神经网络辨识
- 格式:ppt
- 大小:1.53 MB
- 文档页数:3
基于RBF神经网络的非线性系统对象辨识基于RBF(Radial Basis Function)神经网络的非线性系统对象辨识是一种用于建模和预测非线性系统行为的方法。
RBF神经网络是一种前向型神经网络,它由三层构成:输入层、隐层和输出层。
在非线性系统对象辨识中,首先需要收集系统的输入和输出数据,然后使用RBF神经网络进行模型的训练和辨识。
RBF神经网络的隐层由多个RBF神经元组成,每个神经元对应一个径向基函数。
径向基函数是一种以输入数据为中心的高斯函数,可以描述非线性系统的复杂特性。
训练RBF神经网络的过程包括两个阶段:初始化和迭代。
在初始化阶段,需要确定神经网络的参数,包括径向基函数的中心和宽度。
中心可以通过聚类算法确定,如K-means 算法。
宽度是径向基函数的扩展系数,可以是一个常数或一个向量。
迭代阶段是用于调整神经网络的参数,使得网络的预测输出尽可能接近实际输出。
这可以通过梯度下降法来实现,即通过最小化损失函数(如均方误差)来更新网络权重和偏置。
完成训练后,RBF神经网络可以用于预测非线性系统的输出。
给定新的输入数据,网络通过计算输入和神经元中心之间的距离来确定径向基函数的激活程度,然后将其加权求和,并加上偏置项,最终得到系统的输出。
基于RBF神经网络的非线性系统对象辨识具有以下优点:能够对复杂的非线性系统建模,高度灵活性和适应性,对噪声和不确定性具有鲁棒性。
它也存在一些挑战,如网络结构设计的困难和训练时间的长短等。
基于RBF神经网络的非线性系统对象辨识是一种有效的方法,可以用于建模和预测非线性系统的行为。
它在许多领域,如控制系统、金融市场预测和生物医学工程等方面都有广泛的应用前景。
神经网络在系统辨识中的应用摘要应用于自动控制系统的神经网络算法很多,特点不一,对于非线性系统辨识的研究有一定影响。
本文就BP网络算法进行了着重介绍,并点明了其收敛较慢等缺点,进而给出了改进算法,说明了建立在BP算法基础上的其他算法用于非线性系统辨识的可行性与有效性。
关键词神经网络BP算法;辨识;非线性系统前言神经网络是一门新兴的多学科研究领域,它是在对人脑的探索中形成的。
神经网络在系统建模、辨识与控制中的应用,大致以1985年Rumelhart的突破性研究为界。
在极短的时间内,神经网络就以其独特的非传统表达方式和固有的学习能力,引起了控制界的普遍重视,并取得了一系列重要结果。
本文以神经网络在系统辨识中的应用作一综述,而后着重介绍BP网络算法,并给出了若干改进的BP算法。
通过比较,说明改进算法具有诸多优点及用于非线性系统辨识[1]的可行性与有效性。
1 神经网絡用于系统辨识的原理及现状神经网络在自动控制系统中的应用已有多年。
目前,利用神经网络建立动态系统的输入/输出模型的理论及技术,在许多具体领域的应用得到成功,如化工过程、水轮机、机器入手臂、涡轮柴油发动机等。
运用神经网络的建模适用于相当于非线性特性的复杂系统[2]。
目前系统辨识中用得最多的是多层前馈神经网络[1]。
我们知道,自动控制系统中,一个单隐层或双隐层的具有任意数目神经元的神经网络,可以产生逼近任意函数的输入/输出映射。
但网络的输入节点数目及种类(延迟输入和输出)、隐层节点的个数以及训练所用的算法对辨识精度和收敛时间均有影响。
一般根据系统阶数取延迟输入信号,根据经验确定隐层节点数,然后对若干个神经网络进行比较,确定网络中神经元的合理数目。
现在用得较多的多层前馈神经网络的学习算法是反向传播算法(Back Propagation),即BP算法。
但BP算法收敛速度较慢,后面将会进一步讨论。
1.1 神经网络的结构感知器是最简单的前馈网络,它主要用于模式分类。
试论述神经网络系统建模的几种基本方法。
利用BP 网络对以下非线性系统进行辨识。
非线性系统22()(2(1)1)(1)()1()(1)y k y k y k u k y k y k -++=+++-1)首先利用u(k)=sin(2*pi*k/3)+1/3*sin(2*pi*k/6),产生样本点500,输入到上述系统,产生y(k), 用于训练BP 网络;2)网络测试,利用u(k)=sin(2*pi*k/4)+1/5*sin(2*pi*k/7), 产生测试点200,输入到上述系统,产生y(k), 检验BP/RBF 网络建模效果。
3)利用模型参考自适应方法,设计NNMARC 控制器,并对周期为50,幅值为+/- 的方波给定,进行闭环系统跟踪控制仿真,检验控制效果(要求超调<5%)。
要求给出源程序和神经网络结构示意图,计算结果(权值矩阵),动态过程仿真图。
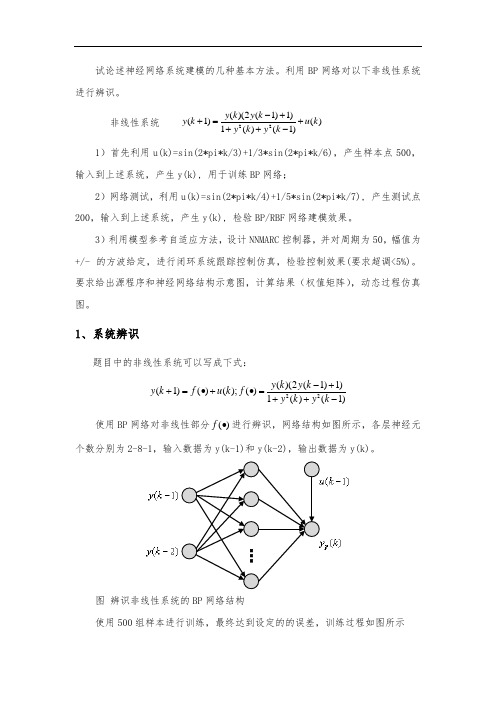
1、系统辨识题目中的非线性系统可以写成下式:22()(2(1)1)(1)()();()1()(1)y k y k y k f u k f y k y k -++=•+•=++- 使用BP 网络对非线性部分()f •进行辨识,网络结构如图所示,各层神经元个数分别为2-8-1,输入数据为y(k-1)和y(k-2),输出数据为y(k)。
图 辨识非线性系统的BP 网络结构使用500组样本进行训练,最终达到设定的的误差,训练过程如图所示图网络训练过程使用200个新的测试点进行测试,得到测试网络输出和误差结果分别如下图,所示。
从图中可以看出,相对训练数据而言,测试数据的辨识误差稍微变大,在±0.06范围内,拟合效果还算不错。
图使用BP网络辨识的测试结果图使用BP网络辨识的测试误差情况clear all;close all;%% 产生训练数据和测试数据U=0; Y=0; T=0;u_1(1)=0; y_1(1)=0; y_2(1)=0;for k=1:1:500 %使用500个样本点训练数据U(k)=sin(2*pi/3*k) + 1/3*sin(2*pi/6*k);T(k)= y_1(k) * (2*y_2(k) + 1) / (1+ y_1(k)^2 + y_2(k)^2); %对应目标值Y(k) = u_1(k) + T(k); %非线性系统输出,用于更新y_1if k<500u_1(k+1) = U(k); y_2(k+1) = y_1(k); y_1(k+1) = Y(k); endendy_1(1)=; y_1(2)=0;y_2(1)=0; y_2(2)=; y_2(3)=0; %为避免组合后出现零向量,加上一个很小的数X=[y_1;y_2];save('traindata','X','T');clearvars -except X T ; %清除其余变量U=0; Y=0; Tc=0;u_1(1)=0; y_1(1)=0; y_2(1)=0;for k=1:1:200 %使用500个样本点训练数据U(k)=sin(2*pi/4*k) + 1/5*sin(2*pi/7*k); %新的测试函数Y(k) = u_1(k) + y_1(k) * (2*y_2(k) + 1) / (1+ y_1(k)^2 + y_2(k)^2); if k<200u_1(k+1) = U(k); y_2(k+1) = y_1(k); y_1(k+1) = Y(k); endendTc=Y; Uc=u_1;y_1(1)=; y_1(2)=0;y_2(1)=0; y_2(2)=; y_2(3)=0; %为避免组合后出现零向量,加上一个很小的数Xc=[y_1;y_2];save('testdata','Xc','Tc','Uc'); %保存测试数据clearvars -except Xc Tc Uc ; %清除其余变量,load traindata; load testdata; %加载训练数据和测试数据%% 网络建立与训练[R,Q]= size(X); [S,~]= size(T); [Sc,Qc]= size(Tc);Hid_num = 8; %隐含层选取8个神经元较合适val_iw =rands(Hid_num,R); %隐含层神经元的初始权值val_b1 =rands(Hid_num,1); %隐含层神经元的初始偏置val_lw =rands(S,Hid_num); %输出层神经元的初始权值val_b2 =rands(S,1); %输出层神经元的初始偏置net=newff(X,T,Hid_num); %建立BP神经网络,使用默认参数 %设置训练次数= 50;%设置mean square error,均方误差,%设置学习速率{1,1}=val_iw; %初始权值和偏置{2,1}=val_lw;{1}=val_b1;{2}=val_b2;[net,tr]=train(net,X,T); %训练网络save('aaa', 'net'); %将训练好的网络保存下来%% 网络测试A=sim(net,X); %测试网络E=T-A; %测试误差error = sumsqr(E)/(S*Q) %测试结果的的MSEA1=sim(net,Xc); %测试网络Yc= A1 + Uc;E1=Tc-Yc; %测试误差error_c = sumsqr(E1)/(Sc*Qc) %测试结果的的MSEfigure(1);plot(Tc,'r');hold on;plot(Yc,'b'); legend('exp','act'); xlabel('test smaple'); ylabel('output') figure(2); plot(E1);xlabel('test sample'); ylabel('error')2、MRAC 控制器被控对象为非线性系统:22()(2(1)1)(1)()();()1()(1)y k y k y k f u k f y k y k -++=•+•=++- 由第一部分对()f •的辨识结果,可知该非线性系统的辨识模型为:(1)[(),(1)]()I p y k N y k y k u k +=-+可知u(k)可以表示为(1)p y k +和(),(1)y k y k -的函数,因此可使用系统的逆模型进行控制器设计。
