数字干涉测量方法及试验
- 格式:ppt
- 大小:338.00 KB
- 文档页数:33
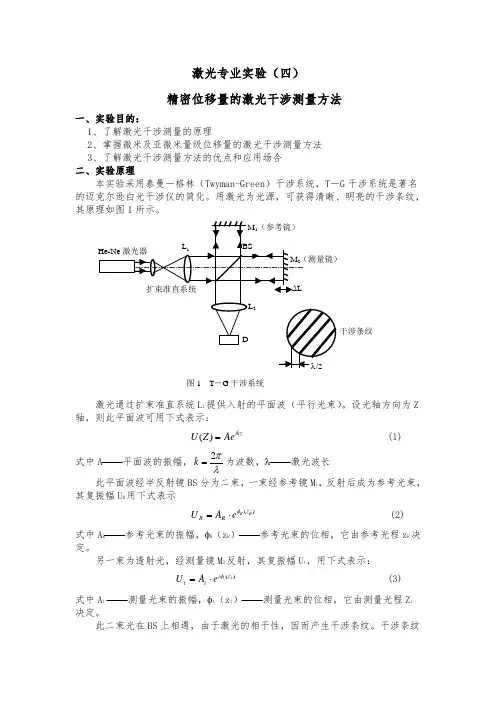
激光专业实验(四) 精密位移量的激光干涉测量方法一、实验目的:1、了解激光干涉测量的原理2、掌握微米及亚微米量级位移量的激光干涉测量方法3、了解激光干涉测量方法的优点和应用场合 二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z 轴,则此平面波可用下式表示: i k z Ae Z U =)( (1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示: )(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),( (4)式中***+=+=t Rt R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2c o s1(2),(0θkl I y x I += (5) 式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。
数字散斑干涉振动测量技术研究进展摘要:数字散斑干涉技术(DSPI)是一种光学测试方法,具有非接触、高灵敏度、全场、实时、无损检测的特点,在振动测量方面有着较大的优势。
本文从图像处理、相移技术等方面阐述了数字散斑干涉振动测量的发展现状,并对其中的关键技术进行了比较和分析。
关键词:数字散斑干涉,振动测量,数字图像处理,相移技术Research Progress on V ibration Measurement Using Digital SpecklePattern InterferometryAbstract:Digital speckle pattern interferometry (DSPI) is an optical testing and measuring method,a non-contact, high-sensitivity, full-field, real-time, non-destructive one, which has an advantage in vibration analysis. This paper introduces the recent progress on DSPI vibration measurement from aspects of digital image processing and phase shifting, also compares and analyzes their key technologies.Keywords:Digital speckle pattern interferometry; Vibration measurement; Digital image processing; Phase shifting0 引言散斑计量技术是现代光测力学技术中的一种。
它具有非接触、无损、全场、高精度、实时测量的特点,在轮廓、应变、位移和振动测量方面有着广泛的应用前景[1]。
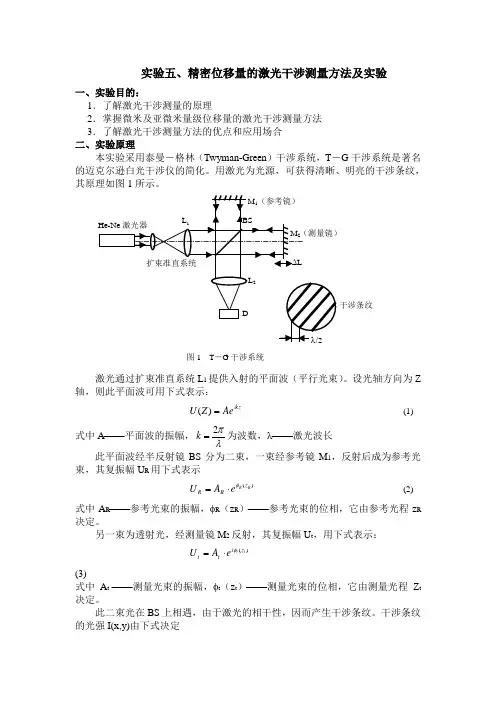
实验五、精密位移量的激光干涉测量方法及实验一、实验目的:1.了解激光干涉测量的原理2.掌握微米及亚微米量级位移量的激光干涉测量方法 3.了解激光干涉测量方法的优点和应用场合 二、实验原理本实验采用泰曼-格林(Twyman-Green )干涉系统,T -G 干涉系统是著名的迈克尔逊白光干涉仪的简化。
