船舶操纵13
- 格式:ppt
- 大小:255.00 KB
- 文档页数:35
船舶操纵知识点船舶作为一种重要的交通工具,被广泛应用于海洋、河流等水域。
而在操纵船舶的过程中,船长和船员需要掌握一定的船舶操纵知识点,以确保船舶的安全运行。
本文将针对船舶操纵所需要了解的一些知识点进行探讨。
1. 舵角和操舵方式舵角是指船舶船轮转动的角度,通过舵角的调整,船长可以控制船的航向。
船舶可以通过手动操纵舵轮或使用自动操纵装置来调整舵角。
手动操纵舵轮通常需要两名船员协调,其中一名船员负责转动舵轮,另一名船员负责监督舵角的变化。
自动操纵装置则可以根据预设的航线和参数自动调整舵角,减轻船员的工作负担。
2. 舵手须知舵手是操纵船舶的重要角色之一。
舵手需要具备以下技能和知识点:a. 熟练掌握船舶结构和舵机操纵原理。
b. 熟悉船舶航行规则和航行标志。
c. 熟悉船舶吃水和排水情况,以及与潮汐等相关的水文地理知识。
d. 熟悉船舶不同航速状态下的不同舵角调整方式和技巧。
e. 熟悉船舶遇到紧急情况时的应急处置方式。
3. 转向和掉头船舶在航行中需要进行转向和掉头操作,以避免遇到障碍物或改变船的航向。
在进行转向和掉头时,船长需要考虑以下几点:a. 船舶的航速和航向。
b. 船舶的吃水和排水情况。
c. 船舶当前的舵角和转向方式。
转向方式分为渐变转向和急转弯两种。
渐变转向可以分为外侧弯和内侧弯,分别对应着船舶正常航行时左转和右转的状态。
急转弯则是在一定时间内使船舶快速改变航向。
4. 驾驶技巧和注意点a. 航行时需随时留意船舶周围环境,注意观察水流、风速、潮汐等因素的变化。
b. 船舶在不同航速状态下的操作方式和技巧不同,需注意切换。
c. 若发生船舶故障或天气突变等紧急情况,需及时采取应急处置措施。
d. 舵轮操作时需小心谨慎,避免过度调整舵角引发不必要的风险。
e. 在船舶停泊和起锚时,需注意船舶与岸边或其他船只的距离和方向,操作时需谨慎。
总结船舶操纵技巧和知识点涉及诸多方面,通过不断学习和实践,船长和船员可以掌握有效的操作技巧,确保船舶的安全运行。

船舶操纵技巧与技术船舶操纵是航行中至关重要的一环,良好的操纵技巧和技术能够确保船只在复杂的水域中安全运行。
本文将介绍一些船舶操纵的技巧和技术,帮助船员更好地应对各种操纵挑战。
一、船舶操纵的基本原则船舶操纵的基本原则涉及到船舶动力学、水动力学和操纵设备的运用。
在实际操纵中,应遵循以下原则:1. 保持船舶稳定:船舶操纵过程中应尽量减小船舶的摇摆和倾斜,保持船舶的稳定性。
2. 控制速度和方向:及时、准确地通过手动或自动操纵设备调整船舶的速度和方向。
3. 避免碰撞和搁浅:注意监测船舶周围的水域情况,避免与其他船只、岛屿或障碍物碰撞,并确保船舶不会搁浅。
4. 灵活应对突发情况:当遇到突发情况,如恶劣天气、机械故障或其他紧急情况时,及时采取应对措施,确保船舶安全。
二、船舶操纵技巧1. 舵角和推力的协调运用:正确配合舵角和推力,通过调整舵柄和控制推进器来控制船舶的方向和速度。
