长方形桌子能在不平的地面放稳吗
- 格式:doc
- 大小:28.00 KB
- 文档页数:2
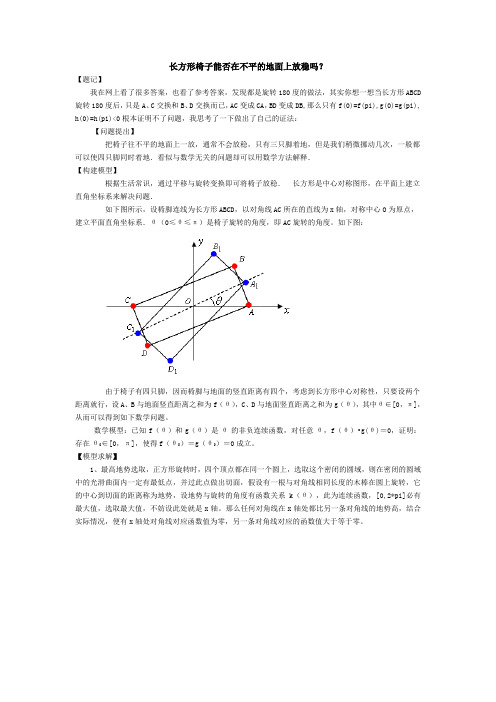
长方形椅子能否在不平的地面上放稳吗?【题记】我在网上看了很多答案,也看了参考答案,发现都是旋转180度的做法,其实你想一想当长方形ABCD 旋转180度后,只是A、C交换和B、D交换而已,AC变成CA,BD变成DB,那么只有f(0)=f(pi),g(0)=g(pi), h(0)=h(pi)<0根本证明不了问题,我思考了一下做出了自己的证法:【问题提出】把椅子往不平的地面上一放,通常不会放稳,只有三只脚着地,但是我们稍微挪动几次,一般都可以使四只脚同时着地.看似与数学无关的问题却可以用数学方法解释.【构建模型】根据生活常识,通过平移与旋转变换即可将椅子放稳.长方形是中心对称图形,在平面上建立直角坐标系来解决问题.如下图所示,设椅脚连线为长方形ABCD,以对角线AC所在的直线为x轴,对称中心O为原点,建立平面直角坐标系.θ(0≤θ≤π)是椅子旋转的角度,即AC旋转的角度。
如下图:由于椅子有四只脚,因而椅脚与地面的竖直距离有四个,考虑到长方形中心对称性,只要设两个距离就行,设A、B与地面竖直距离之和为f(θ),C、D与地面竖直距离之和为g(θ),其中θ∈[0,π],从而可以得到如下数学问题。
数学模型:已知f(θ)和g(θ)是θ的非负连续函数,对任意θ,f(θ)•g(θ)=0,证明:存在θ0∈[0,π],使得f(θ0)=g(θ0)=0成立。
【模型求解】1、最高地势选取,正方形旋转时,四个顶点都在同一个圆上,选取这个密闭的圆域,则在密闭的圆域中的光滑曲面内一定有最低点,并过此点做出切面,假设有一根与对角线相同长度的木棒在圆上旋转,它的中心到切面的距离称为地势,设地势与旋转的角度有函数关系k(θ),此为连续函数,[0,2*pi]必有最大值,选取最大值,不妨设此处就是x轴。
那么任何对角线在x轴处都比另一条对角线的地势高,结合实际情况,便有x轴处对角线对应函数值为零,另一条对角线对应的函数值大于等于零。
2、设h(θ)=f(θ)-g(θ),由于f(θ),g(θ)连续,所以h(θ)连续。


其次要把椅脚着地用数学符号表示出来。
椅子在不同位置时椅脚与地面的距离不同,当距离为0时,就是椅子四只脚着地,所以这个距离就是椅子位置变量θ的函数。
虽椅子有四只脚,四个距离,但由长方形是中心对称图形可用两个距离函数就行了。
A,C 两脚与地面的距离之和为()f θ
B,D 两脚与地面的距离之和为()g θ
由假设2知道地面为连续曲面所以()f θ,()g θ是连续函数。
由假设3可得对于任意的θ,()f θ,()g θ至少一个为0。
可以假设(0)f =0,(0)g 〉0,而当椅子旋转180度后,对角线AC ,BD 互换,于是()f π〉0,()g π=0。
这样,改变椅子的位置使四只脚着地,就归结为证明如下的数学问题:
已知()f θ,()g θ是θ的连续函数, 对任意的θ,()f θ*()g θ=0,而且()(0)0f g π==, (0)0,()0f g π>>。
证明存在0θ,使(0)(0)0f g θθ==。
五、模型求解
(显示模型的求解方法、步骤及运算程序、结果)
令()()()h f g θθθ=-,则(0)0h <和()0h π>。
由f 和g 的连续性知h 也是连续函数。
根据连续函数的基本性质,比存在0(0)θθπ<<使得(0)0h θ=,即(0)(0)f g θθ=。
最后因为(0)*(0)0f g θθ=,所以(0)(0)0f g θθ==。

长方形桌子能在不平的地面放稳吗?模型假设对桌子和地面应该作一些必要的假设:1.桌子四条腿一样长,桌脚与地面接触处可视为一个点,四角的连线呈长方形。
2.地面高度是连续变化的,沿任何方向都不会出现间断(没有像台阶那样的情况),即地面可视为数学上的连续曲面。
3.对桌脚的间距和桌腿的长度而言,地面是相对平坦的,使桌子在任何位置至少有三只脚同时着地。
模型构成首先要用变量表示桌子的位置。
注意到桌子呈长方形,以中心为对称点,长方形绕中心的旋转正好代表了桌子位置的变化,于是可以用旋转角度这一变量表示桌子的位置。
在图1中桌脚连线为长方形ABCD,对角线AC与x轴重合,桌子绕中心点O旋转角度θ后,长方形ABCD转至A’B’C’D’的位置,所以对角线AC与×轴的夹角θ表示了桌子的位置。
其次要把桌脚着地用数学符号表示出来。