![6.3 基于RBF神经网络的辨识 [系统辨识理论及Matlab仿真]](https://img.taocdn.com/s1/m/41e3af4aa216147916112830.png)
离散控制系统的系统辨识技术离散控制系统的系统辨识技术是在离散时间下对系统进行建模和参数估计的一种方法。
通过系统辨识技术,我们可以获取到系统的数学模型和参数,从而实现对系统的控制。
本文将介绍离散控制系统的系统辨识技术及其应用。
一、系统辨识的基本概念系统辨识是指通过实验和数据分析,推导出系统的数学模型和参数的过程。
在离散控制系统中,由于系统的输入和输出变量是按照离散时间采样得到的,因此需要采用特定的辨识方法进行处理。
常见的离散控制系统的系统辨识方法包括:参数辨识、经验模型辨识和神经网络辨识等。
参数辨识方法通过对系统的输入-输出数据进行数学建模和参数估计,得到系统的差分方程或状态空间模型。
经验模型辨识方法则利用系统的输入-输出数据建立经验模型,这种方法不需要对系统做具体的建模,适用于复杂系统。
而神经网络辨识方法是通过训练神经网络模型来拟合系统的输入-输出数据,从而得到系统的模型和参数。
二、离散控制系统的参数辨识方法参数辨识是离散控制系统中常用的系统辨识方法之一。
参数辨识方法假设系统的数学模型已知,但其中的参数未知或者不准确,通过实验数据对这些参数进行估计。
在实际应用中,参数辨识方法可以分为两类:基于频域的辨识方法和基于时域的辨识方法。
基于频域的辨识方法主要利用系统的频率响应函数来识别参数,例如最小二乘法、极大似然法等。
而基于时域的辨识方法则是利用系统的时序数据来进行参数估计,例如递推最小二乘法、扩展卡尔曼滤波法等。
三、离散控制系统的经验模型辨识方法经验模型辨识方法是一种不需要假设系统的具体数学模型的系统辨识方法。
该方法通过将系统的输入-输出数据进行数据处理和分析,从中提取系统的特征,建立经验模型。
常见的经验模型辨识方法包括:自回归移动平均模型(ARMA)、自回归滑动平均模型(ARIMA)和动态线性模型(DLM)等。
这些方法都是通过对系统的输入-输出数据进行统计分析和数据建模,从中获得系统的经验模型参数。

人工神经网络系统辨识综述摘要:当今社会,系统辨识技术的发展逐渐成熟,人工神经网络的系统辨识方法的应用也越来越多,遍及各个领域。
首先对神经网络系统辨识方法与经典辨识法进行对比,显示出其优越性,然后再通过对改进后的算法具体加以说明,最后展望了神经网络系统辨识法的发展方向。
关键词:神经网络;系统辨识;系统建模0引言随着社会的进步,越来越多的实际系统变成了具有不确定性的复杂系统,经典的系统辨识方法在这些系统中应用,体现出以下的不足:(1)在某些动态系统中,系统的输入常常无法保证,但是最小二乘法的系统辨识法一般要求输入信号已知,且变化较丰富。
(2)在线性系统中,传统的系统辨识方法比在非线性系统辨识效果要好。
(3)不能同时确定系统的结构与参数和往往得不到全局最优解,是传统辨识方法普遍存在的两个缺点。
随着科技的继续发展,基于神经网络的辨识与传统的辨识方法相比较具有以下几个特点:第一,可以省去系统机构建模这一步,不需要建立实际系统的辨识格式;其次,辨识的收敛速度仅依赖于与神经网络本身及其所采用的学习算法,所以可以对本质非线性系统进行辨识;最后可以通过调节神经网络连接权值达到让网络输出逼近系统输出的目的;作为实际系统的辨识模型,神经网络还可用于在线控制。
1神经网络系统辨识法1.1神经网络人工神经网络迅速发展于20世纪末,并广泛地应用于各个领域,尤其是在模式识别、信号处理、工程、专家系统、优化组合、机器人控制等方面。
随着神经网络理论本身以及相关理论和相关技术的不断发展,神经网络的应用定将更加深入。
神经网络,包括前向网络和递归动态网络,将确定某一非线性映射的问题转化为求解优化问题,有一种改进的系统辨识方法就是通过调整网络的权值矩阵来实现这一优化过程。
1.2辨识原理选择一种适合的神经网络模型来逼近实际系统是神经网络用于系统辨识的实质。
其辨识有模型、数据和误差准则三大要素。
系统辨识实际上是一个最优化问题,由辨识的目的与辨识算法的复杂性等因素决定其优化准则。

1, neural network information processing mathematical processNeural network information processing can be used to illustrate the mathematical process, this process can be divided into two phases; the implementation phase and learning phase. The following note to the network before the two phases.1. Implementation phaseImplementation stage is the neural network to process the input information and generates the corresponding output process. In the implementation phase, the network structure and weights of the connection is already established and will not change. Then there is:X i (t +1) = f i [u i (t +1)]Where: X i is the pre-order neurons in the output;W ij is the first i of neurons and pre-j neurons synapse weightsθ i: i neurons is the first threshold;i-f i is the neuron activation function;I X i is the output neurons.2. Learning phaseNeural network learning phase is from the sound stage; this time, the learning network according to certain rule changes synaptic weights W ij,in order to enable end fixed measure function E is minimized. General access:E = (T i, X i) (1-9)Where, T i is the teacher signal;X i is the neuron output.Learning formula can be expressed as the following mathematical expression:Where: Ψ is a nonlinear function;η ij is the weight rate of change;n is the number of iterations during learning.For the gradient learning algorithm, you can use the following specific formula:Neural networks of information processing in general need to learn and implementation phases and combined to achieve a reasonable