机器人外轴替代法在自动涂装业的应用
- 格式:pdf
- 大小:1.43 MB
- 文档页数:3
机器人技术在机械工程中的应用
机器人技术在机械工程中的应用非常广泛。
以下是一些主要的应用领域:
1. 自动化生产线:在制造业中,机器人被用于自动化生产线,执行重复性、繁琐的工作,如焊接、喷涂等工艺,从而提高生产效率和质量,并减少人力成本。
例如,在汽车制造业中,焊接和喷涂等工艺都可以通过机器人来完成。
2. 机械加工:虽然机器人在机械加工行业的应用占比不大,但它们主要用于零件铸造、激光切割和水射流切割等复杂工艺。
3. 喷涂应用:机器人喷涂主要是指涂装、点胶、喷漆等工作,约有4%的工业机器人从事喷涂工作。
4. 装配应用:装配机器人主要从事零件的安装、拆卸和维修。
然而,由于近年来机器人传感器技术的快速发展,机器人的应用越来越多样化,直接导致机器人装配应用比例的下降。
5. 焊接应用:机器人焊接的应用主要包括汽车工业中使用的点焊和弧焊。
虽然点焊机器人比弧焊机器人更受欢迎,但弧焊机器人近年来发展迅速。
焊接机器人逐渐被引入许多加工车间,以实现自动焊接操作。
6. 搬运应用:目前,搬运是机器人最大的应用领域,约占机器人应用的40%。
许多自动化生产线需要机器人进行装卸、搬运和码垛。
除此之外,还有许多其他领域,比如检查和测试等也在使用机器人技术。
总的来说,随着技术的发展,机器人将在机械工程中发挥越来越重要的作用。


工业机器人在汽车制造业的喷涂与涂胶功能嘿,咱们今天来聊聊工业机器人在汽车制造业里那神奇的喷涂与涂胶功能!你知道吗?我曾经去一家汽车制造工厂参观过,那场面,真叫一个震撼!一走进车间,最先映入眼帘的就是那些有条不紊工作着的工业机器人。
它们就像是训练有素的士兵,精准地执行着每一项任务。
先来说说喷涂吧。
过去,汽车的喷涂工作可都是靠人工完成的,效率低不说,还很难保证每一辆车的喷涂质量都一致。
但有了工业机器人,情况就大不一样啦!这些机器人就像是拥有了超能力,它们的喷枪能精确地控制涂料的流量和喷射角度,让每一滴涂料都乖乖地落在该落的地方。
而且啊,它们的动作那叫一个迅速,一辆车的喷涂工作眨眼间就能完成。
记得我当时看到一个工业机器人正在给一辆汽车的车身进行喷涂,它的机械臂灵活地移动着,喷枪均匀地喷出涂料,那细腻的喷雾就像是一层薄薄的轻纱,轻轻地覆盖在车身上。
我凑近仔细看,发现喷涂的表面光滑无比,没有一点瑕疵,这效果简直比人工喷涂好太多啦!再讲讲涂胶。
汽车制造中很多地方都需要涂胶,比如车窗玻璃的安装、车身部件的拼接等等。
以前人工涂胶的时候,工人得小心翼翼地操作,稍不留神就可能涂得不均匀或者出现漏涂的情况。
但工业机器人可不会犯这样的错误。
它们能够根据预设的程序,精确地控制涂胶的路径和胶量,确保每一处需要涂胶的地方都能得到恰到好处的处理。
我看到一个机器人在给车窗涂胶,它的动作十分轻柔,就好像在呵护一件珍贵的宝贝。
涂出来的胶线均匀笔直,简直就是一件艺术品。
而且,这些机器人工作起来不知疲倦,一天能完成大量的涂胶任务,大大提高了生产效率。
工业机器人的出现,真的让汽车制造业发生了翻天覆地的变化。
它们不仅提高了生产效率和产品质量,还降低了生产成本。
想象一下,如果没有这些厉害的工业机器人,汽车制造的过程得多么繁琐和困难呀!总之,工业机器人在汽车制造业的喷涂与涂胶功能实在是太强大啦!相信在未来,它们还会不断进化,为汽车制造业带来更多的惊喜和突破!怎么样,是不是觉得很神奇呢?。

喷涂机器人关键技术研究及发展前景标题:喷涂机器人关键技术研究及发展前景简介:喷涂机器人作为现代工业生产中不可或缺的一环,已经得到广泛应用。
本文将深入探讨喷涂机器人的关键技术,包括机器人运动控制、喷涂过程感知与规划、喷涂精度和效率提升等方面,并展望喷涂机器人在未来的发展前景。
第一部分:机器人运动控制技术在喷涂过程中,机器人运动控制技术是十分重要的一项关键技术。
机器人需要准确、稳定地进行路径规划和速度控制,以确保喷涂作业的质量和效率。
本部分将介绍常见的机器人运动控制算法,如PID控制、模糊控制和自适应控制,并探讨其在喷涂机器人中的应用。
第二部分:喷涂过程感知与规划技术为了实现精确的喷涂作业,喷涂机器人需要具备感知和规划的能力。
本部分将介绍基于视觉传感器、力传感器和位置传感器等技术的喷涂过程感知方法,并探讨使用路径规划和轨迹规划技术来提高喷涂作业的准确性和效率。
第三部分:喷涂精度和效率提升技术提高喷涂精度和效率是喷涂机器人研究的重要目标之一。
本部分将介绍涂层厚度检测和控制技术、喷嘴尺寸和喷嘴设计优化技术、喷涂速度和角度控制技术等,以及它们在提高喷涂精度和效率方面的应用。
第四部分:喷涂机器人的发展前景喷涂机器人作为一种高效、精确、环保的喷涂工具,在未来将有广阔的应用前景。
本部分将探讨喷涂机器人在汽车制造、航空航天、建筑装饰等领域的应用,并提出对未来喷涂机器人发展的展望。
结论:本文深入研究了喷涂机器人的关键技术,包括机器人运动控制、喷涂过程感知与规划、喷涂精度和效率提升等方面。
通过分析和讨论这些技术的应用和发展前景,可以看出喷涂机器人在工业生产中的重要性和潜力。
未来,随着技术的进一步发展和创新,喷涂机器人将继续为各行各业带来更高效、更精确的喷涂解决方案。
观点和理解:根据对喷涂机器人关键技术的研究和对未来发展前景的展望,我认为喷涂机器人在工业应用中将扮演着更为重要的角色。
随着制造业的发展,喷涂机器人将逐渐取代传统的人工喷涂工艺,提高生产效率和质量,并且能够适应更多复杂的喷涂任务。

机器人喷涂在汽车涂装中的应用随着科技的发展和人们对汽车外观要求的提升,机器人喷涂在汽车涂装中的应用越来越广泛。
相比于传统的人工喷涂,机器人喷涂具有效率高、质量稳定、精度高等优势,成为现代汽车生产线中不可或缺的一部分。
一、机器人喷涂的基本工作原理机器人喷涂主要通过机器人臂进行喷涂工作。
机器人臂通过控制系统精确地操控喷枪,将喷涂材料均匀地喷涂在汽车表面上。
喷涂的过程需要根据车身形状和涂料要求进行程序设计,通过操控机器人臂的运动路径和喷枪的喷涂参数来实现。
1. 喷涂质量稳定:机器人喷涂可以保证喷涂的均匀性和一致性,避免了因为人工操作的差异而引起的涂装质量不稳定的问题。
机器人喷涂可以保证每辆汽车的喷涂效果一致,提高了整个生产线的效率和品质。
2. 喷涂速度快:机器人喷涂可以根据生产需求快速调整喷涂速度,而且操作时间短,能够节省人力资源和时间成本。
机器人喷涂可以在短时间内完成大量的涂装工作,提高了生产效率和产能。
