牛头刨床机械原理课程设计8点和5点
- 格式:doc
- 大小:653.50 KB
- 文档页数:17

机械原理课程设计——牛头刨床(1)待续2008-11-21 02:13目录一、概述§1.1、课程设计的题目---------------------------------------2§1.2.、课程设计的任务和目的-----------------------------2§1.3、课程设计的要求---------------------------------------3§1.4、课程设计的数据---------------------------------------3二、运动分析及程序§2.1、拆分杆组------------------------------------------------4§2.2、方案分析------------------------------------------------4§2.3、程序编写过程------------------------------------------5§2.4、程序说明------------------------------------------------6§2.5、C语言编程及结果------------------------------------6§2.6、位移,速度,加速度图------------------------------10三、各运动方案的分析与评价§3.1 方案一的运动分析和评价--------------------------12§3.2 方案二的运动分析和评价--------------------------13§3.3 方案三的运动分析和评价--------------------------15§3.4 方案四的运动分析和评价--------------------------16四、小结--------------------------------------- 19五、参考文献---------------------------------20一、概述§1.1.课程设计的题目此次课程设计的题目是:牛头刨床的主传动结构的设计.§1.2.课程设计的任务和目的1)任务:1 牛头刨床的机构选型、运动方案的确定;2 导杆机构进行运动分析;3 导杆机构进行动态静力分析;根据要求发挥自己的创新能力,设计4到5种牛头刨床的主传动机构,使其可以满足牛头刨床的传动需要。

广西工学院机械原理课程设计说明书设计题目牛头刨床系别机械工程系专业班级学生姓名学号指导教师日期 6.17目录一、概述1、课程设计的题目2.、课程设计的任务和目的3、课程设计的要求4、课程设计的数据二、机构简介与设计数据三.课程设计的内容和步骤§2.1、拆分杆组§2.2、方案分析§2.3、程序编写过程§2.4、程序说明§2.5、C语言编程及结果§2.6、位移,速度,加速度图三、小结四、参考文献一、概述1.课程设计的题目此次课程设计的题目是:牛头刨床的主传动结构的设计.2.课程设计的任务和目的1)任务:1 牛头刨床的机构选型、运动方案的确定;2 导杆机构进行运动分析;3 导杆机构进行动态静力分析;4.飞轮设计;5.凸轮机构设计。
2)目的:机械原理课程设计是培养学生掌握机械系统运动方案设计能力的技术基础课程,它是机械原理课程学习过程中的一个重要实践环节。
其目的是以机械原理课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析,计算机辅助设计、绘图以及查阅和使用文献的综合能力。
.3.课程设计的要求牛头刨床的主传动的从动机构是刨头,在设计主传动机构时,要满足所设计的机构要能使牛头刨床正常的运转,同时设计的主传动机构的行程要有急回运动的特性,以及很好的动力特性。
尽量是设计的结构简单,实用,能很好的实现传动功能。
二.机构简介与设计数据1,机构简介牛头刨床是一种用于平面切削加工的机床,如图4-1。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
5点牛头刨床课程设计一、课程目标知识目标:1. 学生能理解5点牛头刨床的基本结构、工作原理及其在机械加工中的应用;2. 学生能掌握5点牛头刨床的操作步骤、调整方法及相关安全技术规范;3. 学生能描述5点牛头刨床加工过程中常见的故障及其原因。
技能目标:1. 学生能独立操作5点牛头刨床进行简单零件的加工;2. 学生能根据加工要求,合理选择和调整5点牛头刨床的切削参数;3. 学生能分析并解决5点牛头刨床加工过程中出现的问题。
情感态度价值观目标:1. 培养学生热爱机械加工专业,增强职业责任感;2. 培养学生严谨、细致的工作态度,提高安全意识;3. 培养学生团队协作精神,提升沟通与交流能力。
课程性质:本课程为机械加工专业核心课程,以实践操作为主,理论教学为辅。
学生特点:学生为中职二年级,具有一定的机械加工基础知识和技能。
教学要求:注重理论与实践相结合,强化操作技能训练,提高学生的实际操作能力。
通过本课程的学习,使学生能够达到课程目标所要求的具体学习成果,为今后的工作打下坚实基础。
