卫星控制系统全物理仿真
- 格式:pdf
- 大小:573.98 KB
- 文档页数:6


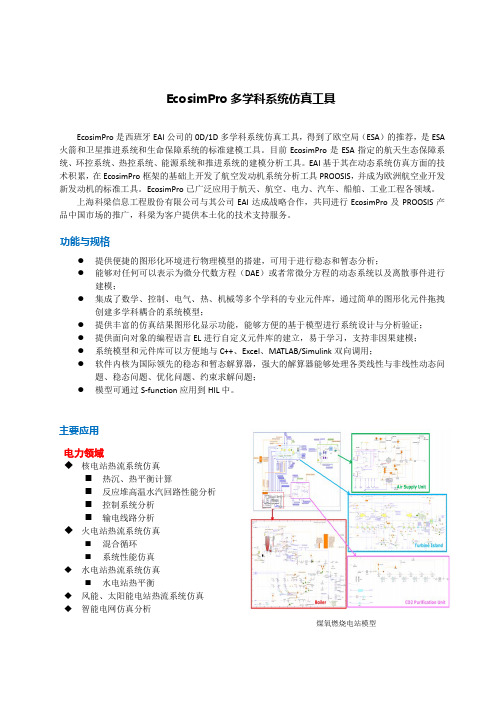
EcosimPro 多学科系统仿真工具主要应用EcosimPro 是西班牙EAI 公司的0D/1D 多学科系统仿真工具,得到了欧空局(ESA )的推荐,是ESA 火箭和卫星推进系统和生命保障系统的标准建模工具。
目前EcosimPro 是ESA 指定的航天生态保障系统、环控系统、热控系统、能源系统和推进系统的建模分析工具。
EAI 基于其在动态系统仿真方面的技术积累,在EcosimPro 框架的基础上开发了航空发动机系统分析工具PROOSIS ,并成为欧洲航空业开发新发动机的标准工具。
EcosimPro 已广泛应用于航天、航空、电力、汽车、船舶、工业工程各领域。
上海科梁信息工程股份有限公司与其公司EAI 达成战略合作,共同进行EcosimPro 及PROOSIS 产品中国市场的推广,科梁为客户提供本土化的技术支持服务。
电力领域◆核电站热流系统仿真 ⏹热沉、热平衡计算 ⏹反应堆高温水汽回路性能分析 ⏹控制系统分析 ⏹输电线路分析 ◆火电站热流系统仿真 ⏹混合循环 ⏹系统性能仿真 ◆水电站热流系统仿真 ⏹水电站热平衡◆风能、太阳能电站热流系统仿真 ◆智能电网仿真分析 功能与规格 ●提供便捷的图形化环境进行物理模型的搭建,可用于进行稳态和暂态分析;●能够对任何可以表示为微分代数方程(DAE )或者常微分方程的动态系统以及离散事件进行建模;●集成了数学、控制、电气、热、机械等多个学科的专业元件库,通过简单的图形化元件拖拽创建多学科耦合的系统模型;●提供丰富的仿真结果图形化显示功能,能够方便的基于模型进行系统设计与分析验证; ●提供面向对象的编程语言EL 进行自定义元件库的建立,易于学习,支持非因果建模; ●系统模型和元件库可以方便地与C++、Excel 、MATLAB/Simulink 双向调用;●软件内核为国际领先的稳态和暂态解算器,强大的解算器能够处理各类线性与非线性动态问题、稳态问题、优化问题、约束求解问题; ●模型可通过S-function 应用到HIL 中。

基于三轴气浮台的卫星姿态控制系统物理仿真刘超;何平;李岐;华楠【摘要】为了达到保证气浮平台安全性和协助重心调节系统的目标,设计了一套基于三轴气浮台的卫星姿态物理仿真的举升控制系统,实现了对气浮台安全性和方便性能的改善。
介绍了该举升控制系统的原理方案,对系统的总体结构进行了设计,以TMS320F2812为主控芯片设计了系统的硬件电路,其中主要包括各个模块的功能及系统的工作流程,进行了举升控制系统的软件算法设计。
实验结果表明,该系统能够满足控制要求,实现了对性能的改善,具有响应快、精度高、可靠性强等特点,功能和指标都达到了设计要求。
%In order to achieve the control goalof ensuring air-floating platform security and assisting gravity control system, the lifting control system of satellite attitude control system based on three-axis air-floating platform was designed to realize the improvement of the performance.Firstly, the principle and scheme of the lifting control system was presented. The overall