3. 精度高:机器人喷涂可以根据程序设计精确控制喷涂位置和喷涂量,确保每个喷涂部位都能够得到均匀的涂料覆盖,避免出现色差和漏喷等问题。
机器人喷涂的精度高,可以满足消费者对汽车外观的高要求。
4. 适应多种涂装工艺:机器人喷涂可以适应不同的涂装工艺,包括底漆、面漆、清漆等不同种类的涂料喷涂工艺。
机器人喷涂可以根据不同的涂装要求进行程序切换和调整,满足各种不同款式和要求的汽车涂装工艺。
5. 安全环保:机器人喷涂相比于传统的人工喷涂更加安全环保。
机器人喷涂可以减少操作人员的接触和暴露在有害气体和化学物质中的风险。
机器人喷涂也可以控制喷涂量和喷涂厚度,减少涂料的浪费和对环境的污染。
随着汽车行业的发展和人们对汽车外观要求的提升,机器人喷涂在汽车制造行业中有着广阔的前景。
机器人喷涂可以提高生产效率和涂装质量,降低生产成本和工人的劳动强度。
机器人喷涂可以根据不同的涂装要求进行程序切换,满足个性化需求,提供更多的汽车外观选择。

自动涂胶机械手工作站南华大学机械工程学院毕业设计(论文)自动涂胶机械手工作站摘要:本文对机器人在汽车玻璃自动涂胶系统的应用进行了阐述~对机器人工作站中的主要组合部件设计和功能进行了详细的说明。
自动涂胶工作站更加优越于手工涂胶。
手工涂胶难以保证涂胶的一致性~自动涂胶站保证了涂胶的均匀性、一致性、准确的涂敷位置以及优良的生产质量。
本文对工作站中的机械布局和定位夹紧原理进行了分析。
从机器人挡风玻璃涂胶系统的生产实际需要出发~提出了一套玻璃自动对中识别装置~可以对不同规格型号的玻璃进行自动对中识别~提高了生产的柔性。
根据设计经验简单论述了此套系统的工作节拍。
重点论述了装夹定位和六自由度问题。
关键词:汽车, 自动涂胶, 机械手第 1 页共 48 页南华大学机械工程学院毕业设计(论文)Automatic coating robot workstationAbstract: In this paper, the robot automatically in the auto glass adhesive application system, a set of robotic workstations in the main mix design and function of components described in detail. Automatic adhesive coating station is more superior to manual. Manual adhesive is difficult to guarantee the consistency of glue, automatic adhesive coating station ensures the uniformity, consistency, accuracy of the coating location and excellent production quality. In this paper, workstation layout and positioning of mechanical clamping principle isanalyzed. Robot windshield adhesive from the actual needs of production system, a set of automatic glass on the identification device can be of different types of glass specifications automatically identify and improve production flexibility. Discussed according to the design experience, this set of simple systems work the beat. Focuses on the issue of clamping position and six degrees of freedom.Key words:automotive;automatic potting;mechanical hand第 2 页共 48 页南华大学机械工程学院毕业设计(论文)目录1 绪论 (1)1.1 背景 (2)1.2 机器人的定义及分类 (3)1.3 涂胶机器人的发展与应用 (9)1.4 课题的提出、目的及意义 (9)1.5 主要研究内容 (10)2 自动涂胶机械手工作站的总体设计方案 (11)2.1 涂胶机器人整体设计方案解析 (11)2.2 涂胶机器人结构方案设计 (12)2.3本章小结 (20)3 涂胶机械手工作站机械系统的设计 (21)3.1 设计原则 (21)3.2 涂胶机方案的确定 (21)3.3 机器人涂胶工作站的总体布局 (21)3.4 系统的工作节拍 (27)3.5 控制系统 (28)3.6 本章小结 (28)4 涂胶机械手工作站控制系统的设计 (29)4.1控制系统简介 (29)4.2 控制系统方案介绍 (30)参考文献 (31)谢辞 (32)第 3 页共 48 页南华大学机械工程学院毕业设计(论文)附录 (33)第 4 页共 48 页南华大学机械工程学院毕业设计(论文)毕业设计作为大学里的最后一次设计任务,是一次对自己专业知识系统学习的总结与检验,旨在培养自己综合运用所学基础知识、专业知识去分析和解决实际生产中所遇到的问题的能力,树立正确的设计思想,学会运用正确的设计方法进行设计,通过运用设计标准、设计规范、手册、图册以及查阅技术资料来指导自己的设计,锻炼自己的动手能力,绘图能力,通过设计去发现问题,找到问题,解决问题,为今后走向社会打下坚实的基础。
工业自动化中的机器人喷涂技术随着科技的进步,工业自动化得到了快速的发展。
在许多行业中,机器人喷涂技术已经成为了必不可少的一部分。
这种技术不仅可以提高生产效率,还可以降低成本,同时还可以提高产品的质量。
下面我们就来详细了解一下机器人喷涂技术在工业自动化中的应用和发展。
一、机器人喷涂技术的优势机器人喷涂技术相较于传统的喷涂技术,具有很多优势。
首先,机器人喷涂可以实现自动化生产,减少人工干预,避免了人为因素对喷涂质量的影响,并且可以消除因为疲劳或者失误导致的工作质量下降的问题。
其次,机器人喷涂的精度高、稳定性强、喷涂速度快、盈利高、耗材回收方便等特点使得机器人喷涂技术在自动化生产线上被广泛应用。
二、机器人喷涂技术的应用范围机器人喷涂技术广泛应用于汽车、电器、化工、航空、建材等各个领域。