二、教学内容1. 5点牛头刨床的基本结构:包括床身、刀架、工作台、进给系统、冷却系统等部件的结构与功能;2. 5点牛头刨床的工作原理:讲解切削加工过程中各部件的协同作用,阐述加工原理;3. 5点牛头刨床操作步骤:详细介绍开机、关机、调整、加工等操作流程;4. 切削参数选择与调整:教授如何根据工件材料、加工要求等选择合适的切削速度、进给量等参数;5. 常见故障及其原因:分析加工过程中可能出现的故障现象,探讨其原因及解决办法;6. 安全技术规范:强调操作过程中的安全注意事项,提高学生的安全意识;7. 实践操作:安排学生进行5点牛头刨床的实操训练,巩固所学知识。
教学内容依据教材相关章节进行组织,教学进度安排如下:1. 前2课时:学习5点牛头刨床的基本结构和工作原理;2. 第3-4课时:学习操作步骤、切削参数选择与调整;3. 第5课时:分析常见故障及其原因,强调安全技术规范;4. 第6-8课时:进行实践操作,巩固所学知识。
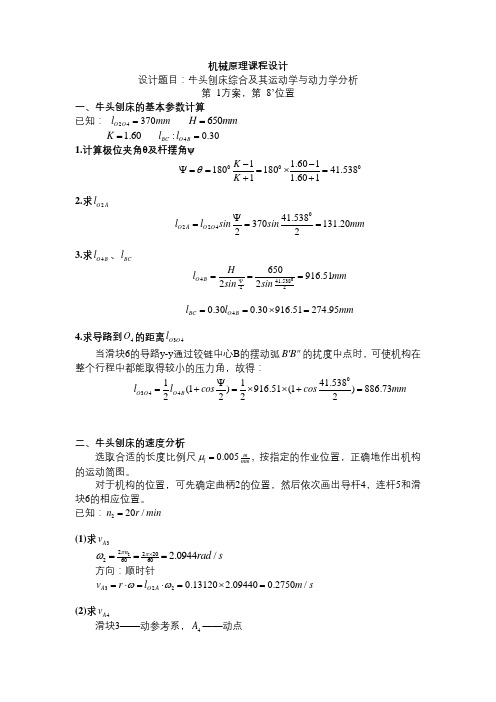
机械原理课程设计设计题目:牛头刨床综合及其运动学与动力学分析第 1方案,第 8’位置一、牛头刨床的基本参数计算已知: 24370O O l mm = 650H mm = 160K =. 4030BC O B l l :=. 1.计算极位夹角θ及杆摆角ψ000116011801804153811601K K θ-.-ψ===⨯=.+.+2.求2O A l224415383701312022O AO O l l sin sin mm ψ.===.3.求4O B l 、BC l441538226509165122O B H l mm sin sin ψ.===.40300309165127495BC O B l l mm =.=.⨯.=.4.求导路到4O 的距离34O O l当滑块6的导路y-y 通过铰链中心B 的摆动弧·BB"'的扰度中点时,可使机构在整个行程中都能取得较小的压力角,故得:3441141538(1)91651(1)886732222O O O B l l cos cos mm ψ.=+=⨯.⨯+=.二、牛头刨床的速度分析选取合适的长度比例尺0005ml mm μ=., 按指定的作业位置,正确地作出机构的运动简图。
对于机构的位置,可先确定曲柄2的位置,然后依次画出导杆4,连杆5和滑块6的相应位置。
已知:220n r min =/(1)求3A v222202606020944n rad s ππω⨯===./ 方向:顺时针32201312020944002750A O A v r l m s ωω=⋅=⋅=.⨯.=./(2)求4A v滑块3——动参考系,4A ——动点4A V u u u u u u r = 3A V u u u u u u r + 43A A V u u u u u u u u u u r方向: ⊥4O A ⊥2O A //4O A 大小: ? 22O A l ω ?选取速度比例尺0005m sv mm μ/=.,作速度图34pa a 进而可得4A v 的大小为44000500A v v pa μ=⋅=.⨯=4ω的大小为4440345960A O A vl ω.=== 43A A v 的大小为4334000555002750A A v v a a m s μ=⋅=.⨯.=./方向:34a a →(3)求B 的速度影像b 及B v由影像原理知,在速度图上,b 点应位于4pa 的延长线上且4491654346000O BO Al l pb pa ..==⨯= 000500B v v pb μ=⋅=.⨯=(4)求C vB ——基点,C ——动点C V u u u u r = B V u u u u r + CB V u u u u u u r方向: 水平 ⊥4O B ⊥BC 大小: ? 44O B l ω ?根据上述方程,继续在速度图34pa a 上作出C 点的速度影像c 进而可得C v 的大小为 000500C v v pc μ=⋅=.⨯= CB v 的大小为000500CB v v bc μ=⋅=.⨯= 5ω的大小为050274950CBBC v l ω.===(5)求4S v由影像原理知,在速度图上,4s 点位于pb 的中点 44000500S v v ps μ=⋅=.⨯=(6)速度综合302750A v m s =./ 40A v = 4302750A A v m s =./ 0B v = 0C v = 0CB v = 40S v =220944rad s ω=./ (顺时针) 40ω= 50ω=三、牛头刨床的加速度分析 (1)求4A a4A a u u u u u u r= 4n A a u u u u u u r+ 4t A a u u u u u u r = 3A a u u u u u u r+ 43k A A a u u u u u u u u u u r+ 43rA A a u u u u u u u u u u r方向: 4A O → 4O A ⊥ 2A O → 4O A ⊥ //4O A大小: 244O A l ω ? 222O A l ω 4432A A v ω ? 其中:4n A a 的大小为2244400345960n A AO a l ω=⋅=⨯.= 3A a 的大小为222322209440131200576A O A a l m s ω=⋅=.⨯.