过程装备中数据采集系统的低功耗设计
- 格式:pdf
- 大小:625.17 KB
- 文档页数:3

工控机编辑工控机(Industrial Personal Computer,IPC)即工业控制计算机,是一种采用总线结构,对生产过程及机电设备、工艺装备进行检测与控制的工具总称。
工控机具有重要的计算机属性和特征,如具有计算机CPU、硬盘、内存、外设及接口,并有操作系统、控制网络和协议、计算能力、友好的人机界面。
工控行业的产品和技术非常特殊,属于中间产品,是为其他各行业提供可靠、嵌入式、智能化的工业计算机。
目录1概述2主要分类3软件系统4主要结构5适用领域6主要特点7日常维护8发展前景9国内市场1概述工控机全称工业控制计算机,是专门为工业控制设计的计算机,用于对生产工控机过程中使用的机器设备、生产流程、数据参数等进行监测与控制。
工控机经常会在环境比较恶劣的环境下运行,对数据的安全性要求也更高,所以工控机通常会进行加固、防尘、防潮、防腐蚀、防辐射等特殊设计。
工控机对于扩展性的要求也非常高,接口的设计需要满足特定的外部设备,因此大多数情况下工控机需要单独定制才能满足需求。
2主要分类目前工控机的主要类别有:IPC(PC总线工业电脑)、PLC(可编程控制系统)、DCS (分散型控制系统)、FCS(现场总线系统)及CNC(数控系统)五种。
1、IPC即基于PC总线的工业电脑。
据2000年IPC统计目前PC机工控机(图1)已占到通用计算机的95%以上,因其价格低、质量高、产量大、软/硬件资源丰富,已被广大的技术人员所熟悉和认可,这正是工业电脑热的基础。
其主要的组成部分为工业机箱、无源底板及可插入其上的各种板卡组成,如CPU卡、I/O卡等。
并采取全钢机壳、机卡压条过滤网,双正压风扇等设计及EMC(electromagneticcompatibility)技术以解决工业现场的电磁干扰、震动、灰尘、高/低温等问题。
IPC有以下特点:可靠性:工业PC具有在粉尘、烟雾、高/低温、潮湿、震动、腐蚀和快速诊断和可维护性,其MTTR(MeanTimetoRepair)一般为5min,MTTF10万小时以上,而普通PC的MTTF仅为10000~15000小时。

芯片原生代码-概述说明以及解释1.引言1.1 概述芯片原生代码是指在芯片设计和制造过程中所使用的底层编码语言。
它是一种与特定硬件架构紧密相关的编程语言,用于描述芯片的电子元件、逻辑电路和功能。
芯片原生代码直接操作硬件资源,能够实现高效的计算和控制功能。
随着科技的不断进步,芯片在现代社会中扮演着至关重要的角色。
它们广泛应用于计算机、通信、汽车、医疗、家电等各行各业。
在计算机领域,芯片原生代码被用于编程和控制中央处理器(CPU)、图形处理器(GPU)、内存等核心组件,为各种应用程序的运行提供底层支持。
在通信领域,芯片原生代码被用于编程和控制无线电模块、通信协议等,实现高速、稳定的数据传输和通信功能。
芯片原生代码的发展历程可以追溯到计算机产业的早期阶段。
早期的芯片原生代码主要基于机器指令,语法简单、效率高,但编写和调试困难。
随着计算机技术的快速发展,芯片原生代码逐渐演变为更加高级的编程语言,如汇编语言和C语言。
这些语言在编写和理解上更加容易,同时保持了较高的执行效率。
在现代芯片设计中,芯片原生代码具有重要的意义。
它使得芯片设计人员能够直接控制硬件资源,实现对芯片功能的精确控制。
同时,芯片原生代码也是软件开发人员的关键工具,用于编写与特定芯片相适应的驱动程序和应用软件。
未来,随着新一代芯片技术的不断涌现,芯片原生代码的重要性将会更加凸显。
随着人工智能、物联网、自动驾驶等领域的迅速发展,对芯片计算和控制能力的要求将会不断提高。
因此,对芯片原生代码的深入研究和理解显得尤为重要。
只有不断推动芯片原生代码的创新和优化,才能满足日益增长的社会需求,实现芯片技术的进一步突破和发展。
1.2 文章结构本文主要分为引言、正文和结论三个部分。
引言部分将对芯片原生代码的概述进行介绍,说明文章的目的和重要性。
首先,我们将概述芯片的定义和作用,介绍其在现代社会中的广泛应用。
然后,我们将详细介绍芯片的发展历程,从最早的集成电路到现代的多核处理器。
数据采集方案目录一、工业环境背景 (2)1.基于“工业4.0”及“中国智造2025”的智慧化工业环境 (2)2.控制/执行层所需要的最优化的支撑环境 (2)二、智能控制过程中三大模块在MES/ERP的架构中的作用 (3)1.工业软件模块 (4)2.执行设备模块 (4)3.工业通讯路由控制器 (5)三、工业现场信息数据的采集方式 (9)1.传感器信息数据采集 (10)2.标准通信接口信息数据采集 (10)3.视觉识别信息数据采集 (11)四、基于SartAgent系统环境的信息数据采集架构 (11)1.解决方案宗旨: (11)2.信息数据采集系统整体架构 (12)1)一站式智能装备生态系统 (12)2)控制系统解决方案特点 (13)3)系统整体架构拓扑图 (13)4)采用DW系列信息数据采集模式 (15)(1)通过标准通信接口获取信息数据 (15)(2)通过传感器获取信息数据 (15)(3)通过视觉识别获取信息数据 (16)3.系统构成 (17)1)Smart Agent统一开发平台 (17)2)SmartAgent支持的工业网络协议 (19)3)SmartAgent控制器 (20)(1)DW-59一体化控制系统 (20)a.参数配置 (20)b.编程环境支持 (21)c.应用场景 (23)d.优势 (23)(2)DW-79一体化控制系统 (24)a.参数配置 (24)b.编程环境 (25)c.应用场景 (26)d.优势 (27)(3)DW-28系列工业协议路由器 (28)a.参数配置 (28)b.编程环境支持 (29)c.应用场景 (29)d.优势 (30)一、工业环境背景1.基于“工业4.0”及“中国智造2025”的智慧化工业环境➢制造业从数字化到智慧化是发展趋势--智慧化和网络化是工业4.0的未来发展方向➢智慧工厂是工业4.0的最终形态--实现智慧工厂的前提是数字化工厂,而数字化车间是数字化工厂为基础➢数字化工厂的层次架构--大致可以分成5个层次:分别是企业层、管理层、操作层、控制层和现场层,各个层次之间通过工业通讯网络连接。

什么是RFID主要包括产业化关键技术和应用关键技术两方面[1],其中RFID产业化关键技术主要包括:标签芯片设计与制造:例如低本钱、低功耗的RFID芯片设计与制造技术,适合标签芯片实现的新型存储技术,防冲突算法及电路实现技术,芯片平安技术,以及标签芯片与传感器的集成技术等。
天线设计与制造:例如标签天线匹配技术,针对不同应用对象的RFID 标签天线结构优化技术,多标签天线优化分布技术,片上天线技术,读写器智能波束扫描天线阵技术,以及RFID标签天线设计仿真软件等。
RFID标签封装技术与装备:例如基于低温热压的封装工艺,精密机构设计优化,多物理量检测与控制,高速高精运动控制,装备故障自诊断与修复,以及在线检测技术等。
