毕业设计_神经网络控制算法仿真
- 格式:doc
- 大小:1.12 MB
- 文档页数:43
摘要目前,由于PID结构简单,可通过调节比例积分和微分取得基本满意的控制性能,广泛应用在电厂的各种控制过程中。
电厂主汽温被控对象是一个大惯性、大迟延、非线性且对象变化的系统,常规汽温控制系统为串级PID控制或导前微分控制,当机组稳定运行时,一般能将主汽温控制在允许的围。
但当运行工况发生较大变化时,却很难保证控制品质。
因此本文研究基于BP神经网络的PID控制,利用神经网络的自学习、非线性和不依赖模型等特性实现PID参数的在线自整定,充分利用PID和神经网络的优点。
本处用一个多层前向神经网络,采用反向传播算法,依据控制要时输出Kp、Ki、Kd,依次作为PID控制器的实时参数,代替传统PID参数靠经验的人工整定和工程整定,以达到对大迟延主气温系统的良好控制。
对这样一个系统在MATLAB平台上进行仿真研究,仿真结果表明基于BP神经网络的自整定PID控制具有良好的自适应能力和自学习能力,对大迟延和变对象的系统可取得良好的控制效果。
关键词:主汽温,PID,BP神经网络,MATLAB仿真ABSTRACTAt present, because PID has a simple structure and can be adjusted proportional 、integral and differential to satisfactory control performance, it is widely used in power plants of various control process. The system of power plant main steam temperature is an large inertia、big time-delayed and nonlinear dynamic system. Conventional steam temperature control system adopted cascade PID control or the differential control of lead before. When the unit is stable, these methods will control the steam temperature in a certain range ,but when operating conditions changed greatly, it is difficult to ensure the quality of control. This article studies PID control based BP neural network . Using such characteristics of neural network self-learning, nonlinear and don't rely on model realize PID parameters auto-tuning. It can make full use of the advantages of PID and neural network. Here, we use a multilayer feedforward neural network using back propagation algorithm. This net can real-time output Kp, Ki, Kd as the PID controller parameters , insteading of the traditional PID parameters determined by experience, so it can obtain good control performance .For such a system ,we can simulate in MATLAB simulation platform. The simulation results show that the PID control based BP neural network has good adaptive ability and self-learning ability. For the system of large delay and free-model can obtain good control effect.KEY WORDS: main steam temperature ,PID ,BP neural network, MATLAB simulation目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 选题背景和意义 (1)1.2 国外研究现状 (1)1.3 立论依据 (5)1.4 本文所做的主要工作 (6)第二章神经网络的基本原理 (8)2.1 人工神经元模型 (8)2.2 神经网络的学习方式和学习规则 (9)2.2.1 神经网络的学习方式 (9)2.2.2 神经网络的学习规则 (9)2.3 神经网络的特点及应用 (10)2.4 BP神经网络 (11)2.4.1 BP神经网络的结构 (11)2.4.2 BP神经网络的算法 (12)2.5 本章小结 (16)第三章基于BP神经网络的PID控制 (17)3.1 PID控制器的离散差分方程 (17)3.2 基于BP神经网络的PID整定原理 (18)3.3 基于BP神经网络的PID控制算法流程 (22)3.4 本章小结 (22)第四章基于BP神经网络的PID控制在主汽温控制系统中的应用 (23)4.1 主汽温的控制任务 (23)4.2 主汽温被控对象的动态特性 (23)4.3 主汽温控制策略 (24)4.3.1 主汽温控制信号的选择 (24)4.3.2 主汽温控制的两种策略 (26)4.4仿真分析 (27)4.5 本章总结 (34)结论与展望 (35)参考文献 (37)致 (39)第一章绪论1.1 选题背景和意义在控制系统设计中,最主要而又最困难的问题是如何针对复杂、变化及具有不确定性的受控对象和环境作出有效的控制决策。

毕业论文(设计)开题报告题目名称神经网络PID控制系统设计与仿真学生姓名所学专业应教042学号指导教师姓名所学专业自动控制职称完成期限一、选题的目的意义PID控制是最早发展起来的控制策略之一,由于其算法简单、鲁棒性好和可靠性高,被广泛应用于过程控制和运动控制中,尤其适用于可建立精确数学模型的确定性控制系统。
然而实际工业生产过程往往具有非线性、时变不确定性,难以建立精确的数学模型,应用常规PID控制器不能达到理想的控制效果,而且在实际生产现场,由于受到参数整定方法繁杂的困扰,常规PID控制器参数往往整定不良、性能欠佳,对运行工况的适应性很差。
神经网络具有很强的非线性映射能力、自学习能力、联想记忆能力、并行信息处理方式及优良的容错性能。
为了克服上述传统PID控制的弱点,本作品将智能控制理论中广泛研究的神经网络和PID控制器结合起来,使它对于工业控制中的复杂系统控制有着更好的控制效果,有效的改善了由于系统结构和参数变化导致的控制效果不稳定。
二、国内外研究综述20世纪80年代,随着神经网络在世界范围内的复苏,国内也逐步掀起了研究热潮。
1989年10月和11月分别在北京和广州召开了神经网络及其应用讨论会和第一界全国信号处理—神经网络学术会议;1990年2月由国内8个学会召开“中国神经网络首届学术会议”。
这次会议以“八学会联盟,探智能奥秘”为主题,收到了300多篇学术论文,开创了中国神经网络及神经计算机方面科学研究的新纪元;2004年10月在合肥召开的“人工神经网络学术会议”已是第14届学术年会了;2004年8月在中国大连召开的ISNN2004国际会议,引起了国内外神经网络研究者的广泛关注,产生了较大的影响;另外,国内外许多相关的学术会议都设有人工神经网络专题,如国内的WCICA﹑CIAC﹑CDC﹑CCC﹑CAA国外的ACC﹑CCA﹑IDEAC等。
