第18章 静定结构的位移计算
- 格式:ppt
- 大小:3.49 MB
- 文档页数:70


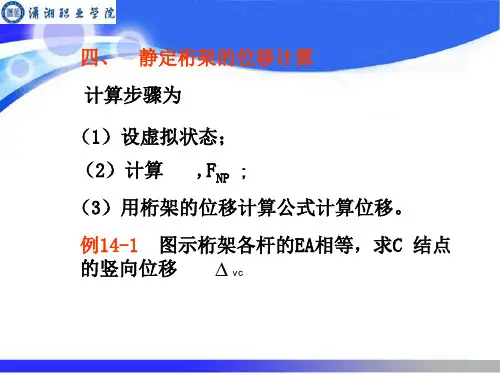
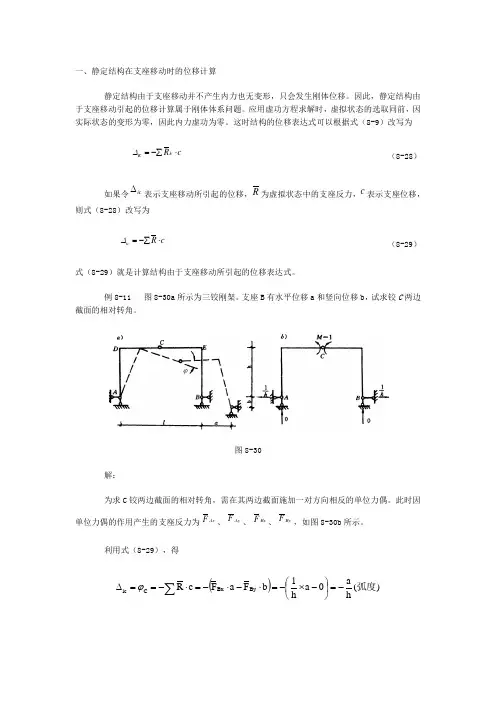
一、静定结构在支座移动时的位移计算静定结构由于支座移动并不产生内力也无变形,只会发生刚体位移。
因此,静定结构由于支座移动引起的位移计算属于刚体体系问题。
应用虚功方程求解时,虚拟状态的选取同前,因实际状态的变形为零,因此内力虚功为零。
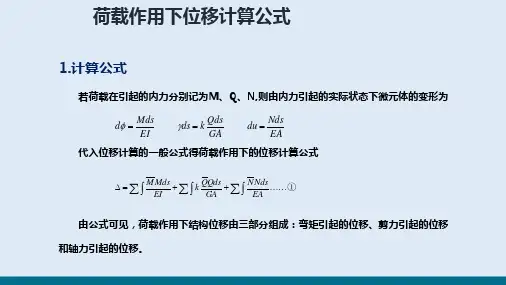
这时结构的位移表达式可以根据式(8-9)改写为(8-28)如果令表示支座移动所引起的位移,为虚拟状态中的支座反力,表示支座位移,则式(8-28)改写为(8-29)式(8-29)就是计算结构由于支座移动所引起的位移表达式。
例8-11 图8-30a 所示为三铰刚架。
支座B 有水平位移a 和竖向位移b ,试求铰C 两边截面的相对转角。
图8-30解:为求C 铰两边截面的相对转角,需在其两边截面施加一对方向相反的单位力偶。
此时因单位力偶的作用产生的支座反力为、、、,如图8-30b 所示。
利用式(8-29),得∑⋅-=c R k K ∆ic ∆R c ∑⋅-=c R ic∆Ax F Ay F Bx F By F ())(h a 0a h 1b F a F c R By Bx C ic 弧度-=⎪⎭⎫⎝⎛-⨯-=⋅-⋅-=⋅-==∆∑ϕ负号表示C处的相对转动的方向与所设的单位力偶的转向相反。
例1 已知简支梁AB跨度为l,右支座B竖直下沉Δ,如图(a)所示。
求梁中点C的竖向位移ΔCV。
解:(1) 在梁中点C处加单位力P=1,如图(b)所示。
(2)计算单位荷载作用下的支座反力:由于A支座无位移,故只需计算B支座反力RB即可。
由对称得B支座反力RB=1/2 (↑)(3) 计算ΔCVΔCV=-∑RC=-(-1/2×Δ)=Δ/2 (↓)例2 图示三铰刚架跨度l=12m,高为h=8m。
已知右支座B发生了竖直沉陷C1=6cm,同时水平移动了C2=4cm (向右),如图(a)所示。
求由此引起的左支座A处的杆端转角φA。
解: (1) 在A处虚设单位力偶m=1,如图(b)所示。
(2) 计算单位荷载作用下的支座反力由于A支座无位移,故只需计算B支座反力即可。


结构力学——静定结构位移计算在工程和建筑领域中,结构力学作为一门重要的学科,主要研究了结构的受力、变形、破坏机理等问题。
其中,静定结构位移计算是结构力学中的一个重要内容。
静定结构所谓静定结构,是指能够通过静力学方程求解出所有节点的受力、反力和变形的结构。
这种结构是不需要知道材料的物理性质和荷载的实际情况的。
在静定结构中,结构的支座固定方式和荷载情况是已知的,因此能够通过解决一组静力学方程,求解出结构中节点的受力和变形。
静定结构位移计算静定结构位移计算是静定结构的重要计算方法之一。
在结构分析中,位移是一种常见的形变量,它反映了物体在载荷作用下发生的形变情况。
在静定结构中,位移是结构的重要参数之一。
它可以通过求解一组线性方程组得到。
具体来说,就是通过应变—位移—节点力关系,将结构各节点位移用系数矩阵和加载节点力表示出来,再通过求解一个线性方程组,就可以得到各节点的位移值。
静定结构位移计算的步骤静定结构位移计算中的步骤包括:1.列出节点位移方程节点位移与内力之间有一定的关系,可以通过位移方程和内力方程来表示。
这些方程可以根据物理实际条件进行建立。
2.确定支座反力支座反力是从位移计算中得到的结果之一。
支座反力是指结构上所有支点所承受的力,在位移计算时是必须考虑的。
3.形成节点位移方程组形成节点位移方程组时,需要考虑杆件的个数、受力条件、材料特性、支座情况等因素。
4.解出节点位移通过解一个线性方程组,我们可以根据已知的节点力和位移方程,求出每个节点的位移值。
静定结构位移计算的应用静定结构位移计算在现代工程设计中具有广泛的应用。
它能够在保证结构稳定的前提下,可以对结构进行优化设计,提高结构的安全性、稳定性、经济性等方面的性能。
除此之外,静定结构位移计算还可以应用于建筑设计、桥梁设计、机械设计、工业生产等领域中。
它可以提供结构设计的数据支持,为结构工程的实施提供参考。
静定结构位移计算是结构力学中的一个重要方向,其计算方法基于静力学方程进行,其特点是简单、可靠和实用。