RFID标签集成:例如芯片与天线及所附着的特殊材料介质三者之间的匹配技术,标签加工过程中的一致性技术等。
读写器设计:例如密集读写器技术,抗干扰技术,低本钱小型化读写器集成技术,以及读写器平安认证技术等。
RFID应用关键技术主要包括:RFID应用体系架构:例如RFID应用系统中各种软硬件和数据的接口技术及效劳技术等。
RFID系统集成与数据管理:例如RFID与无线通信、传感网络、信息平安、工业控制等的集成技术,RFID应用系统中间件技术,海量RFID信息资源的组织、存储、管理、交换、分发、数据处理和跨平台计算技术等。
RFID公共效劳体系:提供支持RFID社会性应用的根底效劳体系的认证、注册、编码管理、多编码体系映射、编码解析、检索与跟踪等技术与效劳。
RFID检测技术与标准:例如面向不同行业应用的RFID标签及相关产品物理特性和性能一致性检测技术与标准,标签与读写器之间空中接口一致性检测技术与标准,以及系统解决方案综合性检测技术与标准等。
什么是RFID技术?RFID射频识别是一种非接触式的自动识别技术,它通过自动识别目标对象并获取相关数据,识别工作无须人工干预,可工作于各种恶劣环境。
可识别高速运动物体并可同时识别多个标签,操作快捷方便。
第1章物联网概论1.简述物联网的定义物联网是指通过信息传感设备,按照约定的协议,把任何物品与互联网连接起来,进行信息交换和通讯,以实现智能化识别、定位、跟踪、监控和管理的一种网络。
它是在互联网基础上延伸和扩展的网络。
2.简述物联网应具备的三个特征(1)全面感知:利用射频识别、二维码、传感器等感知、捕获、测量技术随时随地对物体进行信息采集和获取;(2)可靠传送:通过将物体接入信息网络,依托各种通信网络,随时随地进行可靠的信息交互和共享;(3)智能处理:利用各种智能计算技术,对海量的感知数据和信息进行分析并处理,实现智能化的决策和控制。
3.简述信息浪潮15年定律的内容“计算模式每隔15年发生一次变革”被称为“15年周期定律”。
4.请解释以下名词:RFID;EPCRFID:Radio Frequency Identification射频识别。
EPC:Electronic Product Code产品电子代码。
5.物联网的三大推动力分别是什么?政府;企业;教育界与科技界。
6.国家提出的战略性新兴产业领域,主要包括哪七个方面?1)、节能环保产业;2)、新一代信息技术产业;3)、生物产业;4)、高端装备制造产业;5)、新能源产业;6)、新材料产业;7)、新能源汽车产业。
第2章物联网应用案例11.请说出数字城市发展的两个阶段数字化是数字城市发展的第一阶段。
在这一阶段,数字城市实现了无纸化、自动化办公,同时网络基础设施建设完成。
信息化是数字城市发展的第二阶段。
政府信息化、产业信息化、领域信息化和社会信息化发展迅速,各个部门内部形成有效的信息系统。
2.什么是智慧城市?智慧城市是充分利用数字化及相关计算机技术和手段,对城市基础设施与生活发展相关的各方面内容进行全方面的信息化处理和利用,具有对城市地理、资源、生态、环境、人口、经济、社会等复杂系统的数字网络化管理、服务与决策功能的信息体系。
3.谈谈数字城市与智慧城市的区别一是关注点不同。
过程装备控制技术-计算机控制系统过程装备控制技术是指利用计算机控制系统对工业生产过程中的装备进行控制和监控的技术。
下面是一个详细的过程装备控制技术的计算机控制系统的过程:1. 设计控制系统:首先,需要根据具体的生产过程和装备的特点,设计一个适合的控制系统。
这包括确定需要控制的参数、传感器和执行器的选择以及系统的结构和算法等。
2. 传感器和执行器的安装:根据设计的控制系统,安装相应的传感器和执行器。
传感器用于监测装备的状态和参数,例如温度、压力、速度等;执行器用于控制装备的运动和操作,例如电机、阀门等。
3. 数据采集和处理:传感器采集到的数据通过数据采集系统传输到计算机控制系统中。
计算机控制系统对采集到的数据进行处理和分析,得到装备的状态和参数。
4. 控制算法的实现:根据控制系统的设计,开发相应的控制算法。
控制算法根据装备的状态和参数,计算出相应的控制指令。
5. 控制指令的传输和执行:计算机控制系统将计算出的控制指令传输到执行器,执行器根据指令控制装备的运动和操作。
6. 监控和故障检测:计算机控制系统实时监测装备的状态和参数,进行故障检测和诊断。
如果发现故障,系统会发出警报并采取相应的措施。
7. 数据记录和分析:计算机控制系统会将采集到的数据进行记录和分析,用于生产过程的优化和改进。
这些数据可以用于监测装备的运行情况、故障分析和预测等。
8. 人机界面:计算机控制系统提供一个人机界面,使操作人员可以对装备进行监控和控制。
通过人机界面,操作人员可以查看装备的状态、调整控制参数、进行故障排查等操作。
总结起来,过程装备控制技术的计算机控制系统包括设计控制系统、传感器和执行器的安装、数据采集和处理、控制算法的实现、控制指令的传输和执行、监控和故障检测、数据记录和分析以及人机界面等步骤。
这些步骤相互配合,实现对装备的精确控制和监控。
农业行业智能农业装备研发方案第一章智能农业装备研发背景与意义 (3)1.1 智能农业装备发展现状 (3)1.2 智能农业装备市场需求 (3)1.3 智能农业装备研发的重要性 (3)第二章智能农业装备研发目标与任务 (4)2.1 研发目标 (4)2.1.1 提升农业生产力 (4)2.1.2 促进农业现代化 (4)2.1.3 提高农产品质量与安全性 (4)2.2 研发任务 (4)2.2.1 研发适用于不同作物和环境的智能农业装备 (4)2.2.2 研发具有自主学习与优化功能的智能农业装备 (4)2.2.3 研发具备远程监控与管理的智能农业装备 (5)2.3 技术指标 (5)2.3.1 硬件功能指标 (5)2.3.2 软件功能指标 (5)2.3.3 系统集成与兼容性指标 (5)第三章智能农业装备关键技术分析 (5)3.1 传感器技术 (5)3.2 控制系统技术 (6)3.3 数据处理与分析技术 (6)第四章智能农业装备系统设计 (7)4.1 系统架构设计 (7)4.1.1 系统整体架构 (7)4.1.2 硬件架构 (7)4.1.3 软件架构 (7)4.2 系统模块设计 (7)4.2.1 数据采集模块 (7)4.2.2 数据处理模块 (7)4.2.3 数据传输模块 (8)4.2.4 决策控制模块 (8)4.2.5 用户界面模块 (8)4.3 系统功能设计 (8)4.3.1 数据采集与传输 (8)4.3.2 数据存储与管理 (8)4.3.3 数据分析 (8)4.3.4 决策执行 (8)第五章智能农业装备硬件研发 (9)5.1 关键硬件组件选型 (9)5.2 硬件集成设计 (9)5.3 硬件功能优化 (9)第六章智能农业装备软件研发 (10)6.1 软件架构设计 (10)6.1.1 架构设计原则 (10)6.1.2 