经过十几年的发展,中国学术界和工程界在人工神经网络的理论研究和应用方面取得了丰硕成果,学术论文﹑应用和研究人员逐年增加。
基于BP神经网络的自整定PID控制仿真一、实验目的1.熟悉神经网络的特征、结构及学习算法。
2.通过实验掌握神经网络自整定PID的工作原理。
3.了解神经网络的结构对控制效果的影响。
4. 掌握用Matlab实现神经网络控制系统仿真的方法。
二、实验设备及条件1.计算机系统2.Matlab仿真软件三、实验原理在工业控制中,PID控制是工业控制中最常用的方法。
这是因为PID控制器结构简单,实现简单,控制效果良好,已得到广泛应用。
但是,PID具有一定的局限性:被控制对象参数随时间变化时,控制器的参数难以自动调整以适应外界环境的变化。
为了使控制器具有较好的自适应性,实现控制器参数的自动调整,可以采用神经网络控制的方法。
利用神经网络的自学习这一特性,并结合传统的PID控制理论,构造神经网络PID控制器,实现控制器参数的自动调整。
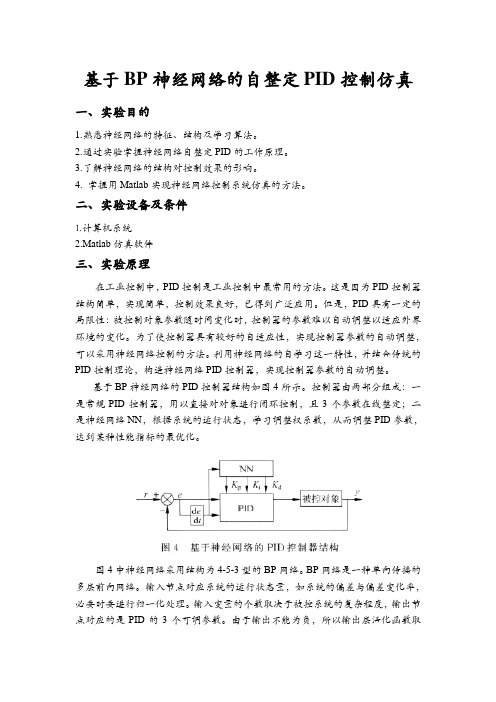
基于BP神经网络的PID控制器结构如图4所示。
控制器由两部分组成:一是常规PID控制器,用以直接对对象进行闭环控制,且3个参数在线整定;二是神经网络NN,根据系统的运行状态,学习调整权系数,从而调整PID参数,达到某种性能指标的最优化。
图4中神经网络采用结构为4-5-3型的BP网络。
BP网络是一种单向传播的多层前向网络。
输入节点对应系统的运行状态量,如系统的偏差与偏差变化率,必要时要进行归一化处理。
输入变量的个数取决于被控系统的复杂程度,输出节点对应的是PID的3个可调参数。
由于输出不能为负,所以输出层活化函数取2()(1)()(1)1(1)a k y k y k u k y k -=+-+-非负的Sigmoid 函数,隐含层取正负对称的Sigmoid 函数。
本系统选取的BP 网络结构如图5所示。
网络的学习过程由正向和反向传播两部分组成。
如果输出层不能得到期望输出,那么转入反向传播过程,通过修改各层神经元的权值,使得误差信号最小。
输出层节点分别对应3个可调参数K p 、K i 、K d 。
神经网络控制算法仿真1.确定需求和目标:首先要明确仿真的目标和需求,例如控制系统的稳定性、响应速度等。
根据需求选择合适的控制算法和网络结构。
2.构建模型:根据实际控制系统的特点和要求,建立仿真模型。
模型可以包括物理系统、传感器和执行器等组成部分,并且模型的复杂程度应该与实际情况相符。
3.设计网络结构和参数:确定神经网络的结构和参数。
可以根据问题的复杂性选择适当的网络结构,如前馈神经网络、循环神经网络、卷积神经网络等,然后初始化网络参数。
4.生成训练数据集:根据模型和仿真的环境,生成训练数据集。
数据集应该包含输入和相应的输出,以便用于网络的训练和优化。
5.网络训练:使用生成的训练数据集对神经网络进行训练。
可以使用常见的反向传播算法或其他训练方法来更新网络的权重和偏置。
训练的目标是使网络输出接近于期望输出,并且不断优化网络性能。
6.仿真和分析:使用训练好的神经网络模型对仿真模型进行仿真和分析。
将输入数据输入到神经网络中,获取神经网络的输出结果,并与期望输出进行比较。
根据比较结果,可以评估神经网络控制算法的性能和效果。
7.优化和改进:根据仿真和分析的结果,可以对神经网络控制算法进行优化和改进。
可以调整网络结构、训练参数、模型参数等,以改善网络的控制性能。
通过以上步骤,可以完成神经网络控制算法的仿真。
仿真可以帮助我们更好地理解和评估控制算法的性能,并且可以为实际系统的应用提供指导和参考。
此外,仿真还可以用于探索和研究新的控制算法和网络结构,促进控制理论的发展和创新。
总结起来,神经网络控制算法的仿真是一种通过构建合适的模型和算法,模拟神经网络在控制系统中应用和优化的方法。
通过仿真和分析,可以评估和改善控制算法的性能,并为实际系统的应用提供指导和参考。
仿真还可以用于探索和研究新的控制算法和网络结构,推动控制理论的发展和创新。

华北电力大学毕业设计(论文)题目基于RBF神经网络整定的PID控制器设计及仿真基于RBF神经网络整定的PID控制器设计及仿真摘要目前,因为PID控制具有简单的控制结构,可通过调节比例积分和微分取得基本满意的控制性能,在实际应用中又较易于整定,所以广泛应用于过程控制和运动控制中,尤其在可建立精确模型的确定性控制系统中应用比较多。
然而随着现代工业过程的日益复杂,对控制要求的逐步增高(如稳定性、准确性、快速性等),经典控制理论面临着严重的挑战。
对工业控制领域中非线性系统,采用传统PID 控制不能获得满意的控制效果。
采用基于梯度下降算法优化RBF神经网络,它将神经网络和PID控制技术融为一体,既具有常规PID控制器结构简单、物理意义明确的优点,同时又具有神经网络自学习、自适应的功能。
因此,本文通过对RBF神经网络的结构和计算方法的学习,设计一个基于RBF神经网络整定的PID控制器,构建其模型,进而编写M语言程序。
运用MATLAB软件对所设计的RBF神经网络整定的PID控制算法进行仿真研究。
然后再进一步通过仿真实验数据,研究本控制系统的稳定性,鲁棒性,抗干扰能力等。
关键词:PID;RBF神经网络;参数整定SETTING OF THE PID CONTROLLER BASED ON RBF NEURAL NETWORK DESIGN AND SIMULATIONAbstractAt present, because the PID control has a simple control structure, through adjusting the proportional integral and differential gain basic satisfactory control performance, and is relatively easy to setting in practical application, so widely used in process control and motion control, especially in the accurate model can be built more deterministic control system application. With the increasingly complex of the modern industrial process, however, increased step by step to control requirements (e.g., stability, accuracy and quickness, etc.), classical control theory is faced with severe challenges. Non-linear systems in industrial control field, using the traditional PID control can not obtain satisfactory control effect. Optimized RBF neural network based on gradient descent algorithm, it will be integrated neural network and PID control technology, with a conventional PID controller has simple structure, physical meaning is clear advantages, at the same time with neural network