2. 转向技巧:在进行转向操作时,应在中速航行状态下开始转向,逐渐增加船舶舵角,使船舶缓慢转向。
转向角度过大或过快都会引起摇摆或失控。
另外,进入弯道时应提前减速,以确保船舶在转弯过程中不会失控。
3. 使用舵动力特性:船舶舵的响应时间较长,因此在操纵船舶时,应提前预判和计划舵的动作,避免误操作。
同时,应注意保持适量的速度,以利用水流在船舶舵上的力量来帮助控制船舶运动。
4. 使用辅助设备:船舶操纵过程中,可以借助雷达、GPS、罗经等辅助设备来提供实时航行信息,帮助船员更好地掌握船舶位置、航向、速度等关键数据,从而进行准确的操纵。
三、船舶操纵技术1. 自动操纵技术:随着技术的进步,现代船舶配备了自动操纵系统,如自动驾驶系统、动力位置系统等,通过这些系统可以实现自动控制船舶的方向、速度和位置。
船员可根据实际情况灵活使用这些技术来提高船舶操纵的效率和安全性。
2. 航线规划和动态控制:在船舶操纵中,可以利用电子海图和航线规划系统来预先规划船舶的航线,并在航行中动态调整航线以应对不同的情况。
4.4 船舶操纵控制船舶操纵是指船舶驾驶员根据船舶操纵性能和风、浪、流等客观条件,按照有关法规要求,正确运用操纵设备,使船舶按照驾驶员的意图保持或改变船舶水平运动状态的操作。
下面介绍现代船舶航向控制和船舶主机遥控操纵。
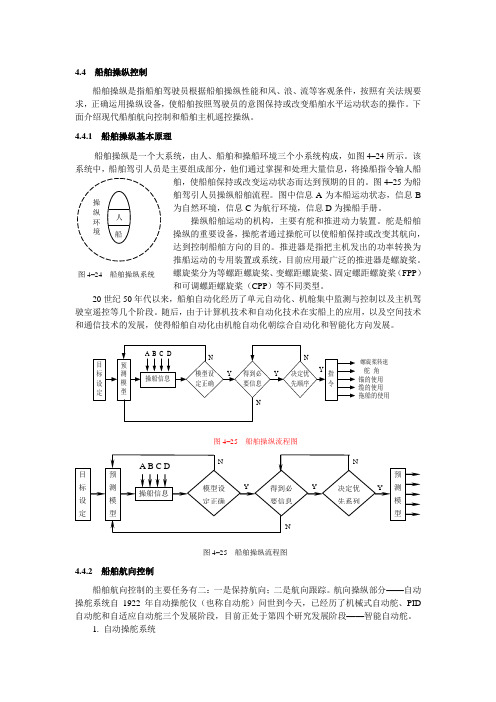
4.4.1 船舶操纵基本原理船舶操纵是一个大系统,由人、船舶和操船环境三个小系统构成,如图4–24所示。
该系统中,船舶驾引人员是主要组成部分,他们通过掌握和处理大量信息,将操船指令输人船舶,使船舶保持或改变运动状态而达到预期的目的。
图4–25为船舶驾引人员操纵船舶流程。
图中信息A 为本船运动状态,信息B为自然环境,信息C 为航行环境,信息D 为操船手册。
操纵船舶运动的机构,主要有舵和推进动力装置。
舵是船舶操纵的重要设备,操舵者通过操舵可以使船舶保持或改变其航向,达到控制船舶方向的目的。
推进器是指把主机发出的功率转换为推船运动的专用装置或系统,目前应用最广泛的推进器是螺旋桨。
螺旋桨分为等螺距螺旋桨、变螺距螺旋桨、固定螺距螺旋桨(FPP )和可调螺距螺旋桨(CPP )等不同类型。
20世纪50年代以来,船舶自动化经历了单元自动化、机舱集中监测与控制以及主机驾驶室遥控等几个阶段。
随后,由于计算机技术和自动化技术在实船上的应用,以及空间技术和通信技术的发展,使得船舶自动化由机舱自动化朝综合自动化和智能化方向发展。
螺旋桨转速舵 角锚的使用缆的使用拖船的使用图4–25 船舶操纵流程图4.4.2 船舶航向控制船舶航向控制的主要任务有二:一是保持航向;二是航向跟踪。
航向操纵部分——自动操舵系统自1922年自动操舵仪(也称自动舵)问世到今天,已经历了机械式自动舵、PID 自动舵和自适应自动舵三个发展阶段,目前正处于第四个研究发展阶段——智能自动舵。
1. 自动操舵系统1) 常规PID 自动舵在航海自动化系统中,船舶是系统的调节对象,若略去动力装置的影响,船舶运动状态的调节,将由舵来实现,并从船首方向表现出来。
