台达伺服电机驱动器的常见问题
- 格式:doc
- 大小:222.00 KB
- 文档页数:5
伺服常见报警及处理方法
一.伺服使用前的准备
1.产品检查
a.分别检查电机和驱动器的产品型号,确保型号正确;
b.电机转轴是否平稳,对于带刹车的电机,在刹车线圈上加上24V之后再检查;
c.驱动器和电机外观是否有损坏,对于安装在机械上的电机,要检查螺丝是否有松动的地方。
2.接线检查
确保电源线,电机动力线和编码器接线正确;
对于电源线,要注意电压等级和形式,电源电压符合伺服要求,且电压稳定;
初次使用,务必提醒客户先看明白接线图再接线。
二.初次上电
驱动器恢复出厂值:P2—08=10;
断电后重新上电;
消除原始报警信息:P2—15=0,P2—16=0,P2—17=0;
断电后重现上电,设定用户参数,或点动试机。
三.常见报警信息及处理
位置误差过大,通俗的讲就是伺服接收到的脉冲多反馈的脉冲少,遇到这个故障要排除几个点:
1.伺服的动力线是否有问题(有客户出现过,伺服动力线焊点脱落,也就是说,发再多的脉冲,电机也不动作),如果伺服上电就报ALE09,如果排除动力线相序没有问题,这样可以粗略判断是动力线的故障;
2.机械结构卡死,出现这种情况,一般是伺服在运行的过程中突然出现ALE09并伴随者ALE06报警,这时候,可以去检查机械结构。
伺服常见的报警,大多是因为接线或参数的调整引起的,所以当出现报警时,首先要检查的就是接线,确保接线正确,其次就是能恢复出厂值的,就恢复一下出厂值,然后再试。
常见的伺服驱动器故障及处理方法伺服驱动器是一种控制电机运动的装置,用于将控制信号转换为电机运动。
然而,由于各种原因,伺服驱动器可能会发生故障,导致电机无法正常运转。
以下是一些常见的伺服驱动器故障及处理方法:1.电源故障:伺服驱动器的电源供应不稳定或无法正常工作,可能导致电机运动异常或停止。
处理方法包括检查电源连接是否稳定,更换或修复电源供应设备。
2.控制信号故障:伺服驱动器的控制信号传输发生故障,使电机无法按预期进行运动。
处理方法包括检查信号线是否连接正确,信号是否在传输过程中受到干扰,更换或修复信号传输设备。
3.电机故障:伺服驱动器无法正确控制电机运动的一个常见原因是电机本身出现故障。
处理方法包括检查电机是否受损或烧毁,更换故障电机。
4.参数设置错误:伺服驱动器的参数设置与实际应用要求不匹配,导致电机无法正常工作。
处理方法包括检查伺服驱动器的参数设置是否正确,根据实际需求重新配置参数。
5.过载保护:伺服驱动器可能会出于过载保护的目的停止电机运动。
处理方法包括检查负载是否过重或电机是否存在其他故障,减少负载或修复电机问题。
6.温度过高:伺服驱动器长时间工作可能导致温度过高而停止运行。
处理方法包括检查散热设备是否正常工作,增加散热效果或降低工作负载。
7.通讯故障:伺服驱动器与其他设备之间的通讯故障可能导致电机无法正常运行。
处理方法包括检查通讯线路是否连接正确,通讯协议是否一致,修复或替换通讯设备。
8.机械部件故障:伺服驱动器的机械结构或传动部件出现故障可能导致电机无法运动。
处理方法包括检查机械部件是否受损或磨损,修复或更换故障部件。
9.乱码或干扰:伺服驱动器可能会受到外部干扰或电磁干扰导致运动异常。
处理方法包括检查干扰源并采取隔离措施,加装屏蔽设备或更换信号处理设备。
10.软件故障:伺服驱动器的控制软件可能出现错误或崩溃,导致电机无法正常运行。
处理方法包括重启伺服驱动器,重新安装或更新软件。
伺服驱动器常有故障的原由及对策伺服驱动器因为长时间的使用,不免会出现故障,最重要的是实时查找出原由,对应解决故障,提早恢复正常使用。
小编在这整理伺服驱动器常有的故障原由及对策供大家参考。
1、伺服电机在有脉冲输出时不运行,怎样办理?①监督控制器的脉冲输出目前值以及脉冲输出灯能否闪耀,确认指令脉冲已经执行并已经正常输出脉冲 ;②检查控制器到驱动器的控制电缆,动力电缆,编码器电缆能否配线错误,损坏或许接触不良 ;③检查带制动器的伺服电机其制动器能否已经翻开;④监督伺服驱动器的面板确认脉冲指令能否输入;⑤ Run 运行指令正常 ;⑥控制模式务必选择地点控制模式;⑦伺服驱动器设置的输入脉冲种类和指令脉冲的设置能否一致;⑧保证正转侧驱动严禁,反转侧驱动严禁信号以及偏差计数器复位信号没有被输入,脱开负载而且空载运行正常,检查机械系统。
2、伺服电机高速旋转时出现电机偏差计数器溢犯错误,怎样办理?①高速旋转时发生电机偏差计数器溢犯错误;对策:检查电灵活力电缆和编码器电缆的配线能否正确,电缆能否有损坏。
②输入较长指令脉冲时发生电机偏差计数器溢犯错误;对策:a. 增益设置太大,从头手动调整增益或使用自动调整增益功能;b. 延伸加减速时间 ;c. 负载过重,需要从头选定更大容量的电机或减少负载,加装减速机等传动机构提高负荷能力。
③运行过程中发生电机偏差计数器溢犯错误。
对策:a. 增大偏差计数器溢出水平设定值;b. 减慢旋转速度 ;c. 延伸加减速时间 ;d. 负载过重,需要从头选定更大容量的电机或减少负载,加装减速机等传动机构提升负载能力。