如果用某个变量表示桌脚与地面的竖直距离,那么当这个距离为零时就是桌脚着地了。
桌子在不同位置时桌脚与地面的距离不同,所以这个距离是桌子位置变量θ的函数。
虽然桌子有四只脚,因而有四个距离,但是由于长方形的中心对称性,只要设两个距离函数就行了。
记A,B两脚距离之和为f(θ) .C,D两脚距离之和为g(θ)(f(θ),g(θ)≥0)。
由假设2,f和g都是连续函数。
由假设3,桌子在任何位置至少有三只脚着地,所以对于任意的θ,f(θ)和g(θ)中至少有一个为零。
不妨设g(θ)=0,f(θ)>0,而当桌子旋转180˚后,AB与CD互换,于是f(π)=0,g(π)>0.这样,改变桌子的位置使四只脚同时着地,就归结为证明如下的数学命题:已知f(θ)和g(θ)是θ的连续函数,对任意的θ,f(θ).g(θ)=0,且g(0)=f(π)0,f(θ)>0,g(π)>0。
证明存在θ。
,使f(θₒ)=g(θₒ)=0。
模型求解上述命题的解法令h(θ)=f(θ)- g(θ),则h(0)>0和h(π)<0。

什么样的桌子不能放东西?
问题:什么样的桌子不能放东西?
回答:
一个不能放东西的桌子,应该满足以下条件:
1. 桌子不存在:如果桌子根本不存在,那么自然无法在上面放任何东西。
2. 破损不堪的桌子:如果桌子因为破损而无法支撑物体,或者表面不平整、有
裂缝,那么放在上面的东西可能会滑落或者掉落。
3. 没有平面的桌子:如果桌子没有一个平坦的表面,或者表面有过多的凹凸不平,那么物体无法稳定地放置在上面。
4. 太小的桌子:如果桌子的面积太小,无法容纳要放置的物体,那么自然无法
放东西。
5. 没有支撑的桌子:如果桌子没有足够的支撑结构,例如缺少腿或者腿不稳固,那么放在上面的东西可能会导致桌子倾斜或者倒塌。
6. 不可靠的桌子:如果桌子的质量不可靠,容易折断或者崩溃,那么放置在上
面的东西可能会受到损坏。
总结:一个不能放东西的桌子可能是不存在的、破损不堪、没有平面、太小、
没有支撑或者不可靠的。
只有具备稳定平整的表面、足够的支撑结构和可靠的
质量的桌子,才能安全地放置东西。
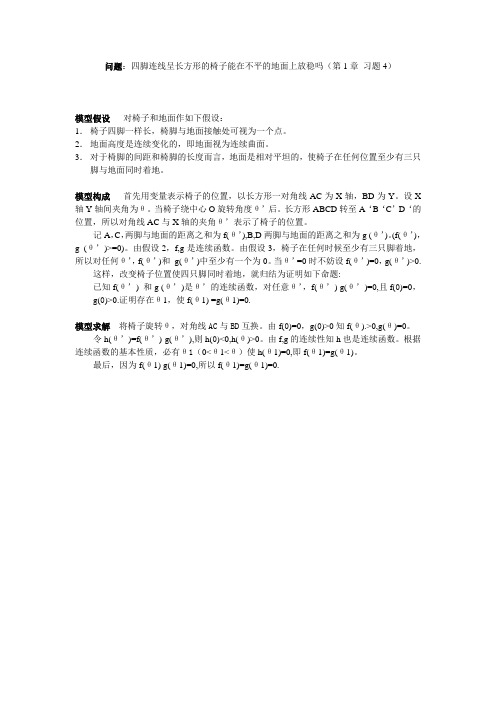
问题:四脚连线呈长方形的椅子能在不平的地面上放稳吗(第1章习题4)模型假设对椅子和地面作如下假设:1.椅子四脚一样长,椅脚与地面接触处可视为一个点。
2.地面高度是连续变化的,即地面视为连续曲面。
3.对于椅脚的间距和椅脚的长度而言,地面是相对平坦的,使椅子在任何位置至少有三只脚与地面同时着地。
模型构成首先用变量表示椅子的位置,以长方形一对角线AC为X轴,BD为Y。
设X 轴Y轴间夹角为θ。
当椅子绕中心O旋转角度θ’后。
长方形ABCD转至A‘B‘C’D‘的位置,所以对角线AC与X轴的夹角θ’表示了椅子的位置。
记A,C,两脚与地面的距离之和为f(θ’),B,D两脚与地面的距离之和为g (θ’)。
(f(θ’),g (θ’)>=0)。
由假设2,f,g是连续函数。
由假设3,椅子在任何时候至少有三只脚着地,所以对任何θ’,f(θ’)和g(θ’)中至少有一个为0。
当θ’=0时不妨设f(θ’)=0,g(θ’)>0.这样,改变椅子位置使四只脚同时着地,就归结为证明如下命题:已知f(θ’) 和g (θ’)是θ’的连续函数,对任意θ’,f(θ’) g(θ’)=0,且f(0)=0,g(0)>0.证明存在θ1,使f(θ1) =g(θ1)=0.模型求解将椅子旋转θ,对角线AC与BD互换。
由f(0)=0,g(0)>0知f(θ).>0,g(θ)=0。
令h(θ’)=f(θ’)-g(θ’),则h(0)<0,h(θ)>0。
由f,g的连续性知h也是连续函数。
根据连续函数的基本性质,必有θ1(0<θ1<θ)使h(θ1)=0,即f(θ1)=g(θ1)。
最后,因为f(θ1) g(θ1)=0,所以f(θ1)=g(θ1)=0.。