架构设计内容 (10)6.2 软件模块开发 (11)6.2.1 模块划分 (11)6.2.2 模块开发流程 (11)6.3 软件功能优化 (11)6.3.1 功能优化策略 (11)6.3.2 功能优化实践 (12)第七章智能农业装备试验与测试 (12)7.1 试验方法与流程 (12)7.1.1 试验方法 (12)7.1.2 试验流程 (12)7.2 测试指标与标准 (13)7.2.1 测试指标 (13)7.2.2 测试标准 (13)7.3 试验结果分析 (13)7.3.1 模拟试验结果分析 (13)7.3.2 现场试验结果分析 (13)7.3.3 对比试验结果分析 (13)第八章智能农业装备产业化与推广 (14)8.1 产业化路径 (14)8.1.1 技术研发与集成 (14)8.1.2 产业集聚与发展 (14)8.1.3 产业链延伸与拓展 (14)8.2 推广策略 (14)8.2.1 政策扶持 (14)8.2.2 宣传培训 (14)8.2.3 示范引领 (14)8.3 产业链建设 (14)8.3.1 上游产业链建设 (15)8.3.2 中游产业链建设 (15)8.3.3 下游产业链建设 (15)第九章智能农业装备政策与法规 (15)9.1 政策支持 (15)9.1.1 政策背景 (15)9.1.2 政策措施 (15)9.2 法规制定 (15)9.2.1 法规背景 (15)9.2.2 法规内容 (15)9.3 政策法规实施 (16)9.3.1 政策法规宣传 (16)9.3.2 政策法规执行 (16)9.3.3 政策法规评估 (16)第十章智能农业装备研发项目管理 (16)10.1 项目组织与管理 (16)10.2 项目进度控制 (17)10.3 项目风险与应对措施 (17)第一章智能农业装备研发背景与意义1.1 智能农业装备发展现状我国科技水平的不断提高和农业现代化的深入推进,智能农业装备的研发与应用逐渐成为农业发展的重点。

标识:XXXX软件系统和硬件设备使用维护说明书编制/日期:审核/日期:批准/日期:XX有限公司2023年1 概述1.1 产品特点XX由XX有限公司设计制作。
该系统主要包括XX主机以及附件两部分,能够实现XX探测功能。
1.2 主要用途和适用范围XX主要实现环境自适应的设备。
主要适用于XX的环境感知关键技术、适用于不同工作场景的机制,能够通过连续不断地认知XX环境的各种信息,并对这些信息分析、学习和判断,且能实时自适应地调整发送端参数来达到对信道改变和对抗干扰的适应,实现功能的有效性和可靠性。
2 主要技术参数速率:功耗休眠模式:≤10w待机模式:≤10W接收模式:≤50W工作模式:≤500W3 主要结构XX系统组成如图2-1所示:系统由主处理电路、协处理电路、接口电路以及电源电路组成。
图2-1 XX系统3.1 主/协处理电路主处理电路采用XX芯片,该芯片在保证处理性能的前提下很好地控制了芯片的功耗,适用于多种嵌入式开发领域。
协处理电路采用XX作为处理芯片,利用其并行处理能力,快速实现数字滤波,高精度ADC以及DAC均由XX驱动。
3.2 模拟调理电路模拟调理电路主要分为两部分:一是XX内置ADC之前的调理电路部分,该部分主要用于系统值班,采用低功耗设计。
二是高精度ADC之前的调理电路部分,该部分简化为程控放大器,以保证系统具备足够的动态范围,同时简化电路复杂度,利用高精度ADC高质量采集信号后进行数字滤波。
3.3 功率放大电路功率放大电路采用X类功放,具备较高的能量效率,采用先进的XX波调制方法后相位失真可得到有效的控制。
3.4 接口电路接口电路主要包XX以及网口,通过这两个接口传递消息以及控制命令,系统设计预留了USB口用于调试时读取FLSAH中存储的数据。
3.5 系统电源电路系统设计供电电压DCXV,供电模块采用宽输入范围设计(XV-XV),功率放大电路、模拟调理电路以及其他数字电路的电源采用隔离设计。
智能岗哨枪支离位报警管理系统1.系统概述军事单位岗哨枪支离位系统是公司根据近期某些军事单位发生的袭哨、抢哨、擅离岗哨、抢夺枪支等事件为背景,以当今世界上最先进的无线射频识别技术、传感技术、监控技术、通讯技术、RTLS实时定位技术为基础而开发出来的安防系统。
该系统具有:枪、人离位实时告警、事件记录、撤防布防、追踪定位、实用性广、强抗干扰等特点。
我们研制开发的“智能岗哨枪支离位报警管理系统”。
现已实地安装使用在了部队流动哨兵和固定哨兵枪支上,通过连接“报警控制指挥中心”(值班室),实现了及时,准确,多方位,多功能的报警效果,该系统具有操作简单、使用方便、配置合理、针对性强、运行稳定等优点,达到了各项设计功能。
并已装备部队。
2.系统原理在“81式”、“81—1式”、“95式” “03式”等自动步枪枪托内设有微型信号发射器(枪支监控标签),安装在枪托上,根据岗哨实际情况,划定系统监测控制范围即警戒线,接收机采集的信号通过单片机进行分析,当哨兵出现脱岗离位4-5米时,枪支离位报警系统定位阅读主机失去信号,枪支监控标签蜂鸣提示或者定位阅读主机声光报警提示枪支异常离位,若在规定的时间内回来,系统恢复正常,否则报警系统将视为枪支被盗抢的警情,经比较确认,报警器发出报警。
值班室的报警主机收到报警信号后,声光显示哨位号码,并发出警报声音。
值班人员可安排应急分队进行处置。
为了对哨兵的值勤情况全过程的了解,以及对突发事件发生后提供备查资料,报警主机设立存储单元,对枪支离位情况进行全面的记录。
3.系统架构与方案阐述智能岗哨枪支离位报警管理系统主要是由枪支离位监控RFID硬件设备和系统软件两大部分组成。
3.1枪支离位监控硬件1)RFID监控定位阅读主机(也叫监控主机、双频一体化读写器)设备分为2.45G与125K,监控主机主要是负责数据采集标签发出的信号,设备可以外接一路声光报警器,通过RJ45网线或者串口RS485把标签数据发送到后台服务器2)RFID枪支监控标签。
关于加快推动制造业绿色化发展的指导意见作者:来源:《中小企业管理与科技·下半月》2024年第02期工业和信息化部联合国家发展改革委、财政部等七部门发布我国首个《关于加快推动制造业绿色化发展指导意见》,意见提出到2030年,绿色工厂产值占制造业总产值比重超过40%,绿色发展成为推进新型工业化的坚实基础。
《指导意见》提出,要从推动产业结构高端化转型、能源消费低碳化转型、资源利用循环化转型、生产过程清洁化转型、产品供给绿色化转型、制造流程数字化转型等六个方面,做强绿色制造业,发展绿色服务业,壮大绿色能源产业,发展绿色低碳产业和供应链。
为深入贯彻落实黨的二十大精神,推动制造业绿色化发展,在落实碳达峰碳中和目标任务过程中锻造新的产业竞争优势,加快建设现代化产业体系,推进新型工业化,提出如下意见。