3、伺服电机做地点控拟订位严禁,怎样办理?① 第一确认控制器实质发出的脉冲目前值能否和预料的一致,如不一致则检查并修正程序 ;② 监督伺服驱动器接收到的脉冲指令个数能否和控制器发出的一致,如不一致则检查控制线电缆 ;③检查伺服指令脉冲模式的设置能否和控制器设置得一致,如CW/CCW仍是脉冲+方向;④伺服增益设置太大,试试从头用手动或自动方式调整伺服增益;⑤ 伺服电机在进行来去运动时易产生积累偏差,建议在工艺同意的条件下设置一个机械原点信号,在偏差高出同意范围以行进行原点搜寻操作;⑥机械系统自己精度不高或传动机构有异样( 如伺服电机和设施系统间的联轴器部发生偏移等 ) 。

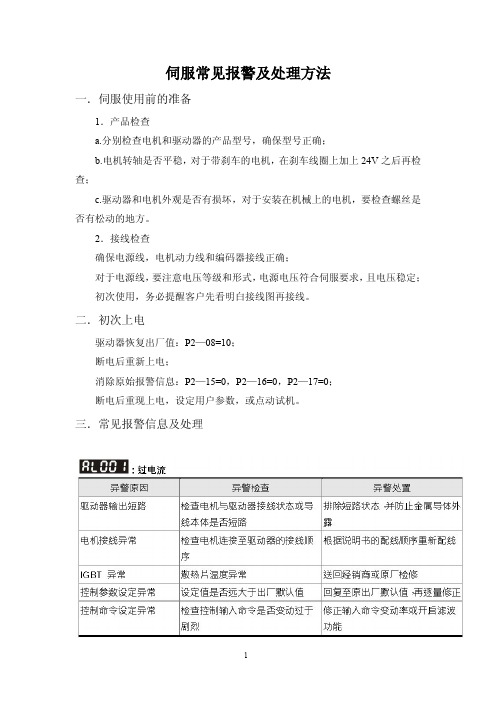
台达伺服驱动器常见异常报警及其排除方法一、电流报警伺服驱动器中常见的电流报警包括过流报警和欠流报警。
1.过流报警:当伺服驱动器输出电流超过设定的最大电流时,会触发过流报警。
可能的原因包括电机过载、电源欠压或电源过压等。
排除方法如下:-检查电机负载,确保负载正常。
-检查电源电压,如果电源电压异常,则应修复电源故障。
-检查伺服驱动器参数设置,确保电流限制设置正确。
2.欠流报警:当伺服驱动器输出电流低于设定的最小电流时,会触发欠流报警。
可能的原因包括电机接线不良、电源欠压或电源过压等。
排除方法如下:-检查电机接线,确保接线良好。
-检查电源电压,如果电源电压异常,则应修复电源故障。
-检查伺服驱动器参数设置,确保电流限制设置正确。
二、速度报警伺服驱动器中常见的速度报警包括超速报警和低速报警。
1.超速报警:当伺服驱动器输出速度超过设定的最大速度时,会触发超速报警。
可能的原因包括速度指令过大、电源电压波动较大等。
排除方法如下:-检查速度指令,确保速度指令在设定范围内。
-检查电源电压,如果电源电压波动较大,则应修复电源故障。
-检查伺服驱动器参数设置,确保速度限制设置正确。
2.低速报警:当伺服驱动器输出速度低于设定的最小速度时,会触发低速报警。
可能的原因包括速度指令过小、电源电压波动较大等。
排除方法如下:-检查速度指令,确保速度指令在设定范围内。
-检查电源电压,如果电源电压波动较大,则应修复电源故障。
-检查伺服驱动器参数设置,确保速度限制设置正确。
三、位置报警伺服驱动器中常见的位置报警包括过程中位置偏差过大报警和位置超出边界报警。
1.位置偏差过大报警:当伺服驱动器输出位置偏差超过设定的最大值时,会触发位置偏差过大报警。
可能的原因包括负载过大、轴承损坏或机械传动部件故障等。
排除方法如下:-检查负载,确保负载正常。
-检查轴承和机械传动部件,如果有损坏,则应修复或更换。
-检查伺服驱动器参数设置,确保位置偏差设置正确。
2.位置超出边界报警:当伺服驱动器输出位置超出设定的边界范围时,会触发位置超出边界报警。
所谓的PUU (Pulse of User Unit)用户单位,为一个经过电子齿轮比的用户单位,这样的设计,可以让使用者不必自行转换外部实际物理Encoder回授量与电子齿轮间的关系。
例如:ASDA-A2的encoder,每转一圏,物理量将回授1280000个脉波,如果想要改变马逹走一圏时的回授脉波数,例如100000个脉波当作一圏,则可以设P1-44(N) =128;P1-45(M) =10,当马逹转完一圏时,ASDA-A2会收到100000个脉波,这个经过电子齿轮比运算的100000,其单位即为PUU,如果要在控制器内部下逹马逹走两圏的命令时,只需根据所定义的PUU下200000个PUU命令,控制器内部会自动换回其实际的物理量,这个用法很直觉,下图为其运算原理。
一般一直认为同样的负载、同样的惯量(切刀伺服),使用同等1. 并不是高惯量就一定好,低惯量就一定差,要看其应用场合。
T= I x α (扭力= 惯量x 角加速度)P= T x ω (功率= 扭力x 角速度)P = I x α x ω所以,同样的功率之下,若惯量提升,加速度必下降,即加减速的特性变差了,当然,角速度也会相对变化,在此我们先假设其运转速度不变。
I是固定的,当一个系统设定好后(如飞刀系统,因为飞刀不变,但如果用于输送带,惯量则会变,当输送带上的物品变多时,拖的力量需加大)。
所以,你可以利用T= I x α 来估其加减速的大小及所需的扭力α = (目标转速- 初始速度) / (初始速度到目标速度所需时间)若一个系统需1 N-m的扭力,则高惯量与低惯量的马逹皆可逹成时,如果要其反应快一点,转快一点,则低惯量会是比较理想的选择。
用以上的公式,也可以轻而易举的解释,因为低惯量马逹,其转子惯量比较低,转子比较轻,所以要停下来,回生的能量比较少,以同样的速度撞墙,胖子撞的力量会比瘦的大。
总而言之,如果要反应快,加减速特性好,如果扭力值够的话,选用低惯量的马逹会比较理想,如果要求是要大扭力的,如举重物,则可能要选用高惯量的马达。

常见的伺服驱动器故障及处理方法伺服驱动器是一种用于控制伺服电机的装置,通常用于工业自动化领域。
由于长时间运行和受各种条件的影响,伺服驱动器可能会出现各种故障。
以下是一些常见的伺服驱动器故障及其处理方法。
1.电压不稳定:当电压波动较大时,可能导致伺服驱动器无法正常工作。
解决方法是使用稳压器来稳定电压,或者使用电压稳定器来提供稳定的电压。
2.过载保护:当负载超过伺服驱动器的额定功率时,可能会触发过载保护,导致伺服驱动器停止工作。
解决方法是检查负载是否超过额定功率,并相应调整负载或更换更高功率的伺服驱动器。
