全站仪后方交会操作过程
- 格式:docx
- 大小:19.25 KB
- 文档页数:3

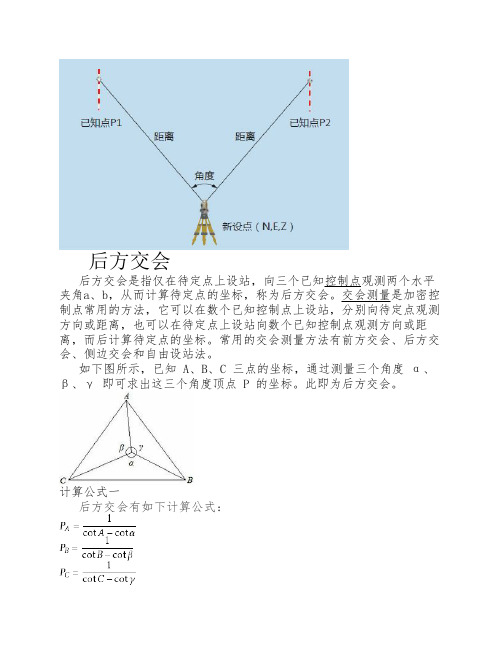
后方交会
后方交会是指仅在待定点上设站,向三个已知控制点观测两个水平夹角a、b,从而计算待定点的坐标,称为后方交会。
交会测量是加密控制点常用的方法,它可以在数个已知控制点上设站,分别向待定点观测方向或距离,也可以在待定点上设站向数个已知控制点观测方向或距离,而后计算待定点的坐标。
常用的交会测量方法有前方交会、后方交会、侧边交会和自由设站法。
如下图所示,已知 A、B、C 三点的坐标,通过测量三个角度α、β、γ 即可求出这三个角度顶点 P 的坐标。
此即为后方交会。
计算公式一
后方交会有如下计算公式:
实际测量时一般是使用全站仪测量三个方向角 PA、PB、PC。
根据这三个方向角计算如下六个变量,然后再代入上面的公式计算点P 的坐标。
计算公式二
全站仪测量三个方向角 PA、PB、PC。
根据这三个方向角计算点P坐标的公式如下:
危险圆
点 P 在三角形 ABC 的外接圆上时,α、β、γ 将保持不变。
如此一来,点 P 的坐标将有无穷个——外接圆上的任意一点均可以是点 P。
此时,使用计算公式计算点 P 坐标时,可能会因为除以零而得到无效解。
点 P 靠近外接圆时,很小的观测误差都会引起点 P 位置的较大偏差。
因此,称三角形 ABC 的外接圆为危险圆。
后方交会时,应避免点 P 离危险圆很近。
精度假定水平方位角的观测中误差为
,则有:
点P的定位精度为:
定向精度为:
上面两个公式中的
按下面的公式计算
注意:当点P在危险圆上时
将等于零,于是定位精度与定向精度将为无穷大。

1、角度测量(angle observation)(1)功能:可进行水平角、竖直角的测量。
(2)方法:与经纬仪相同,若要测出水平角∠AOB ,则:1)当精度要求不高时:瞄准A 点——置零(0 SET )——瞄准B 点,记下水平度盘HR 的大小。
2)当精度要求高时:——可用测回法(method of observation set )。
操作步骤同用经纬仪操作一样,只是配置度盘时,按“置盘”(H SET )。
2、距离测量(distance measurement )PSM 、PPM 的设置——测距、测坐标、放样前。
1)棱镜常数(PSM )的设置。
一般:PRISM=0 (原配棱镜),-30mm (国产棱镜)2)大气改正数(PPM )(乘常数)的设置。
输入测量时的气温(TEMP )、气压(PRESS ),或经计算后,输入PPM 的值。
(1)功能:可测量平距HD 、高差VD 和斜距SD (全站仪镜点至棱镜镜点间高差及斜距)(2)方法:照准棱镜点,按“测量”(MEAS )。
3、坐标测量(coordinate measurement )(1)功能:可测量目标点的三维坐标(X ,Y ,H )。
(2)测量原理任意架仪器,先设置仪器高为0,棱镜高是多少就是多少,棱镜拿去直接放在已知点上测高差,测得的高差为棱镜头到仪器视线的高差,当然,有正有负了,然后拿出计算器用已知点加上棱镜高,再加上或减去(因为有正有负)测得的高差就是仪器的视线高啊,因为仪器高为0,所以这个数字就是你的测站点高程,进测站点把它改成这个数字就行了,改完测站点了一般情况下都要打一下已知点复核一下。
若输入:方位角,测站坐标(,);测得:水平角和平距。