structure of the system and the hardware circuit of the system was designed using TMS320F2812 as main control chip.It mainly consisted of the function of each moduleand the working process of the system.The software algorithm of the control system was presen-ted.With the experimental verification, the system met the control requirements and realized the improvement of the performance, and it also had advantages of fast response, high preci-sion and strong resistance to interference.The functions and indexes achieved the design re-quirements.【期刊名称】《哈尔滨商业大学学报(自然科学版)》【年(卷),期】2015(000)001【总页数】4页(P65-68)【关键词】气浮台;物理仿真;举升控制;DSP【作者】刘超;何平;李岐;华楠【作者单位】哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001;哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001;哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001;哈尔滨工业大学航天学院控制科学与工程系,哈尔滨150001【正文语种】中文【中图分类】TP294随着航天航空工程的不断深入发展,我国航天领域的科学技术迅猛进步,对姿态稳定指向或跟踪控制能力要求越来越高,系统功能更加复杂.作为空间飞行器全物理仿真的核心设备,气浮台的研究工作已经成为目前航天控制领域研究的重要方向[1].在国外,各研究单位和企业部门对于气浮台的研究是伴随着对于卫星的研制而开始的,目前发展比较成熟.而国内的基于气浮台的卫星全物理仿真的研究相比较国外而言起步晚,发展较慢,虽然说也取得了一定的成就,特别是近年来,气浮台的研制取得了长足的进步,但仍然有待改进,由于受技术条件限制,并没得到广泛的应用,因此仅用于航天工程领域的仿真试验中[2].本文基于TMS320F2812设计了基于三轴气浮台的卫星姿态仿真系统的举升控制系统,又称为安全辅助系统,以达到保证平台安全性和协助重心调平的目的.卫星全物理仿真的目的是提高卫星在轨运行的可靠性,减少卫星姿态失控的风险[3].为了平衡掉卫星姿态动力学对象的重力进而模拟太空环境,气浮台采用一个球面气浮轴承,提供三自由度微干扰力矩悬浮.气浮台的举升控制系统结构图如图1所示.从结构形式上看,举升控制系统分为:举升控制主板、电动执行器和无线通讯模块.其中,电动执行器由伺服电机驱动器和伺服电机组成.对于基于三轴气浮台的卫星姿态物理仿真系统,气浮平台在浮起的时候提供三个自由度,如有外力作用,或重心发生偏移,极有可能造成倒台,因此安全辅助子系统的作用显得尤其重要.举升控制系统电动立柱上的传感器获取力测量值,通过无线通讯模块将所得信息传递给电子控制器,在设定的控制算法的作用下,计算出合适的控制量来驱动电机,以达到精准控制气浮台升降的目标,并协助重心调节系统工作[4].