数学的实践与认识MATHEMATICS IN PRACTICE AND THEORY1999 Vol.29 No.3 P.62-65在不平地面上把椅子放稳的充分必要条件赵彦晖摘 要:把椅子放在不平的地面上,通常只有三只脚着地,放不稳,然而只需稍挪动几次,就可以使四只脚同时着地、放稳.本文指出,当且仅当椅子的四脚共圆时,才能在一般不平的地面上放稳,并对此建立了数学模型,给出了理论上的证明.关键词:椅子:不平地面;放稳;充分必要条件;数学模型The Sufficient and Necessary Condition toMake a Chair Steady on Uneven GroundZhao Yanhui(Xi′an Univ. of Arch. & Tech., Xi′an 710055)Abstract:Under normal conditions, it is impossible to make a chair Steady on uneven ground. In this paper, a mathematical model on this question is established, and it is proved that a sufficient and necessary conditon to make the chair Steady on uneven ground is four feet of the chair is on the common circle. Keywords:Chair, Uneven Ground, Stendy, Sufficient and Necessary Condition, Mathematical Model▲ 在不平的地面上能否把椅子放稳问题已在文[1]、[2]中作过介绍,但这些文献中都只就四脚连线呈正方形(或长方形)的椅子进行讨论.众所周知,我们日常生活中所遇到的椅子大都是四脚连线呈等腰梯形的椅子,那么,对这样的椅子甚至四脚连线为任意四边形的椅子是否也能在不平的地面上放稳?文[1]、[2]中并未讨论,也没有作出任何结论.对此,本文进行了全面的讨论,给出了完整的结论,使问题得到了圆满的解决.1 模型假设 首先讨论四脚共圆的椅子,对此,我们作如下的必要假设: 假设1 椅子四条腿一样长,椅脚与地面接触处可视为一个点,椅子四脚连线为圆内接四边形 即椅子四个脚共面且共圆. 假设2 地面高度是连续变化的,即地面可视为数学上的连续曲面. 假设3 对于椅脚的间距和椅腿的长度而言,地面是相对平坦的,使椅子在任何位置至少有三只脚同时着地. 上述假设显然是合理的[1].2 模型建立 将椅子放在地面上任一位置,并使至少三只脚同时着地.这时以椅子四脚共圆的圆心O为原点,四脚所在的平面为xoy坐标面,并使椅脚之一(如椅脚A)在x轴的正半轴上建立平面坐标系,如图1.图1 由假设1,椅子四脚A、B、C、D共圆,设其圆的半径为R,则这四点必在圆周x2+y2=R2 (1)上,且各点的坐标分别为A(R,0),B(Rcosθ1,Rsinθ1),C(Rcosθ2,Rsinθ2),D(Rcosθ3,Rsinθ3),其中θ1,θ2,θ3分别为OB、OC、OD与OA的夹角.显然,这三个夹角应满足条件0<θ1<θ2<θ3<2π (2) 如果让椅子绕O点转动,则A、B、C、D四点将同时绕O点转动,并且转过同样的角度.设转过的角度为θ(取逆时针方向为正),则转动后A、B、C、D四点对应的坐标分别为见图2.这样,参数θ就决定了椅子的位置.图2 由假设2,地面可视为数学上的连续曲面,因此,如果取过原点O,垂直于上述xoy面向上的轴为oz轴,则在如此选取的oxyz空间直角坐标系下,地面的方程便可写成z=f(x,y) (4)其中f(x,y)是x,y的二元连续函数.特别地,在圆周(1)上,z必为极角θ的以2π为周期的单值连续函数z=φ(θ) (5)于是,在空间直角坐标系下,地面上与(3)中A′,B′,C′,D′对应的点分别为 由假设3,地面是相对平坦的,使椅子在任何位置至少有三只脚同时着地.这样,改变椅子位置(即让椅子绕O点转动)能否使四脚同时着地的问题就归结为求解是否存在θ∈[0,2π]使(6)中A"、B"、C"、D"四点共面.这就是我们对该问题建立的数学模型.3 模型求解 上面所建立的数学模型即证明下面的定理 定理1 设φ(θ)是以2π为周期的连续函数,R>0,θ1,θ2,θ3是满足不等式(2)的任意常数,则一定存在θ0∈[0,2π],使当θ=θ0时(6)中A",B",C",D"四点共面. 证 A",B",C",D"四点共面的充要条件是 (7)记,则直接计算可知将F(θ)在[0,2π]上积分,注意到φ(θ)是以2π为周期的连续函数,R,θ1,θ2,θ3均为常数,则立可得出于是,由积分中值定理知,存在θ0∈[0,2π],使这说明,当θ=θ0时(7)式成立.从而,当θ=θ0时(6)中A",B",C",D"四点共面. 定理1说明,对四脚共圆的椅子,在不平的地面上,总可以经适当旋转把椅子放稳.4 放稳椅子的充要条件 前面,我们对四脚共圆的椅子进行了讨论,并建立了数学模型.