=./ 43k A A a 的大小为43443220027500k A A A A a v ω==⨯⨯.=选取加速度比例尺2002m s a mm μ/=.,作加速度图34πa a '' 进而可得4t A a 的大小为24440022880576t A a a a"m s a μ=⋅=.⨯.=./' 方向:44a"a →' 4α的大小为442057640345961665tA AO a l rad s α..===./ 方向:逆时针(2)求B 的加速度影像b’及B a由影像原理知,在加速度图上,b’点应位于4a π'的延长线上,且44916543460288762O BO Al l b mm a ππ..'==⨯.=.' 2π0027621524B a a b m s μ'=⋅=.⨯.=./ 方向:πb '→(3)求C aC a u u u u r= B a u u u u r+ n CB a u u u u u u r + t CBa u u u u u u r方向: 水平 √ C B → ⊥BC 大小: ? √ 25BC l ω ?其中:nCB a 的大小为22500274950nCBBC a l ω=⋅=⨯.= 根据上述方程,继续在加速度图34a a π''上求得C 点的加速度影像c’。


机械原理大作业——牛头刨床牛头刨床是一种常见的机械设备,广泛应用于木工加工行业。
它主要用于对木材进行刨削,以获得平整的表面和精确的尺寸。
本文将详细介绍牛头刨床的工作原理、结构组成、操作步骤以及相关注意事项。
一、工作原理牛头刨床的工作原理基于刨床刀具的旋转和木材的移动。
刨床刀具通常由多个刀片组成,固定在刨床刀轴上。
当刨床启动时,刀轴开始旋转,刀片切入木材表面,并将其刨削。
同时,木材被放置在刨床工作台上,工作台会通过传动装置使木材沿水平方向移动,从而实现对木材的刨削。
二、结构组成牛头刨床主要由以下几个部分组成:1. 床身:刨床的主体部分,通常由铸铁或钢板制成,具有足够的强度和刚性。
2. 工作台:用于放置木材的平台,通常由铸铁制成,具有平整的表面和可调节的高度。
3. 刀轴:刨床刀具的旋转轴,通常由钢材制成,固定在床身上,并通过电机带动旋转。
4. 刀座:用于固定刨床刀具的部件,通常由铸铁制成,固定在刀轴上。
5. 传动装置:用于驱动工作台沿水平方向移动的装置,通常由电机和传动皮带组成。
三、操作步骤1. 准备工作:确保牛头刨床的工作环境干净整洁,刨床刀具安装完好,工作台调整到适当的高度。
2. 放置木材:将待刨削的木材放置在工作台上,并确保其与刨床刀具没有干涉。
3. 启动刨床:按下启动按钮,刨床开始运转。
此时,刨床刀具开始旋转,木材开始被刨削。
4. 调整刨削深度:根据需要,通过旋转调节手柄或调节杆,调整刨床刀具的刨削深度。
刨削深度的调整应逐渐进行,以避免过度刨削。
5. 移动木材:通过操作传动装置,使工作台沿水平方向移动,从而使木材被刨削的表面逐渐变化。
6. 检查刨削效果:定期停止刨床,检查刨削的木材表面,确保其平整度和尺寸精确度符合要求。
7. 完成工作:刨削完成后,关闭刨床,并将刨床刀具进行清洁和保养。
四、注意事项1. 操作人员应穿戴好防护设备,如安全眼镜和手套,以避免意外伤害。
2. 在操作过程中,应保持专注,避免分散注意力,以防止意外发生。

广西工学院鹿山学院机械原理课程设计说明书题目牛头刨床系别机械工程系专业班级机制082学生姓名欧浪学号20082309指导教师傅胜华日期2011.4.16牛头刨床中导杆机构的运动分析及动态静力分析第一章机械原理课程设计的目的和任务1课程设计的目的:机械原理课程设计是高等工业学校机械类学生第一次全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要教学环节。
起目的在于进一步加深学生所学的理论知识,培养学生的独立解决有关课程实际问题的能力,使学生对于机械运动学和动力学的分析和设计有一个比较完整的概念,具备计算,和使用科技资料的能力。
在次基础上,初步掌握电算程序的编制,并能使用电子计算机来解决工程技术问题。
2课程设计的任务:机械原理课程设计的任务是对机器的主题机构进行运动分析。
动态静力分析,并根据给定的机器的工作要求,在次基础上设计;或对各个机构进行运动设计。
要求根据设计任务,绘制必要的图纸,编制计算程序和编写说明书等。
第二章、机械原理课程设计的方法机械原理课程设计的方法大致可分为图解法和解析法两种。
图解法几何概念比较清晰、直观;解析法精度较高。
第三章、机械原理课程设计的基本要求1.作机构的运动简图,再作机构两个位置的速度,加速度图,列矢量运动方程;2.作机构两位置之一的动态静力分析,列力矢量方程,再作力的矢量图;3.用描点法作机构的位移,速度,加速度与时间的曲线。
第四章机械原理课程设计的已知条件设计数据:第五章选择设计方案一、机构运动简图O 215423A BA'B'C'O 4C图1-1二、选择表Ⅰ中方案Ⅱ。
1、曲柄位置“1`”速度分析,加速度分析(列矢量方程,画速度图,加速度图)取曲柄位置“1`”进行速度分析。
因构件2和3在A处的转动副相连,故V A2=V A3,其大小等于W2l O2A,方向垂直于O2 A线,指向与ω2一致。
ω2=2πn2/60 rad/s=6.70rad/sυA3=υA2=ω2·l O2A=6.70×0.09m/s=0.603m/s (⊥O2A)取构件3和4的重合点A进行速度分析。