4.4 船舶操纵控制船舶操纵是指船舶驾驶员根据船舶操纵性能和风、浪、流等客观条件,按照有关法规要求,正确运用操纵设备,使船舶按照驾驶员的意图保持或改变船舶水平运动状态的操作。
下面介绍现代船舶航向控制和船舶主机遥控操纵。
4.4.1 船舶操纵基本原理船舶操纵是一个大系统,由人、船舶和操船环境三个小系统构成,如图4–24所示。
该系统中,船舶驾引人员是主要组成部分,他们通过掌握和处理大量信息,将操船指令输人船舶,使船舶保持或改变运动状态而达到预期的目的。
图4–25为船舶驾引人员操纵船舶流程。
图中信息A 为本船运动状态,信息B为自然环境,信息C 为航行环境,信息D 为操船手册。
操纵船舶运动的机构,主要有舵和推进动力装置。
舵是船舶操纵的重要设备,操舵者通过操舵可以使船舶保持或改变其航向,达到控制船舶方向的目的。
推进器是指把主机发出的功率转换为推船运动的专用装置或系统,目前应用最广泛的推进器是螺旋桨。
螺旋桨分为等螺距螺旋桨、变螺距螺旋桨、固定螺距螺旋桨(FPP )和可调螺距螺旋桨(CPP )等不同类型。
20世纪50年代以来,船舶自动化经历了单元自动化、机舱集中监测与控制以及主机驾驶室遥控等几个阶段。
随后,由于计算机技术和自动化技术在实船上的应用,以及空间技术和通信技术的发展,使得船舶自动化由机舱自动化朝综合自动化和智能化方向发展。
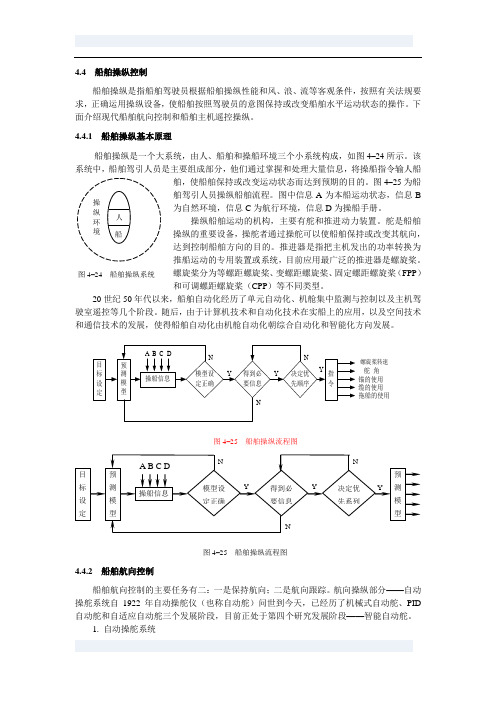
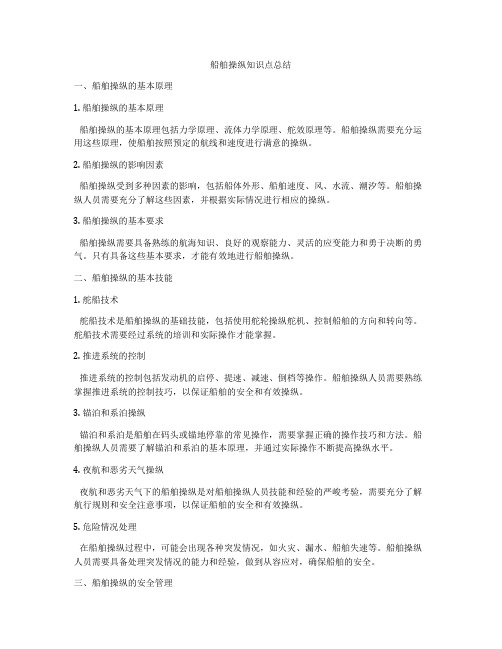
目标设定预测模型操船信息模型设定正确得到必要信息决定优先顺序指令N N Y Y Y N 螺旋桨转速舵 角锚的使用缆的使用拖船的使用A B C D图4–25 船舶操纵流程图4.4.2 船舶航向控制船舶航向控制的主要任务有二:一是保持航向;二是航向跟踪。
航向操纵部分——自动操舵系统自1922年自动操舵仪(也称自动舵)问世到今天,已经历了机械式自动舵、PID 自动舵和自适应自动舵三个发展阶段,目前正处于第四个研究发展阶段——智能自动舵。
1. 自动操舵系统人 船操纵环境 图4–24 船舶操纵系统 图4–25 船舶操纵流程图 A B C D N NN Y Y Y 目标设定 预 测 模 型 操船信息 模型设定正确 得到必要信息决定优先系列 预 测 模 型1) 常规PID 自动舵在航海自动化系统中,船舶是系统的调节对象,若略去动力装置的影响,船舶运动状态的调节,将由舵来实现,并从船首方向表现出来。
4.4 船舶操纵控制船舶操纵是指船舶驾驶员根据船舶操纵性能和风、浪、流等客观条件,按照有关法规要求,正确运用操纵设备,使船舶按照驾驶员的意图保持或改变船舶水平运动状态的操作。
下面介绍现代船舶航向控制和船舶主机遥控操纵。
4.4.1 船舶操纵基本原理船舶操纵是一个大系统,由人、船舶和操船环境三个小系统构成,如图4–24所示。
该系统中,船舶驾引人员是主要组成部分,他们通过掌握和处理大量信息,将操船指令输人船舶,使船舶保持或改变运动状态而达到预期的目的。