3.温度过高:长时间运行或工作环境温度过高可能导致伺服驱动器过热,从而影响其性能和寿命。
解决方法是确保伺服驱动器安装在通风良好的位置,并定期清理散热器或风扇,以确保良好的散热。
4.通信故障:伺服驱动器通常通过串口或以太网进行通信。
当通信线路中断或存在故障,伺服驱动器可能无法接收或发送指令。
解决方法是检查通信线路是否连接良好,并确保使用可靠的通信设备。
5.编码器故障:编码器是伺服驱动器用于检测电机位置和速度的关键部件。
编码器故障可能导致伺服电机无法准确运动。
解决方法是检查编码器连接是否正确,并进行必要的校准或更换编码器。
6.电源故障:伺服驱动器的电源故障可能导致其无法正常工作。
解决方法是检查电源连接是否稳定,并检查电源是否符合伺服驱动器的要求。
7.控制信号故障:伺服驱动器的控制信号故障可能导致无法实现所需的运动。
解决方法是检查控制信号线路是否连接正确,并确保使用可靠的控制设备。
8.软件故障:伺服驱动器的软件故障可能导致其无法正常运行或反应迟缓。
解决方法是重新启动伺服驱动器,并更新或重新安装软件。
9.机械故障:伺服驱动器与机械设备紧密结合,机械故障可能导致伺服驱动器无法正常工作。
解决方法是检查机械部件是否损坏,并进行必要的修复或更换。
总之,及时识别和解决伺服驱动器故障是确保其正常工作和延长寿命的关键。
通过定期维护、良好的使用环境和合理操作,可以减少伺服驱动器故障的发生,并确保其在工业自动化生产中的稳定运行。
台达伺服驱动器常见异常报警及其排除方法
The final edition was revised on December 14th, 2020.
台达伺服驱动器常见异常报警及其排除方法分析数据:
台达伺服驱动中设置许多报警信号,在一些意外状况下,及时保护驱动器和电机免受损坏,现列出常见故障信号及解决方法。
ALM11编码器接线错误或编码器故障,请仔细检查编码器连接线,检查电机屏蔽线是否连接驱动器。
ALM06过载、电机动力线接线错,检查电机轴安装是否有偏。
ALM09动力线接线不良或电机编码器故障,检查动力线。
ALM03主回路输入电压过低,检查输入电源是否符合要求。
ALM22主回路电源缺相,检查电源线连接是否松动。
2、运行通则
严格遵循操作规程;防止数控装置过热;经常监视数控系统的电网电压;防止尘埃进入数控装置内;存储器用电池定期检查和更换。
数控系统编程、操作和维修人员必须经过专门的技术培训,熟悉所用数控机床的机械、数控系统、强电设备、液压、气源等部分及使用环境、加工条件等;能按机床和系统使用说明书的要求正确、合理地使用。
应尽量避免因操作不当引起的故障。
台达伺服驱动器摘要:本文档旨在介绍台达伺服驱动器的基本原理、特点和应用领域,并提供有关安装、调试和维护的一些常见问题的解决方案。
台达伺服驱动器是一种高性能驱动器,广泛应用于自动化控制系统中的运动控制和精密定位应用。
1. 引言台达伺服驱动器是一种先进的电机驱动控制设备,可以实现高精度的运动控制和快速响应。
它采用了先进的控制算法和数字信号处理技术,可与伺服电机配合使用,提供高速、高精度和可靠的运动控制性能。
2. 工作原理台达伺服驱动器通过反馈控制实现对电机的精确控制。
它接收控制信号,并通过闭环反馈系统将电机的实际位置与期望位置进行比较,然后计算并调整电机的输出来使两者保持一致。
这种闭环控制系统使得台达伺服驱动器具有较高的控制精度和鲁棒性。
3. 特点与优势台达伺服驱动器具有许多特点和优势,使其成为运动控制领域的理想选择。
首先,它具有高分辨率的位置反馈能力,可以实现高精度的位置和速度控制。
其次,它采用了先进的数字信号处理技术和控制算法,具有快速响应的特点,能够有效地减小误差和振荡。
此外,台达伺服驱动器还具有较高的功率密度和高效的能耗管理,能够在小尺寸和低功耗的同时提供强大的控制能力。
4. 应用领域台达伺服驱动器广泛应用于自动化控制系统中的运动控制和精密定位应用。
它们在工业自动化、机器人控制、数控加工、包装系统、半导体制造和医疗设备等领域都有重要的应用。
台达伺服驱动器可以满足不同应用的需求,提供精确的定位和高速的运动控制,提高生产效率和产品质量。
5. 安装与调试在安装和调试台达伺服驱动器时,需要注意一些关键步骤。
首先,确保电源和信号线路的正确连接,以防止电机和驱动器损坏。
其次,进行参数设置和校准,以确保驱动器与电机的匹配和正确工作。
最后,进行系统的调试和性能测试,以验证驱动器的运动控制性能和精度。
6. 维护与故障排除台达伺服驱动器在使用过程中可能会遇到一些故障和问题。
一些常见的故障包括电源故障、电机过载、过热和通信错误。

常见的伺服驱动器故障及处理方法伺服驱动器是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。
一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
以下为伺服驱动器维修的几种方法。
1、LED灯是绿的,但是电机不动(1) 故障原因:一个或多个方向的电机禁止动作。
处理方法:检查+INHIBIT 和–INHIBIT 端口。
(2) 故障原因:命令信号不是对驱动器信号地的。
处理方法:将命令信号地和驱动器信号地相连。
2、上电后,驱动器的LED灯不亮故障原因:供电电压太低,小于最小电压值要求。