机械原理课程设计实习报告一、设计任务二、牛头刨床简介及工作原理三、原始参数四、导杆机构的运动综合五、用解析法作导杆机构的运动分析六、导杆机构的动态静力分析七、Matlab编程并绘图八、行星轮系设计九、变位齿轮设计十、课程设计总结十一、参考文献十二、粉末成型压机方案设想一、设计任务1牛头刨床刀杆机构的运动综合、运动分析和动态静力分析; 2对牛头刨床传动装置中行星轮机构、齿轮机构进行综合。
二、牛头刨床简介及工作原理牛头刨床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批量生产。
为了适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回现象。
刨刀可随小刀架作不同进给量的垂直进给;安装工件的工作台应具有不同进给量的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加工。
牛头刨床是一种用于平面切削加工的机床,电动机经行星轮系和齿轮Z 4、 Z 5减速带动曲柄2转动。
刨床工作时,由导杆机构2-3-4-5-6带动刨头和刨刀作往复运动。
刨头向左时,刨刀进行切削,这个行程称工作行程,刨头受到较大的切削力。
刨头右行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产力。
图1牛头刨床外形图三、原始参数H :刨头行程 ; K :行程速比系数; Fc 切削阻力 ; m 4 m 5 m 6分别为导杆、连杆及刨头的质量;J 4、J 5分别分别为导杆4及导杆5绕各自质心的转动惯量;m 1、m H 分别为行星减速器中心轮及齿轮4、5的模数;Z 4,Z 5为齿轮4及5的齿数;n 1:电机转速;n 2:曲柄2及齿轮5的转速;k :行星轮个数。
kg m 2四、导杆机构的运动综合设L O3B =L 3 L BF =L 4 L O3D =L '6 L O2A =L 1 L O3O2=L 6 L O3A =S 3 L DE =S E 1、导杆的摆角ψ K=1.8180k 51.43180-︒+ψ=⇒ψ=︒︒ψ2、导杆的长度L 33H/2H 600mm L 691.4mm sin /2=⇒==ψ3、连杆的长度L 443L 0.3L 207.4mm =⨯=4、刨头导路中心线xx 至O3点的垂直距离L '6O3E 3L L cos 2622.9mm =⨯ψ=根据已知xx 被认为通过圆弧BB ’的绕度ME 的中点D 知O E'33O3M DM 63L L L L L L 657.2mm 2-=-=-=5、曲柄的长度L 1616L 370mm L L sin /2160.5mm =⇒=⨯ψ=6、切削越程长度0.05H ,如图所示则切削越程长度为0.05H=0.05×600=30mm7、机构运动简图8、计算机构的自由度 F=3×5-2×7=1五、用解析法作导杆机构的运动分析如图所示,先建立一直角坐标系,并标出各杆矢量及其方位角。

《机械原理》课程设计计算说明书设计题目:牛头刨床学院:机械工程学院专业班级:机自1421班学生姓名:郭文超学号: 03320142108指导教师:赵楠2016年07月04日——2016年07月07日目录工作原理 (3)一.设计任务 (4)二.设计数据 (4)三.设计要求 (5)1、运动方案设计 (5)2、确定执行机构的运动尺寸 (5)3、进行导杆机构的运动分析四.设计方案选定五.1.32.381111 (12)13工作原理.牛头刨床是一种用于平面切削加工的机床,如图a)所示。
电动机经过皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头左行时,刨刀不切削,称为空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回运动的导杆10-11各有一段0.05H(a)(b)图d表2求出刨头3的速度、加速度,将过程详细地写在说明书中。
四.设计方案选定如图所示,牛头刨床的主传动机构采用导杆机构、连杆滑块机构组成的5杆机构。
采用导杆机构,滑块与导杆之间的传动角r始终为90o,且适当确定构件尺寸,可以保证机构工作行程速度较低并且均匀,而空回行程速度较高,满足急回特性要求。
适当确定刨头的导路位置,可以使压力角 尽量小。
五.机构的运动分析1.3点速度分析当曲柄位于3点时如上图已知:ω04=2πn/60=7.536rad/sV A4 = V A3A4 + V A3方向:⊥杆4 ∥杆4 ⊥杆2大小:??√已知:V A3=ω04×L2 =7.536×110=828.96mm/s 作图得:V A4=670.05MM/Sω04=V A4/L AO4=670.05/513.91=1.306rad/s V B=ω04×L4=1.306 ×810=1057.86mm/sVc= V B + V CB方向:∥X-X √⊥杆BC大小:?√?由作图法得::V C2和3在A点处的转其大小等于ω22lO2A,方向由A指向O2。