self-learning, adaptive function. Therefore, this article through to the RBF neural network structure and the calculation method of learning, to design a setting of the PID controller based on RBF neural network, constructs its model, and then write M language program. Using the MATLAB software to design the RBF neural network setting of PID control algorithm simulation research. Data and then further through simulation experiment, the control system stability, robustness, anti-interference ability, etc.Keywords: PID; RBF neural network; Parameter setting目录摘要 (Ⅰ)Abstract (Ⅱ)1 绪论 (1)1.1 课题研究背景及意义 (1)1.2神经网络的发展历史 (3)2 神经网络 (6)2.1神经网络的基本概念和特点 (6)2.2人工神经网络构成的基本原理 (7)2.3神经网络的结构 (8)2.3.1前馈网络 (8)2.3.2 反馈网络 (8)2.4神经网络的学习方式 (9)2.4.1监督学习(有教师学习) (9)2.4.2非监督学习(无教师学习) (9)2.4.3再励学习(强化学习) (9)2.5 RBF神经网络 (10)2.5.1 RBF神经网络的发展简史 (10)2.5.2 RBF的数学模型 (10)2.5.3被控对象Jacobian信息的辨识算法 (11)2.5.4 RBF神经网络的学习算法 (12)2.6 本章小结 (14)3 PID控制器 (14)3.1 PID控制器简介 (14)3.2 经典PID控制原理 (14)3.3 现有PID控制器参数整定方法 (16)3.4 PID控制的局限 (17)3.5本章小结 (17)4 基于RBF神经网络整定的PID控制器设计 (17)4.1 RBF神经网络的PID整定原理 (17)4.2 神经网络PID控制器的设计 (18)4.3 本章小结 (19)5 仿真分析 (19)5.1 系统的稳定性分析 (19)5.2 系统抗干扰能力分析 (21)5.3 系统鲁棒性分析 (22)5.4 本章小结 (24)结论 (25)参考文献 (26)致谢 (27)附录仿真程序 (28)1 绪论1.1 课题研究背景及意义PID控制器(按比例、积分和微分进行控制的调节器)是最早发展起来的应用经典控制理论的控制策略之一,是工业过程控制中应用最广泛,历史最悠久,生命力最强的控制方式,在目前的工业生产中,90%以上的控制器为PID控制器。

神经网络PID控制器的设计与仿真首先,我们需要了解PID控制器的基本原理。
PID控制器由比例、积分和微分三部分组成,通过计算控制量与目标值之间的误差,并根据误差的大小来调整控制量,从而实现系统稳定控制。
然而,传统的PID控制器需要事先知道系统的数学模型和参数,对于复杂的系统来说往往比较困难。
1.数据采集:首先,需要采集系统的输入和输出数据,包括输入信号和对应的输出响应。
这些数据将被用来训练神经网络模型。
2.网络结构设计:根据系统的特点和需求设计神经网络的结构。
一般来说,神经网络PID控制器采用三层结构,包括输入层、隐藏层和输出层。
其中,输入层接收输入信号,隐藏层进行神经网络的非线性变换,输出层输出控制量。
3.网络训练:利用采集的数据对神经网络进行训练。
训练的目标是使神经网络的输出与期望输出之间的误差最小化。
一般采用反向传播算法进行网络训练。
4. 参数调整:在网络训练完成后,需要对PID控制器的参数进行调整。
一般来说,比例系数Kp可以通过经验法则或试验法调整,积分系数Ki可以通过Ziegler-Nichols方法或试验法进行调整,微分系数Kd可以通过试验法或根据系统的特性进行调整。
5.系统仿真:将设计好的神经网络PID控制器和调整后的参数应用于系统仿真。
通过对仿真结果的分析,得出控制效果,并进一步调整参数,直到满足控制要求。
在设计和仿真过程中,需要注意以下几点:1.数据的准确性和充分性:采集的数据需要准确反映实际系统的动态特性,且要充分多样化,以覆盖系统在不同工况下的响应情况。
2.神经网络的训练时间和精度:神经网络的训练时间和精度会直接影响到控制器的性能。
需要根据实际需求进行权衡,选择合适的网络结构和训练算法。
3.参数调整的迭代过程:参数调整是一个迭代的过程,需要通过与仿真结果的对比来逐步优化参数,直到达到满意的控制效果为止。
4.系统模型的确定性:神经网络PID控制器需要基于一个确定的系统模型进行设计和仿真。

东南大学自动化学院智能控制概论神经网络学习算法研究学院:姓名:学号:日期:目录1任务要求叙述 .....................................................错误!未定义书签。
2系统分析及设计原理 .........................................错误!未定义书签。
3设计实现 ..............................................................错误!未定义书签。
4 仿真验证 (6)5讨论与分析 ..........................................................错误!未定义书签。
一.任务要求叙述( 1)任务(a)运行算法,观察和分析现有学习算法的性能;clear all;close all;nu=20;pi=3.1415926;for i=1:nup(i)=2*pi*i/nu;t(i)=0.5*(1+cos(p(i)));endminmax=[min(p(:)) max(p(:))]net = newff([ 0 7],[6 1],{'logsig' 'purelin'},'traingd');% traingd traingdm trainlmnet.trainParam.epochs = 10000;net.trainParam.goal = 0.0001;net.trainParam.show=200;net.trainParam.lr=0.1;net.trainParam.mc=0.6; %0.9 default value; available for momentumnet = train(net,p,t);y1 = sim(net,p);figure(2);plot(p,t,'*-',p,y1,'r--')%************** test data ******************nu2=nu*3/2;for i=1:(nu2)p2(i)=2*pi*i/(nu2);t2(i)=0.5*(1+cos(p2(i)));endy2 = sim(net,p2);figure(3);plot(t2,'*-');hold on; plot(y2,'r');xlabel('times');ylabel('outputs');figure(4);plot(t2-y2);xlabel('times');ylabel('error');(b)为了进一步提高学习逼近效果,可以采取那些措施,调节规律如何?根据所提的每种措施,修改算法程序,给出仿真效果验证、过程以及相应的曲线图,给出适当的评述;(c)联系、结合前向神经网络的算法样本学习、测试等过程,谈谈本人对神经网络系统的一些认识和看法。