图4–25为船舶驾引人员操纵船舶流程。
图中信息A 为本船运动状态,信息B为自然环境,信息C 为航行环境,信息D 为操船手册。
操纵船舶运动的机构,主要有舵和推进动力装置。
舵是船舶操纵的重要设备,操舵者通过操舵可以使船舶保持或改变其航向,达到控制船舶方向的目的。
推进器是指把主机发出的功率转换为推船运动的专用装置或系统,目前应用最广泛的推进器是螺旋桨。
螺旋桨分为等螺距螺旋桨、变螺距螺旋桨、固定螺距螺旋桨(FPP )和可调螺距螺旋桨(CPP )等不同类型。
20世纪50年代以来,船舶自动化经历了单元自动化、机舱集中监测与控制以及主机驾驶室遥控等几个阶段。
随后,由于计算机技术和自动化技术在实船上的应用,以及空间技术和通信技术的发展,使得船舶自动化由机舱自动化朝综合自动化和智能化方向发展。
目标设定预测模型操船信息模型设定正确得到必要信息决定优先顺序指令N N Y Y Y N 螺旋桨转速舵 角锚的使用缆的使用拖船的使用A B C D图4–25 船舶操纵流程图4.4.2 船舶航向控制船舶航向控制的主要任务有二:一是保持航向;二是航向跟踪。
航向操纵部分——自动操舵系统自1922年自动操舵仪(也称自动舵)问世到今天,已经历了机械式自动舵、PID 自动舵和自适应自动舵三个发展阶段,目前正处于第四个研究发展阶段——智能自动舵。
1. 自动操舵系统人 船操纵环境 图4–24 船舶操纵系统 图4–25 船舶操纵流程图 A B C D N NN Y Y Y 目标设定 预 测 模 型 操船信息 模型设定正确 得到必要信息决定优先系列 预 测 模 型1) 常规PID 自动舵在航海自动化系统中,船舶是系统的调节对象,若略去动力装置的影响,船舶运动状态的调节,将由舵来实现,并从船首方向表现出来。

第 1 页 共 3 页《船舶操纵》复习题一、选择题1、船舶旋回圈中的进距是指( )。
A .自操舵起,至航向改变90°时,其重心在原航向上的横向移动距离B .自操舵起,至航向改变90°时,其重心在原航向上的纵向移动距离C .自操舵起,至航向改变180°时,其重心在原航向上的横向移动距离D .自操舵起,至航向改变180°时,其重心在原航向上的纵向移动距离 2、船舶旋回过程中的反移量是指( )。
A .自操舵起,其重心向转舵相反一侧在原航向上的横向移动距离B .自操舵起,其船尾向转舵相反一侧在原航向上的横向移动距离C .自操舵起,其重心向转舵一侧在原航向上的横向移动距离D .自操舵起,其船尾向转舵一侧在原航向上的横向移动距离3、船舶旋回中,会出现减速现象,这是因为:Ⅰ、船体斜航时,阻力增加 Ⅱ、舵阻力增加 Ⅲ、推进器效率降低 ( )。
A. ⅠB. Ⅰ、ⅡC. Ⅱ、ⅢD. Ⅰ、Ⅱ、Ⅲ 4、船舶在狭窄水道航行,对转向后能否保持在计划航线起决定性的因素是( )?A. 新航向距离B. 最大横距C. 倒车停船冲程D. 旋回初径5、船舶做旋回运动时,下列正确的是:( )Ⅰ、漂角增大,旋回降速加剧;Ⅱ、漂角增大,转心前移;Ⅲ、漂角增大,旋回半径增大;Ⅳ、定常旋回时漂角越大,稳定横倾越大 A. Ⅰ、Ⅱ B. Ⅰ、Ⅲ C. Ⅰ、Ⅱ、Ⅲ D. Ⅰ、Ⅱ、Ⅳ6、船舶旋回运动中,在转心处的( )。