在汽车制造中,机器人喷涂能够提高生产效率和品质,减少洁净度的影响。
在电器制造中,机器人喷涂能够提高设备的安全性、降低成本和提高设备的生产率,同时保证产品的一致性。
在化工领域,机器人喷涂可用于制造各种化工轻质互换器,这也成为化学工业自动化的一个重要组成部分。
在航空领域,机器人喷涂能够对飞机的外表进行表面涂层处理,在肉眼无法分辨的程度上有效避免涂料飛溅,提高喷涂工作的精度和效率。
在建材领域,机器人喷涂可用于对各种装饰材料进行涂层处理。
三、机器人喷涂技术的发展趋势随着工业自动化的不断发展,机器人喷涂技术也不断推陈出新,不断提高产品质量和生产效率。
未来,机器人喷涂技术在自动化生产线上的应用将会更加广泛。
同时,人工智能技术的发展也将会提高机器人喷涂的反应速度和精度。
四、机器人喷涂技术的未来在未来,如果机器人喷涂技术继续发展壮大,将会对全球经济产生重大作用。
同时,许多新兴产业的崛起,也将会推动机器人喷涂技术的应用发展。
鉴于目前机器人喷涂技术还存在一些不足,比如喷涂效果不稳定、生产效率低等问题,相信未来机器人喷涂技术将会继续发挥更大的作用和潜力。
喷漆机器人的应用与展望摘要:喷漆机器人是机器人技术与表面喷漆工艺相结合的产物,为特种机器人,具有可扩展、高稳定性、安全防爆、人机交互等优点。
目前,喷漆机器人已广泛应用于国内外汽车、飞机以及部分家电生产线上,是提高生产效率、降低劳动成本的重要技术手段。
文中对喷漆机器人的特点、发展现状以及飞机自动化喷漆研究进展等进行了简要概述,最后对喷漆机器人发展趋势进行了展望。
关键词:喷漆机器人;自动化喷涂;研究现状0 引言传统的表面喷漆涂技术都是以手工方式进行产品表面的喷漆涂作业,在此过程中产生的大量苯、醛类、胺类等造成环境污染的有害物质及气体,影响到操作工人的健康,喷涂质量受操作人员的技术水平影响较大,造成返喷率高,制约了生产能力。
自动喷涂机则克服了这一缺点。
但是由于喷涂机只能完成一些简单的往复直线运动,而被涂工件表面的多样性及复杂性使得喷涂机的使用受到一定的限制。
随着机器人技术在工业生产领域的不断扩展,机器人也被用来进行涂装作业,进而产生了一个新的机器人品种——喷漆机器人。
1 喷漆机器人工作原理及特点喷漆机器人的工作原理是利用大量的压缩空气气流把油漆等漆料雾化成细小的液滴,并由气流带动小液滴均匀喷洒在工件表面,以达到喷涂工件的目的。
喷涂机器人除拥有工业机器人的优点外,最大的特点是防爆设计和管路内置设计。
防爆设计:目前主流喷涂机器人采用的是气体正压防爆模式,经过特别设计的机器人壳体包裹了机器人的各类电子元器件和电缆,喷涂机器人在进行喷涂作业时,壳体内部加高压阻燃气体进行吹扫,有效杜绝危险。
管路内置设计:喷涂作业所用的涂料或油漆为有一定粘度的流体,正常需要干燥固化才算完成喷涂作业,机器人手臂及附着于机器人手臂上的活动组件均不能接触到被喷表面,以免影响喷涂质量。
因此安装在机器人手臂末端的喷枪输漆管路需要内置于机器人手臂,即所有管路从机器人手臂内部穿过。
与外置管路和电子零部件的工业机器人相比,喷涂机器人的活动范围有一定限制。
喷涂机器人项目可行性研究报告一、项目背景近年来,随着社会发展和科技进步,自动化技术在各个领域得到了广泛应用。
喷涂机器人作为自动控制装置与涂装设备的有机结合体,可以广泛应用于汽车制造、船舶涂装、家具制造等工业领域。
本报告对喷涂机器人项目的可行性进行研究分析。
二、市场分析喷涂机器人作为一项自动喷涂技术,能够提高工作效率、保证喷涂质量,并在一定程度上减少人工成本。
目前,在汽车制造、船舶制造、家具制造等领域对喷涂机器人的需求较为稳定。
根据市场调研数据显示,随着产业升级的推进,涂装行业对喷涂机器人的需求量还将进一步增加。
因此,喷涂机器人项目具有较好的市场前景。
三、技术分析喷涂机器人项目所涉及的自动控制、喷涂技术等关键技术已经比较成熟。
自动控制方面,利用先进的传感器和控制系统,可以实现机器人的自主运行和定位;喷涂技术方面,采用先进的气动喷涂或电泳喷涂技术,可以实现高质量的涂装效果。
此外,项目还需要考虑对不同物体的适应性,即使在不同形状和表面的物体上也能够完成高质量的喷涂作业。
四、成本效益分析喷涂机器人项目的投资主要包括机器人设备、喷涂设备和自动控制系统。
根据市场调研数据显示,当前项目的投资额大约在500万元左右。
然而,该项目将取代人工喷涂过程,减少人工成本开支。
同时,通过自动控制和精准喷涂技术的应用,可以提高涂装效率和质量,从而为用户带来更大的经济效益。
五、风险分析喷涂机器人项目面临的主要风险包括技术风险、市场风险和运营风险。
技术风险主要指的是喷涂机器人的控制和喷涂技术是否能够达到预期效果。
市场风险主要指的是市场需求是否能够维持稳定,以及竞争对手可能带来的压力。
运营风险主要指的是项目运营会不会遇到资金问题、设备维修等各种意外情况。
在项目实施过程中,需要采取一系列有效的风险管理措施,以最大限度地降低风险。
六、可行性结论综合以上分析,喷涂机器人项目具有较好的市场前景和成本效益。
尽管项目面临一定的技术风险、市场风险和运营风险,但通过采取相应的风险管理措施,可以降低风险,并确保项目的成功实施。

喷涂机器人运动学和轨迹规划算法研究喷涂机器人是一种广泛应用于工业涂装领域的自动化设备,其主要功能是对工件表面进行喷涂处理。
机器人喷涂过程中的运动学和轨迹规划是其关键技术之一,对整个喷涂过程的效率和质量具有重要影响。
本文将对喷涂机器人的运动学和轨迹规划算法进行研究。
我们需要了解喷涂机器人的运动学特性。
喷涂机器人通常采用关节式结构,具有多个旋转关节,可以实现多个自由度的运动。
运动学主要研究机器人末端执行器的位置和姿态随各关节转动角度的变化关系。
运动学模型可以通过建立机器人的几何模型和运动方程组来实现。
在运动学模型的基础上,我们可以对喷涂机器人的轨迹规划进行研究。
轨迹规划是指生成机器人末端执行器的运动轨迹,以实现所需的喷涂路径。
常见的轨迹规划算法包括直线轨迹规划、插补轨迹规划和平滑轨迹规划等。
直线轨迹规划是指沿着直线路径进行喷涂,其主要通过控制机器人的关节转动角度实现。
直线轨迹规划比较简单,只需确定起点和终点的位置坐标,并通过关节控制实现直线移动即可。
但直线轨迹规划无法应对大范围的曲线喷涂需求。
插补轨迹规划是指通过插补一系列离散点来实现曲线路径的喷涂。
插补轨迹规划需要对离散点之间进行插值,生成平滑的喷涂路径。
常见的插值方法有线性插值、二次插值和三次插值等。
插补轨迹规划可以适应更复杂的喷涂路径需求,但在插值过程中可能会出现不连续的情况,影响喷涂质量。