则有:方位角:坐标:若输入:测站S 高程,测得:仪器高i ,棱镜高v ,平距,竖直角,则有:高程:(3)方法:输入测站S (X ,Y ,H ),仪器高i ,棱镜高v ——瞄准后视点B ,将水平度盘读数设置为——瞄准目标棱镜点T ,按“测量”,即可显示点T 的三维坐标。
宾得R-202NE系列全站仪(Pentax Total Station)培训说明一、仪器的取放,保养仪器要轻拿轻放,专人保管。
保持仪器的整洁。
二、如何进行高差、距离的测量开机→整平仪器(气泡,对中的调整)→按ESC(进入模式A)F1测距:测量功能(按一次为普通测量,快速按二次为连续测量)F2目标:更改目标类型(二种模式可选,棱镜P-30,免棱镜N 0)F3置零:快速按两次即可将水平角置零F4显示:按此键可以改变显示字体的大小F5模式:按此键可在A,B模式中转换三、如何测坐标开机→整平仪器(气泡,对中的调整)→按ESC(进入模式A)→F5模式(进入B模式)→F1功能→F2测量→1.直角坐标数据(测量方法选择)ENT→仪器点设定PN:点名(或点号),X,Y,Z坐标(其中Z为高程,可不输入),IH:仪器高,PC:编码(可不输入),一切都输入完毕且正确后,按F5接受→F5后视点(进入仪器点水平角设定),同样,输入后视点各项参数后→按F5接受→F5确定(在瞄准后视点后,按F5确定)→进入坐标测量界面F1测距:测量功能,F2存储:存储坐标数据,F3测量存储:直接测量数据并存在仪器里,F4修订:可以更改点名(号),棱镜高PH,编码PC等。
四、如何进行悬高测量开机→整平仪器(气泡,对中的调整)→按ESC(进入模式A)→F5模式(进入B模式)→F1功能→F5页替换→F2计算→4.悬高测量ENT(进入悬高测量界面)输入好棱镜高PH,瞄准基准点,按F1测距→按ENT(进入悬高状态)我们只需转到需要的位置,即可得到该点的高度。
五、如何放样开机→整平仪器(气泡,对中的调整)→按ESC(进入模式A)→F5模式(进入B模式)→F1功能→F5页替换→F1放样→1.放样(方样方法选定,按ENT)→仪器点设定(输入各项参数)→F5接受→仪器点水平角设定→后视点→后视点设定→照准后视点后,按F5确定→放样坐标设定(正确输入X,Y,PH后,按F5接受)A.从内存调出要放样的坐标(可以搜索点号找到点坐标)B.可以手工输入要放样点的坐标注意:PN(点号);PH(棱镜高);D H.angle(水平角);D V.angle(垂直角);D H.dist(水平距离);Dx、Dy、Dz(在x、y、z方向上的差值),这些信息可以在同一屏幕下显示,当然你也可以选择多屏显示。


三鼎STS-722全站仪操作规程1、打开下激光方法:本系列全站仪为开机自动打开下激光,如果整平对中过程完成,请进入“☆”键,进入“补偿”功能,点“退出”即可,要再次打开下激光,重新进入“补偿”功能即可。
2、功能按键介绍:IM ——字母/数字切换ESC ——退出键MENU ——菜单键ENT ——确定键BS ——删除键,删除光标前的字符PAGE ——翻页键,凡是屏幕右上角有“1/2”或“1/3”,表示有几页内容可查看☆——常用设置键,包括新建作业、EDM( 设置棱镜、无棱镜目标类型、修改棱镜常数)、补偿功能、指向功能3、快捷键介绍:除了数字“6”,其余每一个数字代表一种快捷功能,在“基本测量”界面下使用快捷功能有效。
“-”:直接进入放样界面;“.”:直接测距或测坐标功能;“0”:水平角置零或设角;“1”:进入后方交会功能;“2”:进入悬高测量功能;“3”:进入对边测量功能;“4”:进入面积测量功能;“5”:进入道路设计和放样;“7”:进入快速设站功能;“8”:进入快速定向后视功能;“9”:进入快速坐标采点功能。