那么,对四脚不共圆的椅子是否也能在一般不平的地面上放稳呢?回答是否定的,其反例如下: 例 设椅子的四脚共面但不共圆,地面为半径充分大的球面,则这样的椅子在相应的地面上总放不稳. 证 (用反证法) 假设在这样的球面上存在四点A、B、C、D使椅子的四脚在这四点同时着地,则这四点必共面,即在同一平面上.从而,这四点必在此平面与球面的交圆上,亦即,这四点必共圆.这就与椅子四脚不共圆矛盾,这个矛盾说明假设错而该例的结论真. 此例说明,当椅子四条腿一样长但四脚不共圆时,无论怎么放,也不可能在球面型的地面上放稳.而由前三部分所建立的数学模型及讨论说明,当椅子四条腿一样长且四脚共圆时,对任意的连续平坦地面,无论在何处,都可以经适当旋转把椅子放稳.这样,我们就证明了下面的结论: 定理2 在不平的地面上把椅子放稳的充分必要条件是椅子的四脚共圆.5 模型应用 椅子问题虽然是日常生活中一件非常普通的事,但在上段就一般椅子给出的结论对实践却有指导性的意义.通常,在制作椅子时,我们事先并不知道要把椅子放在什么样的地面上,因此,我们无法也不可能对地面提出任何要求,但为了保证椅子将来能在任何连续平坦的地面上放稳,我们可对椅子的设计提出一定的要求,这个要求就是,必须且只需把椅子做成四脚共圆或四脚连线呈圆内接四边形的形式.这也正好说明我们的祖先为什么都把椅子做成了正方形,长方形和等腰梯型,其原因就是它们都是圆内接四边形,这样的椅子能放稳. 当然,上述结论不只是对制作椅子有用,而对四脚共面的所有物体,如桌子,家用电器,甚至送上月球的四脚机器或设备等,都有设计方面的应用价值.■作者单位:赵彦晖(西安建筑科技大学,西安,710055)参考文献:[1]姜启源、数学模型,第二版,高等教育出版社,1993:8-11.[2]W.F.Lucas:Discrete and System Models.Springer-Verlay,1983收稿日期:1998-7-20在不平地面上把椅子放稳的充分必要条件作者:赵彦晖, Zhao Yanhui作者单位:西安建筑科技大学,西安,710055刊名:数学的实践与认识英文刊名:MATHEMATICS IN PRACTICE AND THEORY年,卷(期):1999,29(3)被引用次数:0次1.姜启源数学模型 19932.W F Lucas Discrete and System Models 1983本文链接:/Periodical_sxdsjyrs199903014.aspx授权使用:东北师范大学图书馆(dbsdt),授权号:d07db1fe-35e1-4bd7-bb46-9df1010755d9下载时间:2010年9月14日。

在不平的地面放稳椅子摘要针对在不平的地面将椅子放平稳的问题,文章建立了三个模型来解决该问题。
将椅子的四脚连线看作特殊的四边形进行求解。
对于问题1,正方形是最简单也是最特殊的一种情况,我们用连续函数零点存在定理,证明出一定可以使椅子放稳。
对于问题2,我们采用和问题1相同的方法与过程,证明出可以放稳。
对于问题3,等腰梯形和正方形、长方形有一些区别,它更加一般化,旋转的区间范围更大,在]2,0[ 上进行旋转,也可以找出能放稳的点,方法与问题1、问题2相同。
文章在解决这些特殊化问题后,对一般性结论进行了猜想与论证,并最终得出结论,对一般的四边形,也能使它在不平的地面上放稳。
关键词:椅子;不平地面;放稳;数学模型;连续函数;零点存在1.问题的重述在不平的地面上,椅子通常只有三只脚着地,只需稍挪动几次,就能使四只脚同时着地,即放稳了。
问题1:椅子四脚连线呈正方形;问题2:椅子四脚连线呈长方形;问题3:椅子四脚连线呈等腰梯形。
2.问题的分析当椅子放稳时应为椅子的四条腿同时着地(即椅子的四条腿脚与地面的的距离为零),用连续函数的零点存在定理,找出在某一范围内一定存在的点,能让四条腿同时着地。
3.模型的假设与符号说明3.1 模型的假设(1)假设一:椅子的四条腿一样长,将椅子与地面的接触看作一个点。
(2)假设二:将不平的地面看作连续的曲面,没有间断点。
(3)假设三:椅子在任何位置至少有三脚着地,才能保证椅子能放平稳。
3.2 符号说明符号一:D C B A ,,,为四边形上四点,',',','D C B A 为旋转后四边形上四点。
符号二:O 为四边形的中心。
符号三:θ为旋转角度。