一、总体要求(一)指导思想以习近平新时代中国特色社会主义思想为指导,深入贯彻落实党的二十大精神,立足新发展阶段,完整、准确、全面贯彻新发展理念,加快构建新发展格局,着力推动高质量发展,以实现碳达峰碳中和目标为引领,改造升级传统产业,巩固提升优势产业,加快推动新兴产业绿色高起点发展,前瞻布局绿色低碳领域未来产业,培育绿色化数字化服务化融合发展新业态,建立健全支撑制造业绿色发展的技术、政策、标准、标杆培育体系,推动产业结构高端化、能源消费低碳化、资源利用循环化、生产过程清洁化、制造流程数字化、产品供给绿色化全方位转型,构建绿色增长新引擎,锻造绿色竞争新优势,擦亮新型工业化生态底色。
(二)主要目标到2030年,制造业绿色低碳转型成效显著,传统产业绿色发展层级整体跃升,产业结构和布局明显优化,绿色低碳能源利用比例显著提高,资源综合利用水平稳步提升,污染物和碳排放强度明显下降,碳排放总量实现达峰,新兴产业绿色增长引擎作用更加突出,规模质量进一步提升,绿色低碳产业比重显著提高,绿色融合新业态不断涌现,绿色发展基础能力大幅提升,绿色低碳竞争力进一步增强,绿色发展成为推进新型工业化的坚实基础。

第1章嵌入式体系基本【1 】1.什么是嵌入式体系?它由哪几部分构成?有何特点?写出你所想到的嵌入式体系.答:(1)界说:国内对嵌入式体系的一般界说是:以运用为中间,以盘算机技巧为基本,软硬件可裁剪,从而可以或许顺应现实运用中对功效.靠得住性.成本.体积.功耗等严厉请求的专用盘算机体系.(2)构成:嵌入式处理器.外围装备.嵌入式操纵体系和运用软件等几部分构成.(3)特点:a.软硬件一体化,集盘算机技巧.微电子技巧.行业技巧于一体;b.须要操纵体系支撑,代码小,履行速度快;c.专用紧凑,用处固定,成本迟钝;d.靠得住性请求高;e.多样性,运用普遍,种类繁多.(4)嵌入式体系:小我数字助理(PDA).机顶盒(STB).IP德律风.2.嵌入式处理器分为哪几类?答:(1)低端的微控制器(MicroController Unit,MCU);(2)中高端的嵌入式微处理器(Embeded MicroProcessor Unit,EMPU);(3)通讯范畴的DSP处理器(Digital Signal Processor,DSP);(4)高度集成的片上体系(System on Chip,SoC).3.ARM英文原意是什么?它是一个如何的公司?其处理器有何特点?答:(1)英文原意:Advanced RISC Machines.高等精简指令集机械.(2)公司简介:该公司是全球领先的16/32位RISC微处理器常识产权设计供给商,经由过程将其高机能.低成本.低功耗的RISC微处理器.外围和体系芯片设计技巧让渡给合作伙伴来临盆各具特点的芯片.ARM公司已成为移动通讯.手持装备.多媒体数字花费嵌入式解决计划的RISC尺度.(3)其处理器特点:a.小体积.低功耗.低成本而高机能;b.16/32位双指令集;c.全球的合作伙伴浩瀚.4.什么是及时体系?它有哪些特点?若何分类?答:(1)及时体系的界说:及时体系(Real Time System)是指产生体系输出的时光对体系至关重要的体系.(2)特点:及时性.并行性.多路性.自力性.可猜测性.靠得住性.(3)分类:依据响应时光的不合,及时体系可分为3种类型:强及时体系.弱及时体系.一般及时体系.依据肯定性的不合,及时体系可分为2种类型:硬及时.软及时.5.RTOS由哪几部分构成?它有哪些特点?与一般操纵体系比拟有何不合?答:(1)构成:及时内核.收集组件.文件体系.图形用户界面.(2)特点:a.支撑异步事宜的响应;b.中止和调剂义务的优先级机制;c.支撑抢占式调剂;d.肯定的义务切换时光和中止延迟时光;e.支撑同步.(3)与一般OS的不合:a.及时性:响应速度快,只有几微秒;履行时光肯定,可猜测;b.代码尺寸小:只有10~100KB,节俭内存空间,下降成本;c.运用程序开辟较难;d.须要专用开辟对象:仿真器.编译器和调试器等.6.单片机体系.嵌入式体系和SOC体系三者有何差别和接洽?答:(1)今朝嵌入式体系的主流是以32位嵌入式微处理器为焦点的硬件设计和基于及时操纵体系(RTOS)的软件设计;(2)单片机体系多为4位.8位.16位机,不合适运行操纵体系,难以进行庞杂的运算及处理功效;(3)嵌入式体系强调基于平台的设计.软硬件协同设计,单片机大多采取软硬件流水设计;(4)嵌入式体系设计的焦点是软件设计(占70%阁下的工作量),单片机体系软硬件设计所占比例基底细同.(5)SoC是嵌入式体系的最高实现情势,它集成了很多功效模块,它的焦点技巧是IP(Intellectual Property Core,常识产权核)核.7. 无第2章嵌入式体系开辟进程1.嵌入式体系开辟进程分为哪几个阶段?每个阶段的特点是什么?答:(1)需求剖析阶段:a.对问题的辨认和剖析;b.制订例格解释文档;c.需求评审.(2)设计阶段:a.数据流剖析;b.划分义务;c.界说义务间的接口.(3)生成代码阶段:a.代码编程;b.交叉编译和链接;c.交叉调试;d.测试.(4)固化阶段2.嵌入式体系有哪几种调试方法?如今最风行的是哪种?运用什么接口?答:(1)调试方法:源程序模仿器方法.监控器方法.仿真器方法.(2)如今最风行的是仿真器方法,运用JTAG(Joint Test Action Group,结合测试行为组)接口.3.什么是板级支撑包?它一般应完成哪些工作?答:(1)界说:有些嵌入式操纵体系的内核明白分为两层,上层一般称为“内核”,而底层则称为“硬件抽象层”或“硬件适配层”,缩写为HAL,有的厂商将硬件抽象层称为BSP,即板级支撑包(BoardSupport Package).(2)重要完成工作:a.在体系启动时,对硬件进行初始化.B.为驱动程序供给拜访硬件的手腕.(3)重要感化:清除硬件差别.第3章 ARM体系构造1.ARM的英文全名是什么?ARM处理器有什么特点?答:见第1章课后习题第3题.2.ARM7和ARM9在流水线方面有何不合?答:ARM7是3级流水线构造,ARM9是5级流水线构造.AR]M9把3级流水线中的履行阶段的操纵进行再分派,即把履行阶段中的“存放器读”插在译码阶段中完成,把“存放器写”安插在另一级(即第5级)完成,同时,在该级之前,再安插一级(存储拜访).3.ARM处理器支撑的数据类型有哪些?答:(1)Byte 字节,8位;(2)Halfword 半字,16位;(3)Word 字,32位;4.写出ARM运用的各类工作模式和工作状况.答:(1)工作模式:详见下表:(2)工作状况:a.ARM:32位,这种状况下履行字对齐的ARM指令;b.Thumb:16位,这种状况下履行半字对齐的Thumb指令.5.ARM处理器总共有若干个存放器?个中哪个用做PC?哪个用做LR?答:(1)ARM处理器总共有37个存放器:31个通用存放器,6个状况存放器. (2)R15用做程序计数器PC,R14用做子程序链接存放器LR.6.假设R0=0x12345678,运用将R0存储到0x4000的指令存到存储器中,若存储器为大端组织,写出从存储器0x4000处加载一个字节到R2的指令履行后R2的值.