4、设置作业、测站、后视操作步骤:(1)设置作业:先进入“☆”键,新建“作业”,(按F4),输入作业名称,如“20140101”,点“确定”(按F4),作业设置成功。
(2)在“基本测量”界面,(按“7”),进入“测站”,输入点名、仪器高、测站坐标NO、E0、ZO,点“保存”(按F4),测站成功。
(3)在“基本测量”界面,(按“8”),进入“定向”,选择“坐标定向”(按F2), 输入点名、棱镜高、后视坐标NBS、EBS、ZBS,点“保存”(按F4),出现“照准后视点”提示,此时瞄准后视点,如需复测后视坐标,点“检查”(按F1),查看结果判断是否正确。
如果不需复测,点“确定”(按F4),后视定向成功。
测点或转点(测坐标)操作步骤:(4)在“基本测量”界面,(按“9”),进入“数据采集”,输入被测点点名、棱镜高,瞄准棱镜,点“测存”(按F1),翻页至3/3( 按PAGE ),查看被测点坐标。


南方测绘全站仪测量操作步骤(NTS-312B)一,测站点测量法(精准测量,测距不宜大于350米):1,将仪器调平后按开机键出现最初界面(测量、模式、S/A、P1↓),然后按功能键(M)找到“测量程序”,按测量程序相对应的键F2键进入测量程序选择内容。
2,使用方位键选择“坐标放样”后按相应的F2键进入坐标放样系统(会出现“选择一个文件”坐标库存,当无库存坐标时可以按ENT键跳过)。
进行建站,选择“输入测站点”按F1输入点名后进入坐标编辑界面(可放弃点名编辑直接按“坐标”进入坐标编辑界面)。
然后对应相应的N、E、Z将X、Y、Z 数据输入进去(当未测量高程时Z可以为0.000)其中每输入一排相应数据完后可以按方位键跳至下一行(仪器高,目标高默认可为0.000),数据输入完毕后按ENT键回到“坐标放样”选择界面;再次使用方位键选择“输入后视点”后按F2键进入,然后选择“坐标”F4键进入坐标数据编辑界面,输入相应坐标,完成后按ENT键,出现“照准后视点”、“是、否”照准;将仪器镜头内十字丝线中心照准后视棱镜中心(棱镜需事前调置好)后锁定照准方位,照准完毕后按“是”(F4键)即整个测站点设置完毕。
3,坐标放样步骤:测站点设置完毕后将自动回到“坐标放样”选择界面。
按F3键进入“输入放样点”(点名可编辑也可不编辑,直接按F4“坐标”进入坐标编辑界面),对相应的N、E、Z输入相应的X、Y、Z坐标后按ENT键确定所编辑的坐标,(当无高程要求时镜高可为默认值,然后继续按ENT 键出现“放样参数计算”再按F4键“继续”进入放样定位)。
最后将角度dHR 调置为00°00′00″后即可放样。
当棱镜设置好放样位置后仪器应照准棱镜镜头中心锁定水平角度方位,再按“距离”(F2键)进行测量。
当测量结果数据显示时,可调整棱镜远近(dH为正数时即相应的棱镜应靠近仪器,dH为负数时则棱镜应远离仪器),直到将dH的测距为0.000m即可完成该点坐标放样。

介绍一种三点后方交会和双点后方交会的解算方法题:三点后方交会和双点后方交会的解算方法引言:在地理测量中,后方交会是一种用来确定点的坐标位置的常用方法。
三点后方交会和双点后方交会都是常用的后方交会方法。
本文将一步一步介绍这两种解算方法的原理和步骤。
一、三点后方交会的解算方法:三点后方交会是根据三个控制点的坐标,结合各点到待求点的观测距离,推算待求点坐标的方法。
以下是三点后方交会的解算步骤:步骤一:采集和计算已知点坐标首先,需要在测区内选择三个控制点,这些点必须有已知坐标。
利用测量仪器(如全站仪或GPS测量仪)进行测量,获取控制点的坐标,并计算它们之间的观测距离。