process. Neural network learning is to obtain information on the adaptability of information, or information of the characteristics; and neural network implementation process of information is characteristic of information retrieval or classification process.Learning and neural network implementation is indispensable to the two treatment and function. Neural network behavior and the role of various effective are two key processes by which to achieve.Through the study phase, can be a pair neural network training mode is particularly sensitive information, or have some characteristics of dynamic systems. Through the implementation phase, you can use neural networks to identify the information model or feature.In intelligent control, using neural network as controller, then the neural network learning is to learn the characteristics of controlled object, so that neural network can adapt to the input-output relationship between the controlled object; Thus, in implementation, neural network will be able to learn the knowledge of an object to achieve just the right control.Second, back-propagation BP modelNeural network learning is one of the most important and most impressive features. In neural network development process, learning algorithm has a very important position. At present, people put forward neural network model and learning algorithm are appropriate. So, sometimes people do not go to pray on the model and algorithm are strict definition or distinction. Some models can have a variety of algorithms. However, some algorithms may be used for a variety of models. However, sometimes also known as the model algorithm.Since the 40's Hebb learning rule has been proposed, people have proposed a variety of learning algorithms. Among them, in 1986, proposed by Rumelhart and other back-propagation method, that is, BP (error BackPropagation) method most widely affected. Even today, BP control algorithm is still the most important application of the most effective algorithm.1.2.1 Neural network learning mechanisms and institutionsIn the neural network, the model provided on the external environment to learn the training samples, and to store this model is called sensor; ability to adapt to external environment, can automatically extract the external environmental characteristics, is called cognitive device .Neural Networks in the study, generally divided into a study of two teachers and not teachers. Sensor signal by a teacher to learn, and cognitive devicesare used to learn without teacher signals. Such as BP neural network in the main network, Hopfield network, ART network and Kohonen network; BP network and Hopfield network is necessary for teachers to learn the signal can be; and ART network and Kohonen network signals do not need teachers to learn. The so-called teacher signal, that is, learning in neural network model of sample provided by an external signal.First, the learning structure of sensorPerceptron learning is the most typical neural network learning.At present, the control application is a multilayer feedforward network, which is a sensor model, learning algorithm is BP method, it is a supervised learning algorithm.A teacher of the learning system can be expressed in Figure 1-7. This learning system is divided into three parts: input Ministry of Training Department of the Ministry and output.Input received from outside the Department of input samples X, conducted by the Training Department to adjust the network weights W, and then the Department of the output from the output. Zai this process, the desired output signal can be used as teacher signal input, by the teacher signal and the actual output Jinxingbijiao, produce the Wucha right to Kongzhixiugai系数W.Learning organization structure can be expressed as