平滑轨迹规划是指通过优化算法来生成平滑的喷涂轨迹。
平滑轨迹规划通常通过优化目标函数,如最小化曲线的曲率和允许的加速度等来实现。
常见的平滑轨迹规划算法有贝塞尔曲线、样条曲线和四次多项式等。
平滑轨迹规划可以生成连续平滑的喷涂路径,提高喷涂质量。
喷涂机器人的运动学和轨迹规划算法是实现喷涂过程的关键技术。
运动学模型可以帮助确定机器人末端执行器的位置和姿态,为轨迹规划提供基础。
而轨迹规划算法可以根据具体喷涂路径需求选择合适的方法,生成相应的喷涂轨迹。
通过运动学和轨迹规划的研究,可以提高喷涂机器人的运动精度和喷涂质量,实现自动化喷涂的高效生产。

喷涂机器人设计毕业设计论文毕业设计题目:喷涂机器人子题:专业:机械工程及自动化指导教师:学生姓名:班级-学号:机自084-32012 年 6 月大连工业大学本科毕业设计喷涂机器人Spraying painting robot 设计完成日期2012 年 6 月 5 日学院:机械工程与自动化专业:机械工程及自动化学生姓名:徐大鹏班级学号:机自084-3指导教师:高腾评阅教师:2012 年 6 月大连工业大学2012届本科生毕业设计摘要机器人是一种机械技术与电子技术相结合的高技术产品。
采用机器人是提高产品质量与劳动生产率,实现生产过程自动化,改善劳动条件,减轻劳动强度的一种有效手段。
它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术装备。
机器人可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和生产自动化水平。
工业生产中经常出现的笨重工件的搬运和长期、频繁、单调的操作,采用机器人是有效的;此外,它能在高温、低温、深水、宇宙、放射性和其它有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
本课题的主要内容是采用机器人代替人来进行喷漆作业,机器人可以代替很多重复性的体力劳动,从而减轻工人的劳动强度,提高生产效率。
结合设计的各方面的知识,在设计过程中学会怎样发现问题。
解决问题.研究问题。
并且在设计中融入自己的想法和构思,提高自己的创新能力。
尽力使机器人使用方便,结构简单。
关键词:机器人;结构设计;步进电机;回转- I - Abstract 大连工业大学2012届本科生毕业设计 A robot is a mechanical technology and electronic technology, the combination of high technology products. The robot is to improve product quality and labor productivity, and achieve the production process automation, improve working conditions, reduce the labor intensity of an effective means of. It is a copy of the upper part of the human body functions, in accordance with a predetermined transfer request or the workpiece hold the tools to operate the automation technology and equipment. The robot can replace the staff of the heavy labor, significantly reduced labor intensity of workers, improve working conditions, improve labor productivity and production level of automation. Industrial production often appears in the heavy work, frequenthandling and long-term, monotonous operation, the robot is effective; in addition, it can be in high temperature, low temperature, water, the universe, radioactive and other toxic, pollution of the environment under the conditions of operation, but also show its superiority, there are broad development prospects. The main content of this paper is the use of robots to paint, robots can take the place of a lot of repetitive manual work, thereby reducing the labor intensity of workers, improve the production efficiency. Combined with the design of the various aspects of knowledge, in the design process to learn how to find problems. To solve the problem of problem. And in the design into their thoughts and ideas, enhance own innovation ability. Try to make the robot has the advantages of convenient use, simple structure. Key Words: Robot;structure design;stepper motor;rotary - II - 大连工业大学2012届本科生毕业设计目录摘要 (I)Abstract (II)目录……………………………………………………………………………..II 第1章绪论………………………………………………………………………1 机器人的特点……………………………………………………………….1 