答:因为0x4000是大端组织,所以R0存进后,0x4000中稀有0x56781234,从0x4000加载一个字节到R2后(由地位到高位加载),R2的值为0x34. 7.ARM920T处理器参加了哪两个协处理器?各自的重要功效是什么?答:ARM920T处理器参加了两个协处理器:(1)CP14,许可软件拜访调试通讯通道;(2)体系控制协处理器CP15,供给了一些附加存放器用于设置装备摆设和控制Caches.MMU.呵护体系.时钟模式和其他体系选项.8.ARM920T支撑哪些时钟模式?答:快速总线模式.同步模式.异步模式.9.什么是写直达和写回Cache操纵,各有何特点?答:(1)写直达:当CPU对Cache写射中时,Cache与主存同时产生写修正.长处:一致性好;缺陷:耗时.(2)写回:当CPU对Cache写射中时,只修正Cache的内容而不立刻写入主存,只当此履行被换出时才写回主存.长处:削减拜访主存次数,进步效力.缺陷:一致性差点.10.ARM为何集成了32位的ARM指令集和16位的Thumb指令集?(即它的利益)答:可供给长的转移规模.壮大的算术运算才能和大的寻址空间.11.什么是big-endian和little-endian,编写一段程序测试你所用的盘算机体系构造采取哪种存储机制?答:(1)大端存储体系(big-endian):低地址存放高字节,高地址存放低字节.小端存储体系(little-endian): 低地址存放低字节,高地址存放高字节.(2)int x=0x12345678;int *p=&x;if(*(char*)p=0x78)…little endianelse…big endian第4章 ARM体系硬件设计基本1.一个典范的可履行映像由哪几部分构成?答:2.汇编和C说话的互相挪用办法.答:(1)汇编程序挪用C程序的办法为:起首在汇编程序中运用IMPORT伪指令事先声明将要挪用的C说话函数;然后经由过程BL指令来挪用C函数.(2)C程序挪用汇编子程序的办法为:起首在汇编程序中运用EXPORT伪指令声明被挪用的子程序,暗示该子程序将在其他文件中被挪用;然后在C程序中运用extern症结字声明要挪用的汇编子程序为外部函数. (填补)3.基于ARM的硬件启动流程?答:(1)分派中止向量表;(2)初始化存储器体系;(3)初始化各工作模式下的客栈;(4)初始化有特别请求的硬件模块;(5)初始化用户程序的履行情况;(6)切换处理器的工作模式;(7)挪用主运用程序.第5章基于S3C2410的体系硬件设计1.温习控制:P230 I/O口编程实例.填补:2.中止的处理流程?答:(1)保管现场;(2)模式切换;(3)获取中止源;(4)中止处理;(5)中端返回,恢复现场.3.中止存放器的感化及相干的操纵?P235-237.。
过程装备关键测试参数
过程装备关键测试参数可以根据不同的装备类型和使用场景有所差异,但一般包括以下几个方面:
1. 压力/温度:对于压力容器、管道和化学反应设备等,测试其能否承受预期工作条件下的压力和温度。
2. 流量/负荷:对于泵、风机、发电机组和传动设备等,测试其在不同负荷下的流量、流速、功率和转速等指标。
3. 响应时间:对于自动化控制系统和机械反应设备等,测试其响应时间和稳定性,以确保其能够及时、准确地响应输入信号或工艺条件的变化。
4. 耐久性:对于机械设备、电子设备和耐腐蚀材料等,测试其在长时间使用过程中的耐久性和稳定性,以评估其寿命和可靠性。
5. 精度/准确性:对于仪器仪表和数据采集系统等,测试其测量精度、准确性和重复性,以确保其能够提供可靠的测试结果。
6. 安全性:对于高温高压设备、易燃易爆设备和防护设备等,测试其安全性能,以确保操作人员和环境的安全。
7. 骨架:对于重型机械设备和结构件等,测试其承重能力和稳定性,以确保其能够承受预期负荷和不同工况下的振动和冲击。
8. 能效:对于能源设备和能源系统等,测试其能效指标,以评估其节能和环保性能。
这些测试参数旨在评估过程装备的性能、可靠性、安全性和经济性等关键指标,以确保其能够在预期工作条件下正常运行,并满足使用者的需求和要求。
过程装备与控制工程多功能综合实验台实验指导书V3.0北京化工大学机电工程学院前言化工设备与机械专业是工科高校的一个传统专业,曾培养出了许多优秀的专业技术人才,为国家的经济建设,特别是石油化学工业的建设和发展作出了突出贡献。
随着改革开放的深入、工业结构的调整、新知识、新技术不断涌现,需要对传统的化工设备与机械专业进行改革,为此,从1999级起,全国“化工设备与机械”专业改为“过程装备与控制工程”专业,并增设了有关控制方面的课程,其目的是向21世纪培养知识面广、创新能力强、综合素质高的大学生。
为达到这一目的,专业实验的内容也必须进行相应改革。
为适应“过程装备与控制工程”专业对本科生的培养要求,专业实验的改革应遵循拓宽学生知识面、提高学生动手能力和创新能力的原则。
为此我们在北京化工大学和北京市教委支持下,在原化工设备与机械专业实验的基础上,结合新专业的特点,研制开发了过程设备与控制多功能综合实验台。
这是一套实用性很强的实验装置,它不仅能够满足本科生教学实验的要求,还为包括换热器的结构设计、性能检测、微机自动控制在内的多方面科研工作提供硬件及软件平台。
实验台在硬件和软件方面涉及到了变频控制技术;压力、温度、流量、转速及转矩的测试技术;微机数据采集技术;过程控制技术;以及微机通讯技术等,是比较典型的集过程、设备及控制于一体的综合实验装置。
本实验指导书是针对过程设备与控制多功能综合实验台所开设的十几个本科教学实验编写的。
在编写过程中姚琳、魏冬雪、张伟等同学先后参加了部分计算和编程工作,在此表示感谢。
由于编者水平有限,编写时间仓促,书中难免存在不少缺点和错误,热忱希望广大教师和同学在使用中批评指正。
编者2010年3月目录1 过程设备与控制多功能综合实验台简介2 过程设备与控制实验指导书实验一离心泵性能测定实验实验二离心泵汽蚀性能测定实验实验三调节阀流量特性实验实验四换热器换热性能实验实验五流体传热系数测定实验实验六换热器管程和壳程压力降测定实验实验七换热器壳体应力测定实验实验八离心泵压力控制实验实验九离心泵流量控制实验实验十换热器串级温度控制实验3 计算示例3.1离心泵扬程、轴功率及效率的计算示例3.2换热器壳体应力的实验测定和理论计算3.3热量Q t和热损失ΔQ的计算示例3.4总传热系数K的计算示例3.5换热器管程、壳程压力降计算4 计算机数字直接控制DDC控制算法说明4.1模糊算法模块程序说明4.2数字PID控制算法程序说明1 过程设备与控制多功能综合实验台简介过程设备与控制多功能综合实验台由动力系统(电机和多级泵)、换热系统、加热系统、数据采集系统、测试系统以及控制系统等组成。

工业机器人的技术要求工业机器人是以计算机控制系统为核心,具备感知、决策、执行等能力的自动化装置。
随着科技的不断进步和应用的推广,工业机器人在生产制造领域发挥着越来越重要的作用。