1 绪论随着现代化大生产的发展,电子线路故障诊断技术的研究越来越重要。
根据电子线路的特点可将电子线路故障诊断分为模拟电路的故障诊断和数字电路的故障诊断。
在现代电子设备中,绝大部分电子设备故障是由于模拟电路故障导致的,可以说,模拟电路的可靠性几乎决定了电子设备的可靠性。
1.1 模拟电路故障诊断的背景意义目前,模拟电路在航天、通信、自动控制、家用电器等许多方面得到广泛地应用。
随着电子技术的发展,模拟电路的集成程度越来越高,规模越来越大。
因此,对模拟电路的工作的有效性、可靠性、可维修性等提出了更高的要求。
在模拟电路故障发生后,要求能及时将导致故障的原因诊断出来,以便检修和替换。
对模拟电路的生产部门来说,同样也要求能及时诊断出故障,以便改进工艺,提高产品的合格率。
对于某些重要设备中的模拟电路,还要求进行故障的预测,即对正常工作中的模拟电路进行不断的检测,在元件发生故障前就进行替换,以避免故障的发生。
根据电子技术的发展状况,由以下三点说明模拟电路故障诊断技术的紧迫性:第一,微电子学时代的到来,电子线路的复杂性和密集性明显增加, 成千上万个电路元器件集成在一个小芯片上,而对这些电路元器件的测试仅限于为数有限的引出端子之上,如此,通常的测量,微调的手段将不再实用甚至无济于事。
第二,在无线电电子系统中, 数字电路不能完全取代模拟电路,数字电路的故障诊断方法也不能取代模拟电路的故障诊断方法。
第三,现代电子系统复杂度的增加,系统的可靠性显得更为重要,因此,必须提高电子系统的可靠性。
综上所述,工业生产对模拟电路提出了新的要求,微电子技术的快速发展对模拟电路的测试和诊断也提出迫切的要求,这就使得科技人员不得不进一步探索模拟电路的测试和诊断上的新理论和新方法,研发新的测试和诊断设备以适应时代的需求。
所以,开展模拟电路故障诊断的研究是一项非常有意义的课题。
1.2 模拟电路故障诊断的发展与现状相对于数字电路故障诊断而言,模拟电路故障诊断的发展较为缓慢,其中主要原因有以下六点:1)故障状态的多样性。
神经网络PID控制策略及其Matlab仿真研究摘要:本文讨论了神经网络PID控制策略,利用神经网络的自学习能力进行PID控制参数的在线整定,并使用Matlab软件进行了仿真研究。
仿真结果表明,神经网络PID控制器参数调整简单,具有很高的精度和很强的适应性,可以获得满意的控制效果。
关键词:神经网络,BP网络,PID,参数整定,仿真Abstract: This paper discusses the nerve network PID control strategy, makes use of the study ability of the nerve network to turning the PID control parameters, and proceeds the simulation research using matlab software. From the simulation results, it is can be shown that Neural Network PID controller have the higher accuracy and stronger adaptability, and can get satisfied control result.Key word: neural network, BP neural network, PID, parameter turning, simulation1.引言PID控制由于其具有直观性好、实现简单、可靠性高以及强鲁棒性等优点,在工业控制中得到广泛的应用,尤其适用于建立了精确数学模型的确定性系统。
然而常规PID控制效果的优劣直接取决于控制参数选取的好坏,而传统方法是在获取控制对象数学模型的基础上,根据某一整定原则来确定PID参数,但现代工业过程机理复杂,大都存在着非线性、时变、变参数、变结构等不确定性,难以确定精确的数学模型,利用常规的PID控制很难获得满意的控制效果。
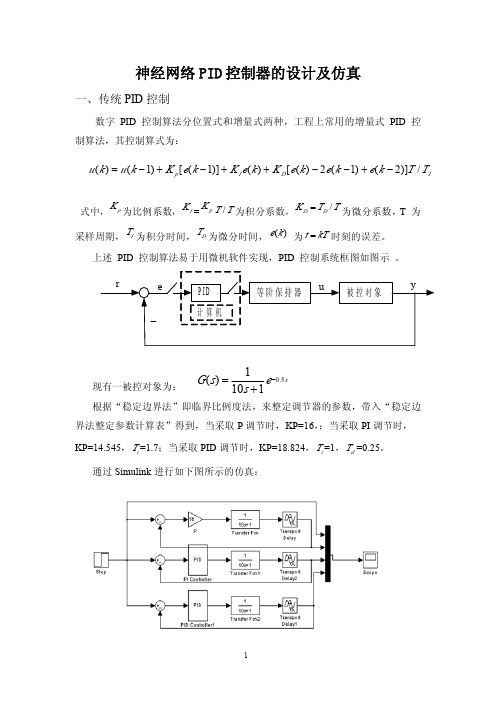
se s s G 5.01101)(−+=()(1)[(1)]()[()2(1)(2)]/p I D Iu k u k K e k K e k K e k e k e k T T =−+−++−−+−神经网络PID 控制器的设计及仿真一、传统PID 控制数字PID 控制算法分位置式和增量式两种,工程上常用的增量式PID 控制算法,其控制算式为:式中,pK 为比例系数,I K =p K /T T为积分系数,/D D K T T =为微分系数,T 为采样周期,IT 为积分时间,DT 为微分时间,()e k 为t kT =时刻的误差。
上述PID 控制算法易于用微机软件实现,PID 控制系统框图如图示。
现有一被控对象为:根据“稳定边界法”即临界比例度法,来整定调节器的参数,带入“稳定边界法整定参数计算表”得到,当采取P 调节时,KP=16,;当采取PI 调节时,KP=14.545,i T =1.7;当采取PID 调节时,KP=18.824,i T =1,d T =0.25。
通过Simulink 进行如下图所示的仿真:仿真结果如下图所示:二、基于BP算法的PID控制基于BP神经网络的PID控制系统结构如下图所示,控制器由两个部分组成:①经典的PID控制器:直接对被控对象进行闭环控制,并且KP,KI,KD三个参数为在线P,I,D整定;②神经网络NN:根据系统的运行状态,调节PID控制器的参数,以期达到某种性能指标的最优化。
即使神经网络的输出层神经元的输出状态对应于PID控制器的三个可调参数KP,KI,KD,通过神经网络的自学习、调整权系数,从而使其稳定P,I,D状态对应于某种最优控制规律下的PID控制器参数。
在这里设计的BP网络采用结构简单的三层BP神经网络,其结构如下图所示,有m个输入节点、Q个隐含层节点、3个输出节点。
输入节点对应所选的系统运行状态量,如系统不同时刻的输入量和输出量等,必要时要进行归一化K K K。

毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。

神经网络控制系统的设计与实现随着机器学习和人工智能技术的快速发展,神经网络控制系统越来越受到关注。
神经网络控制系统是一种通过人工神经网络来解决复杂控制问题的方法。
本文将介绍神经网络控制系统的设计和实现。
一、神经网络控制系统的基本原理神经网络控制系统主要由输入层、隐藏层和输出层组成。
输入层接受传感器采集的数据,并把数据传递到隐藏层。
隐藏层通过对输入层数据的处理,提取出数据的重要特征,并将处理结果传递到输出层。
输出层输出神经网络对控制系统的控制指令,并送往执行器。
在整个过程中,神经网络通过不断的学习和调整权重,提高模型的准确性和性能。
二、神经网络控制系统的设计1.数据采集和处理神经网络控制系统的设计首先要考虑的是数据采集和处理。
在控制系统中,传感器采集的数据是神经网络学习和决策的重要数据源。
为了保证数据准确性和稳定性,我们需要使用高质量的传感器,并对采集的数据进行处理和滤波,以去除控制不必要的干扰和噪声。
2.神经网络模型选择和训练神经网络模型的选择和训练是神经网络控制系统设计的重要部分。
在选择神经网络模型时,我们需要根据控制系统的特点和控制要求,选择合适的神经网络模型。
常用的神经网络模型包括BP神经网络、RBF神经网络、Hopfield神经网络等。
在训练神经网络模型时,我们需要使用大量的训练数据,并采用合适的学习算法对神经网络模型进行训练和调整。
3.控制器设计和实现神经网络的输出结果是控制器的输入,而控制器的输出是控制指令。
因此,控制器的设计和实现是神经网络控制系统设计的关键。
在控制器设计时,我们需要考虑控制系统的特性和控制要求,选择合适的控制算法,并采用合适的编程语言和平台实现控制器。
三、神经网络控制系统的应用神经网络控制系统在各种控制领域都有广泛应用。