步骤二:量测待求点到控制点的距离选择一个待求点,并使用同样的测量仪器测量其到三个控制点的距离。
确保观测到的距离是水平距离,并使用适当的纠正方法纠正测距仪的仪器常数和大气折射误差。
步骤三:计算观测距离和坐标增量比例利用观测距离和控制点的坐标差(已知坐标减去待求点坐标),计算待求点的坐标增量比例。
步骤四:推算待求点的坐标根据控制点的坐标和计算得到的坐标增量比例,推算待求点的坐标。
通常,可以使用简单的代数公式或数值解算方法(如迭代法)来计算待求点的X、Y坐标。
步骤五:验证和调整坐标根据计算得到的坐标,重新测量待求点到控制点的距离,并与之前的观测距离进行比较。
如果有较大的偏差,可能需要重新检查测量数据或进行坐标调整。
二、双点后方交会的解算方法:双点后方交会是根据两个控制点的坐标,以及它们到待求点的观测距离,推算待求点坐标的方法。
以下是双点后方交会的解算步骤:步骤一:采集和计算已知点坐标跟三点后方交会一样,首先需要在测区内选择两个控制点,测量其坐标,并计算它们之间的观测距离。
步骤二:量测待求点到控制点的距离选择一个待求点,并利用测量仪器测量其到两个控制点的距离,同样需要进行距离纠正。
步骤三:计算观测距离和坐标增量比例利用观测距离和控制点的坐标差,计算待求点的坐标增量比例。

全站仪后方交会的实用教程
1 在最下面一排先找到后交的按键,点击一下
2 输入点号1的已知点坐标
A 输入完以后,全部再检查一遍
B 找到确定按键,点击一下
3 输入点号2的已知点坐标
A 输入完以后,全部再检查一遍
B 找到测量按键,点击一下
4 照准第1点
A 先找到测距的按键,点击一下
B 输入目标高(就是棱镜高)
C 找到是按键,点击一下
5 照准第2点
A 先找到测距的按键,点击一下
B 输入目标高(就是棱镜高)
C 找到是按键,点击一下
6 上述出来的结果就是仪器架设点的坐标
A 点击确定按键
B 照准第2个点,点击是按键
C 此时已经建站完毕,可以放样了
7 为了精度要求,可以照准已知点复核一下,看是否正确。


后方交会法原理在测量领域中,后方交会法是一种常用的方法,它可以用于确定已知控制点的位置以及未知点的坐标。
后方交会法是基于三角形相似原理的测量技术,它可以通过对已知控制点的距离和方位角度的测量,来计算出未知点的坐标。
本文将详细介绍后方交会法的原理和应用。
一、后方交会法原理后方交会法是基于三角形相似原理的测量技术,它是通过已知控制点的位置和方位角度的测量,来计算未知点的坐标。
具体来说,后方交会法的原理包括以下几个步骤:1.测量控制点的位置和方位角度在后方交会法中,需要测量已知控制点的位置和方位角度。
控制点是已知坐标的点,通常是在测量区域的边界或者是在地面上的显著点。
测量控制点位置的方法有很多种,包括全站仪、GPS等。
方位角度是指测量点相对于一个已知方向的角度,可以通过全站仪或者经纬仪等测量仪器来测量。
2.测量未知点与控制点之间的距离和角度在已知控制点的基础上,需要测量未知点与控制点之间的距离和角度。
距离可以通过测距仪等仪器来测量,角度可以通过全站仪等仪器来测量。
需要注意的是,测量时需要保证控制点与未知点之间的视线畅通,以确保测量的准确性。
3.计算未知点的坐标通过已知控制点的坐标、方位角度和未知点与控制点之间的距离和角度,可以利用三角形相似原理来计算未知点的坐标。
具体计算公式如下:X = X0 + L * sin(A + α)Y = Y0 + L * cos(A + α)其中,X0和Y0是已知控制点的坐标,A是控制点与未知点之间的方位角度,α是未知点与控制点之间的角度,L是未知点与控制点之间的距离。