机器人的组成……………………………………………………………….2 执行机构……………………………………………………………...2 驱动机构……………………………………………………………...2 控制机构……………………………………………………………...3 喷涂机器人………………………………………………………………….3 研究主要内容…………………………………………………………3 第2章机器人机构总体方案设计………………………………………………..5 喷涂机器人的基本技术参数确定………………………………………….5 自度………………………………………………………………...5 坐标形式的选择……………………………………………………...5 规格参数……………………………………………………………...7 有效负载……………………………………………………………...7 运动特性……………………………………………………………...8 工作范围……………………………………………………………...8 喷涂机器人材料的选择............................................................8 机械臂的运动方式...................................................................9 喷涂机器人的驱动元件.............................................................10 机构整体设计.......................................................................11立柱回转关节设计..................................................................12 第3章喷涂机器人结构设计..............................................................14 机器人腰座结构的设计............................................................14 机器人手臂的结构设计............................................................15 机器人腕部的结构设计..........................................................16 机器人末端执行器的设计. (17)- III -大连工业大学2012届本科生毕业设计大小臂(关节2和关节3)电机的计算与型号选择............................16 电机的计算...................................................................17 主要零件材料的选择与强度校核 (1)8 齿轮系材料的选择………………………………………………….19 齿轮副的强度校核………………………………………………...20 本章小结……………………………………………………...…………….24 第4章臂部结构和基座设计……………………………………………………25 大、小臂部结构设计………………………………………………...……25 基座设计..............................................................................错误!未定义书签。

喷涂机器人的关键技术研究及发展趋势一、引言喷涂机器人是一种自动化喷涂设备,它可以取代人工进行喷涂作业,提高生产效率,降低成本,同时还可以保证喷涂质量的稳定性和一致性。
目前,喷涂机器人已经广泛应用于汽车、航空航天、建筑等领域。
本文将从关键技术和发展趋势两个方面对喷涂机器人进行研究。
二、关键技术1. 控制系统喷涂机器人的控制系统是整个设备的核心部分。
它需要能够精确控制喷枪的位置、速度和角度等参数,以达到预定的喷涂效果。
目前常用的控制系统有开环控制和闭环控制两种方式。
开环控制相对简单,但容易受到外界干扰;闭环控制则更加精确稳定,但需要增加传感器等硬件设备成本。
2. 喷枪喷枪是喷涂机器人最重要的组成部分之一。
其质量和性能直接影响着整个设备的喷涂效果和稳定性。
目前市场上常见的喷枪有压力式、重力式和吸引式三种类型。
其中,压力式喷枪适用于高粘度涂料,重力式喷枪适用于低粘度涂料,吸引式喷枪则可以同时适用于两种涂料。
3. 喷嘴喷嘴是喷涂机器人中最小的部件之一,但其作用却十分重要。
它可以将涂料均匀地喷洒到被喷物体表面,并且可以控制喷液的流量和角度等参数。
目前市场上常见的喷嘴有圆锥形、扁平形和圆柱形三种类型。
其中,圆锥形和扁平形适用于大面积均匀涂装,圆柱形则适用于小面积局部修补。
4. 传感器传感器是实现闭环控制的关键设备之一。
它可以实时监测被喷物体表面的形状、颜色和光泽度等参数,并将这些信息反馈给控制系统进行调整。
目前市场上常见的传感器有激光扫描仪、视觉传感器和超声波传感器等。
5. 轨迹规划轨迹规划是指确定机器人运动轨迹的过程。
它需要考虑到被喷物体的形状、大小和几何结构等因素,并根据这些因素确定最优的运动路径。
目前常用的轨迹规划算法有直线插补、圆弧插补和样条插补等。
三、发展趋势1. 智能化随着人工智能技术的不断发展,喷涂机器人也将逐渐实现智能化。
未来,喷涂机器人将可以自主感知周围环境,自主规划运动路径,并且可以通过学习算法不断提高自身的工作效率和稳定性。

喷涂机器人在汽车制造中的应用随着汽车产业的快速发展,喷涂技术在汽车制造过程中扮演着至关重要的角色。
传统手工喷涂存在着效率低、一致性差、成本高等诸多问题,而喷涂机器人的应用则有效地解决了这些问题。
喷涂机器人作为一种自动化生产设备,在汽车制造中发挥着越来越重要的作用,本文将从以下几个方面对喷涂机器人在汽车制造中的应用进行深入探讨。
一、喷涂机器人的发展历程1. 早期喷涂机器人的应用情况在早期,汽车制造使用的喷涂机器人主要是单一功能的,具有固定的程序和轨迹,只能完成简单的涂装操作,效率低下。
2. 喷涂机器人的技术革新随着科技的迅速发展,喷涂机器人的技术得到了革新,采用了更智能、更灵活的控制系统和更精准的喷涂设备,使机器人能够适应不同型号的汽车、完成复杂的涂装工艺。