机械原理课程设计说明书日期2012.6.16课程设计说明书—牛头刨床1.机构简介牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨刀每次削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减少主轴的速度波动,以提高切削质量和减少电动机容量。
1-11.导杆机构的运动分析已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。
要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上。
1.1设计数据牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作切削。
此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用急回作用得导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
机械原理课程设计说明书系部名称: 机电系专业班级: 04机制三班姓名:学号: **********目录概述 (3)设计项目...............................1.设计题目 (4)2.机构简介 (4)3.设计数据 (4)设计内容...............................1.导杆机构的设计 (5)2.凸轮机构的设计 (12)3.齿轮机构的设计 (17)设计体会 (20)参考文献 (21)附图·····························概述一、机构机械原理课程设计的目的:机械原理课程设计是高等工业学校机械类专业学生第一次较全面的机械运动学和动力学分析与设计的训练,是本课程的一个重要实践环节。
其基本目的在于:(1)进一步加深学生所学的理论知识,培养学生独立解决有关本课程实际问题的能力。
(2)使学生对于机械运动学和动力学的分析设计有一较完整的概念。
(3)使学生得到拟定运动方案的训练,并具有初步设计选型与组合以及确定传动方案的能力。
(4)通过课程设计,进一步提高学生运算、绘图、表达、运用计算机和查阅技术资料的能力。
二、机械原理课程设计的任务:机械原理课程设计的任务是对机械的主体机构(连杆机构、凸轮机构、齿轮机构以及其他机构)进行设计和运动分析、动态静力分析,并根据给定机器的工作要求,在此基础上设计凸轮、齿轮;或对各机构进行运动分析。
要求学生根据设计任务,绘制必要的图纸,编写说明书。
三、械原理课程设计的方法:机械原理课程设计的方法大致可分为图解法和解析法两种。
图解法几何概念较清晰、直观;解析法精度较高。

Harbin Institute of Technology机械原理课程设计说明书课程名称:机械原理设计题目:牛头刨床(方案1)院系:机电工程学院班级:1108301设计者:XXX学号:11108301XX指导教师:古乐设计时间:2013年7月哈尔滨工业大学一、功能描述刨刀水平作往复直线运动,切削安装在工作台上的工件。
刨刀每次切削一次,工作台沿着刨刀运动的水平垂直方向进给0.12、0.24、0.36mm/次,分3档可以调节。
刨刀每次切削一次,工作台沿着刨刀运动的上下垂直方向进给0.08、0.16、0.24mm/次,分3档可以调节。
工作台的水平与垂直进给不能同时进行。
刨刀最大行程520mm,每分钟刨刀切削15,24,37次,分3档可以调节。
电机功率约4KW,额定转速1420转/分。
图1-1 牛头刨床的使用功能描述简图二、工艺动作分析由使用功能描述可知,牛头刨床在加工平面时有两个工艺动作协调完成,即刨刀每切削一次,工作台沿着刨刀运动的水平垂直方向移动5mm以及工作台沿着刨刀运动的水平垂直方向的移动。
根据牛头刨床的工艺动作分析,选定执行构件刨刀头作为参考构件,据此,可以画出牛头刨床的运动循环图。
图2-1机械系统运动循环图三、运动功能分析根据分析的牛头刨床由原动机到执行机构的运动传递与转换的逻辑关系,可以绘制出牛头刨床的运动功能系统图。
图3-1 机械系统运动功能系统图四、机械系统运动方案拟定4.1 根据运动功能单元确定替代结构(1)一般情况下,在工厂的厂房内使用的普通机床都采用三相交流电动机作为原动机。
因此,牛头刨床也用三相交流电动机作为原动机,其额定转速为1420rpm。
图4-1 三相交流电动机及其运动功能单元表达符号(2)带传动机构具有传动可靠、结构简单、安装方便、制造成本低等优点。
在对尺寸要求不严格、传运精度要求不高的牛头刨床中,可以选用带传动机构满足过载保护的功能。
图4-2 带传动机构及其运动功能单元表达符号(3)圆柱齿轮传动机构具有传动可靠、结构简单、强度高、结构尺寸小等优点。
i目录一: 机械原理课程设计内容、要求以及目的 1 二:牛头刨床机构简介及原始数据 1 三:机构方案的初步确定 3 1:曲柄滑块机构与摆动导杆机构 32:曲柄滑块机构与扇形齿轮齿条机构 53:综合评定确定方案7 四:机构工艺动作分解及运动循环图8 五:主机构尺度综合及运动特性评定9 六:电动机功率与型号的确定22 七: 主机构受力分析25 八:飞轮转动惯量的计算30 九:减速机构以及工作台进给机构的确定32 十:设计心得与体会35 十一:参考资料36- 1 - 一:课程设计题目、内容及其目的题目:牛头刨床内容:平面刨削机床运动简图设计及分析,计算刨削机构在指定位置的速度、加速度、受力、绘制位移、速度、加速度曲线、平衡力矩曲线、等效阻力矩曲线以及等效驱动力曲线。