通过以上公式,可以计算出未知点的坐标。
二、后方交会法的应用后方交会法在测量领域中应用广泛,可以用于确定已知控制点的位置以及未知点的坐标。
以下是后方交会法的一些应用场景:1.地形测量在地形测量中,后方交会法可以用于确定山顶、山脚、河流等地形特征点的坐标。
通过测量已知控制点的位置和方位角度,以及未知点与控制点之间的距离和角度,可以计算出未知点的坐标,从而确定地形特征点的位置。
后方交会
后方交会是指仅在待定点上设站,向三个已知控制点观测两个水平夹角a、b,从而计算待定点的坐标,称为后方交会。
交会测量是加密控制点常用的方法,它可以在数个已知控制点上设站,分别向待定点观测方向或距离,也可以在待定点上设站向数个已知控制点观测方向或距离,而后计算待定点的坐标。
常用的交会测量方法有前方交会、后方交会、侧边交会和自由设站法。
如下图所示,已知 A、B、C 三点的坐标,通过测量三个角度 α、β、γ 即可求出这三个角度顶点 P 的坐标。
此即为后方交会。
计算公式一
后方交会有如下计算公式:
实际测量时一般是使用全站仪测量三个方向角 PA、PB、PC。
根据这三个方向角计算如下六个变量,然后再代入上面的公式计算点P的坐标。
计算公式二
全站仪测量三个方向角 PA、PB、PC。
根据这三个方向角计算点P坐标的公式如下:
危险圆
点 P 在三角形 ABC 的外接圆上时,α、β、γ 将保持不变。
如此一来,点 P 的坐标将有无穷个——外接圆上的任意一点均可以是点P。
此时,使用计算公式计算点 P 坐标时,可能会因为除以零而得到无效解。
点 P 靠近外接圆时,很小的观测误差都会引起点 P 位置的较大偏差。
因此,称三角形 ABC 的外接圆为危险圆。
后方交会时,应避免点P 离危险圆很近。
精度假定水平方位角的观测中误差为
,则有:
点P的定位精度为:
定向精度为:
上面两个公式中的
按下面的公式计算
注意:当点P在危险圆上时
将等于零,于是定位精度与定向精度将为无穷大。


前方交会法:在己知的两个(或两个以上)己知点(A,B)上架站通过测量α角和β角,计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(A,B):后方交会法:在待测点(P)上架站,通过使用三个己知点(A,B,C)及α角和β角计算待测点(P)坐标的方法。
如下图所示,红色字母代表的站点为架站点(P):一、引言在工程测量中,内业资料计算占有很重要的比重,内业资料计算的准确无误与速度直接决定了测量工作是否能够快速、顺利地完成。
而内业资料的计算方法及其所需达到的精度,则又直接取决于外业所用仪器及具体的放样目标和内业计算所用到的办公软件和计算方法。
计算机辅助设计(Computer Aid Design 简写CAD,常称AutoCAD)是20世纪80年代初发展起来的一门新兴技术型应用软件。
如今在各个领域均得到了普遍的应用。
它大大提高了工程技术人员的工作效率。
AutoCAD配合AutoLisp语言,还可以编制一些常用的计算程序,得到计算结果。
AutoCAD的特性提供了测量内业资料计算的另外一种全新直观明了的图形计算方法。
结合我们现正使用的徕卡全站仪的情况,其可以很方便地进行三维坐标的测量,通过AutoCAD的内业计算,①、在放样的过程中,可以用编程计算器结合全站仪,非常方便地、快速地进行作业;②、运用AutoCAD进行计算结果的验证;③、随着全站仪的推广和普及,极坐标的放样越来越成为众多放样方法中备受测量人员青睐的一种,而坐标计算又是极坐标放样中的重点和难点,由于一般的红线放样,工程放样中的元素多为点、直线(段)、圆(弧)等,故可以充分利用AutoCAD的设定坐标系、绘图和取点的功能,以及结合我们外业所用计算器的功能,从而大大减轻我们外业的工作强度及内业的工作量。