shown in Figure 1-8.In the figure, X l, X 2, ..., X n, is the input sample signals, W 1, W 2, ..., W n are weights. Input sample signal X i can take discrete values "0" or "1." Input sample signa ls weights role in the u produces the output ΣW i X i, that is:u = ΣW i X i = W 1 X 1 + W 2 X 2 + ... + W n X nThen the desired output signal Y (t) and u compare the resulting error signal e. Body weight that is adjusted according to the error e to the power factor of the learning system be modified, modify the direction of the error e should be made smaller, and constantly go on, so that the error e is zero, then the actual output value of u and the desired output value Y ( t) exactly the same, then the end of the learning process.Neural network learning generally require repeated training, error tends gradually to zero, and finally reaches zero. Then the output will be consistent with expectations. neural network learning is the consumption of a certain period, some of the learning process to be repeated many times, even up to 10 000 secondary. The reason is that neural network weights W have a lot of weight W 1, W 2 ,---- W n; that is, more than one parameter to modify the system. Adjusting the system parameters must be time-consuming consumption. At present, the neural network to improve the learning speed and reduce thenumber of repeat learn the importance of research topic is real-time control of the key issues.Second, Perceptron learning algorithmSensor is a single-layer neural network computing unit, from the linear elements and the threshold component composition. Sensor shown in Figure 1-9.Figure 1-9 Sensor structureThe mathematical model of sensor:Where: f [.] Is a step function, and thereθ is the threshold.The greatest effect sensor is able to enter the sample classificationThat is, when the sensor output to 1, the input samples as A; output is -1, the input sample as B class. From the sensor can see the classification boundaries are:Only two components in the input sample X1, X2, then a classification boundary conditions:ThatW 1 X 1 + W 2 X 2-θ = 0 (1-17)Can also be written asThen the classification as shown in solid 1-10.Perceptron learning algorithm aims to find appropriate weights w = (w1.w2, ..., Wn), the system for a particular sample x = (xt, x2, ..., xn) Bear generate expectations d. When x is classified as category A, the expected value of d = 1; X to B class, d =- 1. To facilitate the description perceptron learningalgorithm, the threshold θ and w in the human factor, while the corresponding increase in the sample x is also a component of x n +1.So that:W n +1 =- θ, X n +1 = 1 (1-19)The sensor output can be expressed as:Perceptron learning algorithm as follows:1. Set initial value of the weights wOn the weights w = (W 1. W 2, ..., W n, W n +1) of the various components of the zero set of a small random value, but W n +1 =-G. And recorded as W l (0), W 2 (0), ..., W n (0), while there Wn +1 (0) =- θ. Where W i (t) as the time from i-tEnter the weight coefficient, i = 1,2, ..., n. W n +1 (t) for the time t when the threshold.2. Enter the same as the X = (X 1, X 2, ..., X n +1) and its expected output d. Desired output value d in samples of different classes are not the same time value. If x is A class, then take d = 1, if x is B, then take -1. The desired output signal d that is, the teacher.3. Calculate the actual output value of Y4. According to the actual output error e requeste = d-Y (t) (1-21)5. With error e to modify the weightsi = 1,2, ..., n, n +1 (1-22)Where, η is called the weight change rate, 0 <η ≤ 1In equation (1-22) in, η the value can not be too much. If a value too large will affect the w i (t) stability; the value can not be too small, too small will make W i (t) the process of deriving the