例如,在制造业中,神经网络控制系统可以用于生产线的自动化控制和质量控制;在交通运输领域,神经网络控制系统可以用于智能交通管理和车辆导航;在环境保护领域,神经网络控制系统可以用于污染源的监测和管理。

摘要目前,由于PID结构简单,可通过调节比例积分和微分取得基本满意的控制性能,广泛应用在电厂的各种控制过程中。
电厂主汽温被控对象是一个大惯性、大迟延、非线性且对象变化的系统,常规汽温控制系统为串级PID控制或导前微分控制,当机组稳定运行时,一般能将主汽温控制在允许的范围内。
但当运行工况发生较大变化时,却很难保证控制品质。
因此本文研究基于BP神经网络的PID控制,利用神经网络的自学习、非线性和不依赖模型等特性实现PID参数的在线自整定,充分利用PID和神经网络的优点。
本处用一个多层前向神经网络,采用反向传播算法,依据控制要求实时输出Kp、Ki、Kd,依次作为PID控制器的实时参数,代替传统PID参数靠经验的人工整定和工程整定,以达到对大迟延主气温系统的良好控制。
对这样一个系统在MATLAB 平台上进行仿真研究,仿真结果表明基于BP神经网络的自整定PID控制具有良好的自适应能力和自学习能力,对大迟延和变对象的系统可取得良好的控制效果。
关键词:主汽温,PID,BP神经网络,MATLAB仿真ABSTRACTAt present, because PID has a simple structure and can be adjusted proportional 、integral and differential to satisfactory control performance, it is widely used in power plants of various control process. The system of power plant main steam temperature is an large inertia、big time-delayed and nonlinear dynamic system. Conventional steam temperature control system adopted cascade PID control or the differential control of lead before. When the unit is stable, these methods will control the steam temperature in a certain range ,but when operating conditions changed greatly, it is difficult to ensure the quality of control. This article studies PID control based BP neural network . Using such characteristics of neural network self-learning, nonlinear and don't rely on model realize PID parameters auto-tuning. It can make full use of the advantages of PID and neural network. Here, we use a multilayer feedforward neural network using back propagation algorithm. This net can real-time output Kp, Ki, Kd as the PID controller parameters , insteading of the traditional PID parameters determined by experience, so it can obtain good control performance .For such a system ,we can simulate in MATLAB simulation platform. The simulation results show that the PID control based BP neural network has good adaptive ability and self-learning ability. For the system of large delay and free-model can obtain good control effect.KEY WORDS: main steam temperature ,PID ,BP neural network,MATLAB simulation目录摘要.................................................................... I ABSTRACT................................................................... II 第一章绪论.. (1)1.1 选题背景和意义 (1)1.2 国内外研究现状 (1)1.3 立论依据 (5)1.4 本文所做的主要工作 (6)第二章神经网络的基本原理 (8)2.1 人工神经元模型 (8)2.2 神经网络的学习方式和学习规则 (9)2.2.1 神经网络的学习方式 (9)2.2.2 神经网络的学习规则 (9)2.3 神经网络的特点及应用 (10)2.4 BP神经网络 (11)2.4.1 BP神经网络的结构 (11)2.4.2 BP神经网络的算法 (12)2.5 本章小结 (16)第三章基于BP神经网络的PID控制 (17)3.1 PID控制器的离散差分方程 (17)3.2 基于BP神经网络的PID整定原理 (18)3.3 基于BP神经网络的PID控制算法流程 (22)3.4 本章小结 (22)第四章基于BP神经网络的PID控制在主汽温控制系统中的应用 (23)4.1 主汽温的控制任务 (23)4.2 主汽温被控对象的动态特性 (23)4.3 主汽温控制策略 (24)4.3.1 主汽温控制信号的选择 (24)4.3.2 主汽温控制的两种策略 (26)4.4仿真分析 (27)4.5 本章总结 (34)结论与展望 (35)参考文献 (37)致谢 (39)第一章绪论1.1 选题背景和意义在控制系统设计中,最主要而又最困难的问题是如何针对复杂、变化及具有不确定性的受控对象和环境作出有效的控制决策。

基于神经网络的预测控制模型仿真摘要:本文利用一种权值可以在线调整的动态BP神经网络对模型预测误差进行拟合并与预测模型一起构成动态组合预测器,在此基础上形成对模型误差具有动态补偿能力的预测控制算法。
该算法显著提高了预测精度,增强了预测控制算法的鲁棒性。
关键词:预测控制神经网络动态矩阵误差补偿1.引言动态矩阵控制(DMC)是一种适用于渐近稳定的线性或弱非线性对象的预测控制算法,目前已广泛应用于工业过程控制。
它基于对象阶跃响应系数建立预测模型,因此建模简单,同时采用多步滚动优化与反馈校正相结合,能直接处理大时滞对象,并具有良好的跟踪性能和较强的鲁棒性。
但是,DMC算法在实际控制中存在一系列问题,模型失配是其中普遍存在的一个问题,并会不同程度地影响系统性能。
DMC在实际控制中产生模型失配的原因主要有2个,一是诸如建模误差、环境干扰等因素,它会在实际控制的全程范围内引起DMC的模型失配;二是实际系统的非线性特性,这一特性使得被控对象的模型发生变化,此时若用一组固定的阶跃响应数据设计控制器进行全程范围的控制,必然会使实际控制在对象的非建模区段内出现模型失配。
针对DMC模型失配问题,已有学者进行了大量的研究,并取得了丰富的研究成果,其中有基于DMC控制参数在线辨识的智能控制算法,基于模型在线辨识的自校正控制算法以及用神经元网络进行模型辨识、在辨识的基础上再进行动态矩阵控制等。