用激光为光源,可获得清晰、明亮的干涉条纹,其原理如图1所示。
图1 T -G 干涉系统激光通过扩束准直系统L 1提供入射的平面波(平行光束)。
设光轴方向为Z轴,则此平面波可用下式表示:ikz Ae Z U =)((1)式中A −−平面波的振幅,λπ2=k 为波数,λ−−激光波长此平面波经半反射镜BS 分为二束,一束经参考镜M 1,反射后成为参考光束,其复振幅U R 用下式表示)(R R z R R e A U φ⋅=(2)式中A R −−参考光束的振幅,φR (z R )−−参考光束的位相,它由参考光程z R 决定。
另一束为透射光,经测量镜M 2反射,其复振幅U t ,用下式表示:)(t t z i t t e A U φ⋅=(3)式中A t −−测量光束的振幅,φt (z t )−−测量光束的位相,它由测量光程Z t 决定。
此二束光在BS 上相遇,由于激光的相干性,因而产生干涉条纹。
干涉条纹的光强I(x,y)由下式决定*⋅=U U y x I ),((4)式中***+=+=t R t R U U U U U U ,,而U*,U R *,U t *为U ,U R ,U t 的共轭波。
当反射镜M 1与M 2彼此间有一交角2θ,并将式(2),式(3)代入式(4),且当θ较小,即sin θ≅θ时,经简化可求得干涉条纹的光强为:)2cos 1(2),(0θkl I y x I +=(5)式中I 0−−激光光强,l −−光程差,t R z z l -=。
式(5)说明干涉条纹由光程差l 及θ来调制。
当θ为一常数时,干涉条纹的光强如图22λ⋅=N l (6) 式中N −−干涉条纹数因此,记录干涉条纹移动数,已知激光波长,由式(6)即可测量反射镜的位移量,或反射镜的轴向变动量∆L 。
迈克尔逊干涉仪测量光波的波长实验报告
实验目的,通过使用迈克尔逊干涉仪测量光波的波长,掌握干
涉仪的基本原理和测量方法,加深对光学干涉现象的理解。
实验仪器,迈克尔逊干涉仪、激光光源、平面镜、半透镜、光
电探测器、数字示波器等。
实验原理,迈克尔逊干涉仪是一种利用干涉现象测量光波波长
的仪器。
当一束光线经过半透镜后,被分成两束光线,分别经过两
个镜面反射后再次相遇,产生干涉现象。
通过测量干涉条纹的位移,可以计算出光波的波长。
实验步骤:
1. 调整迈克尔逊干涉仪,使得两束光线在光电探测器上形成清
晰的干涉条纹。
2. 使用数字示波器记录干涉条纹的变化情况,包括干涉条纹的
位移和周期数。
3. 根据干涉条纹的变化情况,计算出光波的波长。
实验结果,通过实验测得光波的波长为λ=632.8nm。
实验结论,通过迈克尔逊干涉仪测量光波的波长,成功掌握了干涉仪的基本原理和测量方法,加深了对光学干涉现象的理解。
同时,通过实验结果验证了光波的波长为632.8nm。
存在问题,在实验过程中,由于仪器调整不够精准,导致测量结果可能存在一定的误差。
在今后的实验中,需要更加精确地调整仪器,以提高测量结果的准确性。
改进方案,在今后的实验中,可以加强对仪器调整的训练,提高操作技能,从而减小误差,获得更加准确的实验结果。
总结,通过本次实验,对迈克尔逊干涉仪测量光波的波长有了更深入的了解,同时也意识到了实验操作的重要性。
在今后的实验中,将更加注重仪器调整和操作技能的训练,以提高实验结果的准确性和可靠性。
迈克尔逊干涉仪实验报告
自查报告。