处理方法:检查并提高供电电压。
3、当电机转动时, LED灯闪烁(1) 故障原因:HALL相位错误。
处理方法:检查电机相位设定开关是否正确。
(2) 故障原因:HALL传感器故障。
处理方法:当电机转动时检测Hall A, Hall B, Hall C的电压。
电压值应该在5VDC和0之间。
4、LED灯始终保持红色故障原因:存在故障。
处理方法:原因: 过压、欠压、短路、过热、驱动器禁止、HALL无效。
5、电机失速(1) 故障原因:速度反馈的极性搞错。
处理方法:a、如果可能,将位置反馈极性开关打到另一位置。
(某些驱动器上可以)b、如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c、如使用编码器,将驱动器上的ENC A和ENC B对调接入。
d、如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
(2) 故障原因:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。
确保该电源能提供足够的电流。
如使用外部电源,确保该电压是对驱动器信号地的。
6、电机在一个方向上比另一个方向跑得快(1) 故障原因:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。

电机招聘专家所谓的PUU (Pulse of User Unit)使用者单位,為一个经过电子齿轮比的使用者单位,这样的设计,可以让使用者不必自行转换外部实际物理Encoder回授量与电子齿轮间的关係。
例如:ASDA-A2的encoder,每转一圏,物理量将回授1280000个脉波,如果想要改变马逹走一圏时的回授脉波数,例如100000个脉波当作一圏,则可以设P1-44(N) =128;P1-45(M) =10,当马逹转完一圏时,ASDA-A2会收到100000个脉波,这个经过电子齿轮比运算的100000,其单位即為PUU,如果要在控制器内部下逹马逹走两圏的命令时,只需根据所定义的PUU下200000个PUU命令,控制器内部会自动换回其实际的物理量,这个用法狠直觉,下图為其运算原理。
一般一直认為同样的负载、同样的惯量(切刀伺服),使用同等转速的2kW马达,惯量比大的马达应该只有好处没有坏处,但事实上在实验过程中发现:切刀驱动不换,原来使用130框号, 2kW的马达,负载率约120 ~ 140%,负载惯量比1%的马达总是过热,因此当尝试将马达更换為180框号, 2kW,结果换上去后发现速度只要开到800r/min,就会发生ALE02(过电压)或ALE05(回生异常)警示。
两台马达的扭力是一样的,但是原来使用130框号, 2kW的马达,当转速达到1200r/min才会达到极限。
从这个例子来看,并不是马达惯量越大越好,那麼请问在那些应用场合下惯量比发挥的作用影响大,那些应用场合下扭力的影响大?1. 并不是高惯量就一定好,低惯量就一定差,要看其应用场合。
T= I x α(扭力= 惯量x 角加速度) P= T x ω(功率= 扭力x 角速度) P = I x αx ω所以,同样的功率之下,若惯量提升,加速度必下降,即加减速的特性变差了,当然,角速度也会相对变化,在此我们先假设其运转速度不变。
I是固定的,当一个系统设定好后(如飞刀系统,因為飞刀不变,但如果用於输送带,惯量则会变,当输送带上的物品变多时,拖的力量需加大)。
伺服电机常见故障分析及处理伺服电机是一种能够实现精确控制的电机,其常见故障分析及处理如下:1.电机无法启动或无转动-检查电机的供电电压是否正常,如果不正常,检查电源系统并修复。
-检查电机的连接线路是否松动或损坏,如有问题,重新连接或更换电缆。
-检查电机的驱动器或控制器是否正常,如有故障,修复或更换。
-检查电机本身是否损坏,如有需要,修理或更换电机。
2.电机转速不稳定或不一致-检查控制器或驱动器的参数设置是否正确,如有问题,调整参数进行稳定控制。
-检查电机的传感器或编码器是否损坏或松动,如有问题,修复或重新固定。
-检查电机的机械连接部分是否松动或损坏,如有问题,进行调整或更换。
-检查电机的绕组或定子是否损坏,如有需要,修理或更换电机。
3.电机运行过热或发热-检查电机供电电压是否过高,如有问题,调整电压。
-检查电机负载是否过大,如有需要,减少负载。
-检查电机的冷却系统是否正常,如有问题,修复或更换冷却设备。
-检查电机的绝缘是否损坏,如有需要,修理或更换电机。
4.电机震动或噪音过大-检查电机的机械部分是否松动或损坏,如有问题,进行调整或更换。
-检查电机的轴承是否损坏或干涉,如有需要,修理或更换轴承。
-检查电机的定子或转子是否不平衡,如有问题,进行平衡处理。
-检查电机的绕组是否损坏,如有需要,修理或更换电机。
5.电机的定位精度不高-检查控制器或驱动器的参数设置是否正确,如有问题,调整参数进行精确控制。
-检查电机的传感器或编码器是否损坏或松动,如有需要,修复或重新固定。
-检查电机的机械连接部分是否松动或损坏,如有问题,进行调整或更换。
-检查控制系统的反馈回路是否正常,如有问题,修复或更换。
伺服驱动器的常见故障及解决伺服驱动器常用于掌握伺服电机,在需要高精度的定位系统中,伺服驱动器是伺服系统中很重要的一部分。