为了确保工业机器人在生产过程中能够提高效率、减少成本、提高品质和安全性,对其技术要求也越来越高。
以下是关于工业机器人的技术要求的一些重要方面:1. 精度和重复性:工业机器人需要具备高精度和重复性,以保证生产过程中的稳定性和一致性,以及产品的质量。
机器人执行动作的精度应在正负几个微米范围内,并且能够持续保持这样的精度。
2. 动作速度和灵活性:工业机器人需要具备较高的运动速度和灵活性,能够在短时间内完成各种复杂的动作。
机器人的速度应适应不同的生产节奏,并且能够实现复杂路径的规划和跟踪。
3. 感知和控制:工业机器人需要具备感知环境和控制自身动作的能力,以应对复杂的生产环境和任务需求。
机器人需要具备传感器来感知外部环境,并且能够通过计算机控制系统对动作进行实时调整和优化。
4. 安全性:工业机器人在操作过程中需要保证人员的安全。
机器人需要具备防碰撞系统和安全控制系统,以避免与人员或其他物体发生碰撞,并保障操作人员的安全。
5. 编程和控制界面:工业机器人需要具备简洁易用的编程和控制界面,以方便操作人员进行编程和控制。
同时,机器人的编程和控制系统应具备较高的稳定性和可靠性,以确保机器人能够稳定运行。
6. 成本效益:工业机器人的成本也是一个重要的考虑因素。
机器人的制造成本和维护成本应适中,不仅能够满足生产需求,还能够带来良好的经济效益。
7. 人机协作能力:工业机器人也需要具备与人员协作的能力。
机器人需要能够与操作人员进行有效的沟通和协调,以实现更高效的生产。
总之,工业机器人的技术要求需要包括精度、重复性、动作速度、灵活性、感知和控制、安全性、编程和控制界面、成本效益和人机协作能力等方面。
这些要求能够提高工业机器人的工作效率、安全性和经济效益,使其成为生产制造领域的重要装备。
单警执法视音频记录仪及采集站系统方案浙江大华技术股份有限公司2013年3月1.系统总体概述本系统主要是对目前城市治安监控的一个移动式监控及执法的补充,也是城市治安监控管理里面非常重要的一个组成部分。
目前城市治安大多以固定监控为主,实现对固定目标或一个有限监控区域的视频监控,这样不可避免地存在盲点,使犯罪分子抱着侥幸心理有机可乘,破坏城市治安环境、威胁到人民生命财产安全。
本单兵执法系统的应用,使得公安巡警和执勤民警在执行治安任务时,可以记录执法过程信息,及时的跟上级指挥部门进行信息沟通,使得上级领导和监控中心能实时了解一线治安执法现状等情况,有利于重要治安事件的快速决策。
本系统由执法取证仪终端、执法记录仪数据自动采集站、中心应用管理平台等组成,整体系统架设在公安网内,执法人员在现场执法时佩戴执法记录仪终端对执法情况进行视频和音频现场录制,并将相应数据采集到相应平台,实现分级管理。
2.需求分析单兵执法取证系统是公共安全技术防范系统的重要组成部分,可以广泛地应用于交通管理、预防和制止犯罪、解决纠纷、处理治安和刑事案件等领域,为公安侦察破案提供线索证据等方面有着其它防范设施难以发挥的作用。
公安机关各个部门、各种业务对单兵执法取证系统的应用需求也日益增长,可以说,单兵执法取证系统是提升公安机关管理社会、治安防控、打击犯罪、维护稳定、保障安全的重要手段和依靠。
3.系统结构与功能设计3.1系统总体架构图执法视音频数据传输存储到执法记录仪数据自动采集站实现压缩和存储,通过中心应用管理平台可对设置在各大、中队的执法记录仪数据自动采集站进行设备管理和资料管理,同时利用中心管理平台的各应用模块,实现支队、大队、中队三级应用管理、各类信息的管理与维护、公安网WEB的登录与访问、流媒体资料的在线播放、影音资料的远程传输、数据统计分析等功能。
3.2系统建设内容本期将建设600个单警执法视音频记录仪,分60个区域,需要约60个采集站,覆盖萧山区公安局下属各个单位,实现全区民警的执法记录。
最新电大《机电一体化系统设计基础》形考作业任务01-05网考试题及答案最近XXX的《机电一体化系统设计基础》形考作业任务01-05网考试题及答案已经100%通过了。
考试共有5个任务,其中任务1至任务4是客观题,任务5是主观题。
任务1至任务4需要在考试中多次抽取试卷,直到出现01任务_0001、02任务_0001、03任务_0001、04任务_0001试卷为止,然后按照该套试卷答题。
在做考题时,可以利用本文档中的查找工具,把考题中的关键字输入到查找内容框内,就可以迅速查找到该题的答案。
此外,本文库还有其他教学考一体化答案,敬请查看。
任务101任务_0001一、判断题(共10道试题,共40分。
)1.齿轮传动的啮合间隙会造成一定的传动死区,若在闭环系统中,传动死区会使系统产生低频震荡。
B.正确2.为减少机械传动部件的扭矩反馈对电机动态性能的影响,机械传动系统的基本固有频率应低于电气驱动部件的固有频率的2~3倍,同时,传动系统的固有频率应接近控制系统的工作频率,以免系统产生振荡而失去稳定性。
B.正确3.系统的静摩擦阻尼越大,使系统的回程误差增大,定位精度降低。
B.正确4.进行机械系统结构设计时,由于阻尼对系统的精度和快速响应性均产生不利的影响,因此机械系统的阻尼比ξ取值越小越好。
A.错误5.采用虚拟样机代替物理样机对产品进行创新设计测试和评估,延长了产品开发周期,增加了产品开发成本,但是可以改进产品设计质量,提高面向客户与市场需求能力。
B.正确6.自动控制是在人直接参与的情况下,通过控制器使被控对象或过程自动地按照预定的规律运行。
B.正确7.信息处理技术是指在机电一体化产品工作过程中,与工作过程各种参数和状态以及自动控制有关的信息输入、识别、变换、运算、存储、输出和决策分析等技术。
B.正确8.滚珠丝杠垂直传动时,必须在系统中附加自锁或制动装置。
B.正确9.在滚珠丝杠螺母间隙的调整结构中,齿差式调隙机构的精度较高,且结构简单,制作成本低。
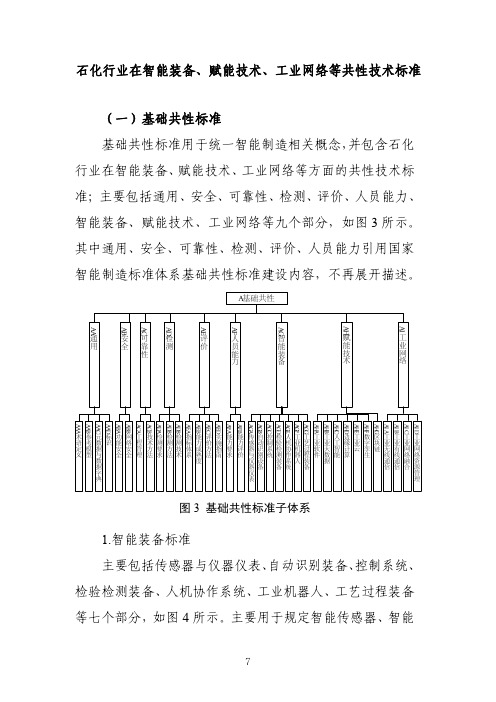
(一)基础共性标准基础共性标准用于统一智能制造相关概念,并包含石化行业在智能装备、赋能技术、工业网络等方面的共性技术标准;主要包括通用、安全、可靠性、检测、评价、人员能力、智能装备、赋能技术、工业网络等九个部分,如图3所示。
其中通用、安全、可靠性、检测、评价、人员能力引用国家智能制造标准体系基础共性标准建设内容,不再展开描述。
A基础共性AA通用A AB 参考模型AAC元数据与数据字典AAD标识ABA功能安全ABB网络安全AB安全AEB能力成熟度AEC评价方法AED实施指南AEA指标体系AE评价AC可靠性ACA工程管理ACB技术方法A A A 术语定义AD检测ADA检测要求ADB检测方法AGE人机协作系统AGF工业机器人AGG工艺过程装备AGD检验检测装备AG智能装备AH赋能技术AHA工业软件AHB工业大数据AHC人工智能AHF数字孪生AHD边缘计算AHG区块链AHE工业云AI工业网络AIA工业无线通信AIB工业有线通信AIC工业网络融合AID工业网络资源管理ADB检测技术AF人员能力AFA能力要求AFB能力评价AGB自动识别设备AGC控制系统AGA传感器与仪器仪表图3基础共性标准子体系1.智能装备标准主要包括传感器与仪器仪表、自动识别装备、控制系统、检验检测装备、人机协作系统、工业机器人、工艺过程装备等七个部分,如图4所示。