系统主要由举升控制计算机、举升控制主板、电动执行器、无线通讯模块和限位开关五部分组成.系统的总体结构如图2所示.气浮台举升控制计算机,即上位机,是整个系统的监控平台,采用工控机来实现,为测试系统提供友好的人机交互界面,通过测量数据、分析数据和设定参数,得到举升台面的相应参数.气浮台举升控制主板,即下位机,是整个系统的控制核心,根据用户的给定命令值,结合各传感器反馈的数据,按照设定算法,发出相应的控制指令.举升控制系统的电动执行器推力可以克服最大可能重量偏心,当需要的时候,执行器动作,使平台归位,在正常工作时,处于收缩状态,平台在工作范围内自由转动.力传感器安装在执行器顶端,测量压力值,可以粗调系统的平衡,以及平台需要倾斜时,通过执行器伸长达到控制台面升降的目的.举升控制系统还包括限位机构,其中包括顶部限位和底部限位,作用是保护台架不至于翻滚.系统的控制电路结构框图如图3所示.3.1 系统主控制器单元采用德州仪器TI公司的TMS320F2812作为主控芯片,它具有强大的数字信号处理能力,片内集成了丰富的外设资源,为车身稳定控制系统的参数测量提供了极大的便利.考虑芯片的最小系统配置,该单元主要由以下几个模块组成:电源模块、JTAG模块、时钟模块、复位模块、晶振模块等[5].3.2 RAM存储器的扩展模块由于DSP主控芯片内部RAM容量有限,因此本主控系统对F2812进行了RAM存储器的片外扩展.本主控系统采用IS61LV12816作为片外RAM扩展芯片,它是一种高速的静态RAM,有17根地址总线,16根数据总线,其存储空间为, 由电源直接供电, 同时兼容TTL与CMOS电平,无时钟或刷新.3.3 伺服电机驱动模块伺服电机是指在伺服系统中控制机械元件运转的发动机,是一种变速装置.可使控制速度和位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象.其在自动控制系统中作为执行元件,具有机电时间常数小、线性度高等优点.选用安川电机制作所推出的小型交流伺服电动机和驱动器SGDV,采用位置控制的控制方式,输入信号为DSP主控芯片产生的指令脉冲,通过驱动器控制伺服电机运动,编码器采用增量式,即将位移转换成周期性的电信号,再把这个电信号转变成计数脉冲,用脉冲的个数表示位移的大小,本系统采用的伺服电机起动转矩大,运行范围较广,无自转现象,特别适合于控制领域[6].3.4 通信单元主控系统的通信单元主要用于控制电路和计算机之间的通信.由于工作环境的需要,系统采用无线通信模块,台上台下无线实时通讯,方便主控系统与操作台进行数据交换,具有建设工程周期短、适应性好和扩展性好的优点[7].系统的控制电路的软件部分运行于TMS320F2812中,软件开发平台为CCS3.3.程序主要以C语言完成[8-9],CCS是德州仪器TI公司所设计的一款针对DSP的开发软件,本设计使用该编程开发环境下的CCS3.3版本对主控系统的开发.用户通过CCS3.3进行程序编写、在线编译、调试等,其工作流程图如图4所示.气浮台的举升控制作为安全辅助系统,保证了在正常工作和失控情况下平台的安全性.在平台初始状态下,举升控制系统提供方便,达到控制台面升降的目的.另外,重心调节系统与安全辅助系统建为一体,成功地辅助重心调节系统进行了重心的调整.本文设计的基于三轴气浮台的卫星姿态物理仿真的举升控制系统,运用DSP技术实现了保证平台安全性和协助重心调节系统工作的目标.实验结果表明,举升控制系统作为卫星姿态仿真系统中重要的一部分,能够快速地做出响应,经济实用,明显提高了控制系统的精度,在全物理卫星仿真中具有独特的作用,具有很高的实用价值,对于三轴气浮台的研究与发展具有非常重要的意义.【相关文献】[1] 刘良栋. 卫星控制系统仿真技术[M]. 