convergence rate is too slow.When the actual output and expected the same d are:W i (t +1) = W i (t)6. Go to point 2, has been implementing to all the samples were stable. From the above equation (1-14) known, sensor is actually a classifier, it is this classification and the corresponding binary logic. Therefore, the sensor can be used to implement logic functions. Sensor to achieve the following logic function on the situation of some description.Example: Using sensors to achieve the logic function X 1 VX 2 of the true value:To X1VX2 = 1 for the A class to X1VX2 = 0 for the B category, there are equationsThat is:From (1-24) are:W 1≥θ, W 2≥θSo that W 1 = 1, W 2 = 2Have: θ ≤ 1Take θ = 0.5There are: X1 + X2-0.5 = 0, the classification shown in Figure 1-11.Figure 1-11 Logic Function X 1 VX 2 classification1.2.2 Gradient Neural Network LearningDevice from the flu, such as the learning algorithm known, the purpose of study is on changes in the network weights, so that the network model for the input samples can be correctly classified. When the study ended, that is when the neural network correctly classified, the weight coefficient is clearly reflected in similar samples of the input common mode characteristics. In other words, weight is stored in the input mode. As the power factor is theexisting decentralized, so there is a natural neural network distributed storage features.Sensor in front of the transfer function is a step function, so it can be used as a classifier. The previous section about the Perceptron learning algorithm because of its transfer function is simple and limitations.Perceptron learning algorithm is quite simple, and when the function to ensure convergence are linearly separable. But it is also problematic: that function is not linearly separable, then seek no results; Also, can not be extended to the general feed-forward network.In order to overcome the problems, so people put forward an alternative algorithm - gradient algorithm (that is, LMS method).In order to achieve gradient algorithm, so the neurons can be differential excitation function to function, such as Sigmoid function, Asymmetric Sigmoid function f (X) = 1 / (1 + e-x), Symmetric Sigmoid function f (X) = (1-e-x) / (1 + e-x); instead of type (1-13) of the step function.For a given sample set X i (i = 1,2,, n), gradient method seeks to find weights W *, so f [W *. X i] and the desired output Yi as close as possible.Set error e using the following formula, said:Where, Y i = f 〔W *· X i] is the corresponding sample X i s i real-time output I-Y i is the corresponding sample X i of the desired output.For the smallest error e, can first obtain the gradient of e:Of which:So that U k = W. X k, there are:That is:Finally, the negative gradient direction changes according to the weight coefficient W, amend the rules:Can also be written as:In the last type (1-30), type (1-31) in, μ is the weight change rate, the situation is different depending on different values, usually take between 0-1 decimal. Obviously, the gradient method than the original perceptron learning algorithm into a big step. The key lies in two things:1. Neuron transfer function using a continuous s-type function, rather than the step function;2. Changes on the weight coefficient used to control the error of gradient, rather than to control the error. dynamic characteristics can be better, that enhance its convergence process.But the gradient method for the actual study, the feeling is still too slow; Therefore, this algorithm is still not ideal.1.2.3 BP algorithm back-propagation learningBack-propagation algorithm, also known as BP. Because of this algorithm is essentially a mathematical model of neural network, so, sometimes referred to as BP model.BP algorithm is to solve the