主要用于规定智能传感器、智能石化行业在智能装备、赋能技术、工业网络等共性技术标准7仪表、工艺过程装备、工业机器人等智能装备的数据字典、通信协议、接口、集成和互联互通、优化等技术要求,解决生产过程中智能装备之间,以及智能装备与物流系统、检测系统、工业软件、工业云平台之间数据共享和互联互通的问题。
通用装备的相关标准引用国家智能制造标准体系中的智能装备标准,本部分只对面向石化行业复杂环境的专有装备标准展开描述。
A G E人机协作系统A G F工业机器人A G G工艺过程装备A G D检验检测装备 A G B自动识别设备A G C控制系统A G A传感器与仪器仪表A G 智能装备图4智能装备标准子体系(1)传感器与仪器仪表标准主要包括面向石化复杂生产过程中的微型化、智能化、低功耗传感器的数据编码与交换、系统性能评估等通用技术标准;温度、压力、流量、在线分析等智能仪器仪表的采集、分析、自诊断等接口、通信、集成标准。
铁路门式起重机集装箱偏载监控的实践刘庆渔【摘要】为确保集装箱运输安全,对集装箱实施超偏载检测.通过对铁路门式起重机普通集装箱吊具吊运集装箱作业过程中的集装箱偏斜角度等状态数据进行实时采集和分析,将数据通过无线传输至监测预警中心,对造成集装箱倾斜的原因进行智能识别,分级判定集装箱倾斜状态并做出相应预警及联动处理,可以实现对吊装作业的集装箱偏载量、F-TR锁脱钩情况的实时监测,将防范关口前移,保证运输安全.【期刊名称】《铁道货运》【年(卷),期】2016(000)011【总页数】5页(P37-41)【关键词】门式起重机;集装箱;偏载;检测技术;监控方法【作者】刘庆渔【作者单位】北京铁路局北京装卸管理部,北京100045【正文语种】中文【中图分类】U294.3;TH213.5集装箱运输具有货物运输安全、简化货物包装、提高作业效率、便于多式联运、易实现“门到门”运输等优点,方便实现现代化管理,在铁路运输中占有越来越大的比重[1]。
但是,集装箱运输中的超载、偏载现象会给运输安全带来一定影响。
一旦集装箱出现超偏载,当其装上列车后,负重车辆重心在横向或纵向偏移超限,形成安全隐患,易引发列车脱轨或翻车的严重事故。
为确保安全运输,必须在源头实施控制,即对集装箱进行超偏载检测。
目前,国内尚无关于铁路门式起重机采用无动力集装箱吊具装卸集装箱作业监测及控制集装箱偏载的完整、高效、可行的解决方案,无可借鉴和效仿的资源和案例。
此外,动态测量及补偿技术、状态传感器设计技术、数字无砝码标定、嵌入式系统开发技术及移动无线技术在监控集装箱偏载系统上的集成应用,也属于国内外的前沿技术领域。
随着铁路货运向现代物流的转型发展,集装箱运输成为铁路货运增量的一个突破点[2],同时各种安全和效率的瓶颈给集装箱作业带来挑战,特别是在繁忙的集装箱运输作业点,对设备和流程进行改进的需求非常突出。
(1)集装箱偏载的安全隐患问题。
目前集装箱装卸作业中的偏载情况一般通过地面设备进行测量,存在二次搬捣,作业繁琐,费时、费力,影响作业效率。
收稿日期:2002 08 05作者简介:黄志勇(1978 ),男,江西南昌人,硕士生,研究方向为便携式数据采集系统的开发与研制。
过程装备中数据采集系统的低功耗设计黄志勇,邹久朋(大连理工大学过程装备与控制工程系,辽宁大连116012)[摘 要] 从理论分析和实际应用两个方面阐述和讨论了低功耗大容量便携式数据采集仪的研制方案。
主要从芯片的选型、外围电路的设计、软件设计等方面入手来分析如何使电池供电的数据采集系统长时间工作于无人看管的场所。
[关键词] 单片机;低功耗;外围电路;数据采集[中图分类号]TM911 [文献标识码]A [文章编号]1000 0682(2003)01 0034 03The Low dissipation design of a data acqusition system in process equipmentHUANG Zhi yong,ZOU Jiu Peng(Proc ess Equi pment &Cont rol Engineering De pt o f DaLian U niversity o f Tec hnology ,Liaoning Dalian 116012,China )Abstract:This paper expatiates on the method of designing a portable and large capacity microcontroller system with low power dissipation and discusses its development through both theoretic analysis and actual ap plications.Proceeding from the circuits,design,components and selection to software configuration,the paper analyses how the design conception can realize the function that keeps the battery operated data acquisition sys tem working for a long time at its working field without tenders.Key words:Microcontroller;Lo w power dissipation;Peripheral circuit;Data acquisition1 前 言由单片机组成的数据采集系统已经广泛的应用在过程装备的各个领域。
通常在野外偏远地区、高温高压场所要进行压力、温度和应力等的数据采集时,由于没有持续的电力供给,而且工作温度有限制,不太适合使用笔记本电脑等设备进行数据采集,只能使用电池供电的数据采集系统。
而一般情况下数据采集需持续几天到几个月,这样整个系统的功耗成为影响系统设计的关键问题。
2 低功耗的硬件设计在实际应用中数据采集系统主要由传感器、A/D 转换器、单片机、存储器、与微机接口电路等组成。
除传感器外,设计人员基本上是选用低功耗C MOS 或HCMOS 型工艺制造的IC 。
而CMOS 电路的功耗由静态功耗(Ps )和动态功耗(Pd )组成。
静态功耗是在电路的所有输入信号保持状态不变时的直流功耗。
它包括PN 结反向漏电流引起的功耗和MOS 晶体管的亚阈电流引起的功耗。
由于它一般在微安( A)量级[1],可以忽略。
动态功耗是C MOS 电路在正常操作时所消耗的能量。
它一般在毫安级(mA)。
所以在低功耗设计时,应尽量减少动态功耗。