这些算法尽管进行在线辨识修正对象模型参数,仍对对象降阶建模误差(结构性建模误差)的鲁棒性不好,并对随机噪声干扰较敏感。
针对以上问题,出现了基于误差校正的动态矩阵控制算法。
这些文献用基于时间序列预测的数学模型误差代替原模型误差,得到对未来误差的预测。
有人还将这种误差预测方法引入动态矩阵控制,并应用于实际。
这种方法虽然使系统表现出良好的稳定性,但建立精确的误差数学模型还存在一定的困难。
本文利用神经网络通过训练学习能逼近任意连续有界函数的特点,建立了一种采用BP 神经网络进行预测误差补偿的DMC预测控制模型。
基于神经网络的自适应控制系统设计与仿真随着科技的发展,控制系统在日常生活中得到了广泛的应用,例如:家庭智能化控制系统、工业自动化控制系统等。
而神经网络作为一种类似于人脑的计算机模型,已经被广泛应用于控制系统中。
本文将以神经网络为基础,探讨如何设计与仿真基于神经网络的自适应控制系统。
一、神经网络的控制原理神经网络由多个神经元构成的网络,可以实现复杂的非线性系统的建模和控制。
在神经网络中,输入信号经过加权处理后,会传递到隐藏层,最终输出到输出层。
神经网络可以基于所学习到的知识对输入数据进行处理,并输出对应的数据。
神经网络在控制系统中的核心原理,就是利用其学习和记忆的能力,对于系统中的复杂非线性关系进行学习和模拟。
神经网络可以不断根据系统的反馈信息进行调整,从而逐渐达到一个稳态的控制。
二、基于神经网络的自适应控制系统设计在设计基于神经网络的自适应控制系统时,主要分为以下几个步骤:1. 确定系统模型首先需要确定系统的模型,即输入与输出的变量关系及其参数。
如果系统的模型较为简单,可以手动推导得到;如果系统较为复杂,则需要通过实验来获得系统的参数。
获得系统的模型后,可以用神经网络来模拟系统的非线性特性,以实现系统控制。
2. 神经网络选型在确定系统模型后,需要选择适合的神经网络。
常用的神经网络结构有BP神经网络、RBF神经网络、Hopfield神经网络等。
不同的模型和应用场景需要选择不同的神经网络来实现。
3. 神经网络训练对选定的神经网络进行训练,使其能够准确地模拟系统的行为。
训练可以采用梯度下降算法、反向传播算法等方法,通过迭代调整网络的权值和阈值向目标函数收敛的过程,得到满足要求的控制模型。
4. 控制器的设计和实现根据所选的神经网络模型和训练结果,设计出控制器,并对其进行实现。
在实现控制器时,需要考虑电路元器件的匹配和输出电信号的传输延迟等因素,以保证控制的稳定性和精度。
三、基于神经网络的自适应控制系统仿真完成基于神经网络的自适应控制系统设计后,需要进行仿真测试。

第一章前言1.1 课题的意义:本毕业设计旨在学习并比较各种自适应控制算法,掌握matlab语言,利用simulink对自适应控制系统模型进行仿真分析。
自适应控制是人们要求越来越高的控制性能和针对被控系统的高度复杂化,高度不确定性的情况下产生的,是人工智能渗入到应用科技领域的必然结果。
并在常规控制理论的基础上得到进一步的发展和提高。
进入21世纪以来,智能控制技术和远程监测技术继续飞速发展,逐渐被应用到电力、交通和物流等领域。
从卫星智能控制,到智能家居机器人;从公共场所的无线报警系统,到家用煤气、自来水等数据的采集。
可以说,智能控制技术和远程监测技术己经渗透到了人们日常生活之中,节约了大量的人力和物力,给人们的日常生活带来了极大的便利。
目前,自适应控制的研究以认知科学、心理学、社会学、系统学、语言学和哲学为基础,有效的把数字技术、远程通信、计算机网络、数据库、计算机图形学、语音与听觉、机器人学、过程控制等技术有机的结合,提供了解决复杂问题的有效手段。
自适应控制是在人们在追求高控制性能、高度复杂化和高度不确定性的被控系统情况下产生的,是人工智能渗入到应用科技领域的必然结果,并在常规控制理论的基础上得到进一步的发展和提高。
主要研究对象从单输入、单输出的常系数线性系统,发展为多输入、多输出的复杂控制系统。
自适应控制理论的产生为解决复杂系统控制问题开辟了新的途径,成为当下控制领域的研究和发展热点。
1.2 国内外研究概况及发展趋势:1943年,心理学家W·Mcculloch和数理逻辑学家W·Pitts在分析、总结神经元基本特性的基础上首先提出神经元的数学模型。
此模型沿用至今,并且直接影响着这一领域研究的进展。
因而,他们两人可称为人工神经网络研究的先驱。
1945年冯·诺依曼领导的设计小组试制成功存储程序式电子计算机,标志着电子计算机时代的开始。
1948年,他在研究工作中比较了人脑结构与存储程序式计算机的根本区别,提出了以简单神经元构成的再生自动机网络结构。

摘要虚拟设计是近年来发展起来的一个新的研究领域,智能控制虚拟实验室则是智能控制教学上的一个很好的工具。
鉴于传统实验室需要的设备,资金,场地等问题,利用虚拟实验室进行实验教学能够很大程度上的节约成本,同时用户在计算机前就能完成实验,查看实验结果,也能提高效率,节省时间。
本课题主要是建立可以进行智能控制虚拟实验,其模拟的是天煌教仪生产的“THJ-2型高级过程控制系统实验装置”。
本设计由三个主要部分构成:虚拟实验室的3D造型、智能控制实验仿真、图形用户界面(GUI)。
在具体的实现过程中,利用VRML语言完成虚拟实验室3D模型的建立;通过MATLAB的强大数据处理功能实现了BP神经网络控制实验的仿真和GUI的设计;最后利用MATLAB对系统进行封装,形成独立的可执行程序。
用户可通过封装程序界面打开GUI界面,在GUI界面中进行实验,设置参数,并能够察看系统的仿真曲线,实现虚拟实验的效果。
关键字:虚拟实验室、VRML、BP神经网络、MATLABAbstractVirtual design is developed in new area of research in recent years, Virtual Intelligent Control Laboratory is a good teaching tool of Intelligent Control Education. In view of the need for traditional laboratory equipment, funds, space and other issues, using virtual laboratory for experimental teaching in a large extent the cost savings, while people will be able to be completed the experiment to see results, but also improve efficiency, save time by using computer.The main issue is the establishment of a virtual intelligent control can be simulated laboratory equipment is “THJ-2 advanced process control system experimental” made by Tianhuang company .The design is consists of three main parts: the 3D Virtual Laboratory modeling, the simulation of intelligent control, the graphical user interfaces (GUI).The realization of the specific process, by using of VRML language to complete the virtual 3D model laboratory; through MATLAB's