multilayer feedforward neural network weights optimization of their argument; Therefore, BP algorithm is also usually impliesthat the topology of neural network is a multilayer no feedback to the network. . Sometimes also called non-feedback neural networks using the BP model.Here, not too hard to distinguish between arguments and the relevant algorithms and models of both similarities and differences. Perceptron learning algorithm is a single-layer network learning algorithm. In the multi-layer network. It can only change the final weights. Therefore, the perceptron learning algorithm can not be used for multi-layer neural network learning. In 1986, Rumelhart proposed back propagation learning algorithm, that is, BP (backpropagation) algorithm. This algorithm can be in each layer, to amend the Weights and therefore suitable for multi-network learning. BP algorithm is the most widely used learning algorithm of neural network is one of the most useful in the control of the learning algorithm.1, BP algorithm theoryBP algorithm is used for feed-forward multi-layer network learning algorithm It contains input and output layer and input and output layers in the middle layer. The middle layer has single or multi-layer, because they have no direct contact with the outside world, it is also known as the hidden layer. In the hidden layer neurons, also known as hidden units. Although the hidden layer and the outside world are not connected. However, their status will affect therelationship between input and output. It is also said to change the hidden layer weights, you can change the multi-layer neural network performance.M with a layer of neural network and the input layer plus a sample of X; set the first layer of i k input neurons is expressed as the sum of U i k, the output X i k; k-1 layer from the first j months neuron to i-k layer neurons coefficient W ij the weight each neuron excitation function f, then the relationship between various variables related to mathematics can be expressed as the following:X i k = f (U i k)Back-propagation algorithm is divided into two parts, namely, forward propagation and back propagation. The work of these two processes are summarized below.1. Forward propagationInput samples from the input layer after layer of a layer of hidden units for processing, after the adoption of all the hidden layer, then transmitted to the output layer; in the process of layer processing, the state of neurons in each layer under a layer of nerve only element of state influence. In the output layer to the current output and expected output compare, if the current output is not equal to expected output, then enter the back-propagation process.2. Back-propagationReverse propagation, the error signal being transmitted by the original return path back, and each hidden layer neuron weights all be modified to look towards the smallest error signal.Second, BP algorithm is a mathematical expressionBP algorithm is essentially the problem to obtain the minimum error function. This algorithm uses linear programming in the steepest descent method, according to the negative gradient of error function changes the direction of weights.To illustrate the BP algorithm, first define the error function e. Get the desired output and the square of the difference between actual output and the error function, there are:Where: Y i is the expected output units; it is here used as teacher signals;X i m is the actual output; because the first m layer is output layer.As the BP algorithm by error function e of the negative gradient direction changes the weight coefficient, it changes the weight coefficient W ij the amount Aw ij, and eWhere: η is learning rate, that step.Clearly, according to the principles of BP algorithm, seeking ae / aW ij