A .漂角为最大,横移速度为最大B .漂角为零,横移速度为零C .漂角为最大,横移速度为零D .漂角为零,横移速度为最大 7、船舶作舵旋回运动时,最大横倾角出现在( )。
A .内侧横倾期间B .外侧横倾期间C .内侧横倾期向外侧横倾期过渡时D .速降最大时8、船舶操舵旋回中,在转舵阶段将向——横倾,在定常旋回阶段将向——横倾( )。
A .转舵一侧/转舵相反一侧B .转舵一侧/转舵一侧C .转舵相反一侧/转舵一侧D .转舵相反一侧/转舵相反一侧 9、船舶航向稳定性是指( )A. 直线运动稳定性;B. 方向稳定性;C. 直线运动稳定性和位置稳定性;D. 方向稳定性和位置稳定性;10、航向稳定性好的船舶:Ⅰ、直进航行中即使很少操舵也能较好地保向 Ⅱ、操舵改向时,能较快地应舵 Ⅲ、旋回中正舵,能较快地使航向稳定下来 Ⅳ、船速较高( )A. Ⅰ、Ⅱ、Ⅲ、ⅣB. Ⅰ、Ⅱ、ⅢC. Ⅰ、ⅡD. Ⅰ 11、尾倾船的特点是:( )A. 航向稳定性差,旋回圈大B. 航向稳定性差,旋回圈小C. 航向稳定性好,旋回圈大D. 航向稳定性好,旋回圈小 12、船舶航向稳定性与其长宽比L /B 和方型系数有关:( )A. 长宽比L /B 越大、方型系数越大,航向稳定性越好;B. 长宽比L /B 越小、方型系数越小,航向稳定性越好;C. 长宽比L /B 越大、方型系数越小,航向稳定性越好;D. 长宽比L /B 越小、方型系数越大,航向稳定性越好。


船舶操纵安全操作规程船舶操纵是指船舶在水上的行进过程中,通过控制舵盘和推进装置,实现方向和速度的调节。
船舶操纵的安全操作规程是为了确保船舶操纵过程中的安全性和顺利性而制定的一系列标准和要求。
本文将介绍船舶操纵安全操作规程的相关内容。
首先,船舶操纵的安全操作规程要求船舶操纵人员必须具备相关的资质和技能。
船舶操纵人员应经过专门的培训和考核,获得相应操纵证书才可从事船舶操纵工作。
此外,船舶操纵人员还应熟悉船舶的舵盘和推进装置的操作原理,了解各种航行规则和导航标志的含义,熟悉船舶的操纵程序和操作要求。
其次,船舶操纵的安全操作规程要求船舶操纵人员应严格遵守各项规定和要求。
在船舶操纵过程中,船舶操纵人员应按照规定的航线和速度航行,不得随意更改航向和速度。
在遇到特殊情况或突发事件时,船舶操纵人员应根据相关规定和应急预案进行处理,确保船舶和人员的安全。
同时,船舶操纵人员还应注意与其他船舶和航行物保持安全距离,避免发生碰撞事故。
再次,船舶操纵的安全操作规程要求船舶操纵人员应保持良好的观察和判断能力。
船舶操纵人员应随时观察水面情况和航道状况,及时判断可能存在的障碍物和危险,并采取相应的措施进行规避。
在恶劣天气条件下,船舶操纵人员应根据天气状况和船舶性能进行合理的速度和航向调整,以确保船舶的稳定和安全。
最后,船舶操纵的安全操作规程要求船舶操纵人员应积极参与操纵过程中的沟通和协调。
船舶操纵人员应与其他船舶、港口和沿海管理机构进行有效的沟通和交流,确保船舶操纵过程中的信息畅通和有效传递。
