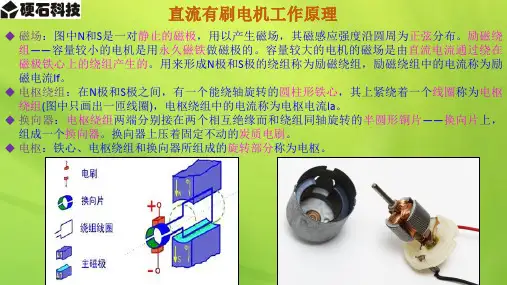
换向器:电枢绕组两端分别接在两个相互绝缘而和绕组同轴旋转的半圆形铜片——换向片上, 组成一个换向器。换向器上压着固定不动的炭质电刷。
电枢:铁心、电枢绕组和换向器所组成的旋转部分称为电枢。
有刷电机定子有两个磁极,小电机直接使用永磁体做励磁磁场,大功率电机用励磁线圈 产生的电磁铁。
使用三极管或者MOS管搭建的H桥驱动电路,可以实现有刷电机速度和方向控制。
电机按一定方向转动时,3个霍尔的输出会按照6步的规律变化,见图
结合之前介绍的BLDC六步控制,在每个霍尔信号都对应一个BLDC控制步,使得BLDC旋 转一个角度,这样可以制作下表:
特别注意,一般BLDC厂家都会给出一个霍尔传感器和绕组得电情况对应关系表,不一定跟上面 两个表都完全对应一致,但是原理分析都是一致的。
然后,MOS管驱动IC这里用到IR2110S。R2110芯片体积小(SOIC-16),集成度高(可驱动同 一桥臂两路),响应快( ton /tof = 120/94 n s ),偏值电压高(<600 V ),驱动能力强,内设
欠压封锁,而且易于调试,并设有外部保护封锁端口。尤其是上管驱动采用外部自举电 容上电,使得驱动电源路数目较其他IC驱动大大减小。对于BLDC驱动需要6个桥臂,需 要用到3片IR2110S来驱动,虽然如此也是仅需要一路10~20V电源,从而大大减小了控制 变压器的体积和电源数目,降低了产品成本,提高了系统的可靠性。 NMOS管的导通基本条件就是VGS大于一定的阈值电压VGS(th),IRF540的VGS(th)是4V(最 大值)。我们为IR2110S设计的电源电压为15V,IR2110S的低端驱动,即驱动Q6的IRF540, 很容易就实现NMOS管驱动条件。对于高端驱动,即驱动Q5的IRF540,就需要“自举电 路”的支持,自举电路通俗点就是升压电路,电路中的D7二极管和C13电容用于自举电 路,简单来说在该电路中,自举电路的作用是使得IR2110S高端驱动,即IR2110S的第8引 脚HO输出信号可以满足大于VGS(th) 。