实验名称,迈克尔逊干涉仪实验。
实验日期,2022年10月10日。
实验地点,XXX大学实验室。
实验目的,通过迈克尔逊干涉仪实验,掌握干涉仪的基本原理和操作方法,观察干涉条纹的形成,并测量出光的波长。
实验过程,在实验中,我们首先搭建了迈克尔逊干涉仪,调整好光源和镜片的位置,使得两束光相互干涉。
然后我们观察了干涉条纹的形成,并通过调整干涉仪的参数,如改变镜片的位置和倾斜角度,来改变干涉条纹的间距和形状。
最后,我们使用干涉条纹的间距来计算出光的波长。
实验结果,通过实验,我们成功观察到了干涉条纹的形成,并且根据干涉条纹的间距测量出了光的波长,结果与理论值相符合。
实验总结,通过本次实验,我们深入了解了迈克尔逊干涉仪的
原理和操作方法,掌握了干涉条纹的观察和测量技巧。
同时,也加
深了对光的波动性质的理解。
在实验中,我们也遇到了一些问题,
例如调整干涉仪的参数需要耐心和细心,需要不断尝试和调整才能
得到清晰的干涉条纹。
通过这次实验,我们不仅学到了知识,也提
高了实验操作的技能。
存在问题,在实验中,我们发现在调整干涉仪参数时,需要更
加耐心和细心,以确保获得准确的实验结果。
同时,在实验报告中,需要更加详细地描述实验步骤和结果,以便他人能够清晰理解。
改进计划,在今后的实验中,我们将更加细心地调整实验仪器,提高实验操作的技能。
同时,在撰写实验报告时,我们将更加详细
地描述实验步骤和结果,以提高报告的质量。
签名,XXX 日期,2022年10月12日。
丝塑,墨凰干涉法技术在量块长度测量中的应用张剑字(广东省计量科学研究院东莞分院,广东东莞523120)脯要】量块是重要的长度实物标准,它将长度单位传i董到工业生产的各个环节.在产品质量保证体系中发挥着重大作用。
本文基于光干涉原理,介绍了干涉法测量量块长度的基本原理,研究了量决长度测量的数字化千涉技术方法。
并在比基础上,详细分析介铝条纹法处理干涉图方法及技术分析。
鹾j套司量块;光于涉测量;条纹法1引言量块是一种高精度的端面量具,它以最简单的几何形状设计,最有利于加工出精确的尺寸。
其中一对相互平行的测量面之间的距离即为其工作长度。
我国与世界上其他国家一样,绝大多数都采用矩形横截面的长方体形量块。
在计量部门和工业校准实验室,它和其测量设备组成的检定系统为溯源国际米标准提供了一种重要手段,其作用在科学研究、工业生产中至关重要。
量块的长度常被用作计量器具的标准,通过它对长度计量仪器、量具和董规等示值误差的检定、对精密机械零件尺寸的测量和对精密机床、夹具在加工中定位尺寸的调整等方式,把机械制造中各种制成品的尺寸,与国家的以至国际的实现米定义所推荐的基准光谱辐射线的波长联系起来,以达到长度董值在全国和国际间的统一,使零件、配件都具有良好的互换性。
长度计量在国防科研和武器生产的质量保证体系中起着重要作用,因此世界各个国家十分关注这一研究领域的技7R进展。
本文介绍对基于干涉法的高等级量燃的测量方法及测量过程中的关键技术进行研究。
2干涉法测量■块长度的基本原理干涉仪输出的是一幅干涉图,借助于数学物理模型,可以将干涉图与多种被测参数相联系,从而实现测量相关的物理参数。
以干涉条纹小数部分重合方式,用光谱辐射线的波长直接测量被测量块的长度,是基于光波干涉理论。
21干涉条纹的小数部分重舍法小数重合法是用于量块高精度测量的主要方法。
1977年,蒂福德对小数重合法做了进—步发展,提出了一套完整的利用多波长尾数确定被测长度的分析方法.其中最重要的两个思想为无导孰绝对距离干涉测量技术发展提供了理论基础,这两个基本思想是合成波长链及利用其进行逐级精化测量结果。