powerful data-processing functions to do a BP neural network control experiment simulation and make GUI design; the final, using MATLAB to let the system package to form an independent executable program. Users can open the GUI interface package interface, the GUI interface in the experiment, set parameters, and be able to see the simulation curve, the effect of virtual experiments.Keywords: Virtual Laboratory, VRML, BP neural network controller, MATLAB目录第1章引言 (1)1.1课题的研究背景及研究目地 (1)1.2虚拟实验室的介绍 (3)1.2.1 虚拟实验室的概念 (3)1.2.2 虚拟设计的技术基础 (3)1.2.3 虚拟设计的特点 (4)1.2.4虚拟设计的优点 (5)1.3课题研究的主要内容 (5)第2章VRML虚拟实验设备设计 (7)2.1 VRML技术基础知识 (7)2.1.1 VRML技术概述 (8)2.1.2 VRML文件组成 (8)2.1.3 VRML节点简介 (8)2.2实验装备简介 (11)2.3虚拟实验室的设计 (11)2.3.1 部分元件设计及程序. (11)2.3.2 由零件组成控制面板的小单元 (14)2.3.3 各控制单元组成完整的控制面板 (16)第3章神经网络理论 (17)3.1神经网络理论概述 (17)3.2 BP神经网络 (18)第4章基于MATLAB的BP神经网络控制器的设计及其实验仿真 (20)4.1基于BP神经网络控制器的设计 (20)4.2 BP-PID控制实验仿真 (23)4.2.1 MATLAB 简介. (23)4.2.2 BP-PID控制实验仿真 (24)4.3图形用户界面(GUI)的设计 (32)4.3.1MATLAB图形用户界面简介. (32)4.3.2图形用户界面实现的功能 (34)4.3.3图形用户界面的实现过程 (34)4.4系统封装 (37)4.4.1 封装目地. (37)4.4.2 MATLAB封装具体过程 (38)第5章结论 (39)参考文献 (40)致谢 (41)附录一VRML设计部分程序 (42)附录二MATLAB设计GUI程序 (46)第一章引言近些年来,迅速发展的计算机硬件技术与不断改进的计算机软件系统相匹配,使得基于大型数据集合的声音和图像的实时动画制作成为可能;人机交互系统的设计不断创新,新颖、实用的输入输出设备不断地进入市场。

神经网络(一)实验原理1、单神经元单个人工神经元的模型结构如图所示,它是一个多输入、单输出的非线性信息处理单元。
图1神经元的基本结构其中,),,2,1(nix i=:从其他神经元传来的输入信号;w i:从其他神经元到该神经元的连接权值;θi:神经元的激活(兴奋)阈值;y:神经元i的输出,它可以与其他多个神经元通过权连接;f(·):神经元的输出变换函数,一般为非线性画数,也称为激励函数或响应函数。
显然,单神经元模型是一个多输入单输出的非线性阈值器件,其输入、输出数学表达式可用下式描述;)(Xfy=∑=-=ni i i x wX1θ由此可看出,神经网络的数学模型的基本运算可归结为以下四步;(1)权值学习:对每个输入信号进行程度不等的加权计算;(2)阈值处理:对每个神经元输入进行程度不等的偏置处理;(3)求和运算:进行全部输入信号的组合效果的求和计算;(4)映射函数:通过激励函数)(∙f计算输出结果。
2、单神经元的PID控制器设计神经元作为构成神经网络的基本单元,具有自学习和自适应的能力,而且结构简单易于计算。
传统的PID调节器也具有结构简单、调整方便和参数整定与工程指标联系密切等特点。
将两者结合,便可以在一定程度上解决传统PID调节器不易在线实时整定参数和难于对一些复杂过程和参数慢时变系统进行有效控制的不足。
用神经元实现的自适应PID 控制器结构框图如图所示。
图2基于单个神经元的PID 控制器框图图中转换器的输入为设定值r(k)和输出y(k),转换器的输出为神经元学习所需要的状态量x 1,x 2,x 3。
K 为神经元的比例系数。
使用改进的Hebb 学习规则的控制算法及学习算法为:∑=+-=310)()(w )1()(u i i i k x k K k u k ∑==310)(/)()(i i ik wi k w k w )]()()[()()1()(w 11k e k e k u k e k w k P ∆++-=η)]()()[()()1()(w 22k e k e k u k e k w k I ∆++-=η)]()()[()()1()(w 33k e k e k u k e k w k D ∆++-=η式中)()(1k e k x =)1()()()(2--=∆=k e k e k e k x )2()1(2)()()(23-+--=∆=k e k e k e k e k x 对积分I 、比例P 和微分D 分别采用了不同的学习速率I η、P η、D η,以使对不同的权系数分别进行调整。
摘要目前,由于PID结构简单,可通过调节比例积分和微分取得基本满意的控制性能,广泛应用在电厂的各种控制过程中。
电厂主汽温被控对象是一个大惯性、大迟延、非线性且对象变化的系统,常规汽温控制系统为串级PID控制或导前微分控制,当机组稳定运行时,一般能将主汽温控制在允许的范围内。
但当运行工况发生较大变化时,却很难保证控制品质。
因此本文研究基于BP神经网络的PID控制,利用神经网络的自学习、非线性和不依赖模型等特性实现PID参数的在线自整定,充分利用PID和神经网络的优点。
本处用一个多层前向神经网络,采用反向传播算法,依据控制要求实时输出Kp、Ki、Kd,依次作为PID控制器的实时参数,代替传统PID参数靠经验的人工整定和工程整定,以达到对大迟延主气温系统的良好控制。
对这样一个系统在MATLAB 平台上进行仿真研究,仿真结果表明基于BP神经网络的自整定PID控制具有良好的自适应能力和自学习能力,对大迟延和变对象的系统可取得良好的控制效果。
关键词:主汽温,PID,BP神经网络,MATLAB仿真ABSTRACTAt present, because PID has a simple structure and can be adjusted proportional 、integral and differential to satisfactory control performance, it is widely used in power plants of various control process. The system of power plant main steam temperature is an large inertia、big time-delayed and nonlinear dynamic system. Conventional steam temperature control system adopted cascade PID control or the differential control of lead before. When the unit is stable, these methods will control the steam temperature in a certain range ,but when operating conditions changed greatly, it is difficult to