在自动化应用中,伺服驱动器一些常见故障以及处理方式。
1LED灯是绿的,但是电机不动故障缘由一:一个或多个方向的电机禁止动作。
处理方法:检查+INHIBIT和-INHIBIT端口。
故障缘由二:命令信号不是对驱动器信号地的。
处理方法:将命令信号地和驱动器信号地相连。
2上电后,驱动器的LED灯不亮故障缘由:供电电压太低,小于*小电压值要求。
处理方法:检查并提高供电电压。
3当电机转动时,LED灯闪耀故障缘由一:HALL相位错误。
处理方法:检查电机相位设定开关是否正确。
故障缘由二:HALL传感器故障。
处理方法:当电机转动时检测HallA,HallB,HallC的电压。
电压值应当在5VDC和0之间。
4LED灯始终保持红色故障缘由:存在故障。
处理方法:缘由:过压、欠压、短路、过热、驱动器禁止、HALL无效。
5电机失速故障缘由一:速度反馈的极性搞错。
处理方法:可以尝试以下方法:a.假如可能,将位置反馈极性开关打到另一位置。
(某些驱动器上可以)b.如使用测速机,将驱动器上的TACH+和TACH-对调接入。
c.如使用编码器,将驱动器上的ENCA和ENCB对调接入。
d.如在HALL速度模式下,将驱动器上的HALL-1和HALL-3对调,再将Motor-A和Motor-B对调接好。
故障缘由二:编码器速度反馈时,编码器电源失电。
处理方法:检查连接5V编码器电源。
确保该电源能供应足够的电流。
如使用外部电源,确保该电压是对驱动器信号地的。
6电机在一个方向上比另一个方向跑得快故障缘由一:无刷电机的相位搞错。
处理方法:检测或查出正确的相位。
故障缘由二:在不用于测试时,测试/偏差开关打在测试位置。
处理方法:将测试/偏差开关打在偏差位置。
故障缘由三:偏差电位器位置不正确。
处理方法:重新设定。
7示波器检查驱动器的电流监控输出端时,发觉它全为噪声,无法读出故障缘由:电流监控输出端没有与沟通电源相隔离(变压器)。

伺服电机常见故障分析伺服电机是一种配有编码器的电机,可以对输出的力和位置进行精确控制。
虽然伺服电机具有较高的可靠性和稳定性,但在长时间使用过程中仍然可能出现一些常见故障。
下面将对伺服电机的常见故障进行详细分析。
1.电机不转或启动困难:可能是电源故障导致的,检查电源是否正常供电。
还可能是电机接线不良,进行检查和修复。
此外,还需要检查驱动器是否工作正常,是否有故障信号。
2.电机转速不稳定:这可能是由于驱动器的参数设置不合适或编码器信号异常导致的。
可以通过重新调整驱动器的参数来解决此问题。
如果编码器信号异常,需要进行检查和修复。
3.电机发热过高:这可能是由于电机负载过重、运行时间过长或环境温度过高导致的。
解决方法可能是减少负载,及时停机冷却,或者改善环境温度条件。
4.电机振动过大:这可能是由于机械传动系统不平衡、电机安装不稳定或驱动器参数不合适等原因导致的。
可以通过平衡机械系统、重新安装电机或调整驱动器参数来解决此问题。
5.电机报警或故障停机:这可能是由于驱动器的故障保护功能触发导致的。
检查驱动器的故障代码,根据代码进行相应的处理。
6.电机位置误差过大:这可能是由于编码器信号异常、驱动器参数设置不合适或机械传动系统松动等原因导致的。
可以通过检查编码器信号、重新调整驱动器参数或紧固机械传动系统来解决位置误差过大的问题。
7.电机噪音过大:这可能是由于电机负载过重、机械传动系统不平衡或驱动器工作异常导致的。
可以通过减少负载、平衡机械系统或检查驱动器工作情况来降低噪音。
8.电机电流异常:电机电流异常可能是由于负载过重、驱动器故障或电源电压不稳定等原因引起的。
解决方法可能是减少负载、更换驱动器或修复电源故障。
除了以上列举的常见故障之外,还有一些其他故障可能会出现,例如过压、过流、断电等。
针对不同的故障情况,需要根据具体情况进行检查和修复。
此外,定期进行维护和保养也是预防故障的重要措施,可以延长伺服电机的使用寿命。
台达伺服驱动器常见异常报警及其排除方法1.过压报警:这是指伺服驱动器输入电压超过额定值引起的报警。
解决方法包括:-检查电源供应是否符合要求,确保输入电压稳定。
-检查线路连接是否正确,排除接线问题。
-检查电源模块是否损坏,如需要更换。
2.过流报警:这是指伺服驱动器输出电流超过额定值引起的报警。
解决方法包括:-检查负载是否过重,根据实际负载情况调整设定参数。
-检查伺服驱动器输出是否短路,排除短路问题。
-检查伺服驱动器内部电路是否损坏,如需要更换相关部件。
3.过速报警:这是指伺服驱动器转速超过额定值引起的报警。
解决方法包括:-检查伺服电机控制系统的参数设置,调整相应参数限制最大速度。
-检查反馈装置是否正确安装、接线是否良好。
-检查伺服电机机械结构是否出现故障,如需要修复相应部件。
4.过载报警:这是指伺服驱动器输出力矩超过额定值引起的报警。
解决方法包括:-检查伺服电机负载情况,确保负载在驱动器输出范围内。
-检查伺服电机输出轴与负载连接部位是否松动,如需要紧固。
-检查伺服电机是否需要进行电流限制调整。
5.过热报警:这是指伺服驱动器内部温度过高引起的报警。
解决方法包括:-检查伺服驱动器散热设备是否正常工作,如需要清洁或更换。
-检查环境温度是否过高,如需要增加散热设备。
-检查输出功率是否过大,根据实际情况调整负载或功率。