干涉仪测向解模糊方法
做干涉仪的测向解模糊,对测量学家来说是一项重要任务,可以为后续进行特定轨迹设计带来重要的数据支撑。
它涉及到相位计算、数字计算等操作,并且成果的数值比较大,要求行之有效的方式,使测量过程尽可能地快速准确。
因此,关于如何有效地解决干涉仪测向解模糊问题,已经引起了测量学家的极大关注。
1、三点法:即三部分方位角分别求取,相加即可得到总方位角。
三点法虽然在测量中非常常用,但仍有解模糊的问题。
2、最小二乘法:利用坐标系与其他应用求解函数的系数,改用于解干涉仪测向解模糊问题,被称为最小二乘法。
这种方法,更加准确,但计算时间较长,占用较多计算机处理能力。
3、模糊反解法:该法采用模糊计算,配合一些特定算法,可以在特定条件下反向解决问题,可以较快求得解模糊坐标φ。
二、改进法
1、模糊随机搜索法:即利用模糊计算的基本原理,将随机搜索和模糊计算结合起来,以搜索性质的方式,寻找可行的解决方案,进而求出φ的合理值。
2、理综合优化模糊解模糊法:即利用优化模糊算法,根据单位误差约束或最大化准则求取最优解,从而获取干涉仪测向解模糊坐标φ。
3、模糊神经网络法:采用模糊理论、搜索算法以及神经网络相结合,以实现参数优化,求取较为精确的解模糊坐标φ。
总之,干涉仪测向解模糊是一个重要的任务,得到解决需要考虑现有的多种方法。
上述三类解决方法都有其不同的优势。
在实际的测量中,以上的方法可以各自尝试,取最适合的一种,并进行更进一步的研究和应用。
分析光的干涉现象及干涉条纹计数方法光的干涉现象是光学中一个非常重要的现象,它揭示了光波的波动性质。
干涉现象指的是当两束或多束光波相遇时,由于光波的叠加作用,会出现明暗相间的干涉条纹。
这些干涉条纹可以用来测量光的波长、光源的相干性以及介质的折射率等。
首先,我们来了解一下光的干涉现象是如何产生的。
当两束光波相遇时,它们的电场分量会相互叠加,形成新的电场分量。
如果两束光波的相位差为整数倍的波长,那么它们的电场分量将完全相消,形成暗纹;如果相位差为奇数倍的半波长,那么它们的电场分量将完全叠加,形成亮纹。
这种干涉现象可以通过杨氏双缝干涉实验来观察到。
在杨氏双缝干涉实验中,一束单色光通过一个狭缝射到一个屏上,形成一个狭缝光源。
这个光源经过一个透明薄膜,再通过一个狭缝,最后射到另一个屏上。
当两束光波相遇时,就会产生干涉现象。
观察屏上的干涉条纹,我们可以推断出光的波长和光源的相干性。
干涉条纹的计数方法有多种。
其中一种常用的方法是利用干涉条纹的亮纹与暗纹之间的间距来计数。
我们可以使用显微镜或者放大镜来观察干涉条纹,并使用标尺或者测微器来测量亮纹与暗纹之间的间距。
通过测量多个亮纹与暗纹的间距,并取平均值,我们就可以得到比较准确的干涉条纹计数结果。
另一种常用的方法是利用光的干涉现象来测量物体的形状。
例如,我们可以利用干涉条纹的变化来测量薄膜的厚度。
当一束光波从空气射到一块薄膜上时,会发生反射和折射。
如果薄膜的厚度是波长的整数倍,那么反射光和折射光之间的相位差为整数倍的波长,会产生明亮的干涉条纹。
通过观察干涉条纹的变化,我们可以推断出薄膜的厚度。
除了以上提到的方法,还有一些其他的干涉条纹计数方法。
例如,我们可以利用光的干涉现象来测量光源的相干性。
相干性是指两束光波的相位关系是否稳定。
通过观察干涉条纹的清晰程度和稳定性,我们可以判断光源的相干性。
如果干涉条纹清晰且稳定,那么光源的相干性较好;反之,如果干涉条纹模糊或者不稳定,那么光源的相干性较差。