根据上述得到的数据,确定飞轮转动惯量。
目的:1:学会机械运动见图设计的步骤和方法;2:巩固所学的理论知识,掌握机构分析与综合的基本方法;3:培养学生使用技术资料,计算作图及分析与综和能力;4:培养学生进行机械创新设计的能力。
二:牛头刨床简介,机构的要求及原始数据1:牛头刨床简介牛头刨床是一种用于平面切削加工的机床,如图1。
电动机经皮带和齿轮传动,经过减速机构减速从而带动曲柄1。
刨床工作时,由导杆3经过连杆4带动刨刀5作往复运动。
刨头左行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量,刨头右行时,刨刀不切削,称空行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力(在切削的前后各有一段约0.05H的空刀距离,见图2,b),而空回行程中只有摩擦阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减小主轴的速度波动,以提高切削质量和减小电动机容量。

目录一、课程设计任务书 (4)1.工作原理及工艺动作过程 (4)2.原始数据及设计要求 (5)二、设计说明书 (6)1.画机构的运动简图 (6)2.对位置4点进行速度分析和加速度分析 (8)3.对位置9点进行速度分析和加速度分析 (11)速度分析图: (12)4.对位置9点进行动态静力分析 (14)心得体会 (18)谢辞 (19)参考文献 (20)一、课程设计任务书1.工作原理及工艺动作过程牛头刨床是一种用于平面切削加工的机床。
刨床工作时,如图(1-1)所示,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
切削阻力如图(b)所示。
Y图(1-1)(b)2.原始数据及设计要求已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。
要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上。
二、设计说明书1.画机构的运动简图1、以O4为原点定出坐标系,根据尺寸分别定出O2点,B点,C点。
确定机构运动时的左右极限位置。
曲柄位置图的作法为:取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
图1-2取第I方案的第4位置和第9位置(如下图1-3)。
图 1-32. 对位置4点进行速度分析和加速度分析(a ) 速度分析 取速度比例尺l μ=mm s m001.0对A 点: 4A V = 3A V + 34A A V方向:4BO ⊥ A O 2⊥ //B O 4 大小: ? √ ?4A V =l μ⨯4pa =sm mm mmsm673239.0239.673001.0=⨯4ω=AO A l V 44=sr mm sm38431.1486334.0673239.0= 34A A V =l μ43a a l =sm mm mm sm156326.0326.156001.0=⨯ V 5B = V 4B =4ω⨯B O l 4=s m 747530.0对于C 点: C V = B V + CB V 方向: //'XX B O 4⊥ BC ⊥ 大小: ? √ ?C V =l μ⨯pc l =mm s m001.0s m mm 749708.0708.749=⨯ CBV =l μ⨯bc l =mm s m001.0s m mm 0490895.00895.49=⨯5ω=bcl CBl u V =s r 363626.0 速度分析图:图 1-4(b)加速度分析 选取加速度比例尺为a μ=mm s m2001.0对于A 点:4A a = n A a 4 + t A a 4 = 3A a + k A A a 34 + 34rA A a 方向: A →4OB O 4⊥ A →2O B O 4⊥ //B O 4 大小: √ ? √ √ ? 由于3A a =22ωA O l 2=234263.4smKA A a 34=24ω34AA V =2432808.0s mnA a 4=24ωA O l 4=2931975.0s m 已知,根据加速度图1-5可得:t A a 4=a μ''a n l =2549416.0sm, r A A a 34=a μ''a k l =2298112.3sm 。