4.模型的准备连续函数零点存在定理:对)(x F ∀,若)(x F 在],[b a 上为连续函数,且0)()(≤⋅b F a F ,则],[b a ∈∃ξ,使得0)(=ξF .5.模型的建立与求解5.1 问题1的模型建立与求解模型建立:1.正方形ABCD 为椅子四脚的连线,2.椅子中心为O 点,3.当椅子绕中心O 点旋转θ度后,椅子从正方形ABCD 变为正方 形''''D C B A ,旋转角度为θ.设椅脚C A ,与地面的距离之和为)(θf ,D B ,两脚与地面距离之和为)(θg ,其中)(θf 、)(θg ≥0。

不会晃的桌子,精妙桌腿设计,地不平也能让桌面保持平稳
本来,在外面享受一顿大餐,是一件幸福的事情,但是有时候,你的运气可没那么好,碰巧就挑了一张不稳的桌子,动一下晃一下,别说好心情一扫而空,稍微动作大点,可能连美食都会回归大地,渣渣都不给你剩。
有人说了,吃个饭还得自己垫桌脚,感觉有点亏,下次不来了。
因此,为了不让商家因为桌子晃而导致破产,给迈凯轮设计动力悬挂系统的大神出手了,亲自做了一款不会晃的桌子,NOROCK。
桌子晃的原因,一方面是本身的问题,这个好处理,但另外一方面则是地面不平的锅,能把这个问题解决掉,才是NOROCK真正的本事。
然而,现在的餐厅作起妖来可不是吃素的,弄个鹅卵石地面搞搞气氛,那是常有的事。
那NOROCK将如何做到全地形适应呢。
其实,桌子基座上简单的机械系统,就是其关键所在。
这个系统有四个支腿相互连接,在没有给它们压力时,桌腿会松散地配合在一起。
而一旦将桌子放置在不平坦的表面,NOROCK上的机械装置,就能使每个支脚上的平均重量负荷保持一致,自动调整各个支腿的高度,直到达到平衡状态。
而且,NOROCK的桌面还可以折叠,收纳很方便。
因此,这个曾获得过红点奖的设计,吸引了很多商家前来采购,
也收获了很好的效果。
毕竟,你就是把餐厅整出了越野障碍赛的架势,顾客照样能拥有一张稳定的桌子。
不倾倒的重心条件
一个物体不会倾倒的条件包括两方面,一是重心位置要在支撑面内,二是支撑面要足够稳定。
重心是一个物体整体的质心,它的位置决定了物体在重力作用下的平衡状态。
如果重心位置不在支撑面内,那么物体就会倾倒。
比如说一个立起来的圆柱,如果重心位置偏离圆柱底面的中心,那么圆柱就会倾倒。
另外一个条件是支撑面要足够稳定,不能够滑动或者摇晃。
如果支撑面不稳定,那么即使重心位置在支撑面内,物体也可能倾倒。
比如说一个书桌,如果桌腿不平衡或者地面不平整,就会导致桌子晃动,书本等物品就有可能掉落倾倒。
因此,要保证一个物体不倾倒,需要同时满足重心位置在支撑面内,且支撑面足够稳定。
这也是我们在日常生活中需要注意的地方,比如说放置物品时需要选择平稳的支撑面,不要将物品放在容易滑动的地方。
- 1 -。

摘 要本文讨论了桌子在不平的地面上能否放平的问题。
构造出函数()()()()()()()x D x C x B x A x H +-+=,得到()()000<-=D H ,()()0>=ππB L 运用了零点定理得到必有一点()0=x H 即()()()()0====x D x C x B x A 所以桌子可以放平。
关键词:零点定理一、 问题重述将一张四条腿的方桌放在不平的地面上,桌子四条腿的连线呈长方形,不允许将桌子移到别处,但允许其绕中心旋转,其是否总能设法使其四条腿同时落地?二、 符号说明()x A A 点到地的距离 ()x B B 点到地的距离 ()x C C 点到地的距离 ()x D D 点到地的距离三、模型假设1.地面为连续曲面; 2方桌的四条腿长度相同;3.相对于地面的弯曲程度而言,方桌的腿是足够长的;4.方桌的腿只要有一点接触地面就算着地;四、 模型建立与求解构造函数()x H得到()()()()()()()x D x C x B x A x H +-+=假设0=x 时,C B A ,,三个点着地,()()00D H -=旋转180度,即π=x ,则D C A ,,三个点着地,()()ππB L =图1 图2根据零点定理可得必有()0=CxA,所以4个DxBxH即()()()()0x====x点都着地。
五、模型优缺点及推广优点:运用了零点定理缺点:如果桌子的变化不是连续曲线将无法运用了零点定理推广:如果桌子的四条腿共圆,也可以得到在不平的水平面上面放平六、参考文献[1]杨启帆,数学建模,北京:高等教育出版社,2006.5.。

其次要把椅脚着地用数学符号表示出来。
椅子在不同位置时椅脚与地面的距离不同,当距离为0时,就是椅子四只脚着地,所以这个距离就是椅子位置变量θ的函数。
虽椅子有四只脚,四个距离,但由长方形是中心对称图形可用两个距离函数就行了。