同时,船舶操纵人员还应与船员团队密切合作,确保船舶操纵操作的准确和协调。
总之,船舶操纵的安全操作规程是确保船舶操纵安全和顺利的重要保障。
船舶操纵人员应具备相关资质和技能,严格遵守安全操作规程,保持良好的观察和判断能力,积极参与操纵过程的沟通和协调。
只有这样,才能确保船舶操纵过程中的安全和顺利,并最大限度地减少潜在的事故风险。
船舶操纵人员应不断提高自己的操纵能力和安全意识,与时俱进地适应并遵守相关规定和要求,为船舶操纵的安全做出自己的贡献。

船舶操纵知识点总结一、船舶操纵的基本原理1. 船舶操纵的基本原理船舶操纵的基本原理包括力学原理、流体力学原理、舵效原理等。
船舶操纵需要充分运用这些原理,使船舶按照预定的航线和速度进行满意的操纵。
2. 船舶操纵的影响因素船舶操纵受到多种因素的影响,包括船体外形、船舶速度、风、水流、潮汐等。
船舶操纵人员需要充分了解这些因素,并根据实际情况进行相应的操纵。
3. 船舶操纵的基本要求船舶操纵需要具备熟练的航海知识、良好的观察能力、灵活的应变能力和勇于决断的勇气。
只有具备这些基本要求,才能有效地进行船舶操纵。
二、船舶操纵的基本技能1. 舵船技术舵船技术是船舶操纵的基础技能,包括使用舵轮操纵舵机、控制船舶的方向和转向等。
舵船技术需要经过系统的培训和实际操作才能掌握。
2. 推进系统的控制推进系统的控制包括发动机的启停、提速、减速、倒档等操作。
船舶操纵人员需要熟练掌握推进系统的控制技巧,以保证船舶的安全和有效操纵。
3. 锚泊和系泊操纵锚泊和系泊是船舶在码头或锚地停靠的常见操作,需要掌握正确的操作技巧和方法。
船舶操纵人员需要了解锚泊和系泊的基本原理,并通过实际操作不断提高操纵水平。
4. 夜航和恶劣天气操纵夜航和恶劣天气下的船舶操纵是对船舶操纵人员技能和经验的严峻考验,需要充分了解航行规则和安全注意事项,以保证船舶的安全和有效操纵。
5. 危险情况处理在船舶操纵过程中,可能会出现各种突发情况,如火灾、漏水、船舶失速等。
船舶操纵人员需要具备处理突发情况的能力和经验,做到从容应对,确保船舶的安全。
三、船舶操纵的安全管理1. 船舶操纵的安全意识船舶操纵人员需要树立安全第一的理念,时刻关注船舶的安全状况,严格执行船舶操纵规程和操作规程,预防事故的发生。
2. 船舶操纵的安全规程船舶操纵过程中需要严格遵守安全规程,如不超速、不超载、不疲劳操纵等。
船舶操纵人员需要认真学习和执行这些规程,以保证船舶操纵的安全。
3. 船舶操纵的危险品管理船舶操纵人员需要熟悉危险品的特性和处理方法,正确使用和储存危险品,确保船舶和乘员的安全。

2. 碰撞后的应急操船措施333.抢滩34四、海上搜救34(1)单旋回(single turn) 34(2)Williamson 旋回(Williamson turn) 35(3)Scharnow 旋回(Scharnow turn) 35第一章船舶操纵绪论1.船舶操纵定义船舶操纵分为常规操纵和应急操纵两大类。