6.通信报警:这是指伺服驱动器与上位机通信异常引起的报警。
解决方法包括:-检查通信线路连接是否正常,确保连接稳定。
-检查通信协议参数是否设置正确,如波特率、数据位等。
-检查上位机软件设置是否正确,如通信端口等。

伺服电机的13种故障及维修知识汇总伺服电机是一种将电能转化为机械能的设备,广泛应用于各种机械设备中。
尽管伺服电机在工作过程中有着高效、准确和可靠的特点,但是由于各种原因,仍然存在一些故障。
下面将介绍一些常见的伺服电机故障以及相应的维修知识。
1.电机无法启动:-检查电源线路和继电器是否正常。
-检查电机的供电电压是否符合要求。
-检查电机驱动器的软件是否设置正确。
2.电机运行速度不稳定:-检查电机驱动器的PID参数设置是否正确。
-检查电机的编码器是否损坏或松动。
3.电机运行过热:-检查电机的散热器是否正常工作。
-检查电机驱动器的电流限制是否设置正确。
-检查负载是否过重。
4.电机产生噪音:-检查电机的轴承是否需要润滑或更换。
-检查电机的定子线圈是否故障。
5.电机振动:-检查电机是否与机床固定牢固。
-检查电机的平衡性。
6.电机控制精度低:-检查电机驱动器的PID参数设置是否正确。
-检查电机的编码器分辨率是否满足要求。
7.电机出现漏油:-检查电机的密封圈是否损坏。
-检查电机的润滑系统是否正常工作。
8.电机无法停止:-检查电机驱动器的停机指令是否正常传递。
-检查电机的反馈信号是否正常。
9.电机电流过大:-检查电机负载是否过重。
-检查电机驱动器的电流限制是否设置正确。
10.电机震荡:-检查电机的电源线路是否干净稳定。
-检查电机驱动器的PID参数设置是否正确。
11.电机输出功率下降:-检查电机的定子线圈是否烧损。
-检查电机的轴承是否损坏。
12.编码器信号异常:-检查编码器的连接线是否松动。
-检查编码器是否需要校准。
13.电机无法停留在设定位置:-检查电机驱动器的PID参数设置是否正确。
-检查电机的编码器是否损坏或松动。
维修故障通常需要一定的专业知识和技能。
在维修伺服电机时,应首先确保安全,并遵循以下步骤:1.确认故障现象:准确了解电机的故障现象和表现。
2.断电检查:断开电源,确保电机处于安全状态。
3.检查电缆连接:检查电机的电缆连接是否松动或损坏。

1.增量型伺服初次上电报警解决步骤:报警代码涉及参数设定值AL013 P2-15 0AL014 P2-16 0AL015 P2-17 0更改完参数,需重新上电。
2.绝对值伺服初次上电报警解决步骤:除了以上问题,还有绝对值伺服本身的设定参数。
绝对值伺服上电会报AL060绝对值伺服设定步骤:2-08 先设30 再设28(断电上电)2-69 12-08 2712-71 10-49 1看0-510-523.测试过程中,出现报警及解决方法:报警代码涉及参数(故障原因)设定值(或修改方法)AL006 启动短时间报警电机堵转,U V W 接错AL011 位置检出器异常查看编码器线,或排除干扰AL018 若是伴随AL011出现按AL011处理AL009 P2-35上限值检查负载或者电子齿轮比设定AL018 确认以下条件是否产生:P1-76<电机转速与1 46 4 19.8 10660电机转速P 正确设定参数P1-76 与P1-46:P1-76>电机转速与1 46 4 19.8 106AL024 编码器初始磁场错误(磁场位置UVW 错误电机接地端是否正常接地2. 编码器讯号线,是否有与电源或大电流的线路分开,避免干扰源的产生3. 位置检出器的线材是否使用隔离线AL026 1. 电机接地端是否正常接地2. 编码器讯号线,是否有1. 请将UVW 接头的接地端(绿色)与驱动器的散热部分与电源或大电流的线路分开,避免干扰源的产生3. 位置检出器的线材连接2. 请检查编码器讯号线,是否有与电源或大电流的线路确实的分隔开3. 请使用含隔离网的线材4.当运行过程中电机出现明显的抖动或震动:需手动调增益看看效果手动模式调增益:当P2-32设定为0时,速度回路的比例增益(P2-04),积分增益(P2-06),和前馈增益(P2-07),可自由设定。
比例增益:增加增益会提高速度回路响应带宽积分增益:增加增益会提高速度回路低频刚度,并降低稳态误差。
伺服电机出现故障的常见原因有那些?伺服电机可以控制速度,位置精度⾮常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转⼦转速受输⼊信号控制,并能快速反应,在⾃动控制系统中,⽤作执⾏元件,且具有机电时间常数⼩、线性度⾼等特性,可把所收到的电信号转换成电动机轴上的⾓位移或⾓速度输出。
分为直流和交流伺服电动机两⼤类,其主要特点是,当信号电压为零时⽆⾃转现象,转速随着转矩的增加⽽匀速下降。
伺服电机常见问题以及正确的维修⽅法1. 电源或驱动器故障⼀种可能是伺服电机电源不⾜或驱动器损坏。
在这种情况下,电机本⾝是好的,但是外部系统的故障会导致它出现故障。
有故障的驱动器或电源可能会通过在流向电机的电源中产⽣电压尖峰或不规则来损坏伺服电机。
通常,绕组需要重绕。
2、轴承故障通常,困扰伺服电机的是轴承故障。
磨损或未润滑的轴承会引起刺⽿的刺⽿噪⾳或呜呜声,因此如果您的电机出现这种症状,则可能是轴承造成的。
有时您可以更改设置和参数来弥补这个问题,但如果这不起作⽤,您可能需要更换伺服电机的轴承。