A,C 两脚与地面的距离之和为()f θB,D 两脚与地面的距离之和为()g θ由假设2知道地面为连续曲面所以()f θ,()g θ是连续函数。
由假设3可得对于任意的θ,()f θ,()g θ至少一个为0。
可以假设(0)f =0,(0)g 〉0,而当椅子旋转180度后,对角线AC ,BD 互换,于是()f π〉0,()g π=0。
这样,改变椅子的位置使四只脚着地,就归结为证明如下的数学问题:已知()f θ,()g θ是θ的连续函数, 对任意的θ,()f θ*()g θ=0,而且()(0)0f g π==, (0)0,()0f g π>>。
证明存在0θ,使(0)(0)0f g θθ==。
五、模型求解(显示模型的求解方法、步骤及运算程序、结果)令()()()h f g θθθ=-,则(0)0h <和()0h π>。
由f 和g 的连续性知h 也是连续函数。
根据连续函数的基本性质,比存在0(0)θθπ<<使得(0)0h θ=,即(0)(0)f g θθ=。
最后因为(0)*(0)0f g θθ=,所以(0)(0)0f g θθ==。
文案 编辑词条B 添加义项?文案,原指放书的桌子,后来指在桌子上写字的人。
现在指的是公司或企业中从事文字工作的职位,就是以文字来表现已经制定的创意策略。
文案它不同于设计师用画面或其他手段的表现手法,它是一个与广告创意先后相继的表现的过程、发展的过程、深化的过程,多存在于广告公司,企业宣传,新闻策划等。
基本信息中文名称文案外文名称Copy目录1发展历程2主要工作3分类构成4基本要求5工作范围6文案写法7实际应用折叠编辑本段发展历程汉字"文案"(wén àn)是指古代官衙中掌管档案、负责起草文书的幕友,亦指官署中的公文、书信等;在现代,文案的称呼主要用在商业领域,其意义与中国古代所说的文案是有区别的。

【选修建模的⼩练习】长⽅形椅⼦的稳定性探究⼀.问题椅⼦四条腿的椅脚连线呈长⽅形能在不平的地⾯上放稳吗?⼆.问题分析经过分析,可以⽤变量表⽰椅⼦的位置,⽤函数表⽰椅⼦四脚与地⾯的距离,进⽽⽤数学语⾔把模型假设和椅脚同时着地表达出来.三模型假设(1)椅⼦四条腿⼀样长,椅脚与地⾯接触处视为⼀点,四脚的连线呈长⽅形.(2)地⾯⾼度是连续变化的,沿周围任意⽅向都不会出现间断 (⾼度突变),即地⾯是连续曲⾯.这个假设相当于给出了椅⼦能放稳的必要条件.(3)椅⼦在任何位置⾄少有三只脚同时着地.为保证这⼀点,要求对于椅脚的间距和椅腿的长度⽽⾔,地⾯是相对平坦的.因为在地⾯上与椅脚间距和椅腿长度的尺⼨⼤⼩相当的范围内,如果出现深沟或凸峰(即使是连续变化的),此时三只脚是⽆法同时着地的.四、模型建⽴综上可知,解决问题的关键在于选择合适的变量,把椅⼦四只脚同时着地表⽰出来.⾸先,引⼊合适的变量表⽰椅⼦位置的平移或旋转变换.其实平移椅⼦后问题的参数没有发⽣本质变化,所以将椅⼦就地旋转,找到椅⼦能放稳的条件.注意到椅脚连线呈长⽅形,是中⼼对称图形,绕它的对称中⼼旋转180度后,椅⼦仍在原地.把长⽅形绕它的对称中⼼O旋转,这可以表⽰椅⼦位置的改变。
于是,旋转⾓度θ这⼀变量就表⽰了椅⼦的位置.建⽴直⾓坐标系来解决问题.如下图所⽰,设椅脚连线为长⽅形ABCD,以对⾓线AC所在的直线为x轴,对称中⼼O为原点,建⽴平⾯直⾓坐标系.椅⼦绕O点沿逆时针⽅向旋转⾓度θ后,长⽅形ABCD转⾄A’B’C’D’的位置,这样就可以⽤旋转⾓θ(0≤θ≤π)表⽰出椅⼦绕点O旋转θ后的位置.其次,把椅脚是否着地⽤数学形式表⽰出来.我们知道,当椅脚与地⾯的竖直距离为零时,椅脚就着地了,⽽当这个距离⼤于零时,椅脚不着地.由于椅⼦在不同的位置是θ的函数,因此,椅脚与地⾯的竖直距离也是θ的函数.因为椅⼦四只脚与地⾯的竖直距离有四个θ相关的函数.⽽由假设(3)可知,椅⼦在任何位置⾄少有三只脚同时着地,即这四个函数函数值对于任意⾓度θ⾄少有三个同时为0.因此,只需引⼊两个距离函数即可.考虑到长⽅形ABCD是中⼼对称图形,绕其对称中⼼O沿逆时针⽅向旋转180°后,长⽅形位置不变,但A,C和B,D对换了.因此,记 A、B两脚与地⾯竖直距离之和为f(θ),C、D两脚与地⾯竖直距离之和为g(θ),其中θ∈[0,π],从⽽将原问题数学化。

椅子在不平地面放稳问题
1、问题提出
有四条腿成长方形的椅子,往往不能一次就平稳的放在不平的地面上,有时甚至放很久也放不稳,只好在某一条腿下面垫一点东西。
因此就产生这样一个问题,四腿椅子是否一定能在地面上放稳?