北京:宇航出版社,2003. 56-58.[2] 鲁兴举. 空间飞行器姿态控制仿真试验平台系统研究与设计[D].北京:国防科学技术大学,2005. 17-21.[3] 陈欢龙, 周军, 刘莹莹, 等. 三轴气浮台多体动力学建模与仿真[J]. 西北工业大学学报,2010,26(3): 332-337.[4] 李延彬, 包刚, 王祖温, 等. 三自由度气浮台自动平衡系统动力学建模[J]. 中国惯性技术学报, 2005, 21(5): 1-3.[5] Texas Instruments Incorporated. TMS320C28X系列DSP的CPU与外设(上)[M]. 张卫宁译.北京:清华大学出版社, 2005. 12-30.[6] 史孝文. 基于DSP的直流伺服电机控制系统研究开发[D]. 昆明:昆明理工大学,2005.[7] 任明荣. 短距离无线通信技术及其融合发展研究[J]. 电测与仪表,2007,44(502):44-49.[8] 孙丽明. TMS320F2812原理及其C语言程序开发[M]. 北京: 清华大学出版社, 2008. 15-19.[9] 王纯.高超声速飞行器上升段轨迹设计[J].哈尔滨商业大学学报:自然科学版,2014,30(6):728-731.。

航天飞行器导航与控制系统设计与仿真导语:航天飞行器是现代科技的巅峰之作,它的导航与控制系统是其正常运行和控制的核心。
本文将探讨航天飞行器导航与控制系统的设计原理、关键技术以及仿真模拟的重要性。
一、航天飞行器导航与控制系统设计原理航天飞行器的导航与控制系统设计原理主要包括三个方面,即姿态控制、导航定位和轨迹规划。
1. 姿态控制:姿态控制是指通过控制飞行器的各种运动参数,使其保持稳定的飞行姿态。
对于航天飞行器来说,由于外部环境的复杂性和飞行任务的特殊性,姿态控制尤为重要。
常用的姿态控制方法包括PID控制、模型预测控制和自适应控制等。
2. 导航定位:导航定位是指通过测量飞行器的位置和速度等参数,确定其在空间中的位置。
现代航天飞行器的导航定位通常采用多传感器融合的方式,包括惯性导航系统、卫星定位系统和地面测控系统等。
其中,卫星导航系统如GPS、北斗系统等具有广泛应用。
3. 轨迹规划:轨迹规划是指根据航天飞行器的飞行任务和外部环境的要求,确定其飞行轨迹和航线。
航天飞行器的轨迹规划需要考虑多个因素,如飞行器的运动特性、飞行任务的要求、空间障碍物等。
二、航天飞行器导航与控制系统的关键技术航天飞行器导航与控制系统设计离不开一些关键技术的支撑,其中包括:1. 传感器技术:传感器技术是导航与控制系统的基础,可以通过传感器对飞行器的姿态、速度、位置等进行准确测量。
陀螺仪、加速度计、GPS接收机等传感器设备的精度和稳定性对导航与控制系统的性能有着重要影响。
2. 控制算法:姿态控制和导航定位需要高效的控制算法来实现。
PID控制算法是常用的姿态控制方法,模型预测控制和自适应控制等算法则在一些特殊应用中得到了广泛应用。
对于导航定位,卡尔曼滤波和粒子滤波等算法可以很好地利用多传感器信息进行位置估计。
3. 轨迹规划算法:航天飞行器的轨迹规划需要考虑多个因素,如安全性、能耗等。
基于遗传算法和优化算法的轨迹规划方法可以在不同的约束条件下求解最优解。
一、实验题目卫星姿态控制物理仿真实验二、实验目的1、掌握飞行器姿态控制系统的光纤陀螺传感器和喷气执行机构、飞行器姿态模拟单轴气浮实验转台、数字信号处理器DSP控制器的功能、性能及应用方法;2、通过演示实验,掌握飞行器姿态控制物理仿真实验原理;3、掌握控制算法和DSP软件开发技术及用C语言在飞行器姿态控制物理仿真专业技术中的应用编程及实验方法。
三、实验任务1、以喷气装置作为执行机构,编写C语言,进行软件设计、编程和实验调试。