3. 目前喷涂机器人的应用情况目前,喷涂机器人已经成为汽车制造中不可或缺的重要设备,大大提高了汽车生产线的生产效率和产品质量。
二、喷涂机器人的优势1. 完成复杂的喷涂任务喷涂机器人具有灵活的操作性和精密的控制能力,可以完成各种复杂的喷涂任务,包括车身外观、车身防腐等多种涂装工艺。
2. 提高生产效率喷涂机器人的自动化生产能力大大提高了汽车制造的生产效率,减少了人工成本和涂装时间,为汽车制造企业节约了大量的成本。
3. 保证涂装质量喷涂机器人在涂装过程中可以保持稳定的喷涂厚度和均匀的涂装质量,有效避免了人工涂装可能存在的涂装厚度不均匀、漏喷等问题,保证了产品的涂装质量。
4. 节能减排相比传统手工喷涂,喷涂机器人能够更精准地控制喷漆用量,减少废涂和二次喷涂,减少了溶剂使用量、废弃物产生,降低了对环境的影响,符合环保要求。
三、喷涂机器人在汽车制造中的应用1. 车身涂装喷涂机器人在汽车制造中广泛应用于车身的底漆喷涂、面漆喷涂等工艺,可以实现高效、高质的车身涂装。
2. 零部件涂装在汽车制造中,各种零部件如车门、引擎盖、保险杠等也需要进行喷涂处理,喷涂机器人可以根据不同零部件的尺寸和形状进行精准喷涂,保证了零部件的一致性和质量。

喷涂国产机器人的分类、结构、工作原理报告喷涂机器人是一类用于自动喷涂工作的机器人,主要用于工业生产中的涂装工艺。
下面是一个关于喷涂国产机器人的分类、结构和工作原理的报告:一、分类:喷涂国产机器人按照使用环境和工作方式可以分为以下几类:1. 固定喷涂机器人:固定在一个特定位置,用于喷涂大型工件,如汽车车身、船舶等。
2. 移动喷涂机器人:可以在工作区域内自由移动,用于喷涂较大面积的工件,如飞机机翼、建筑外墙等。
3. 协作喷涂机器人:与人工操作员共同完成喷涂工作,能够提高工作效率和质量,减少劳动强度。
二、结构:喷涂国产机器人的结构主要包括机械结构、控制系统和喷涂装置。
1. 机械结构:由机械臂、关节、传感器等组成。
机械臂通常采用多关节结构,可以实现多个自由度的运动,以适应不同的工作场景和姿态要求。
2. 控制系统:包括硬件和软件两部分。
硬件包括电机、传感器、控制器等,用于实时控制机械臂的运动;软件则负责编程和控制算法的设计,以实现喷涂的精确控制。
3. 喷涂装置:包括喷枪、气动系统、喷涂材料供给系统等。
喷枪通过气动系统将喷涂材料喷射到工件表面,实现喷涂的目的。
三、工作原理:喷涂国产机器人的工作原理主要分为以下几个步骤:1. 工件扫描:通过传感器对工件表面进行扫描,获取工件的尺寸和形状信息,以便后续的喷涂操作。
2. 路径规划:根据工件的形状和尺寸信息,通过控制系统计算出机械臂的运动轨迹,以确保喷涂的覆盖面积和均匀度。
3. 喷涂操作:机械臂按照预定的轨迹运动,将喷涂材料从喷枪中喷射到工件表面。
喷涂材料可以是涂料、油漆等,通过气动系统提供压力和喷嘴控制实现喷涂过程。
4. 检测与调整:通过传感器对喷涂质量进行实时检测,如果出现问题(如漏涂、厚度不均等),则通过控制系统对机械臂的运动进行调整,以保证喷涂质量的要求。
在实际应用中,喷涂国产机器人还可以配备视觉系统和智能控制算法,实现更精确的喷涂操作和自适应调整,提高喷涂质量和效率。


机械制造行业替代人工生产方案第1章绪论 (3)1.1 研究背景与意义 (3)1.2 国内外研究现状 (3)1.3 研究内容与目标 (4)第2章机械制造行业概述 (4)2.1 行业发展概况 (4)2.2 行业生产特点 (4)2.3 行业面临的问题与挑战 (5)第3章技术应用分析 (5)3.1 技术概述 (5)3.2 分类及功能 (5)3.2.1 按结构分类 (5)3.2.2 按功能分类 (6)3.2.3 按控制方式分类 (6)3.3 应用领域 (6)第4章替代人工生产方案设计 (7)4.1 方案设计原则 (7)4.1.1 安全性原则 (7)4.1.2 高效性原则 (7)4.1.3 可靠性原则 (7)4.1.4 易用性原则 (7)4.1.5 经济性原则 (7)4.2 选型与配置 (7)4.2.1 类型选择 (7)4.2.2 功能参数 (7)4.2.3 配置 (7)4.2.4 控制系统 (8)4.3 生产工艺流程优化 (8)4.3.1 工艺流程分析 (8)4.3.2 工艺流程改进 (8)4.3.3 系统集成 (8)4.3.4 生产调度与管理 (8)第5章焊接技术应用 (8)5.1 焊接工艺概述 (8)5.2 焊接系统设计 (8)5.3 焊接工艺参数优化 (9)第6章装配技术应用 (9)6.1 装配工艺概述 (9)6.1.1 装配工艺简介 (9)6.1.2 装配工艺流程 (9)6.2 装配系统设计 (10)6.2.2 装配末端执行器设计 (10)6.2.3 装配系统布局 (10)6.3 装配精度控制 (10)6.3.1 视觉系统 (10)6.3.2 传感器技术应用 (10)6.3.3 运动控制 (10)6.3.4 误差补偿技术 (10)第7章搬运与上下料技术应用 (10)7.1 搬运与上下料工艺概述 (10)7.2 搬运与上下料系统设计 (11)7.2.1 系统构成 (11)7.2.2 系统设计原则 (11)7.3 搬运与上下料路径规划 (11)7.3.1 路径规划方法 (11)7.3.2 路径优化 (11)第8章加工技术应用 (12)8.1 加工工艺概述 (12)8.2 加工系统设计 (12)8.2.1 选型 (12)8.2.2 加工设备与工具配置 (12)8.2.3 控制系统设计 (12)8.3 加工精度与效率分析 (12)8.3.1 加工精度分析 (12)8.3.2 加工效率分析 (12)第9章视觉检测技术应用 (13)9.1 视觉检测技术概述 (13)9.1.1 视觉检测技术基本原理 (13)9.1.2 视觉检测技术的发展历程 (13)9.1.3 视觉检测技术在机械制造行业的应用领域 (13)9.2 视觉检测系统设计 (13)9.2.1 系统结构设计 (14)9.2.2 硬件设计 (14)9.2.3 软件设计 (14)9.3 视觉检测算法研究 (14)9.3.1 图像预处理算法 (14)9.3.2 特征提取算法 (14)9.3.3 目标识别算法 (14)第10章系统集成与调试 (14)10.1 系统集成策略 (14)10.1.1 系统集成概述 (14)10.1.2 系统集成步骤 (15)10.1.3 系统集成关键问题 (15)10.2 控制系统设计 (15)10.2.2 控制算法及策略 (15)10.2.3 控制系统软件设计 (15)10.3 系统调试与优化 (15)10.3.1 系统调试方法 (15)10.3.2 系统功能评估 (16)10.3.3 系统优化策略 (16)第1章绪论1.1 研究背景与意义科技的飞速发展,技术在机械制造行业的应用日益广泛。