目录欧阳歌谷(2021.02.01)一、设计题目与原始数据- 1 -二、牛头刨床示意图- 2 -三、导杆机构设计- 2 -四、机构的运动阐发- 4 -五、机构静态静力阐发- 9 -六、飞轮设计- 13 -七、设计凸轮轮廓曲线- 15 -八、齿轮设计及绘制啮合图- 15 -九、解析法- 17 -1.导杆机构设计-17-2.机构运动阐发-17-3.凸轮轮廓曲线设计-20-4.齿轮机构设计-22-十、本设计的思想体会- 22 -参考文献- 23 -1 附录- 23 -一、设计题目与原始数据1.题目:牛头刨床的综合设计与阐发2.原始数据:刨头的行程 H=550mm行程速比系数 K=1.6机架长 LO2O3=400mm质心与导杆的比值 LO3S4/LO3B=0.5连杆与导杆的比值 LBF/LO3B=0.3刨头重心至F点距离 XS6=160mm导杆的质量 m4=15刨头的质量 m6=58导杆的转动惯量 JS4=0.7切割阻力 FC=1300N切割阻力至O2的距离 YP=175mm构件2的转速 n2=80许用速度不均匀系数 [δ]=1/40齿轮Z1、Z2的模数 m12=15小齿轮齿数 Z1=18年夜齿轮齿数 Z2=46凸轮机构的最年夜摆角φmax=16º凸轮的摆杆长LO4C=140mm凸轮的推程运动角δ0=60º凸轮的远休止角δ01=10º凸轮的回程运动角δ0'=60º凸轮机构的机架长 Lo2o4=150mm 凸轮的基圆半径 ro=55mm凸轮的滚子半径 rr=15mm 二、牛头刨床示意图如图1所示图1三、导杆机构设计1、已知:行程速比系数K=1.6刨头的行程H=550mm机架长度LO2O3=400mm连杆与导杆的比LBF/LO3B=0.32、各杆尺寸设计如下A、求导杆的摆角:ψmax =180°×(K1)/(K+1)=180°×(1.61)/(1.6+1)=42°B、求导杆长:LO3B1=H/[2sin(ψmax/2)]=550/[2sin(42°/2)]=776mmC、求曲柄长:LO2A =LO2O3×sin(ψmax/2)=400×sin21°=142mmD、求连杆长:LBF=LO3B×LBF/LO3B=776×0.3=233mmE、求导路中心到O3的距离:LO3M=LO3BLDE/2=LO3B{1[1cos(ψmax/2)]/2}=750mmF、取比例尺:μL=0.005m/mm在1#图纸中央画机构位置图,机构位置图见1#图纸。
牛头刨床机械原理课程设计2点和8
点2: 牛头刨床机械原理的调节和控制技术。
在牛头刨床机械
原理课程设计中,可以对牛头刨床的调节和控制技术进行研究和设计。
例如,可以设计一种自动调节刨床的刨削深度的系统,通过传感器实时监测刀刃与工件的距离,然后通过控制系统调节刀具的位置,以控制刨削深度。
同时,还可以设计控制系统,实现刀具的自动进给和回程,提高生产效率和工作精度。
点8: 牛头刨床机械原理的传动机构设计。
牛头刨床的传动机
构是将电动机的转速转化为合适的刨削速度和刨削力的重要部分。
在课程设计中,可以研究和设计不同类型的传动机构,如齿轮传动、皮带传动、链传动等,并通过分析和计算来确定合适的传动比例和齿轮参数。
此外,还可以研究如何通过变速机构实现刨削速度的调节和刨床行程的控制。
对传动机构的设计和优化可以提高刨床的工作效率和稳定性。

课程设计说明书—牛头刨床1. 机构简介牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称要求速度较高,以提高生产率。
为此刨用的导杆机间,凸轮8构,使工作,以便刨刀继续切削阻力,而空整个运动循环中,大的,这就影响了主轴的匀速运转,故需少主轴的速度波动,以提高切削质量和减少电动机容量。
图1-11.导杆机构的运动分析已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x位于导杆端点B所作圆弧高的平分线上。
要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上。
1.1设计数据牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作切削。
此时要求速度较低且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用急回作用得导杆机构。
刨刀每切削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此1.2曲柄位置的确定曲柄位置图的作法为:取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3…12等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
图1-2选择表Ⅰ中方案Ⅱ取第2位置和第8位置(如下图1-3)。
机械原理课程设计说明书
日期2012.6.16
课程设计说明书—牛头刨床
1.机构简介
牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复运动。
刨头右行时,刨刀进行切削,称工作行程,此时要求速度较低并且均匀,以减少电动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产率。
为此刨床采用有急回作用的导杆机构。
刨刀每次削完一次,利用空回行程的时间,凸轮8通过四杆机构1-9-10-11与棘轮带动螺旋机构,使工作台连同工件作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响了主轴的匀速运转,故需安装飞轮来减少主轴的速度波动,以提高切削质量和减少电动机容量。
1-1
1.导杆机构的运动分析
已知曲柄每分钟转数n2,各构件尺寸及重心位置,且刨头导路x-x
位于导杆端点B所作圆弧高的平分线上。
要求作机构的运动简图,并作机构两个位置的速度、加速度多边形以及刨头的运动线图。
以上内容与后面动态静力分析一起画在1号图纸上。