2、模型假设
假设椅子四条腿一样长,且设地面光滑(即把地面看做一个光滑曲面),旋转椅子时,保持椅子中心不动。
设椅子的四条腿分别是D C B A 、、、四点,取对角线AC 为χ轴,AC 与BD 的交点为原点O 。
用θ表示AC 绕O 点转动后与χ轴的夹角,用ϕ(对每件椅子是常数)表示对角夹角中小于︒90的角,如图2
3、符号说明
设()θg 表示为C A 、两点与地面距离之和,()θf 表示为D B 、两点与地面距离之和。
因为地面光滑,椅子转动时,()θg 、()θf 均为转角的连续函数,而三条腿总能同时着地,则对任意θ,有()()0g =⋅θθf 。
4、建立模型
设0=θ时,()()0000g >=f ,,证明:存在⎪⎭⎫ ⎝
⎛<<2000πθθ,使()()0g 00==θθf 。
5、模型求解
证明:令()()()θθθf g h -=,显然它是连续函数,且()()()0<-=θθθf g h ,将椅子保持中心不动顺时针旋转ϕ(即将AC 换成BD ),可得()()0g 0>=ϕϕ,f 。
因而()()()0>-=ϕϕϕf g h ,由连续函数的介值定理知,必存在⎪⎭⎫ ⎝
⎛<<2000πθθ,
使得()()()0000=-=θθθf g h ,即()()00θθf g =。
又因为()()000=⋅θθg f ,所以()()000==θθf g。
方桌问题一、模型准备首先我们必须明确建模的目的:判断四条腿的桌子在不平坦的地面上能否放稳。
要实现建模目的,我们首先要明确什么是放稳和放不稳?放稳的条件是什么?对于四条腿的桌子而言,所谓放不稳一般是指至多三只脚着地;所谓放稳,就是四只脚同时着地。
我们可以用四只脚与地面的垂直距离之和来表示。
如果四个距离之和为0,放稳;否则,称为放不稳。
二、模型假设○1桌子四条腿一样长,桌腿与地面接触处可视为数学上的点,四角的连线成长方形;○2对于桌脚的间距和桌腿的长度而言,地面是相对平坦的,使桌子在任何位置至少有三只脚同时着地;○3地面高度是连续变化的,可视为数学上的连续曲面,即沿任何方向都不会出现间断(陡坡)。
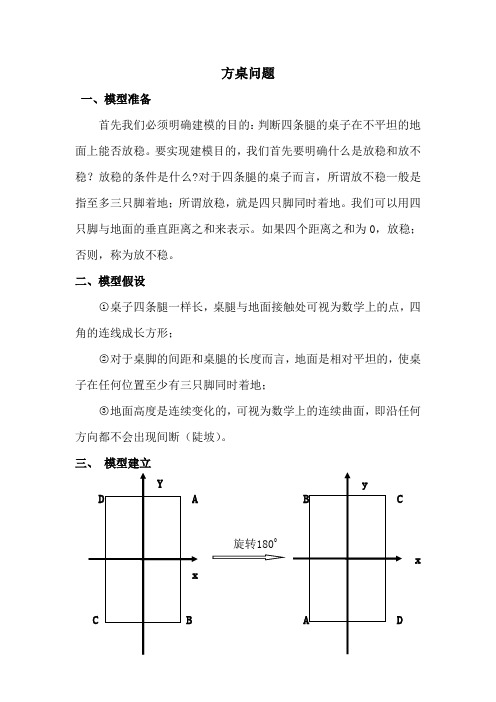
三、模型建立Y yD A B C旋转1800x O xC B A D为了刻画桌子的位置,我们必须建立直角坐标系。
由假设○1知,将四只脚与地面的接触点A 、B 、C 和D 连接所得四边形为以中心为对称点的长方形。
以过中心与AD 平行的直线为X 轴,过中心与AB 平行的直线为Y 轴建立如上所示的直角坐标系。
以θ来表示桌子旋转的角度,初始位置记为0,第二幅图恰好表示θ=1800。
因此我们可以用θ来刻画桌子的位置。
桌子四只脚A 、B 、C 和D 与地面的垂直距离就可以表示为关于θ的四个函数。
又由于长方形为中心对称,我们只要两个函数即可。
不妨设B 、C 两脚与地面距离之和为()(()0)f f θθ≥,A 、D 两脚与地面距离之和为()(()0)g g θθ≥。
由假设○2知,桌子在任何位置至少有三只脚同时着地,故必有连个相邻,即θ∀有()()0f g θθ=,也就是说()f θ、()g θ中至少有一个为0。
由假设○3地面可视为数学上的连续曲面知,()f θ、()g θ为θ的连续函数,不妨设(0)0,(0)0f g ≥=。
这样,判断四条腿的桌子在不平坦的地面上能否放稳的问题,就可以归结为证明如下数学命题:已知()f θ、()g θ为θ的连续函数,∀θ,有()()0f g θθ=,且(0)0,(0)0f g ≥=。
四、模型建立
(显示模型函数的构造过程)
在上述假设下,解决问题的关键在于选择合适的变量,把椅子四只脚同时着地表示出来.