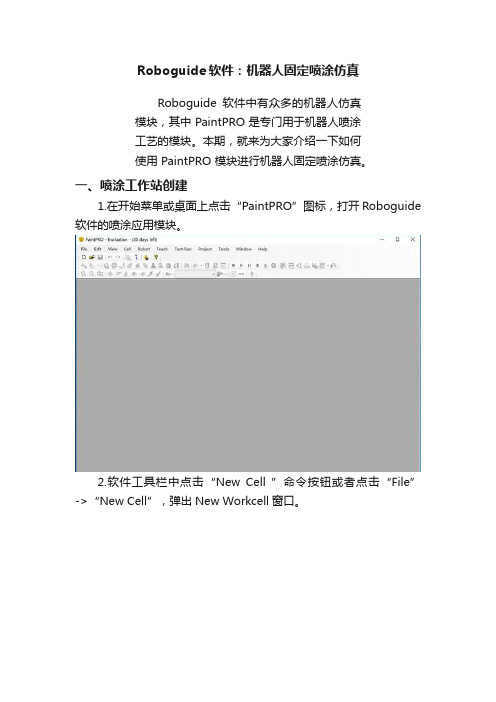
Roboguide软件:机器人固定喷涂仿真Roboguide软件中有众多的机器人仿真模块,其中PaintPRO是专门用于机器人喷涂工艺的模块。
本期,就来为大家介绍一下如何使用PaintPRO模块进行机器人固定喷涂仿真。
一、喷涂工作站创建1.在开始菜单或桌面上点击“PaintPRO”图标,打开Roboguide 软件的喷涂应用模块。
2.软件工具栏中点击“New Cell ”命令按钮或者点击“File” ->“New Cell”,弹出New Workcell窗口。
3.在Workcell Name后设置工作站名称,如PaintPRO1。
Booth 区域下勾选“Build from Scratch”(自定义配置),Style Processing区域下勾选“Stop Sation”(固定喷涂),其他保持默认,点击“OK”按钮。
4.弹出虚拟机器人编辑向导对话框,Step1选择机器人创建方法,勾选“Create a new robot with the default PaintPRO config”,即使用默认的喷涂模块配置创建新机器人,点击“Next”按钮。
5.Step2选择机器人软件版本,这里选择最高版本,即V8.3-R-30iB,点击“Next”按钮。
6.Step3选择机器人系统工艺软件包,这里选择“PaintTool(N.A)(H596)”,点击“Next”按钮。
7.Step4选择机器人模型,这里选择“P-250iB/15(H679)”,点击“Next”按钮。
8.Step5选择机器人外部轴,本项目无外部轴,因此这里保持默认,点击“Next”按钮。
9.Step6选择机器人软件可选项,这里勾选“J567(DCS Pos./Speed check)”,点击“Next”按钮。
10.Step7在此对话框中确认之前所选的配置信息,确认无误后点击“Finish”按钮。
11.此时,弹出虚拟示教器对话框,机器人控制器开始初始化配置,等待初始化配置完成。
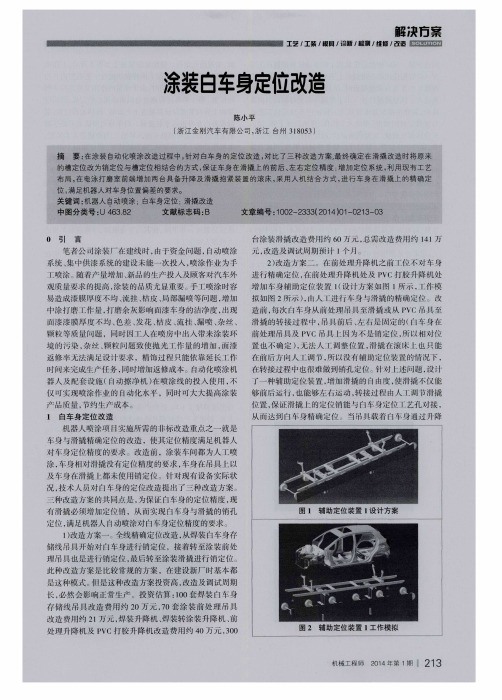
第32卷 第10期 2010-10(上)【147】机器人外轴替代法在自动涂装业的应用The application of external axis con fi guration in robot auto painting industry赵之坚1,苗 宏2,蔡 鹏1,荣海东3ZHAO Zhi-jian 1,MIAO Hong 2,CAI Peng 1,RONG Hai-dong 3(1. 三一电气有限责任公司,北京 102206;2. 哈尔滨工业大学 深圳研究生院,深圳 518055;3. ABB (中国)有限公司,北京 100016)摘 要:本文介绍了一种采用伺服电机及变频器的方式实现机器人机械本体的移动行走和工件本身的回转等动作,以替代给六轴机器人配置外部轴的费用昂贵的实现方式。
这一替代方式在多个企业的自动喷涂系统中获得了应用。
控制系统基于西门子S7-200可编程控制器和WinCC组态软件,上下位通讯采用PROFIBUS-DP,是一个典型的FCS系统。
外部轴配置替代方法在结构分布上更趋于合理,并且易于维护,项目费用上也更经济实用,人机界面上更加友好和易于操作。
关键词:外轴替代法;自动涂装;FCS;WinCC;PROFIBUS-DP中图分类号:TP273 文献标识码:A 文章编号:1009-0134(2010)10(上)-0147-03Doi: 10.3969/j.issn.1009-0134.2010.10(上).470 引言随着科技的发展,近十年喷涂机器人在工业现场已呈现出广泛使用的趋势。
由于使用机器人喷涂均匀性好,重复精确度远远高于人工,因此避免了手工喷涂人员因技术、情绪、体力等因素造成的产品质量缺陷,使工件喷涂质量有了根本性的保障。
由于喷涂作业属于有害作业,采用机器人作业可大大降低工人的劳动强度,提高生产效率,同时由于机器人在喷涂过程中流量、扇面、雾化的大小均可随时调整,可大大减少油漆的损耗,提高油漆的利用率。
机器人系统由机器人机械本体、控制系统、示教器和应用软件等组成。
机器人机械本体采用六轴关节式结构。
控制系统采用奔腾级及更高性能CPU和全数字式信号通讯方式,能够控制机器人机械本体的六个轴,还能扩展两个个外部轴。
工件本身体型较大导致需要机器人机械本体需要实现行走,或是工件本身需要实现回转动作时,机器人厂商推荐的实现方案有给六轴机器人配置外部轴的方式。
但使用外部轴的实施方式在的成本方面不够经济,本文介绍了一种采用伺服电机的方式实现机器人机械本体的移动行走和工件本身的回转等动作,以替代给六轴机器人配置外部轴的实现方式。
这一替代方法在多个企业的自动喷涂系统中获得了应用。
1 系统构成及工作原理本文介绍的喷涂系统通常由喷涂机器人,直线行走装置或工件回转机构和供输漆系统等几部分组成。
系统构成见图1。
图1 系统构成图1.1 喷涂机器人简介选用ABB公司的IRB540型喷漆机器人。
IRB 540是一款面面兼顾、结构精简的机器人,配备独创的专利技术FlexWrist(柔性手腕),十分方便人工编程(点到点、连续路径)。
该机器人能稳定保持出色的涂装质量并防止过喷,减少原料耗用和浪费。
1.2 直线行走装置的驱动系统采用交流伺服系统,驱动器本身带控制,可收稿日期:2009-11-19作者简介:赵之坚(1977 -),男,山西人,中级工程师,本科,研究方向为计算机测试与控制。
【148】 第32卷 第10期2010-10(上)以对移载机构的运动速度和运动距离进行设置,以满足机器人在喷涂时对移载机构的运动要求。
项目实施中实际选用的交流伺服电机技术参数如下:驱动方式 交流伺服电机驱动电机型号 6SM57S-3000(Kollmorgen)最大转速 3000r/min 额定转矩 3Nm 功率 0.9kw 减速比 119行走速度 0.6~6M/min 电机速度范围 180~1800r/min 齿轮轮直径 126mm 电机最大工作转速 3000r/min 行程 6000mm 精度 0.1mm 1.3 总控系统上位机采用工业控制机,其作用主要是监控系统的工作状态,报警信息显示,打印工作报表等。
下位机采用西门子公司的S7-200PLC主要作用是对外围设备、喷房,移动装置,总控台的输入指令信号、喷漆机器人的工作状态信号进行实时处理。