the most critical. The following requirements ae / aW ij; haveAsWhere: η is learning rate, that step, and generally the number between 0-1. Can see from above, d i k the actual algorithm is still significant given the end of the formula, the following requirements d i k formula.To facilitate derivation, taking f is continuous. And generally the non-linear continuous function, such as Sigmoid function. When taking a non-symmetrical Sigmoid function f, are:Have: f '(U i k) = f' (U i k) (1-f (U i k))= X i k (1-X i k) (1-45)Consider equation (1-43) in the partial differential ae / aX i k, there are two cases to be considered:If k = m, is the output layer, then there is Y i is the expected output, it is constant. From (1-34) haveThus d i m = X i m (1-X i m) (X i m-Y i)2. If k <m, then the layer is hidden layer. Then it should be considered on the floor effect, it has:From (1-41), the known include:From (1-33), the known are:Can see from the above process: multi-layer network training method is to add a sample of the input layer, and spread under the former rules:X i k = f (U i k)Keep one level to the output layer transfer, the final output in the output layer can be X i m.The Xim and compare the expected output Yi. If the two ranges, the resulting error signal eNumber of samples by repeated training, while gradually reducing the error on the right direction factor is corrected to achieve the eventual elimination of error. From the above formula can also be aware that if the network layer is higher, the use of a considerable amount of computation, slow convergence speed.To speed up the convergence rate, generally considered the last of the weight coefficient, and to amend it as the basis of this one, a modified formula:W here: η is the learning rate that step, η = 0.1-0.4 or soɑ constant for the correction weights, taking around 0.7-0.9.In the above formula (1-53) also known as the generalized Delta rule. For there is no hidden layer neural network, it is desirableWhere:, Y i is the desired output;X j is the actual output of output layer;X i for the input layer of input.This is obviously a very simple case, equation (1-55), also known as a simple Delta rule.In practice, only the generalized Delta rule type (1-53) or type (1-54) makes sense. Simple Delta rule type (1-55) only useful on the theoretical derivation. 3, BP algorithm stepsIn the back-propagation algorithm is applied to feed-forward multi-layer network, with the number of Sigmoid as excited face when the network can use the following steps recursively weights W ij strike. Note that for each floor there are n neurons, when, that is, i = 1,2, ..., n; j = 1,2, ..., n. For the first i-k layer neurons, there are n-weights W i1, W i2, ..., W in, another to take over - a W in +1for that threshold θ i; and the input sample X When taking x = (X 1, X 2, ..., X n, 1).Algorithm implementation steps are as follows:1. On the initial set weights W ij.On the weights W ij layers a smaller non-zero set of random numbers, but W i, n +1 =- θ.2. Enter a sample X = (x l, x 2, ..., x n, 1), and the corresponding desired output Y = (Y 1, Y 2, ..., Y n).3. Calculate the output levelsI-level for the first k output neurons X i k, are:X i k = f (U i k)4. Demand levels of learning error d i kFor the output layer has k = m, thered i m = X i m (1-X i m) (X i m-Y i)For the other layers, there5. Correction weights Wij and threshold θ Using equation (1-53) when:Using equation (1-54) when:Of which:6. When the weights obtained after the various levels, can determine whether a given quality indicators to meet the requirements. If you meet the requirements, then the algorithm end; If you do not meet the requirements, then return to (3) implementation.This learning process, for any given sample X p = (X p1, X p2, ... X pn, 1) and the desired output Y p = (Y p1, Y p2, ..., Y pn) have implemented until All input and output to meet the requirement.。