以下以冶勒电站厂区枢纽工程的一些实例来说明三者在工程测量中的应用。
二、测区概况冶勒电站厂址位于石棉县李子坪乡南桠村,距坝址11KM,距石棉县城40KM。
全站仪放样,作为施工过程中一项重要环节,对技术员已上升为必须擅长的仪器操作内容。
全站仪建站一般有两种方法,即极坐标法建站和后方交会法建站。
现以尼康全站仪为例,讲述全站仪后方交会法建站、放样全过程。
(其他品牌全站仪可参考进行)
一、建站
1.将仪器架于两已知点均可通视,且可完全看到放样目标点位置的高处。
尽量保证视线夹角在60度左右,仪器架设高度适中,三脚架腿踩实,不可出现放样过程中架腿松动现象。
(注意:整个放样过程中仪器附近不应有人来回走动,且放样人员应尽量站在一点不动,减少因人员走动导致仪器震动偏移。
)
2.固定仪器,上下松动架腿大致调整圆水准器气泡基本居中,按下电源键开机,上下左右转动一下,按下“0”键,进入精平模式。
将水准管放于平行于两螺旋连线方向,关注屏幕上数值,“”过大,便同时向内或向外转动平行方向两螺旋至数值符合要求(一般数值处于5"以内即可);“”过大,便左转或右转垂直方向螺旋至数值符合要求。
旋转60度,检查,若仍有些许偏差,再按上述调整。
再旋转60度继续检查至完成。
3.按下“确定”键记录,按“建站”键进入建站模式,选择“后方交会法”按“确定”。
①若全站仪内已有建站点坐标,可在“PT”栏输入点名(“MODE”键可切换数字与字母),按“确定”键自动跳出坐标,再输入棱镜高(本项目为1.35m和1.2m两种);②若全站仪内无建站点坐标,于“PT”处按“确定”键进入坐标输入界面,XYZ
输完后,按“确定”回到界面,再输入仪器高。
CD数值暂时不输,按“确定”跳过进而记录,进入瞄准后视点1界面,视线内横竖丝卡住棱镜头“横竖尖头”(一般要求:竖向从镜杆底部瞄起,再翻转上去;横向以卡住两边尖为准),瞄准后,点击“测量1”(一般仪器内部设置“测量1”为棱镜模式且双频,“测量2”为免棱镜模式且单频,具体设置可内部调节变动)测量,待响两声后,在不转动仪器前按“确定”键记录,重复“PT”输入点坐标和棱镜高进行后视点2的瞄准,按“测量1”测量(若发现测量时后视瞄准有移动,再瞄准再按“测量1”测量)。
4.确定无误后,按“确定”键记录,自动开始计算建站误差,一般要求建站误差在5mm以内。
(考虑仪器自身状态和其他情况,计算出结果有几种不正常情况:①建站误差过大,处理办法为按一次“ESC 键”返回测量后视点2,再次瞄准,测量,再计算,若还是很大,重新建站;②出现“输入第三个点”,处理办法为检查输入点坐标是否输入有误,确定无误,再次测量,若不行,重新建站)
建站误差符合要求后,按“确定”键记录,重新输入点名,其他可按“确定”或“”键跳过,最后“确定”键完成建站。
二、放样
点击“放样”键,按“确定”或“”键跳过界面,至下一个坐标输入界面,输入坐标,瞄准,“测量1”测量,按指示告知架镜人员左右前后移动至定点位置,通知定点。
一次“ESC”键返回,再按“确定”或“”键跳过界面,进入下
一点坐标输入界面,可按左右键在已有坐标上更改部分数字,再按“确定”键进入下一点放样,直至完成全部点放样。
(放样过程中,应时刻关注水准气泡偏差,若偏差过大,可适当小范围调节至符合要求;每放一个或几个点,扶镜人员应根据图纸设计,查看放样点之间及与模板的偏位偏差,及时获知并调整)。