⼀定要⽴即这样做——随着时间的推移,有故障的轴承会导致电机完全故障。
3. 灰尘刹车布满灰尘的制动器也会导致伺服电机发出尖锐的尖叫声。
如果您的伺服电机有刹车,刹车⽚上的灰尘可能会渗⼊刹车本⾝。
然后灰尘会移动到轴承上,吸收油,并导致摩擦和尖叫。
尽管伺服电机轴承通常有防护罩,但灰尘通常会设法侵⼊并破坏它们。
4、定位误差定位错误也会导致伺服电机出现问题。
如果发⽣这种情况,电机将静⽌不动并发出嗡嗡声或颤动声,输出轴即使处于静⽌状态也会轻微摆动。
5. 设置问题或参数丢失设置问题和参数丢失会导致与定位错误类似的抖动问题。
您可以通过运⾏电机和驱动器的设置程序来检查这些问题是否是导致故障的原因。
如果不是,则电机中的反馈问题可能需要维修。
6. 电⽓故障电容器、电阻器、⼆极管、编码器、旋转变压器和其他电⽓元件都会随着时间的推移⽽磨损。
随着您的电⽓设备性能下降,它最终会开始损害您的电机性能并需要维修。
所谓的PUU (Pulse of User Unit)用户单位,为一个经过电子齿轮比的用户单位,这样的设计,可以让使用者不必自行转换外部实际物理Encoder回授量与电子齿轮间的关系。
例如:ASDA-A2的encoder,每转一圏,物理量将回授1280000个脉波,如果想要改变马逹走一圏时的回授脉波数,例如100000个脉波当作一圏,则可以设P1-44(N) =128;P1-45(M) =10,当马逹转完一圏时,ASDA-A2会收到100000个脉波,这个经过电子齿轮比运算的100000,其单位即为PUU,如果要在控制器内部下逹马逹走两圏的命令时,只需根据所定义的PUU下200000个PUU命令,控制器内部会自动换回其实际的物理量,这个用法很直觉,下图为其运算原理。
一般一直认为同样的负载、同样的惯量(切刀伺服),使用同等1. 并不是高惯量就一定好,低惯量就一定差,要看其应用场合。
T= I x α (扭力= 惯量x 角加速度)P= T x ω (功率= 扭力x 角速度)P = I x α x ω所以,同样的功率之下,若惯量提升,加速度必下降,即加减速的特性变差了,当然,角速度也会相对变化,在此我们先假设其运转速度不变。
I是固定的,当一个系统设定好后(如飞刀系统,因为飞刀不变,但如果用于输送带,惯量则会变,当输送带上的物品变多时,拖的力量需加大)。
所以,你可以利用T= I x α 来估其加减速的大小及所需的扭力α = (目标转速- 初始速度) / (初始速度到目标速度所需时间)若一个系统需1 N-m的扭力,则高惯量与低惯量的马逹皆可逹成时,如果要其反应快一点,转快一点,则低惯量会是比较理想的选择。
用以上的公式,也可以轻而易举的解释,因为低惯量马逹,其转子惯量比较低,转子比较轻,所以要停下来,回生的能量比较少,以同样的速度撞墙,胖子撞的力量会比瘦的大。
总而言之,如果要反应快,加减速特性好,如果扭力值够的话,选用低惯量的马逹会比较理想,如果要求是要大扭力的,如举重物,则可能要选用高惯量的马达。
三相機種的變頻器是否可以接單相入力電源?
台達變頻器為單相及三相機種,其最大的差異在於電容的配置。
單相機種會配置比較大的電容,因此若三相機種只接單相入力,可能導致輸出電流不足,且會發生欠相的異常。
為確保系統正常運行,請搭配使用正確的電源系統。
變頻器使用
在硬體上需加裝PG卡,在PG卡上的開關設置編碼器為Open-Collector或是
Line-Driver型式,並設置正確的電壓大小。
在參數上,設定編碼器每轉的脈波數及輸入脈波型式。
以台達VFD-VE系列變頻器為例,選用EMV-PG01X的PG卡,且編碼器一圈有1024個脈波,為Open-Collector 12V型,此時,PG卡需設置(如下圖)
在參數設定方面,需設定參數10-00每轉脈波數為1024。
另外,在設定10-01之前,需先確定該編碼器的脈波型式為AB相、脈波加方向或單一脈波,再加以設定。
之後只要將參數00-04設為7,就可以在使用者顯示的內容看到馬達實際由編碼器回授的轉速。
無感測向量控制
a.優異開迴路速度控制,不必滑差補償
b.在低度時有高轉矩,不必提供過多之轉矩增強
c.更低損耗,更高效率
d.更高動力響應- 尤其是階梯式負載
e.大馬達有穩定之運轉
f.在電流限制,改善滑差控制有較好之表現
在台達交流馬達驅動器的輸入
電源輸入側電抗器
用於變頻器/驅動器輸入端,電抗器保護著靈敏電子設備使其免受變頻器產生的電力雜訊干擾(如電壓凹陷、脈衝、失真、諧波等),而藉由電抗器吸收電源上的突波,更能使變頻器受到良好的保護。
變頻器/驅動器輸出側電抗器
在長距離電纜接線應用中,使用IGBT保護型電抗器於馬達與變頻器之間,來減緩dv/dt值及降低馬達端的反射電壓。
使用負載電抗器於輸出端,可抑制負載迅速變化所產生的突波電流,即使是負載短路亦可提供保護。
何謂控速比
可控速範圍是以馬達的額定轉速為基準,在定轉矩操作區中為維持額定轉矩,其額定轉速與最低轉速的比值,例如一典型交流伺服馬達的可控速範圍為1000:1,亦即若馬達的額定轉速為2000 rpm/min,其最低轉速為2 rpm/min;而且在此控速範圍內,由無載至額定負載時,其轉速誤差百分比值均能滿足所設定的控速精度,如+-0.01%。
轉速誤差百分比值是由下式計算:(如下圖)
什麼是變頻器的失速防止功能?