基于神经网络的非线性系统辨识随着人工智能技术的不断发展,神经网络技术成为人工智能领域中一个重要的研究方向。
神经网络具有自主学习、自适应和非线性等特点,因此在实际应用中有很大潜力。
本文将介绍神经网络在非线性系统辨识中的应用。
一、什么是非线性系统辨识?非线性系统辨识是指对一些非线性系统进行建模与识别,通过参数估计找到最佳的系统模型以进行预测分析和控制。
在许多实际应用中,非线性系统是比较常见的,因此非线性系统辨识技术的研究和应用具有重要的意义。
二、神经网络在非线性系统辨识中的应用神经网络在非线性系统辨识中具有很好的应用效果。
其主要原因是神经网络具有强大的非线性建模和逼近能力。
常用的神经网络模型包括前馈神经网络、递归神经网络和卷积神经网络等。
下面主要介绍前馈神经网络在非线性系统辨识中的应用。
1. 神经网络模型建立前馈神经网络由输入层、隐含层和输出层组成。
在非线性系统辨识中,输入层由外部输入量组成,隐含层用于提取输入量之间的非线性关系,输出层则用于输出系统的状态变量或输出变量。
模型建立的关键是隐含层神经元的个数和激活函数的选取。
2. 系统建模在非线性系统的建模过程中,需要将输出变量与输入变量之间的非线性关系进行建立。
可以使用最小二乘法、最小均方误差法等方法,对神经网络进行训练和学习,在一定的误差范围内拟合系统模型。
此外,也可以使用遗传算法、粒子群算法等优化算法来寻找最优的神经网络参数。
3. 系统预测和控制在系统建模和参数估计后,神经网络可以用于非线性系统的预测和控制。
在预测过程中,将系统的状态量输入前馈神经网络中,通过输出层的计算得到系统的输出量。
在控制过程中,将前馈神经网络与控制器相结合,在控制对象输出量和期望值不同时,自动调节控制器参数的值来实现系统的控制。
三、神经网络在非线性系统辨识中的优势和挑战与传统的线性系统模型相比,神经网络模型可以更好地描述非线性系统,并且可以用于对于非线性系统的建模和控制。
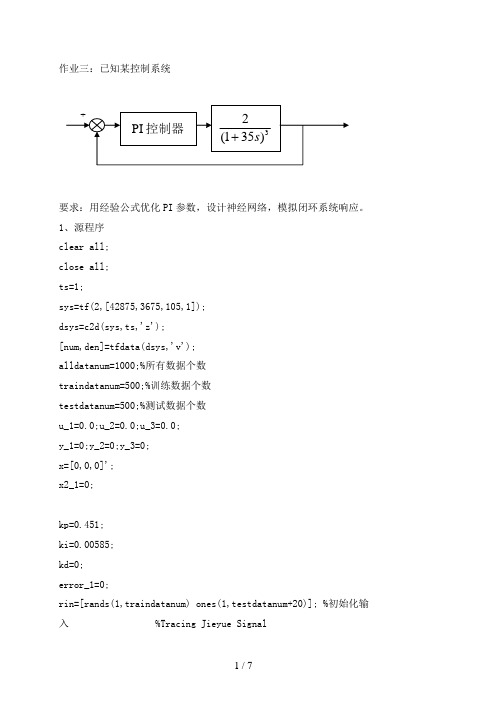
作业三:已知某控制系统要求:用经验公式优化PI参数,设计神经网络,模拟闭环系统响应。
1、源程序clear all;close all;ts=1;sys=tf(2,[42875,3675,105,1]);dsys=c2d(sys,ts,'z');[num,den]=tfdata(dsys,'v');alldatanum=1000;%所有数据个数traindatanum=500;%训练数据个数testdatanum=500;%测试数据个数u_1=0.0;u_2=0.0;u_3=0.0;y_1=0;y_2=0;y_3=0;x=[0,0,0]';x2_1=0;kp=0.451;ki=0.00585;kd=0;error_1=0;rin=[rands(1,traindatanum) ones(1,testdatanum+20)]; %初始化输入 %Tracing Jieyue Signalfor k=1:1:1020time(k)=k*ts;u(k)=kp*x(1)+kd*x(2)+ki*x(3); %PID Controllerif u(k)>=10u(k)=10;endif u(k)<=-10u(k)=-10;end%Linear modelyout(k)=-den(2)*y_1-den(3)*y_2-den(4)*y_3+num(1)*u(k)+num(2)*u_1+num(3)*u_2+num(4)*u_3; error(k)=rin(k)-yout(k);%----------Return of PID parameters------------%u_3=u_2;u_2=u_1;u_1=u(k);y_3=y_2;y_2=y_1;y_1=yout(k);x(1)=error(k); % Calculating Px2_1=x(2);x(2)=(error(k)-error_1)/ts; % Calculating Dx(3)=x(3)+error(k)*ts; % Calculating Ierror_1=error(k);end%构建训练数据队alldatain=[];alldataout=[];for i=10:alldatanum+11newin=[rin(i-9);yout(i-1)];alldatain=[alldatain newin];%输入层为u(k),y(k+1) alldataout=[alldataout yout(i)];%期望输出y(k) end%从所有数据中取前500作为训练,后500作为测试traindatain=alldatain(:,1:traindatanum);traindataout=alldataout(:,1:traindatanum);testdatain=alldatain(:,traindatanum+1:alldatanum); testdataout=alldataout(:,traindatanum+1:alldatanum);figurehold ongridj=1:500;plot(j,testdatain,'k-')xlabel('input t');ylabel('output u');title('测量函数曲线与实际函数曲线');indim=2;%输入层神经元维数为2outdim=1;%输出层神经元维数为1hiddenunitnum=10;%隐含层神经元个数为10maxepochs=10000;%设定训练的最大次数lr=0.001;%设定学习速率/步长alpha=0.8;%动量项系数E0=0.001;%设定期望误差最小值%初始化输出层加权系数,隐层加权系数(wki,wij)w1=0.767*rands(hiddenunitnum,indim); %w1隐层加权系数b1=0.767*rands(hiddenunitnum,1); %隐含层阈值w2=0.767*rands(outdim,hiddenunitnum); %w2输出层加权系数b2=1*rands(outdim,1); %输出层阈值%构成权值和阈值的矩阵w1ex=[w1 b1];w2ex=[w2 b2];dw1ex=zeros(size(w1ex));dw2ex=zeros(size(w2ex));traindatainex=[traindatain' ones(traindatanum,1)]'; errorhistory=[];for k=1:maxepochshiddenout=logsig(w1ex*traindatainex);hiddenoutex=[hiddenout' ones(traindatanum,1)]';networkout=w2ex*hiddenoutex;error=traindataout-networkout;SSE=sqrt(sumsqr(error));errorhistory=[errorhistory SSE];if SSE<E0break;end%调整输出层和加权系数w2和隐含层加权系数w1delta2=error;delta1=w2'*delta2.*hiddenout.*(1-hiddenout);dw1ex0=lr*dw1ex;dw2ex0=lr*dw2ex;dw2ex=delta2*hiddenoutex';dw1ex=delta1*traindatainex';w1ex=w1ex+lr*dw1ex+alpha*dw1ex0;w2ex=w2ex+lr*dw2ex+alpha*dw2ex0;w2=w2ex(:,1:hiddenunitnum);endk;w1=w1ex(:,1:indim);b1=w1ex(:,indim+1);w2=w2ex(:,1:hiddenunitnum);b2=w2ex(:,1+hiddenunitnum);testhiddenout=logsig(w1*testdatain+repmat(b1,1,testdatanum)); testnnout=w2*testhiddenout+repmat(b2,1,testdatanum);plot(j,testnnout,'r-')figurehold ongrid[xx,num]=size(errorhistory);plot(1:num,errorhistory,'r-');title('实际与测量函数曲线的误差变化曲线');xlabel('迭代次数N');ylabel('误差E');2、利用BP神经网络模拟闭环系统系统,仿真结果结果:从两图可以看出,BP神经网络较好的模拟了系统的闭环响应。