±0.3
1.5±0.50.5致动力(N)
6 4±264±25±24±25±24±2
6±3额定0.1A 5V DC
(500μA 5V DC min. ratings )0.1A 5V DC (0.1mA 5V DC min. ratings )0.5A 16V DC
(1mA 16V DC min. ratings )
0.1A 5V DC
接触电阻初期 100m Ω max . 寿命后 200m Ω max.
操作寿命20,000 times min.
1,000,000 times min.100,000 times min.1,000,000 times min.100,000 times min.20,000 times min.25,000 times min.
页
161
170
172
● 编码器 焊接条件 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・193● 编码器 使用时的注意事项 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・194注
表中的●符号表示适用于系列内的全部产品。
+ 2.5− 2
+ 2.5
− 2+ 0.4
− 0.3
■ 产品系列一览
/product/alps/
ALPS产品选型资料来源:
193
TACT Switch TM
检测旋转
电源
切换式滑动按动
浸焊方式的参考举例
回流方式的参考举例手工焊接方式的参考举例
温度分布
1. 本产品,在只有红外线的回流焊接炉中,有焊接不附着的可能,所以请使用温风回流焊接炉,或红外线+温风回流焊接炉。
2. 上图所示温度是采用温风回流焊接方式时的电位器端子部的最高温度。
因为根据电路板的材质,大小,厚度等的不同,电路板温 度和电位器表面温度有相差很大的可能,请注意,电位器表面温度不要超过250℃。
3. 根据回流焊接槽的种类,条件不同结果不同,请事先充分进行确认之后使用。
注
300200
100
Room
T e m p e r a t u r e (˚C )
/product/alps/
ALPS产品选型资料来源:。