常规操纵包括用小舵角保持航向、中等舵角改变航向以及加速减速操纵;应急操纵包括用大舵角进行旋回的用全速倒车进行进行紧急停船。
还包括侧推设备和拖船协助。
2.研究内容船舶受控运动规律、船舶操纵安全标准、港口设计航道工程以及其他水工设施。
3.船舶分类小型船舶:一万吨以下;中型船舶:3-5万吨;大型船舶:载重吨8万吨以上、船长250米以上的船舶。
20万吨VLCC 30万吨ULCC。
4.船舶数据杂货船船速一般为13-18节方形系数为0.65-0.7散货船船速一般为12-17节方形系数为0.8-0.85油船船速一般为12-16节方形系数为0.8-0.85集装箱船船速14-25节方形系数0.5-0.75.船舶运动学参数船舶运动学参数包括位置、船速、漂角、转向角、角速度等。
漂角是指船舶重心处的船速矢量与船舶首位线之间的交角,漂角等于横向速度比纵向速度的反正切。
航向角是指水平面内船舶首尾线与固定坐标系X轴的交角。
船舶转动时,如果船上的每一点都绕某一垂线做圆周运动,这一垂线称为转轴,转轴与船舶首尾线的交点叫做转心。
定常旋回时,一般转心在船首之后约三分之一船长处。
船舶存在尾倾时转心向后移动。
在转心处只有平动没有转动。
转心处的漂角为0.只有纵向速度。
6.船舶操纵运动方程7.附加质量和附加惯性矩物体在流体中变速运动,推动物体的力不仅要为增加物体的动能做功,还要为增加周围流体的动能做功。
因此质量为m的物体要获得加速度a,施加在它上面的力F将大于物体质量m与加速度a的乘积,增加的这部分质量就是附加质量。
若写为公式,则:,称为该物体的附加质量。

操作规程船舶操作船舶操作操作规程1. 概述船舶操作是指在船舶航行、停泊、锚泊等各种操作状态下,进行船舶操纵、导航、安全措施以及应急处理等一系列操作工作。
为了确保船舶操作的安全、高效和规范,制定本操作规程,以规范船舶操作过程。
2. 船舶操纵2.1 舵操作a) 在舵操作前,舵手应仔细观察舵盘、船舶方向和水流状况,确保操作前的准备工作完成。
b) 在舵操作过程中,舵手应根据船舶需要进行适时的左转或右转,避免船舶与岩石、浅滩或其他船只发生碰撞。
c) 船舶操作过程中,舵手应密切观察航线、水流变化以及其他船舶的动态,及时调整舵盘,保持船舶安全控制。
2.2 速度调整a) 在进入狭窄水道、港口或停靠时,船长应适时调整船舶的速度,减缓航速,保持船舶稳定。
b) 在遇到恶劣天气等不良气候条件时,船长应根据实际情况合理调整船速,减小风浪对船舶的影响。
c) 船舶操作过程中,船长应根据船舶载重情况、水流速度和维护状态等因素,合理控制船舶的速度,保证安全操作。
3. 导航操作3.1 航向确定a) 在起航前,航海员应查看海图、海标等导航设备,确定船舶的航向,避免偏航和航线错误。
b) 在航行过程中,航海员应根据实际情况,及时调整船舶的航向,避免与其他船只或障碍物发生碰撞。
3.2 航速控制a) 在航行中,船长应按照船舶的航速计划,控制船舶的实际航速,并根据实际情况进行调整。
b) 船长和航海员应密切关注气象条件、海流变化以及其他航行船只的状况,合理控制船舶的航速,确保安全航行。