首先,引入合适的变量来表示椅子位置的挪动.生活经验告诉我们,要把椅子通过挪动放稳,通常有拖动或转动椅子两种办法,也就是数学上所说的平移与旋转变换.然而,平移椅子后问题的条件没有发生本质变化,所以用平移的办法是不能解决问题的.于是可尝试将椅子就地旋转,并试图在旋转过程中找到一种椅子能放稳的情形.
注意到椅脚连线呈长方形,长方形是中心对称图形,绕它的对称中心旋转180度后,椅子仍在原地.把长方形绕它的对称中心O旋转,这可以表示椅子位置的改变。
于是,旋转角度θ这一变量就表示了椅子的位置.为此,在平面上建立直角坐标系来解决问题.
如下图所示,设椅脚连线为长方形ABCD,以对角线AC所在的直线为x轴,对称中心O为原点,建立平面直角坐标系.椅子绕O点沿逆时针方向旋转角度θ后,长方形ABCD转至A1B1C1D1 的位置,这样就可以用旋转角θ(0≤θ≤π)表示出椅子绕点O旋转θ后的位置.
其次,把椅脚是否着地用数学形式表示出来.
我们知道,当椅脚与地面的竖直距离为零时,椅脚就着地了,而当这个距离大于零时,椅脚不着地.由于椅子在不同的位置是θ的函数,因此,椅脚与地面的竖直距离也是θ的函数.
由于椅子有四只脚,因而椅脚与地面的竖直距离有四个,它们都是θ的函数.而由假设(3)可知,椅子在任何位置至少有三只脚同时着地,即这四个函数对于任意的θ,其函数值至少有三个同时为0.因此,只需引入两个距离函数即可.考虑到长方形ABCD是中心对称图形,绕其对称中心 O沿逆时针方向旋转180°后,长方形位置不变,但。
长方形桌子能在不平的地面放稳吗?
模型假设对桌子和地面应该作一些必要的假设:
1.桌子四条腿一样长,桌脚与地面接触处可视为一个点,四角的连线呈长方形。
2.地面高度是连续变化的,沿任何方向都不会出现间断(没有像台阶那样的情况),即地面可视为数学上的连续曲面。
3.对桌脚的间距和桌腿的长度而言,地面是相对平坦的,使桌子在任何位置至少有三只脚同时着地。
模型构成首先要用变量表示桌子的位置。
注意到桌子呈长方形,以中心为对称点,长方形绕中心的旋转正好代表了桌子位置的变化,于是可以用旋转角度这一变量表示桌子的位置。
在图1中桌脚连线为长方形ABCD,对角线AC与x轴重合,桌子绕中心点O旋转角度θ后,长方形ABCD转至A’B’C’D’的位置,所以对角线AC与×轴的夹角θ表示了桌子的位置。
其次要把桌脚着地用数学符号表示出来。
如果用某个变量表示桌脚与地面的竖直距离,那么当这个距离为零时就是桌脚着地了。
桌子在不同位置时桌脚与地面的距离不同,所以这个距离是桌子位置变量θ的函数。
虽然桌子有四只脚,因而有四个距离,但是由于长方形的中心对称性,只要设两个距离函数就行了。
记A,B两脚距离之和为f(θ) .C,D两脚距离之和为g(θ)(f(θ),g(θ)≥0)。
由
假设2,f和g都是连续函数。
由假设3,桌子在任何位置至少有三只脚着地,所以对于任意的θ,f(θ)和g(θ)中至少有一个为零。
不妨设g(θ)=0,f(θ)>0,而当桌子旋转180˚后,AB与CD互换,于是f(π)=0,g(π)>0.这样,改变桌子的位置使四只脚同时着地,就归结为证明如下的数学命题:
已知f(θ)和g(θ)是θ的连续函数,对任意的θ,f(θ).g(θ)=0,且g(0)=f(π)0,f(θ)>0,g(π)>0。
证明存在θ。
,使f(θₒ)=g(θₒ)=0。
模型求解上述命题的解法
令h(θ)=f(θ)- g(θ),则h(0)>0和h(π)<0。
由f和g的连续性知h也是连续函数。
根据连续函数的基本性质,必存在θ。
,使f(θₒ)=g(θₒ)。
最后,因为f(θ).g(θ)=0,所以f(θₒ)=g(θₒ)=0。