动态功耗Pd 是对电路节点负载电容进行充放电所消耗的功率。
表示为:Pd =RC L V L V dd f (2 1)式中:C L 负载电容;V L 逻辑摆幅;V dd 电源电压;f 工作频率;R 能量状态转换活动几率。
R 又简称 开关活动率 ,它是指节点一个周期内做耗能状态转换所用的时间与时钟周期之比,它的大小与电路结构、逻辑功能、输入数据的组合状态及节点的初始状态有关。
一般情况下C MOS 电路的逻辑摆幅V L 与电源电压V dd 近似,故(2 1)式可简化为:P d =RC L V 2ddf (2 2)由上式可知,降低动态功耗的主要途径是:降低耗能状态转换活动几率、减少负载电容、降低工作电34 工业仪表与自动化装置 2003年第1期压、降低工作频率。
这与低功耗设计的三相宜原则(电源宜低不宜高、时钟宜慢不宜快、系统器件宜静不宜动)的概念相符[2]。
下面从几方面来考虑数据采集系统的IC选择和电路设计的问题。
2 1 单片机的选择以HC MOS单片机为核心构成设备的电路系统是低功耗设计的关键。
现在设计人员已经可以选用许多工作电压低于5V的单片机,根据公式(2 2)可知,动态功耗与工作电压的平方成正比。
假设电路完全相同,单片机工作电压为3 3V的系统比5V系统节省56%的功耗,电压若降到2 2V,功耗将降低80%以上。
例如MC68H05单片机的工作电压可降至3V,83CL401单片机可降至1 5V。
从工作频率上考虑,在满足数据采集速度要求的情况下,单片机的工作频率应尽量低,根据公式(2 2),低的工作频率不仅能使单片机和外围电路的工作频率(f)下降,而且使得能量状态转换活动几率(R)下降。
多数情况下可以选择4MHz或6MHz作为单片机的工作频率。
此外,考虑到51系列单片机的掉电模式和低功耗的闲置模式、PIC系列单片机的睡眠省电(Sleep)状态等单片机的低功耗状态,在系统设计时应尽量使单片机处在低功耗状态,只在其进行数据采集和处理时才将其从待机的工作状态唤醒。
例如,PIC16C54单片机待机工作状态下的功耗是程序运行状态下的0 5%,不足50 W。
随着高集成度的完全单片化设计思想的发展,许多公司的单片机将很多外围硬件集成到了CPU 芯片中。
内部以低功耗、低电压的原则设计,这给单片机的低功耗设计提供了强有力的支持。
比如:TI 公司的MSP430系列单片机,其内部集成了10位以上的单斜率AD转换器、LC D驱动器等。
但是工作电压却很低,如MSP430x13x工作电压范围为1 8V ~3 6V,当工作电压为2 2V,时钟频率为1MHz,工作电流只有250 A,等待工作方式工作电流为1 3 A,在RAM关闭的低功耗模式中,工作电流更加低到了0 1 A。
我们在系统设计时可综合成本、系统功能需求等多方面因素进行考虑。
2 2 外围器件的选择数据采集系统的外围器件的选择根据实际工况的要求不同而有所区别。
但是一般来说都应当包括传感器、AD转换器、数据存储器和其他一些辅助电路。
随着集成电路制造工艺的不断发展,存储器已经由原来功耗较大的NMOS器件发展到现在的HC MOS器件。
使用HC MOS工艺制造的存储器已成为主流。
现在存储器的工作方式也有并行、串行两种,同时常用的EE PROM也正在向闪速存储器过渡[3]。
主流闪速存储器厂家已采用0 18 m,甚至0 15 m 的制造工艺。
先进的工艺技术决定低电压的特性,从最初12V的编程电压,一步步下降到5V、3 3V、2 7V、1 8V单电压供电,这符合公式(2 2)提出的降低工作电压来降低动态功耗的设计要求。
从表2 1可知NMOS型存储器较CMOS型存储器的功耗大一个数量级,而闪存与EEPROM功耗相当,且可在低电压下进行快速读写,其优势是显而易见的。
表2 1 存储器的功耗型 号工作电流(mA)备用电流(mA)27641002027C64301272561004027C25630128641407028C64300 128C256500 2AT29C010500 1AT29C020400 1AT29C040A400 1X24C45100 0525C0130 15考虑到存储器实际写时间是很短的,每次读写时间大约为几百ns到几ms,相对于整个数据采集的时间来说只是小部分的时间,有必要使存储器保持在备用状态,进行读写时再将其激活。
由表2 1比较可看出备用电流相对工作电流来说是微乎其微的,这对电池供电的系统来说是十分必要的。
备用状态是指电源有效而片选信号无效时的状态,片选信号有效即进入读写状态。
以51型单片机来说,系统使用EEPROM,可以将它的OE与CE相连,用单片机的PSE N引脚驱动[4]。
这样只有在EEPROM进行读写操作时才会选中它进入工作状态,而其它的时间PSE N为高电平,EEPROM处在备用工作状态。
传感器的功耗在系统设计时是不可忽略的因素,尽量避免采用功耗大的,如磁电式、电容式等传感器。
AD转换器、地址锁存器等的选择根据低功耗352003年第1期 工业仪表与自动化装置的要求,应采用全C MOS 化设计。
C MOS 电路分为通用型CCD4000系列和MC14500系列、高速C MOS (54HC 系列和74HC 系列)及专用型3大类[5]。
其中74HC 系列的工作电压可以降低到2 0V,对进一步降低功耗大有益处。
高速CMOS 系列集成电路采用了先进的生产工艺,功耗比通用型集成电路高,但其工作速度比通用型集成电路快,驱动能力也比通用型强。
综合考虑优先选用高速CMOS 电路。
但要注意的是数据采集系统中的CMOS 集成电路空闲输入引脚不能悬空:由于C MOS 电路是电压控制器件,它的输入阻抗很高,如果输入引脚悬空很容易积累电荷,产生较大的感应电动势。
使输入引脚电位处于0、1之间的过渡区,使电路中的反响器P 沟道和N 沟道都处于导通状态,致使功耗增加。
处理方法是将未用引脚接地。
其它元器件的选取也要从低功耗设计的角度考虑,尤其是VMOS 场效应管,让其工作于开关状态,并减少其工作电流。
显示系统可选用静态的数码管或者低功耗的液晶显示器件。
图2 1 电源管理模块2 3 电源管理对于电池供电的系统来说,要在无人看管的恶劣工作环境下长时间工作而不更换电池,必须对电源进行有效的管理。
一般来说可将系统化分为若干子系统,对每个系统分时分区供电。
例如图2 1所示的电路。
利用实时时钟芯片X1228组成电源管理模块,在采集系统上电初始化时钟芯片后,通过I/O 口给JK 触发器CLK 引脚一个负脉冲,Q 引脚输出为低,三极管截止,采集系统断电。
由于空闲时时钟电路不断电,到设置的定时采集时间后,时钟芯片报警激活,中断输出端(IRG)输出一个低电平给C LK,使JK 触发器输出翻转,三极管导通,Vcc 给单片机上电复位。
之后,由单片机控制,导通模拟电路,启动传感器、AD 转换器等进行数据采集。
采集结束后,单片机保存采集结果,通过模拟I 2C 总线设置时钟芯片的下次采集中断时间,最后控制触发器CLK 引脚使三极管截止。