4. 安全措施4.1 线缆操作a) 在停泊或锚泊时,船员应按照操作流程将船舶与码头或锚地牢固连接,确保船舶停靠的安全性。
b) 在起航前,船员应检查船舶的系泊设施,确保其完好无损,以免影响船舶操作安全。
4.2 通信设备a) 船舶操作过程中,船员应保持通信设备畅通,确保与岸上船务人员和其他船只的有效沟通。
b) 船员应熟悉各类通信设备的使用方法,以便在紧急情况下能够及时与外界进行联系。



技能认证船舶操纵知识考试(习题卷13)第1部分:单项选择题,共88题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]额定船速是指:A)主机以海上常用功率和转速在深水中航行的静水船速B)主机以海上常用功率和转速在深水、风浪中航行的船速C)主机以额定功率和转速在深水中航行的静水船速D)主机以额定功率和转速在深水、风浪中航行的船速答案:C解析:2.[单选题]离泊时控制船舶的前后移动很重要,正确做法是:______。
①船舶的前后移动主要靠滞、溜缆绳来控制;②用车不能过大;③单绑的系缆不能松得过长A)①②B)②③C)①②③D)①③答案:C解析:3.[单选题]自动驾驶仪不但具备一般自动舵的航向保持功能,而且还能够?A)用于避让操纵B)随时定位C)保持船舶位置处于预定的航迹带内D)识别物标答案:C解析:4.[单选题]为保护自动舵,风浪大时,应将“灵敏度”调( )些,或者将航摆角调( )些A)高/大B)低/大C)高/小D)低/小答案:A解析:5.[单选题]船舶在波浪中的遭遇周期为12s,船舶自由横摇周期为________时产生的谐摇A)64~126SB)74~136SC)84~156SD)94~166S答案:C解析:C)船尾处旋回轨迹的切线与船舶首尾线之间的夹角D)转心处旋回轨迹的切线与船舶首尾线之间的夹角答案:B解析:7.[单选题]右旋单车船的车舵综合效应表现为_______。
A)船进车进,正舵,船首右转;B)船进车退,正舵,船首左转;C)船退车退,正舵,船首右转;D)船退车退,正舵,船首左转。
答案:C解析:8.[单选题]顶流前进抛锚法,应_______。
A)船抵锚位前,及早停车减速,保持缓慢速度接近第①落锚点,抛下惰锚(或上风舷锚)B)慢慢松出锚链至预定链长的2倍时,刹住惰锚锚链,抛下力锚(或下风舷锚)C)然后绞收惰锚锚链,松出力锚锚链,直至两锚链均等或预计长度时为止D)A+B+C答案:D解析:9.[单选题]深水区抛锚,锚地最大水深一般不得超过一舷锚链总长的:A)1/6B)1/5C)1/4D)1/3答案:C解析:10.[单选题]额定船速是指:A)主机以海上常用功率和转速在深水中航行的静水船速B)主机以海上常用功率和转速在深水、风浪中航行的船速C)主机以额定功率和转速在深水中航行的静水船速D)主机以额定功率和转速在深水、风浪中航行的船速答案:C解析:11.[单选题]船舶发生碰撞后,哪些情况下应采取抛弃货物的措施?()1因进水可能引起货物着火及货物急剧膨胀;2为了保持一定的剩余稳性;3为了保持一定的吃水差;4为保留储备浮力或减少进水量。