2、完成单轴陀螺定姿的转台闭环控制实验,进行姿态角机动20°的控制。
四、实验控制系统原理及框图图1 飞行器姿态控制实验转台系统框图单轴气浮实验转台控制系统原理主要是通过敏感器件(如陀螺,码盘等)测量转台姿态角及角速度等信息,通过DSP控制系统软件计算与理想(设定)状态的误差,并形成控制信息,操纵执行机构(如喷气装置,飞轮等),使转台回到设定位置。
五、控制算法及说明:喷气控制单回路姿态控制动力学方程为:dj T T J +=θ ,()00θθ=t ,()00θθ =t 式中,0θ、0θ 为姿态角、姿态角速度的初值,且00θθ =。
喷气推力器取为理想继电特性,并以线性姿态角θ作为反馈信号,当不计姿态角给定量(0=r θ)时,有控制方程0,0>-θj T()=t T j0,0<+θj T式中,0j T 为()t T j 的幅值。
系统的方框图如图2所示。
图2 喷气推理器取为理想继电特性的单回路姿态稳定系统方框图研究非线性控制系统常用的一种分析方法是相平面法,即在有姿态角θ和姿态角速度θ构成的直角坐标平面(相平面)上,研究θ与θ 间的运动轨迹(相轨迹),进而可获得关于系统过渡过程时间、超调量、极限环等主要姿控指标。
图3 理想喷气推理器的单回路姿态稳定系统的相轨迹图4 相平面法的DSP 实现原理图控制算法为0,≤+s U=U0,>-s U式中,U 为输出的控制量,f θ为角度预期值,M 为气浮转台的力矩,J 为气浮转台的转动惯量。
2024届湖南高考物理仿真模拟测试练习卷一、单项选择题(本题包含8小题,每小题4分,共32分。
在每小题给出的四个选项中,只有一项是符合题目要求的)(共8题)第(1)题如图所示,卫星A是2022年8月20日我国成功发射的遥感三十五号04组卫星,卫星B是地球同步卫星,若它们均可视为绕地球做匀速圆周运动,卫星P是地球赤道上还未发射的卫星,下列说法正确的是( )A.卫星A的运行周期可能为48hB.卫星B在6h内转动的圆心角是45°C.卫星B的线速度小于卫星P随地球自转的线速度D.卫星B的向心加速度大于卫星P随地球自转的向心加速度第(2)题以下四种情景中产生正弦交变电流的是( )A.图甲中矩形线圈绕与匀强磁场方向垂直的中心轴沿顺时针方向转动B.图乙中矩形线圈的一半放在具有理想边界的匀强磁场中,线圈按图示方向绕轴线匀速转动C.图丙中圆柱形铁芯上沿轴线方向绕有矩形线圈,铁芯绕轴线以角速度转动D.图丁中矩形线圈绕与匀强磁场方向平行的中心轴转动第(3)题下列能量条形图表示了一作自由落体运动的物体在释放处和下落至一半高度处,其动能和重力势能的相对大小关系,可能正确的是()A.B.C.D.第(4)题2020年7月23日12时41分,长征五号遥四运载火箭托举着我国首次火星探测任务“天问一号”探测器,在中国文昌航天发射场成功发射天问一号探测器将在地火转移轨道飞行约7个月后,到达火星附近,通过“刹车”完成火星捕获,进入环火轨道,并择机开展着陆巡视等任务,进行火星科学探测。
下列说法正确的是( )A.“7月23日12时41分”指的是时间间隔B.“7个月”指的是时刻C.“天问一号”从地球到火星的位移大小就是其运行轨迹的长度D.研究“天问一号”探测器在地火转移轨道飞行的轨迹时可以将探测器看成质点第(5)题物理学的发展丰富了人类对物质世界的认识,推动了科学技术的创新和革命,促进了物质生产的繁荣与人类文明的进步,下列说法中正确的是()A.开普勒通过对行星观测记录的研究发现了万有引力定律B.伽利略指出物体的运动需要力来维持C.卡文迪许测出了引力常量G的数值D.牛顿运动定律是自然界普遍适用的基本规律之一第(6)题某滑雪赛道如图所示,滑雪运动员从静止开始沿斜面下滑,经圆弧滑道起跳。