ensure the quality of control. This article studies PID control based BP neural network . Using such characteristics of neural network self-learning, nonlinear and don't rely on model realize PID parameters auto-tuning. It can make full use of the advantages of PID and neural network. Here, we use a multilayer feedforward neural network using back propagation algorithm. This net can real-time output Kp, Ki, Kd as the PID controller parameters , insteading of the traditional PID parameters determined by experience, so it can obtain good control performance .For such a system ,we can simulate in MATLAB simulation platform. The simulation results show that the PID control based BP neural network has good adaptive ability and self-learning ability. For the system of large delay and free-model can obtain good control effect.KEY WORDS: main steam temperature ,PID ,BP neural network,MATLAB simulation目录摘要 (I)ABSTRACT (II)第一章绪论 (1)1.1 选题背景和意义 (1)1.2 国内外研究现状 (1)1.3 立论依据 (5)1.4 本文所做的主要工作 (6)第二章神经网络的基本原理 (8)2.1 人工神经元模型 (8)2.2 神经网络的学习方式和学习规则 (9)2.2.1 神经网络的学习方式 (9)2.2.2 神经网络的学习规则 (9)2.3 神经网络的特点及应用 (10)2.4 BP神经网络 (11)2.4.1 BP神经网络的结构 (11)2.4.2 BP神经网络的算法 (12)2.5 本章小结 (16)第三章基于BP神经网络的PID控制 (17)3.1 PID控制器的离散差分方程 (17)3.2 基于BP神经网络的PID整定原理 (18)3.3 基于BP神经网络的PID控制算法流程 (22)3.4 本章小结 (22)第四章基于BP神经网络的PID控制在主汽温控制系统中的应用 (23)4.1 主汽温的控制任务 (23)4.2 主汽温被控对象的动态特性 (23)4.3 主汽温控制策略 (24)4.3.1 主汽温控制信号的选择 (24)4.3.2 主汽温控制的两种策略 (26)4.4仿真分析 (27)4.5 本章总结 (34)结论与展望 (35)参考文献 (37)致谢 (39)第一章绪论1.1 选题背景和意义在控制系统设计中,最主要而又最困难的问题是如何针对复杂、变化及具有不确定性的受控对象和环境作出有效的控制决策。
经典控制理论和现代控制理论的基础是建立数学模型,以此进行控制系统设计,然而面对工程实际问题和工程应用对控制要求的不断提高,基于数学模型的控制理论和方法的局限性日益明显。
无模型控制能有效提高控制系统的适应性和鲁棒性,因此,走向无模型控制是自动控制发展的另一个重要方向。
在1943年,麦卡洛克和皮茨首次提出了脑模型,其最初动机在于模仿生物的神经系统。
随着超大规模集成电路(VLSl)、光电子学和计算机技术的发展,人工神经网络己引起更为广泛的注意。
近年来,基于神经元控制的理论和机理已获得进一步的开发和应用。
尽管基于神经元的控制能力还比较有限,但由于神经网络控制器具有学习能力和记忆能力、概括能力、并行处理能力、容错能力等重要特性,仍然有许多基于人工神经网络的控制器被设计出来,这类控制器具有并行处理、执行速度快、鲁棒性好、自适应性强和适于应用等优点,广泛的应用在控制领域[1]。
神经网络控制是一种基本上不依赖于模型的控制方法,它比较适用于那些具有不确定性或高度非线性的控制对象,并具有较强的适应和学习功能,它是智能控制的一个重要分支。
对于自动控制来说,神经网络有具有自适应功能,泛化功能,非线性映射功,高度并行处理功能等几方面优势[2],这使得神经网络成为当今一个非常热门的交叉学科, 广泛应用在电力,化工,机械等各行各业,并取得了比较好的控制效果。
1.2 国内外研究现状随着现代工业过程的日益复杂,经典现代控制理论面临严峻挑战,例如被控系统越来越巨大,存在多种不确定因素,存在难以确定描述的非线性特性,而控制的要求越来越高(如控制精度、稳定性、容错、实时性等),因此人们一直在探索如何使控制系统具有更高的智能,使之能够适应各种控制环境。
而神经网络源于对人脑神经功能的模拟,它的某些类似人的智能特性有可能被用于解决现代控制面临的一些难题。
因此,从20世纪60年代起,人们就开始研究神经网络在控制中的应用了,取得了一定效果。
目前,随着神经理论的发展和新算法的相继提出,神经网络的应用越来越广泛。
从神经网络的基本模式看,主要有:前馈型、反馈型、自组织型及随机型神经网络[3]。
这四种类型各自具有不同的网络模型:前馈网络中主要有BP网络及RBF网络;反馈网络主要有Hopfield网络;自组织网络主要有ART网。
当前,已经比较成熟的神经网络控制模型主要有神经自校正控制,神经PID控制,神经模型参考自适应控制,神经内膜控制等等[4](1) 、神经网络自校正控制神经自校正控制结构如图,它由两个回路组成:(1)自校正控制器与被控对象构成的反馈回路;(2)神经网络辨识器与控制器设计,以得到控制器的参数。
这种方案的设计思想是利用神经网络辨识器的计算估计能力对常规控制器参数进行约束优化求解,从而实现对常规控制器的参数或结构进行调整。
方框图如下[5]:图1-1 神经自校正控制结构图可见,辨识器与自校正控制器的在线设计是自校正控制实现的关键。
(2)、神经网络PID控制。
PID控制要取得好的控制效果,就必须通过调整好比例、积分和微分三种控制作用在形成控制量中相互配合又相互制约的关系,这种关系不一定是简单的“线性组合”,从变化无穷的非线性组合中可以找出最佳的关系。
神经网络所具有的任意非线性表示能力,可以通过对系统性能的学习来实现具有最佳组合的PID控制。
方框图如下[6]:图1-2 神经PID控制结构图对于一般神经PID常采用BP算法,因BP神经网络具有逼近任意非线性函数的能力,而且结构和学习算法简单明确。
通过神经网络的自身学习、加权系数调整,从而使其稳定状态对应于某种最优控制律下的PID控制器参数。
(3) 、神经网络模型参考自适应控制神经网络模型参考自适应控制 ,将神经网络同模型参考自适应控制相结合,就构成了神经网络模型参考自适应控制,其系统的结构形式和线性系统的模型参考自适应控制系统是相同的,只是通过神经网络给出被控对象的辨识模型。
根据结构的不同可分为直接与间接神经网络模型参考自适应控制两种类型,分别如图中(a)和(b)所示。
间接方式比直接方式中多采用一个神经网络辨识器,其余部分完全相同[7]。
(a)e(b)图1-3 神经模型参考自适应控制结构图 神经控制器的权重修正目标是使过程输出最后以零误差跟踪参数模型输出。
对于直接方式,由于未知的非线性对象处于误差和神经控制器的中间位置,给参数修正造成困难。
为了避免这一问题,增加神经辨识器,变为间接方式。