1.1设计数据
牛头刨床是一种用于平面切削加工的机床。
电动机经皮带和齿轮传动,带动曲柄2
和固结在其上的凸轮8。
刨床工作时,由导杆机构2-3-4-5-6带动刨头6和刨刀7作往复
运动。
刨头右行时,刨刀进行切削,称工作切削。
此时要求速度较低且均匀,以减少电
动机容量和提高切削质量;刨头左行时,刨刀不切削,称空回行程,此时要求速度较高,以提高生产效率。
为此刨床采用急回作用得导杆机构。
刨刀每切削完一次,利用空回行
程的时间,凸轮8通过四杆机构1-9-10-11与棘轮机构带动螺旋机构,使工作台连同工件
作一次进给运动,以便刨刀继续切削。
刨头在工作行程中,受到很大的切削阻力,而空
回行程中则没有切削阻力。
因此刨头在整个运动循环中,受力变化是很大的,这就影响
了主轴的匀速运转,故需装飞轮来减小株洲的速度波动,以减少切削质量和电动机容量。
1.2曲柄位置的确定
曲柄位置图的作法为:取1和8’为工作行程起点和终点所对应的曲柄位置,1’和7’为切削起点和终点所对应的曲柄位置,其余2、3 (12)
等,是由位置1起,顺ω2方向将曲柄圆作12等分的位置(如下图)。
取第方案的第8位置和第5位置(如下图)。
1.5速度分析
以速度比例尺µ=(0.01m/s)/mm和加速度比例尺µa=(0.05m/s ²)/mm用相对运动的图解法作该两个位置的速度多边形和加速度多边形如下图1-4,1-5,并将其结果列入表格(1-2)
表格1-1
8号位置速度图:如图
4
由图解得:Vc=0.00092562741m/s
8号位置加速度图:如图
a"4
k'a'4
P
b'
由图解的:a C =6.9317473396m/s 2
表格(1-2)
各点的速度,加速度分别列入表1-3,1-4中表1-3
表1-4
1.4导杆机构的动态力分析
已知各构件的重量G(曲柄2、滑块3和连杆5的重量都可忽略不计),导杆4绕重心的转动惯量Js4及切削力P的变化规律。
要求求各运动副中反作用力及曲柄上所需要的平衡力矩。
以上内容做在运动分析的同一张图纸上。
首先按杆组分解实力体,用力多边形法决定各运动副中的作用反力和加于曲柄上的平衡力矩。
参考图1-3,将其分解为5-6杆组示力体,3-4杆组示力体和曲柄。
图2-1
2.1矢量图解法:
取5号位置为研究对象:
x
2.1.15-6杆组示力体共受五个力,分别为P、G6、F i6、R16、R45,其中R45和R16方向已知,大小未知,切削力P沿X轴方向,指向刀架,重力G6和支座反力F16均垂直于质心,R45沿杆方向由C指向B,惯性力Fi6大小可由运动分析求得,方向水平向左。
选取比例尺μ= (10N)/mm,作力的多边形。
将方程列入表2-1。
U=10N/mm
已知P=9000N,G6=800N,
又a c=a c5=4.5795229205m/s2,那么我们可以计算
F I6=- G6/g×a c
=-800/10×4.5795229205
=-366.361834N
又ΣF=P+ G6 + F I6 + F45 + F RI6=0,
方向//x轴↓←B→C ↑
大小9000 800 √??
作为多边行如图1-7所示
P
G 6
F I6
F 45
N
图1-7
图1-7力多边形可得:
F45=8634.49503048N
N=950.05283516 N
在图1-6中,对c点取距,有
ΣM C=-P·y P-G6X S6+ F R16·x-F I6·y S6=0
代入数据得x=1.11907557m
分离3,4构件进行运动静力分析,杆组力体图如图1-8所示,2.1.2对3-4杆组示力体分析
F x
u=10N/mm
已知:F54=-F45=8634.49503048N,G4=220N
a B4=a A4· l O4S4/l O4A=2.2610419m/s2 ,
αS4=α4=7.79669621rad/s2
由此可得:F I4=-G4/g×a S4 =-220/10×2.2610419N=-49.7429218N M S4=-J S4·a S4=-9.35603545
在图1-8中,对O4点取矩得:
M O4=M s4 + F I4×x4 + F23×x23+ F54×x54 + G4×x4 = 0
代入数据,得
M O4=-9.35603545-49.7429218×0.29+F23×0.41859878959+86 34.49503048×0.57421702805+220×0.0440*******=0
故F23=11810.773N
F x + F y + G4 + F I4 + F23 + F54 = 0
方向:??√M4o4 √√
大小:√√↓√┴O4B √
4
F 54
F y
由图解得:F x =2991.6124744N
F y =1414.4052384N 方向竖直向下
2.1.3
对曲柄分析,共受2个力,分别为R 32,R 12和一个力偶M ,
由于滑块3为二力杆,所以
R 32= R 34,方向相反,因为曲柄
2只受两个力和一个力偶,所以FR 12与FR 32等大反力,由
此可以求得:
F 12
h2=72.65303694mm,则,
对曲柄列平行方程有,
ΣM O2=M-F32·h2=0 即
M=0.07265303694*11810.773=0,即M=858.088527N·M。