如果給定的加速時間過短,變頻器的輸出頻率變化遠遠超過轉速的變化,變頻器將因流過過電流而跳機,而自由運轉停止,這就是失速。
為了防止失速使馬達繼續運轉,就要檢出電流的大小進行頻率控制。
當加速電流過大時,適當放慢加速速率。
減速時也是如此。
兩者結合起來就是失速防止功能。
變頻器的哪些模式可以調整馬達轉速?
變頻器上的轉速控制主要有以下:
1. 直接從變頻器面版上的可變電阻調整
2. 外接類比電壓或電流信號來調整
3. 利用變頻器的多功能輸入端子可達成多段速控制
4. 台達變頻器支援Modbus通訊,可利用上位控制器以通訊的方式改變變頻器轉速。
請問
可以,只要韌體版本為4.08版,即可運轉到2000Hz。
請問
不可以,因為EF輸入端子是數位端子,只有開及關的狀態而已,所以不能作為PTC的輸入端。
請問
可以,沒問題。
何謂向量控制
在AC馬達中,轉子由定子繞組感應來的電流產生磁束場。
定子電流包含兩個成份,一個影響磁束場,另一個影響馬達輸出轉矩。
磁束向量控制可分別控制此二成份,因此可以分別控制轉矩與速度。
何謂變頻器的
自動量測即自動找出馬達的參數,如無載電流、定子阻抗、轉子阻抗、定子感抗、
轉子感抗等。
有了這些參數後才能作「轉矩估算」及「轉差補償」。
也因此技術,在無編碼器的運轉下仍能獲得良好的轉速精確度。
無編碼器運轉
1.配線精省
2.不用擔心RF雜訊對編碼器低電壓信號的影響
3.在多振動的場合不用擔心編碼器的高故障率
何謂失速防止功能?
如果給定的加減速時間過短,變頻器的輸出頻率變化比馬達轉速的變化還要快,變頻器將因過電流而停止運轉,這就叫作失速。
為了使馬達正常運轉,必須要以輸出電流的大小來進行頻率控制。
因此,當輸出電流過大時,就必須要適當放慢加速速率,此即為失速防止功能。
加速時間與減速時間分別給定的變頻器及加減速時間共同給定的變頻器,在應用上
對於加速快減速慢及需要嚴格要求生產時間順序的應用,皆需要分別給定加減速. 但對於風機傳動等應用,加減速時間都較長,因此加速減速時間可以共同給定。
變頻器是否能夠擁有更大的制動力?
通常變頻器的制動力約為額定轉矩的10%~20%,如果內含或加裝制動單元,可增加變頻器之制動力。
何謂閉迴路控制與開迴路控制?
在馬達上加裝編碼器(PG),並將實際轉速經由PG速度回授卡傳給變頻器進行控制,此即為閉迴路控制。
而開迴路控制,即是無PG回授之控制。
如何解決實際轉速與指定速度有偏差之狀況
變頻器在開迴路控制下,馬達的轉速會在額定轉差率的範圍內(±5%)變動,如果要
求精確度高的轉速,可採用具有PG回授功能的變頻器。
如果使用
一般而言,是會提高的,但取決於encoder(PG) 和變頻器輸出頻率的解析度。
按比例地改
當頻率下降時,電壓會成比例地降低。
由於交流阻抗變小而直流電阻不變,將造成
轉矩在低速下會減少。
因此,在低頻時可提高輸出電壓以獲得較高的起動轉矩,這可由自動轉矩補償、選擇高起動V/f模式(high starting torque V/f curve)以及調整電位元器來實現。
一般而言,
6Hz以下仍可輸出功率。
根據電機溫升和起動轉矩設定等條件,當頻率取6Hz,此時電動機可輸出額定轉矩而不會引起嚴重的發熱問題。
頻率在
通常不可以。
在60Hz以上時(也有50Hz以上的模式),電壓不變,且功率恆定。
如在高速下亦要求固定轉矩時,則必須注意變頻器或特殊馬達之選擇。
何謂
頻率下降時電壓V也成比例下降,而V與f的比例關係則是考慮了電機特性而預先決定的。
電動機使用市電驅動時,電壓下降則電流增加
頻率下降(低速)時,如果輸出相同的功率,則電流增加,但在轉矩固定的條件下,電流
幾乎不變。
如果馬達採用變頻器運轉時,電機的起動電流、起動轉矩怎樣?
一般而言,市電直接起動會產生6~7倍之啟動電流,而造成電氣上的衝擊。
馬達採用變頻器運轉時,可以平滑地起動,並隨著電機的加速相應提高頻率和電壓。
起動電流被限制在150%額定電流以下(根據機種不同,為125%~200%),起動轉矩為70%~120%額定轉矩;且對於帶有轉矩自動增強功能的變頻器,起動轉矩為100%以上,可以帶全負載起動。
什麼是變頻器?
自交流單相或三相商用電源, 以整流器(CONVERTER)整流成直流後, 再以換流部(INVERTER)使直流電壓變成電壓、頻率皆可變的交流電, 用以控制感應電動機轉速及轉矩. 因泛用變頻器在頻率被改變的同時電壓也隨著改變, 故又簡稱
VVVF(Variable Voltage Variable Frequency).
PWM PWM 是英文Pulse Width Modulation(脈衝寬度調製)的縮寫,按一定規律改變脈衝列的脈衝寬度,以調節輸出量和波形的一種調整方式。
PAM 是英文Pulse Amplitude Modulation(脈衝幅度調製)縮寫,是按一定規律改變脈衝列的脈衝幅度,以調節輸出量值和波形的一種調整方式。
為什麼變頻器的電壓與電流必須成比例的改變? 非同步電動機的轉矩是由電機的磁通量與轉子內流過電流之間相互作用而產生的。
在馬達之額定頻率下,如果電壓固定而只降低頻率,那麼就會造成磁通過大、磁回路飽和以及嚴重時將燒毀電機。
因此,頻率與電壓要成比例地改變,即改變頻率的同時也控制變頻器輸出電壓。
電動機的磁通量保持固定,可避免弱磁和磁飽和現象的產生。
這種控制方式多用於風機、泵類節能型變頻器。