1.4 供输漆系统和喷枪均采用美国GRACO公司的产品。
1.5 工业监视系统通常在自动喷涂段的两侧两端各设1处CCD摄像机,每台摄像机配置室内全方位云台,可变镜头,云台可实现水平方向0-360°转动,垂直方向可实现±60°转动,实现全方位监控。
云台镜头控制器可控制云台机镜头的变化。
1台21”彩色电视监视器可自动切换显示2台摄像机的监视情况。
2 外轴替代法的硬件系统构成2.1 硬件系统总控系统的硬件结构包括以下器件:机器人控制器自带一块直流24V数字式I/O 板,16入/16出;交流伺服电机驱动器配备一块数字式I/O卡,14入/8出;主控制器即PLC的数字输入输出模块的点数配置留有10%—20%余量。
项目实施的难点之一就是三个I/O单元连接方式的拓扑机构。
实际使用中用到了两种方式,一种是以PLC为中心的星形连接方式,一种是PLC、机器人和伺服电机构成的三角形连接方式。
其中星形连接方式 用于绵阳某单位的精密自动喷涂系统中,三角形连接方式用于西安某单位的两套三防机器人自动喷涂系统中。
两种方式均实现了客户的技术要求,但在实现过程中,都具有一定的优点和不足之处。
2.2 软件系统总控系统的软件的实现。
工作站总控制系统的功能:1)协调控制喷漆室设备与自动喷涂设备,形成联锁保护。
2)协调控制行走机构,涂料输送,喷枪开关与机器人动作。
3)实现喷漆室内及控制室内两地控制转换。
4)各种工件程序选择。
5)工作站故障报警与显示。
6)自动生产数据统计及打印。
7)电视监控系统控制。
8)与消防、安全系统信号衔接。
主控监控界面如图2所示。
图2 主监控画面3 自动喷涂项目实现方法3.1 项目各部分联动工作过程说明1)各单元(喷房、外围设备、机器人、回转装置、总控系统)分别上电后;2)总控系统首先检测各子系统的工作状态(如喷房的温度、湿度、压力是否正常,空气的正压和负压、消防系统和机器人系统是否正常),如果一切正常,向总控系统发机器人准备就绪信号,等待工作。
第32卷 第10期 2010-10(上)【149】3)系统操作人员从总控台上设置工作程序号及其它参数,在总控台或从总控柜上向机器人发启动信号。
4)机器人启动后,首先让回转装置以第一段设置的速度运动第一段角度,同时,机器人执行第一段程序,第一段程序喷涂完毕后,回转装置向机器人发第一段位置运动完毕命令。
5)机器人收到此信号后立即向回转装置发下一段程序运动命令,同时,机器人也执行第二段程序,第二段程序喷涂完毕后,回转装置再向机器人发第二段位置运动完毕命令,机器人收到此信号后再立即向回转装置发下一段程序运动命令。
6)这样周而复始的工作,直到一个程序喷涂完为止,这时机器人再向总控发待命信号,等待总控的第二个启动信号,或重新改变程序号后再发启动信号。
3.2 机器人程序示例************************************ 主程序:初始化后,分段调用轨迹程序;**********************************PROC routine1() //机器人运动轨迹主程序 r o u t i n e 10; //机器人回到初始位置 r o u t i n e I N I T ; //机器人初始化 r o u t i n e W A I T ; //机器人延时等待 routineEnableBD1; //喷涂刷子数据1使能 r o u t i n e P A I N T 11; //喷涂轨迹 r o u t i n e O V E R ; //机器人喷涂结束处理 ENDPROC********************************** ** 例行程序:机器人回到初始位置;**********************************PROC routine10() MoveJ p10,v200,z50,tool0; ENDPROC************************************ 喷涂轨迹:机器人实施喷涂动作;**********************************PROC routine11() IF di01EmyStop=1 THEN EXIT; ENDIFIF di08ServoRdy=1 RETURN; Set do03RobPainting;IF di09GunEnable=1 SetBrush 1; PaintL p10,v400,z50,tool0; IF di08ServoRdy=1 RETURN; PaintL p20,v400,z50,tool0; IF di08ServoRdy=1 RETURN; PaintL p30,v400,z50,tool0; IF di08ServoRdy=1 RETURN; PaintL p20,v400,z50,tool0; IF di08ServoRdy=1 RETURN; PaintL p10,v400,z50,tool0; ENDPROC4 结束语这些项目的开发、研制,及调试工作已顺利完成。
经过试生产后该系统已正式投入运行,该系统运行性能稳定,各子系统运行可靠,各项指标均符合设计要求。
工件喷涂后漆膜厚度均匀、一致性好、无桔皮现象、色差均匀、油漆消耗降低了30%,产品一次合格率高。
随着我国工业领域自动化水平的不断提高,喷涂机器人的应用会更加广泛,这将大大提高我国整个制造行业的自动化水平。
参考文献:[1] S7-200技术资料集[Z][2] ABB机器人用户手册[Z].ABB公司.[3] 伺服电机及驱动器技术手册.Kollmorgen公司[2] P a r t s ,M .E f f e c t o f s t e a m i n j e c t i o n i n t o t w o n e a r b y l a y e r s .J o u r n a lOf Petroleum Science and Engineering,2003:117-124.[3] 刘继和,孙素凤.注汽锅炉[M].北京:石油工业出版社,2007:113-122.[4] 宋伯生.PLC编程理论、算法与技巧[M].北京:机械工业出版社,2006:311-325.[5] 杨公源.可编程控制器(PLC)原理与应用[M].北京:电子工业出版社,2004.[6] 陈在平.可编程控制器技术(PLC)系统设计[M].北京:电子工业出版社,2007.[7] 纪春萌.模糊控制在燃煤注汽锅炉控制系统中的应用[D].大连:大连海事大学,2008.【上接第140页】。